自宅のワークショップで個人的な自動制作について学び、クリエイターのアイデアがどのように完成品に変わるかを学びます。 ボックスにないものを自動化するために、JVMとgroovy / javaからCNCマシンにGコード命令を送信するアプローチを検討してください。
この出版物が、JVMプログラマー、IoTトピックに興味のある人、いじくりに不慣れな人、3Dプリンターの購入を考えている人、任意のシステムのプロトタイプを作成し、Raspberry PI / Beagleboard Blackでソフトウェアを実行した人に有益であることを願っています。 私がお話しすることは、オープンソースソフトウェアとオープンハードウェアを繰り返し使用することができます。
内容
会議「ソフトウェア開発」(SECR-2016)での私のミニレポートに基づいています。 ハードウェアとソフトウェアの両方での経験と同様。
レポートのビデオ録画...
まえがき
聴衆に訴える。
おはようございます、親愛なるリスナー。 目覚めて、週末の朝に来てくれてありがとう。 ホールでお会いできてうれしいです! あなたと私は報告する時間があまりないので、ホールには質問と回答のセクションはありませんが、報告後に質問をすることができます。 最後のスライドには、返信するメールアドレスがあります。
レポートについてのあなたの意見は私にとって非常に重要です。 近い将来、理論的に説明することを実行してCNCを制御することが実際に可能になる会議を開催する予定です。 それはオープン/無料のイベントであり、モスクワにいる人は誰でも参加できます。 近い将来、場所を見つけて、meetup.comで会場の例と場所の情報を準備したいと思っています。 興味のある方は、メールアドレスに書いていただければ、イベント通知をお送りします。 記事への注:もちろん、この会議の結果をhabrahabrの読者向けに公開します。参加することもできます。
レポートについてのあなたの意見は私にとって非常に重要です。 近い将来、理論的に説明することを実行してCNCを制御することが実際に可能になる会議を開催する予定です。 それはオープン/無料のイベントであり、モスクワにいる人は誰でも参加できます。 近い将来、場所を見つけて、meetup.comで会場の例と場所の情報を準備したいと思っています。 興味のある方は、メールアドレスに書いていただければ、イベント通知をお送りします。 記事への注:もちろん、この会議の結果をhabrahabrの読者向けに公開します。参加することもできます。
「ホームワークショップのCNCマシンが2人のcasのヒーローの漫画にならない方法」についてのレポートを開始します。 この漫画の内容を誰が見て覚えていますか?
聴衆からの声:「みんなが見た」
まあ、それはあなたが私が話すことについて知っていることを意味します。 そして、レポートの最後に、JavaとGroovyでマシンをプログラムで制御しようとします。
聴衆への別の質問。 エンジニア、デザイナー、生産技術者として働いているCNCマシンを常に使用しているのは誰ですか? 聴衆から否定的な答えが聞こえます。 だから、それは私にとってはるかに簡単であり、トロールしないでください。 業界でこれらのテクノロジーを毎日使用している人々は、ツールのコスト、トピックへの没入度、および私のプレゼンテーションスタイルからばかげています。
CNCマシン
仕事について何を知っていますか? 人間の仕事と労働は常に2つの方法で起こりました。
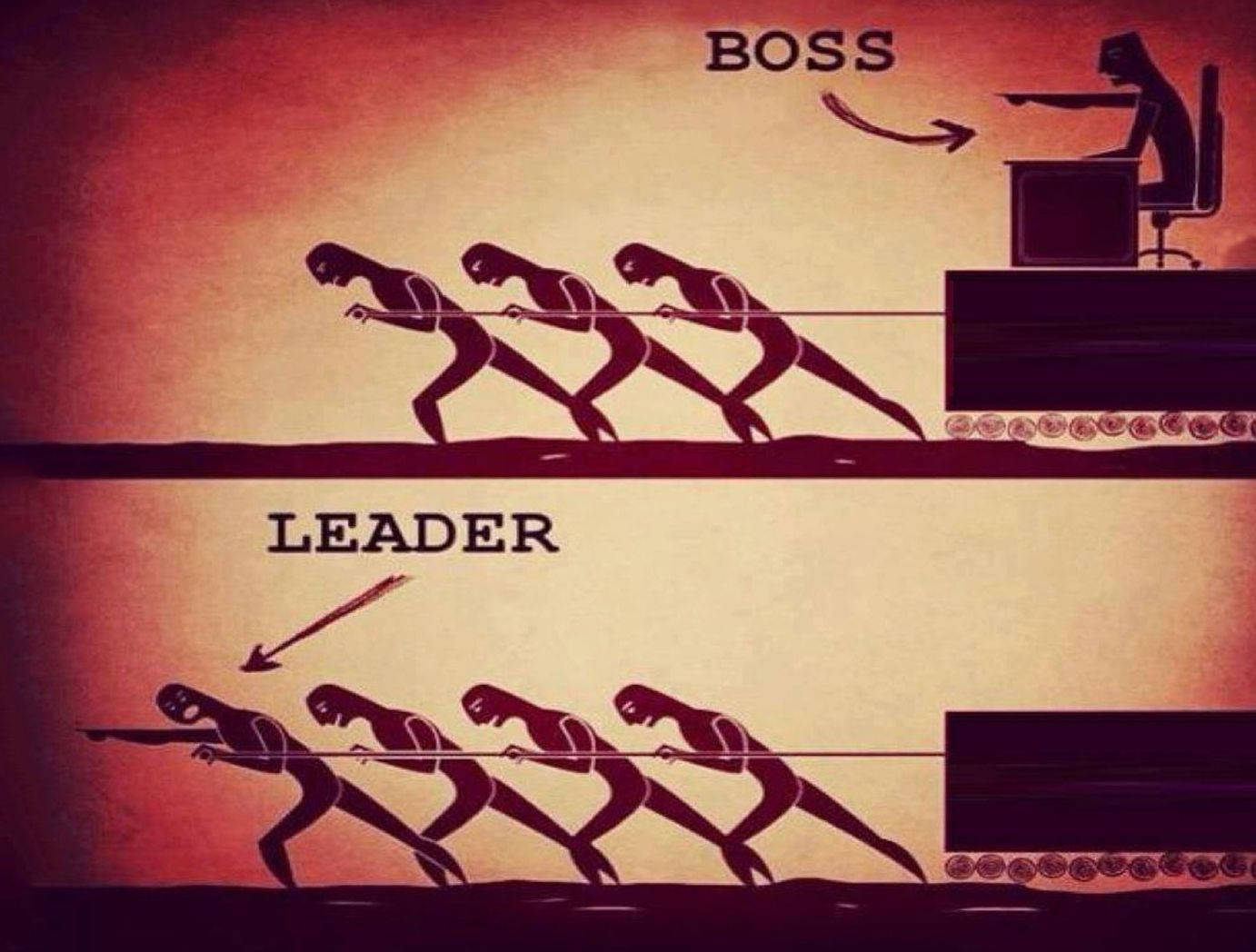
働く人をコントロールするか、自分自身を活用して全員と一緒に仕事をするか、一緒に1つの「ストラップ」を引きます。
この写真では、発明者とエンジニアがより便利なツールを発表したことを考慮していません。
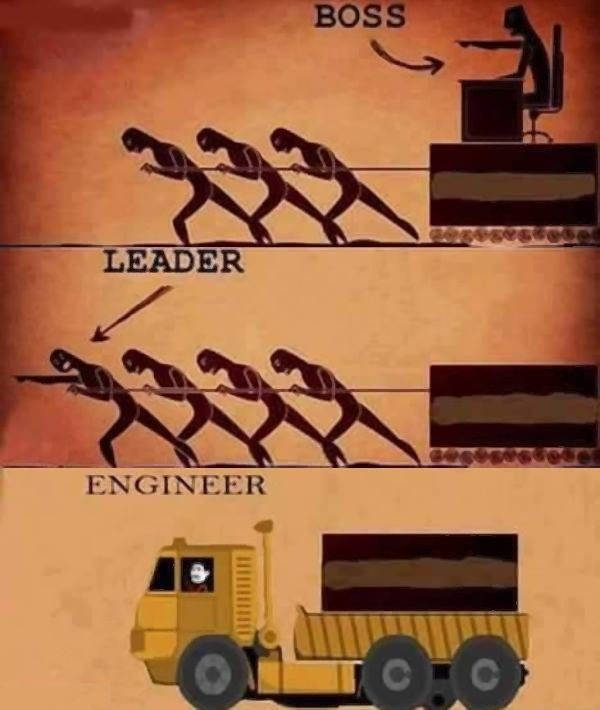
労働を簡素化するテクノロジーは、生活をより快適にし、人々が知的なことをし、仕事を車に残すことを可能にします。
おそらく誰もが、漫画「遠方のヴォフカ」の少年が自分の願いを叶えたかったのを覚えているだろうが、彼は自分で何もしたくなく、何も学びたくなかった。
遠くの王国で、彼は顔から同一の2つのofに来ました。 彼らは経営者であり、彼のためにすべてをしましたが、彼が必要としていたのではありませんでした 。
また、おそらくこれら2つを覚えています。
ハゲワシは、たくさんのおいしいところに彼とダチョウを呼びました。 ダチョウが走ったとき、ハゲタカは彼を止めて、「一日を失ってから5分で飛ぶ方がいい」と言いました。 繰り返し作業を頻繁に行う場合、自動化の「日」を失う方が簡単かどうかを考える必要があります。
これからお話しするテクノロジーは、20世紀の70年代です。 これらは、メモリに格納されているプログラムによって制御されるマシンです。 以前は、これらはパンチカードでしたが、最近はフラッシュドライブです。 生産では、自動機にはさまざまなサイズ、異なる運動学的スキームがあり、材料処理を実行するさまざまなツールを装備できます。
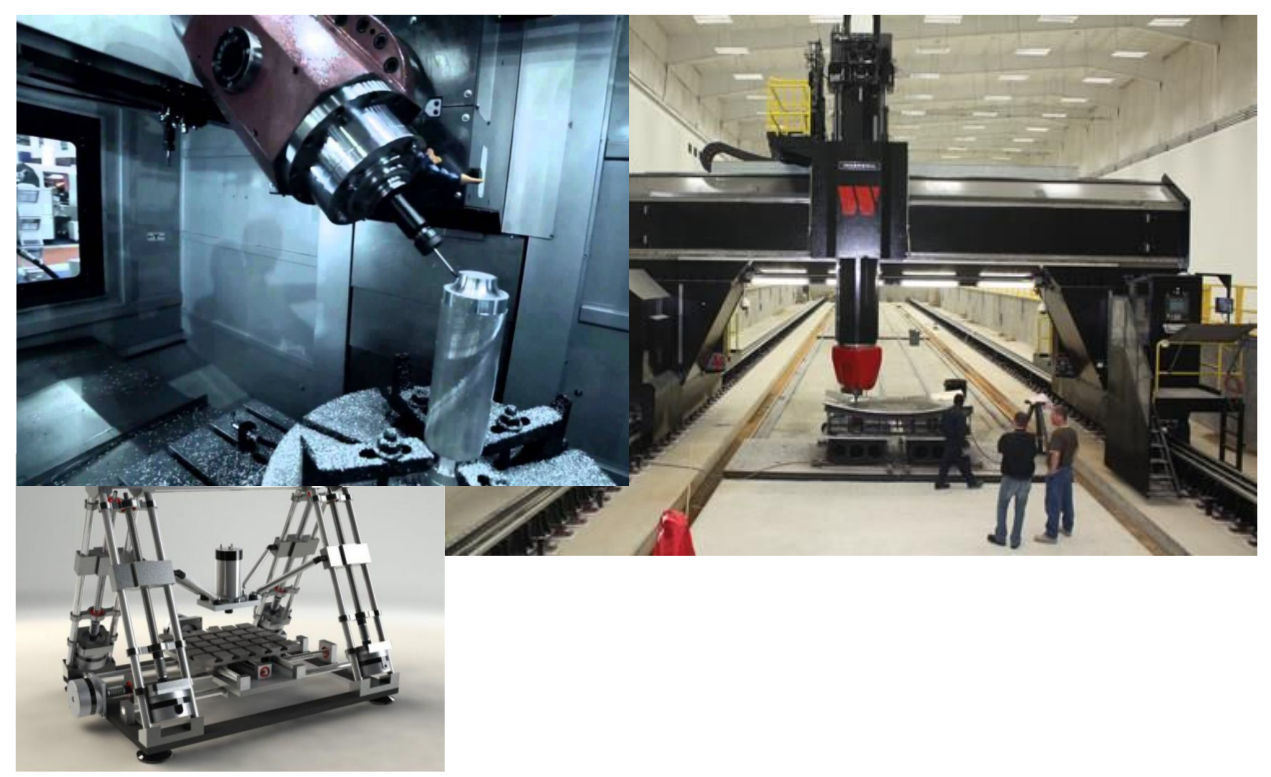
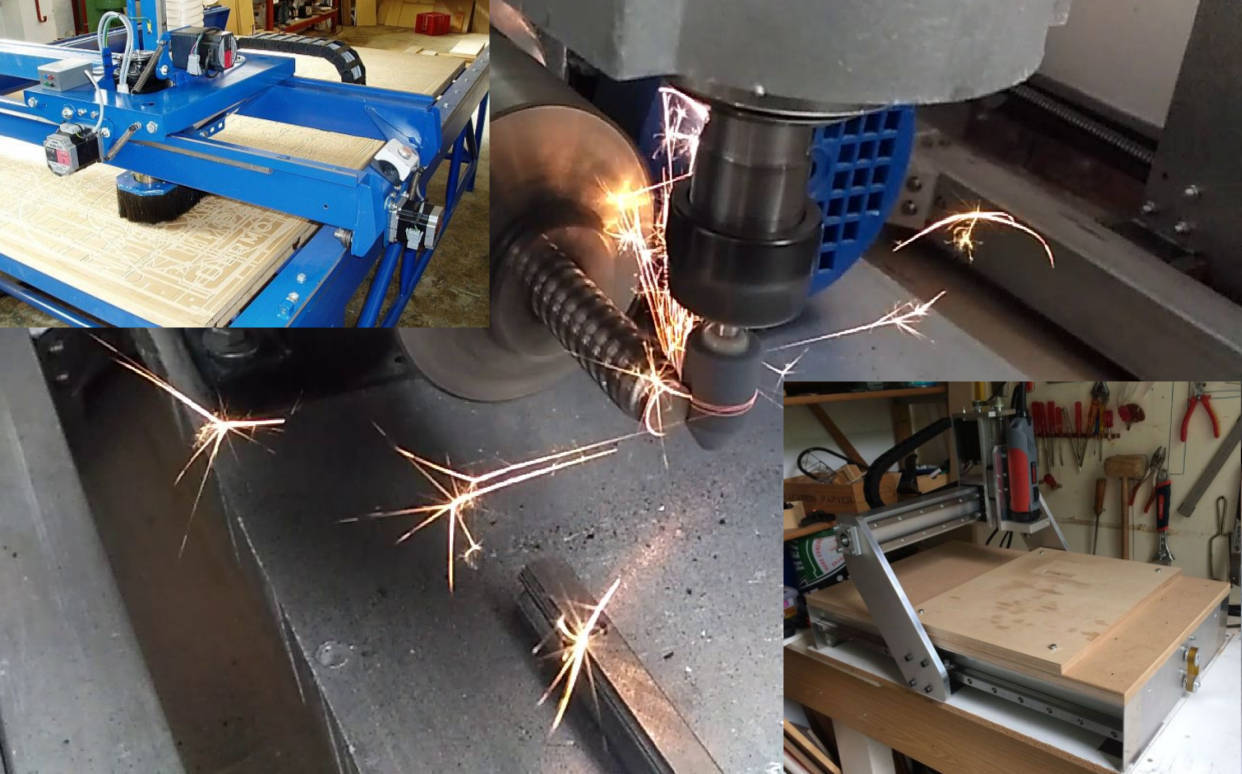
ホームワークショップでは、すべてがより平凡です。 基本的に、機械-AliExpressまたは中王国からのブランド変更の「メーカー」の輸入業者との品揃え。 何でも購入できますが、スペアパーツを購入して自分で組み立てることができます。
時間とお金を気の毒に思うなら、フレームとポータルを製造するための経験と機械へのアクセスがないので、既製を購入する方が簡単です。 一方、自分で収集することは非常に興味深い経験です。 Shapeoko、MechMate CNCルーター、Zenbot CNCなどのプロジェクトもあります。
CNCマシンで何ができるのか、ワークショップでそれが必要なのはなぜですか? 木工を行ったり、修理用の装飾パネルを作成したりできます。 または、あなたは創造的な考えを持ち、その結果は既製で販売されていません。 あなたはまだ家庭用機器の修理のための部品を作ることができます。 たとえば、非鉄金属製のティーポットや汽船用のスペアパーツや修理用のスペアパーツは、販売センターやサービスセンターでは利用できません。 3Dプリンターの場合のように、1台のマシンで別のCNCのスペアパーツを作成することは可能ですが、パーツ製造の材料としてプラスチックに限定されません。
ソフトウェアの観点から見ると、CNC、3Dプリンター、プロッターの間にほとんど違いはありません。 作業ツールは異なりますが、多くの3Dプリンターは同じコマンド言語で大型の産業機械のように制御されます。
ダチョウが走って飛べなかった漫画を思い出します。 ハゲワシは翼が優れていると言い、ダチョウは足を言います。 漫画の終わりに、トカゲが現れ、 主なものは尾であると言います。 彼女の尾は最初に彼女の命を救った。 CNCを使用する場合は、生命と健康の危険を思い出し、 安全上の注意事項を守ってください。 CNCには、切削工具、大規模な可動部品および回転部品が含まれています。

電気駆動装置は、絶縁が破壊された場合、ハウジングと接触する危険に満ちています。 作動している電気ドライブの電源を切らずに消そうとさえしないでください。
モデルからGコードへ
ほとんどすべてのCNCマシンはGコードで制御されます。 これは、コマンドおよびデータのテキスト形式であり、国際標準として受け入れられています。 ただし、異なるメーカーのマシンの特定の実装には、制御プログラムを別のマシンに移植できないようにする拡張機能が含まれています。
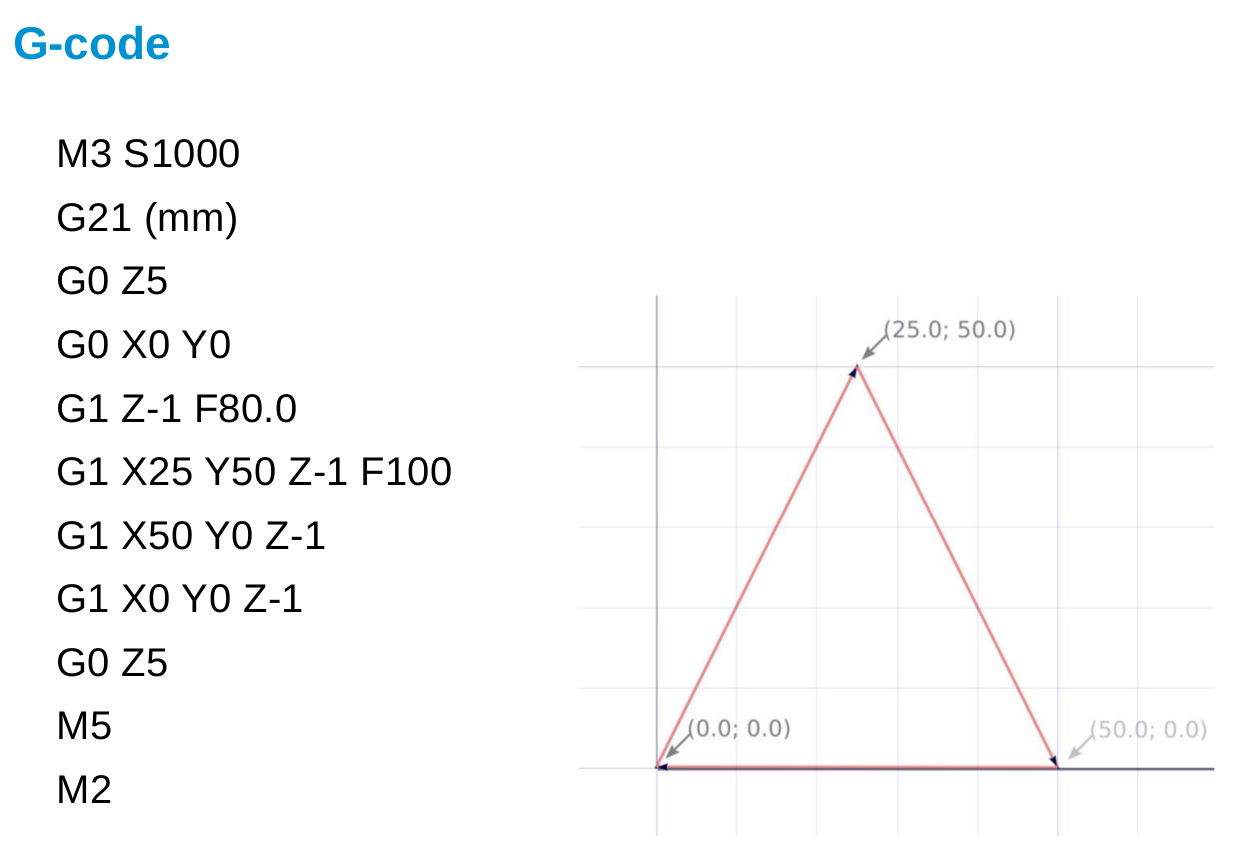
このスライドの制御プログラムは、平面上の三角形を製粉します。
G21は、プログラムの単位はミリメートル単位になると述べています。
M3設定速度Sでスピンドルをオンにします。
G0は、現在の座標からコマンドで指定された座標への線形補間でアイドル時に作業ツールを移動します。
G1も線形補間を使用しますが、これはFが送り速度を示す処理モードです。
M5はスピンドルを停止します。
M2はプログラムを完了します
この例では複雑なことはありませんが、実際にはGコードを手動で記述することはほとんどありません。 通常、モデルは何らかの形で作成され、それに基づいて制御プログラムが作成されます。
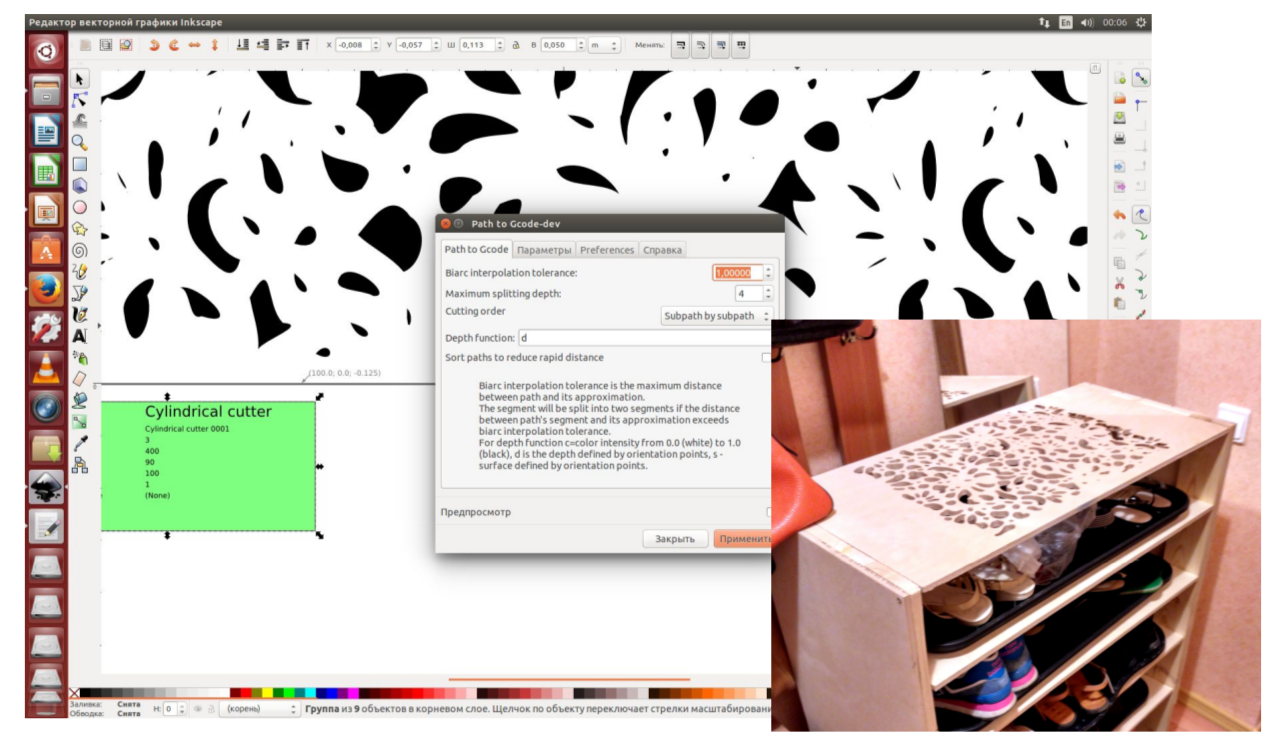
Inkskapeなどのベクターエディターで輪郭を作成し、GCodeToolsオープンソースソフトウェアを使用して、マシンのGコードプログラムに変換できます。 このアプローチは、設計者にとって便利です。
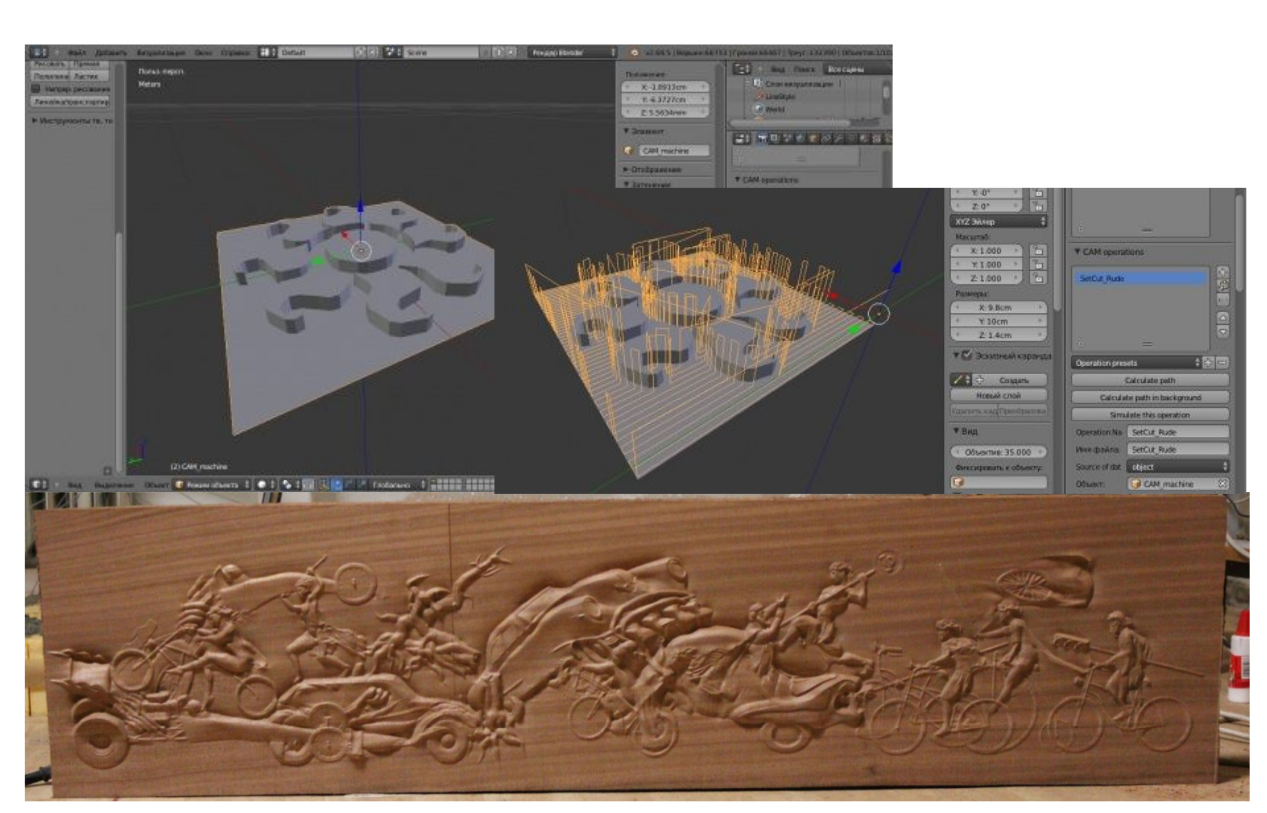
Blenderでの作業に慣れている人は、オープンソースのBlenderCAMを使用して3Dモデルを2.5Dレリーフに変えることができます。
数十万ドルから数十万ドルに相当する産業用CADシステムは、趣味で使用することはできません。 ただし、オープンソースソフトウェアのFreeCADは使用できます。
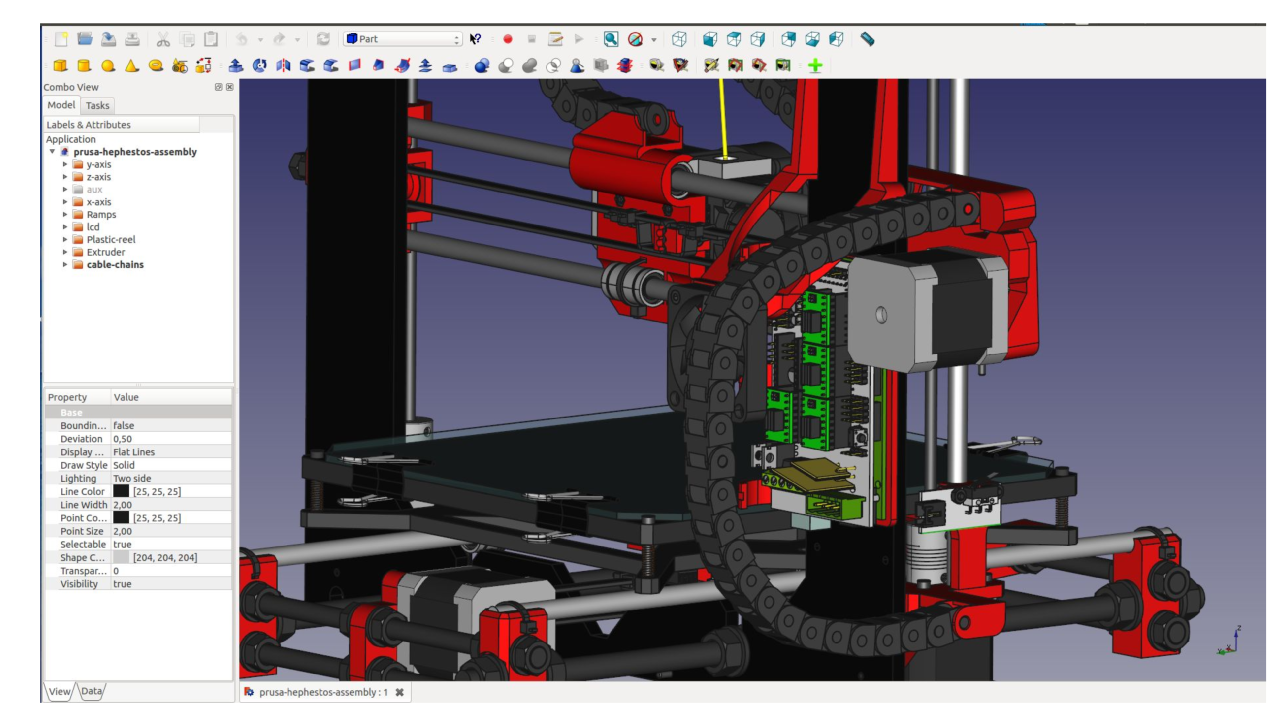
利便性と機能の点では高価なCAD / CAMパッケージに匹敵するものではありませんが、単純なタスクでは設計には十分かもしれません。
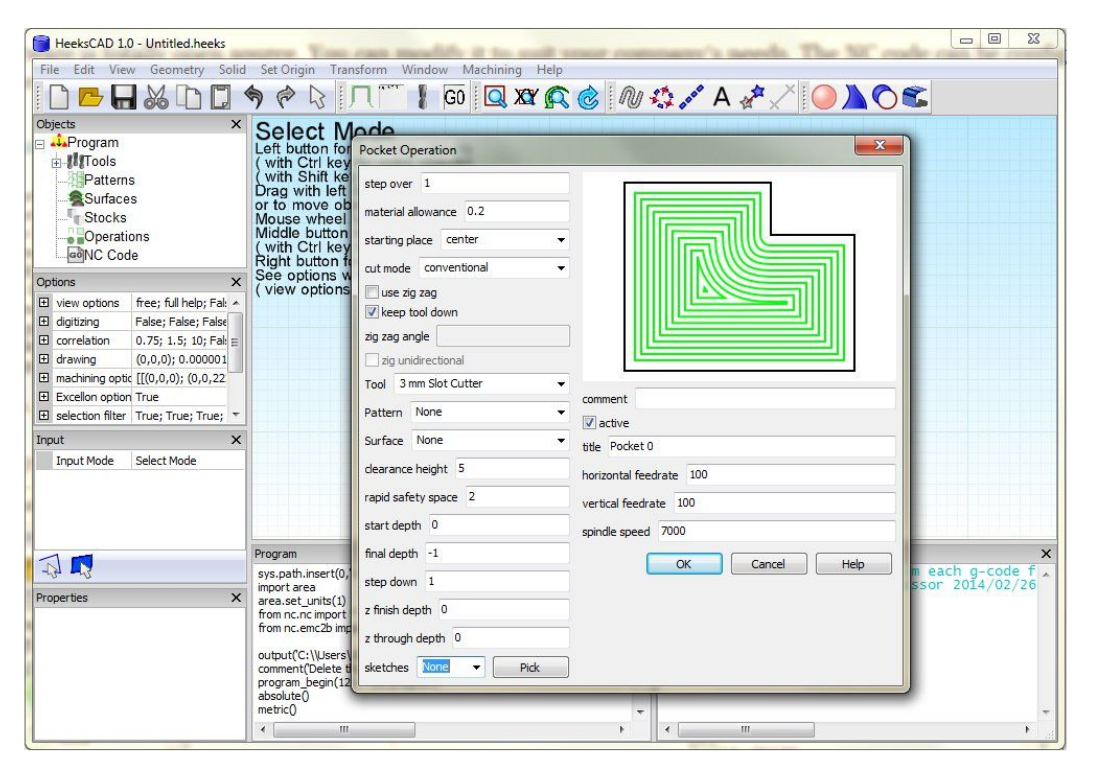
彼のフォークHeeksCADはCAMパートでより精巧であり、モデル/図面に基づいて制御プログラムを作成できます。
プログラム管理
座標表、フライス、または機械の他のツールを直接制御するものは何ですか?

これらは、USBフラッシュドライブとマシンを接続できる専用のDSP CNCコントローラーです。 または、これらは電気ドライブとスピンドルを制御するためのシングルボードコンピューター(Raspberry PI、BeagleBoard)用の拡張カードです。 または、LPTポートを備えた通常のパーソナルコンピューター、またはマシンエレクトロニクスとのインターフェイス用のPCI / PCIe拡張カードです。
このレポートの主人公はパソコンです。 マシンを制御できるため、オープンソースプログラムLinuxCNCを使用してgコードを解釈できます。

ソフトウェアは、リアルタイムのLinuxカーネルで実行されます。 Raspberry PIシングルボードコンピューターの場合、BeagleBoard Blackは既製のisoイメージとしてARMのフォークMachinekitを使用します。 9ドルのシングルボードチップ用のMachinekitビルドがあります。
LinuxCNCはコンストラクターであり、その構成に基づいて、ほぼすべての構成を構築できます。 このプログラムは、ホビマシンと巨大な生産CNCの両方を管理します。 産業用CNCの電子機器の近代化と、新しく設計された機械の両方で使用されます。

一部のコンポーネントはリアルタイムプロセスで動作し、それほど重要ではない部分は予測できない遅延のある環境で動作します。 LinuxCNCのイベントに対する反応の内部ロジックを拡張するには、LDチャート、さらにはシェルスクリプトまたはコンソールプログラムを使用できます。
JavaとGroovyからマシンを制御します
GUIコンポーネントの代わりに、CNCを制御し、通常のソフトウェア開発テクノロジーを使用して外部API経由でインタープリターにコマンドを転送しようとします。 このアイデアに興味があるすべての人は、githubでPoC Apache Camelコンポーネントとcamel-gcode JVMのライブラリを見つけることができます。
Javaに基づく「モノのインターネット」には多くのソリューションがあり、多くの場合、これらはIoTゲートウェイ用のサーバーです。 LinuxCNC上のマシン制御を、インターネットアクセスを使用した複雑な「クラウド」自動化シナリオに統合できるようになりました。 Eclipse Kura、Apache Camelを使用し、このコンストラクターを使用して数百の既製コンポーネントの実用的なソリューションを組み立てることは難しくありません。 カメラまたはネットワーク経由で画像をキャプチャするツールがあるため、マシンビジョンライブラリを統合し、認識コンポーネントを追加できます。
マシンを制御するコマンドを送信できるAPIを使用した小さなJavaの例から始めましょう。 内部では、ライブラリはtelnetコマンドをLinuxCNC / Machinekitからlinuxcncrshプロセスに送信します。
//maven dependency com.github.igor-suhorukov:camel-gcode:0.1 import com.github.igorsuhorukov.gcode.GCodeClient; public class Gcode { public static void main(String[] args) throws Exception { String hostname = "beaglebone.local"; int port = 5007; try (GCodeClient gCodeClient = new GCodeClient(hostname, port)) { System.out.println(gCodeClient.login("EMC", "JVM", "1.0")); gCodeClient.sendCommand("set mode manual"); gCodeClient.sendCommand("set estop off"); gCodeClient.sendCommand("set machine on"); for (int axis = 0; axis < 4; axis++) gCodeClient.sendCommand("set home " + axis); System.out.println(gCodeClient.sendCommand("get abs_act_pos")); gCodeClient.sendCommand("set mode mdi"); gCodeClient.sendCommand("set mdi g0 x3 y4"); gCodeClient.sendCommand("set mdi g0 x5 y2"); } } }
この例では、マシンのポータルをアイドル時に最大速度で移動し、最初に座標(3; 4)に移動し、次に(5; 2)に移動します。
次のGroovyのサンプルプログラムは、Apache Camelフレームワークとcom.github.igor-suhorukovマシンにコマンドを送信するためのコンポーネントに基づいています。camel-gcode
@Grab('com.github.igor-suhorukov:camel-gcode:0.1') @Grab('org.apache.camel:camel-groovy:2.18.0') @Grab('org.apache.camel:camel-core:2.18.0') @Grab('org.apache.camel:camel-jetty:2.18.0') @Grab('org.slf4j:slf4j-simple:1.6.6') import org.apache.camel.builder.RouteBuilder import org.apache.camel.impl.DefaultCamelContext import com.github.igorsuhorukov.smreed.dropship.MavenClassLoader def camelContext = new DefaultCamelContext() camelContext.setName("I'll be back") camelContext.addRoutes(new RouteBuilder() { def void configure() { from('jetty:http://0.0.0.0:9090/moveTo').routeId('CamelCNC') .process{ it.in.body = ("set mdi g0 x${Math.round(Math.random()*10)} y${Math.round(Math.random()*10)} z1") } .to('gcode:?host=beaglebone.local&port=5007&autoHomeAxisCount=4') } }) addShutdownHook{ camelContext.stop() } camelContext.start() def HawtIo = MavenClassLoader.usingCentralRepo() .forMavenCoordinates('io.hawt:hawtio-app:2.0.0').loadClass('io.hawt.app.App') Thread.currentThread().setContextClassLoader(HawtIo.getClassLoader()) HawtIo.main('--port','10090')
java -jar groovy-grape-aether-2.4.5.4.jar CamelCNC.groovyを使用して例を実行できます
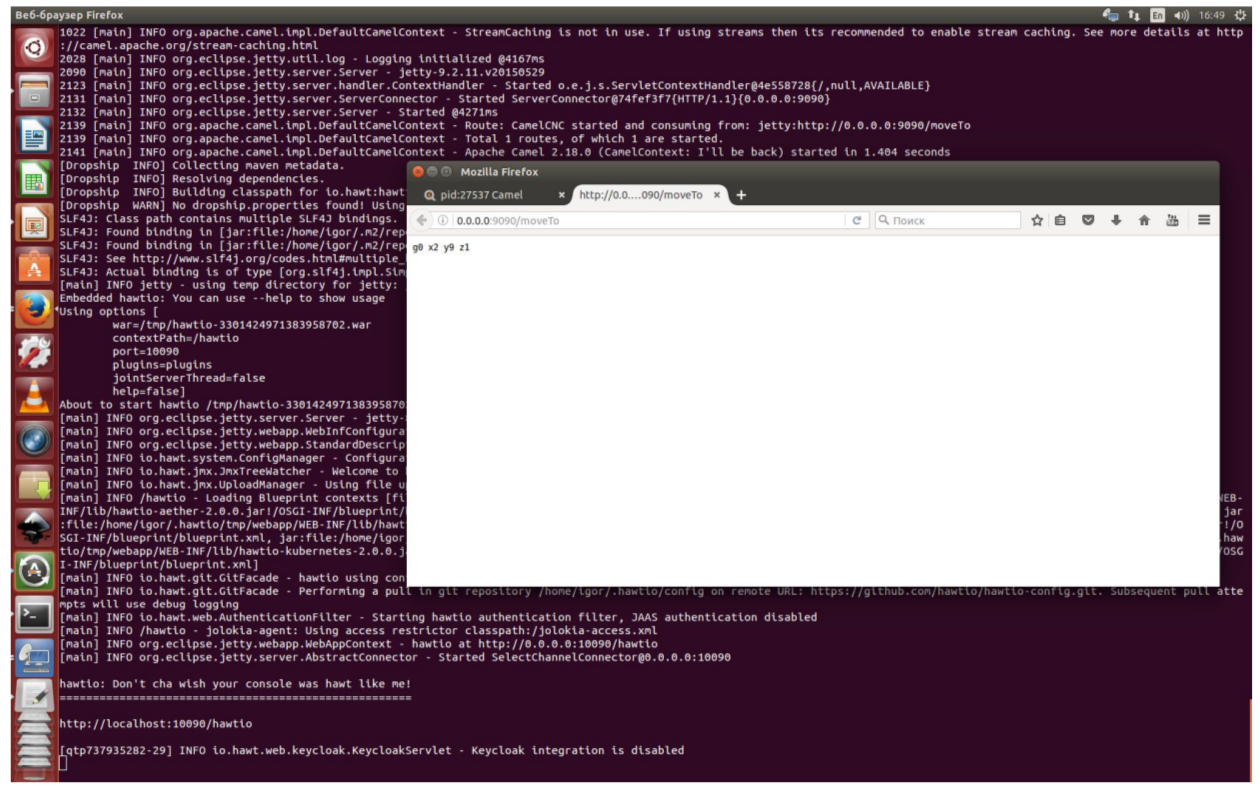
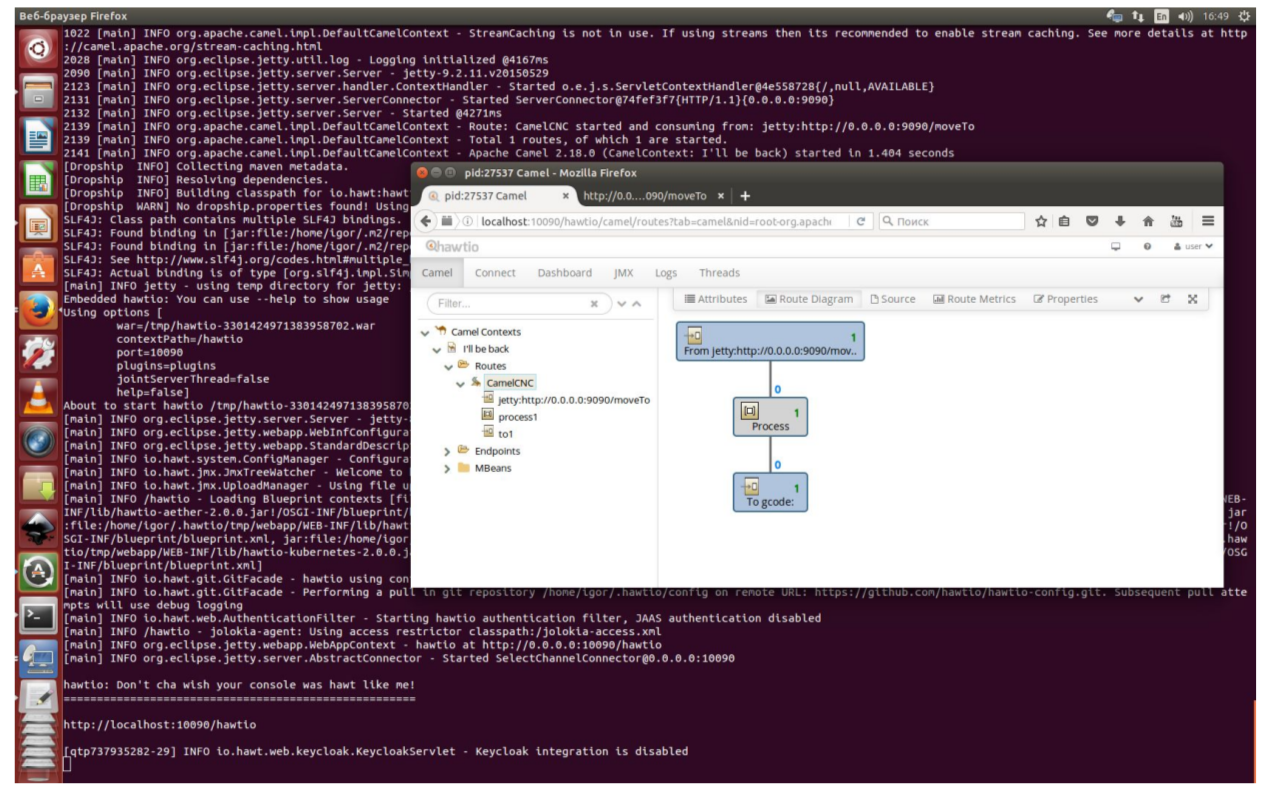
この例では、Groovyアプリケーションはjetty、gcodeコンポーネントを接続し、groovy DSLキャメル上にルートを形成し、Webコンソールをダウンロードして起動してHawtIoを監視します。 HOST:9090 / moveToへの各HTTPリクエストに対して、XおよびY軸に沿ったランダムな座標で新しいコマンドが作成され、LinuxCNCとマシンに送信され、生成されたコマンドがHTTPレスポンスとしてクライアントに返されます。 WebコンソールはHOSTでリッスンしています:10090 / hawtio
Apache Camel、Groovy、およびHawtIoの魔法により、非常に複雑なことは簡単です。
美しい遠く...
私たちは未来について幸運を語ることができます。
自動化でき、経済的に実行可能なものはすべて自動化される傾向があります。 先日、中国でFoxconnについてのニュースがあり、4万台の自動機械が生産され、企業の雇用が減少しました。 彼らは自動機械の詳細の大部分を自分で行い、電子機器を制御します。
私はノストラダムスではありませんが、自動化により将来の仕事がなくなることは明らかです。 また、自動化の必要性は時間とともに増加することも明らかです。 そして、これらの技術に精通している人々は労働市場でさらに需要がありますが、特定の時点まで...そして、CNCでの個人生産はすべてのワークショップに浸透します。
正確に将来はどうなりますか?
人間のロボットは破壊または破壊されますか?

または、人々もロボットを制御します。
今日はすべて私たちにかかっています!!!
結論
私たちが手動で行うことの多くや、そのような繰り返し作業は、多くの場合自動化できます。 この場合、モデルを作成することから始める必要があります。 次のステップは、このモデルをマシンの制御プログラムに変えることです。 これらのコマンドは特定のCNCメカニズムによって実行され、自動化するのが理にかなっている生産プロセスのすべてを自動化する必要があります。 マシンビジョン技術とフィードバックセンサーを含む使用。 コンピュータとマシンの間でUSBフラッシュドライブを使用して実行する価値はありません。ネットワーク経由でコマンドを転送する必要があります。 マシンにすべての仕事をさせてください。 しかし、CNCがから2つにならないようにするには、技術を学び、プロセスの詳細を理解する必要があります。 それ以外の場合は、常に最初に望んでいたものを理解し、結果として得られる人とリソースを共有する必要があります。
参照資料
ソフトウェアが合法的に無料で使用できる場合、CADがオープンソース製品であるかどうかは関係ありません。DIHALTの 出版物とビデオコースを 読んでください
- LinuxCNC
- マシンキット
- Freecad
- Heekscad
- Gcodedetools
- LinuxCNC telnetプロトコル
- LinuxCNCのGコード
- githubのcamel-gcode
- アパッチキャメル
- camel-gcode Groovyの例
ソフトウェアが合法的に無料で使用できる場合、CADがオープンソース製品であるかどうかは関係ありません。DIHALTの 出版物とビデオコースを 読んでください