In the framework of the Skolkovo Robotics & AI forum, on April 16, 2019, Moscow hosted the first meeting in Russia on the Robot Operating System, a worldwide popular software framework that implements the basic algorithms for building complex robots. The event gave such a powerful impetus to the development of all teams. We plunged into what we love the most - development! Therefore, only now we have found the time to consolidate the unique materials of our meeting, transmitted by the speakers for publication.
Among the visitors of the largest robotics forum in Russia there were more than 150 engineers who either already use ROS or just plan to use it in their projects. This is a good result for the first meeting of a small community of Russian ROS developers. We strive to become part of the global movement - and hundreds of participants are already gathering similar events abroad. The second Russian ROS Meetup will be held on November 30, 2019 .
Thanks again to everyone who came and spent their time on a detailed study of reports and tricky questions. All this showed that there is great interest on the part of the community in the development of ROS, and regular work needs to be continued to conduct such meetings. We grow when we share best practices and improve one of the most common robot development tools in the world - Robot Operating System.
Our speakers were practice developers with topics from their real experiences. Therefore, the materials presented in this publication reflect the possibilities of using ROS in existing and ongoing projects.
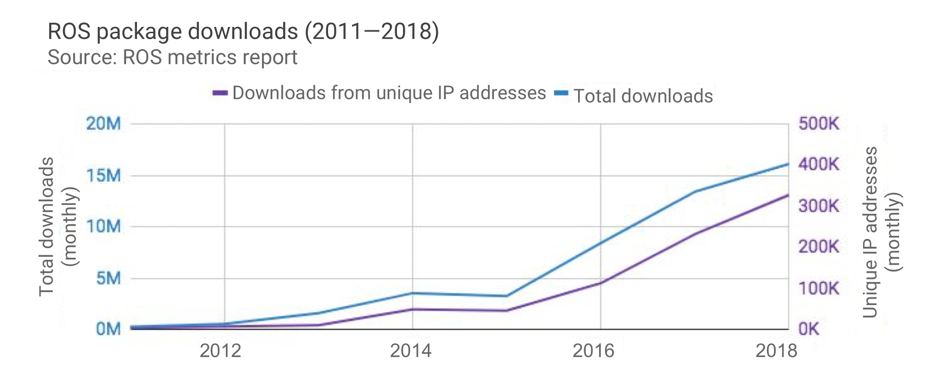
The global ROS community is currently the largest and most open robotic community in the world. The number of ROS downloads has increased almost 6 times since 2014! Obviously, this is the most important tool for those who create robots, so we at the Sberbank Robotics Laboratory support everyone who shares ROS values with us and wants to exchange experiences.
If you are developing new algorithms for robots, then writing a package for ROS is a good solution for integrating them into existing robots and demonstrating to the world.
If you are just starting your journey in robotics, then learning ROS will help you master modern technologies and integrate into the community.
The first ROS Meetup was full of interesting reports. But since not everyone was able to attend the event in Moscow, we post videos and presentation slides for you:
Introduction to ROS. Ideology and current status.
Alexey Burkov, Sberbank Robotics Laboratory.
The report talks about the advent of ROS, its concepts and the people who developed it, as well as the current state of the framework in the global community.
Link to presentation slides.
Experience of using ROS in competitive robotics using the example of Eurobot.
Alexey Postnikov, Sberbank Robotics Laboratory.
The report discusses the robot localization system using Aruco markers using ROS.
Link to presentation slides.
By the way, you can take part in Eurobot competitions by joining the SetUp team supported by the Sberbank Robotics Laboratory - this is a great way to learn robotics and ROS, and put your skills into practice. To participate, write a letter to robotics@sberbank.ru.
SLAM and laser lidar navigation.
Alexey Burkov, Sberbank Robotics Laboratory.
The story of how we used ROS to navigate a courier robot using SLAM and a path planner covered the following topics:
- Building a room map and robot localization using the Gmapping algorithm.
- Localization of the robot on the map by the AMCL algorithm.
- Robot navigation through MoveBase and DWA.
Link to presentation slides.
You can get an internship at the Sberbank Robotics Laboratory on the topics of courier and ROS, for this, write a letter to robotics@sberbank.ru.
A robot path planner taking into account a given map and dynamic obstacles using the example of Eurobot.
Alexander Gamayunov, Sberbank Robotics Laboratory.
The history of creating your own route planner based on A *, T *, Costmap Server, Global Planner, STM32 Driver and the Ramer-Douglas-Pecker algorithm for participating in international Eurobot competitions.
Link to presentation slides.
Experience of using ROS in the control system of an autonomous underwater uninhabited vehicle “Cousteau 2”
Timur Akhtyamov, UCM Hydronautics.
Underwater vehicle simulation. Use of state machines SMACH. ROS wrapper serial. The trigger for QR codes. Roslaunch API to start and stop launch files from Python code. Autostart nodes at OS startup.
Link to presentation slides.
BelAZ at ROS as we at VIST Group create mining solutions.
Elizaveta Shpiev, VIST Group.
The story of how the VIST Group uses ROS to create an intelligent career.
Link to presentation slides.
Testing code in ROS how to build an unmanned car and not break anything.
Oleg Shipitko, Visillect.
Story of using Google Test (C ++), Unittest (Python) and Rostest for testing in ROS.
Link to presentation slides.
Computer vision in robots is the capture of things by a manipulator according to data from an RGBD camera.
Alexander Syomochkin, Sberbank Robotics Laboratory.
About how to use the RGBD camera to capture objects with a robot with a manipulator.
Link to presentation slides.
The unification of the world’s unified ROS development.
Konstantin Konogorsky, VIST Group.
The continuation of the story of the intellectual career of VIST Group, or how to combine the inextricable.
Link to presentation slides.
ROS Docker Launches a virtual ROS image on a Linux computer.
Alexander Syomochkin, Sberbank Robotics Laboratory.
Report on using Docker to create and run a virtual ROS image on Linux.
Link to presentation slides.
What devices are listening to and what they are talking about.
Alexander Menshikov, Sberbank Robotics Laboratory.
Using ROS to create voice communication services.
Link to presentation slides.
The last ROS meeting gave the participants a lot of positive emotions and interesting reports on the use of ROS in modern robotics in Russia, and we hope to further develop the Russian ROS community with your help. Therefore, we invite everyone to make a presentation at the next ROS meetup on November 30, 2019 in Moscow.
forms.gle/G3ggYcvFLfuJw1ur6
In addition to ROS Meetup, we also conduct ROS internships at the Sberbank Robotics Laboratory for our projects, more details can be found on the link .
If you want to know more about our work or the development directions of modern robotics, we recommend that you carefully read the annual analytical review of the global robotics market .
It seems to us that the first experience of gathering the community was correct and positive - we will continue this. And the next ROS meetup is scheduled for November 30, 2019 !
You can take part as a listener by filling out an application and waiting for confirmation of your participation by e-mail.
