みなさんこんにちは。 当然のことながら、自動操縦は管理上の決定を下すだけでなく、これらの決定に従うように車を強制する必要もあります。 今日は、非常に手頃な価格の手段を使用して、完全に電子的なステアリング(ステアバイワイヤ)で通常の車を改造する方法を説明します。 車自体は開発に実際には必要ではなく、ほとんどの機能は自宅やオフィスで快適にデバッグできることがわかりました。 エレクトロニクスホビーショップの有名なコンポーネントを主演。
電子制御システムに必要なものは何ですか? 車輪を回転させることができるサーボ、およびサーボを制御するコントローラー。 突然、これはすべてほとんどの近代的な車にすでに搭載されており、「パワーステアリング」と呼ばれています。 従来の純粋な機械式(通常は油圧式)アンプは市場から急速に姿を消しつつあり、電子制御ユニット(ECU)を備えたノードに取って代わりました。 そのため、タスクはすぐに簡素化されます。必要なコマンドをサーボドライブに発行するように、既存のアンプECUを「説得」することができます。
2015年モデル以降のKIA Cee'dの改良に非常に便利であることが判明しました(KIA / Hyundaiのコプラットフォームはほぼ同様です)。 いくつかの要因が同時に生じました。
- パワーステアリングは完全に電動式であり、油圧装置に大騒ぎすることはありません。分解にかかる費用は(比較的)少額です。 必要なすべての配線が引き出され、簡単にアクセスできます。
- アンプはステアリングコラムと統合されているため、車で簡単にアクセスでき、追加の電子機器は温室の状態でキャビンに残ります(アンプがステアリングラックに統合されている場合とは異なります)。
- 非常に重要です-同様のKIAソウルの洗練の成功例があります。 American PolySyncは 、Soulをドローン向けの完全なドライブバイワイヤプラットフォームへのアップグレードを開発しています。GitHubで 多くの有用なものを見ることができます。
そのため、ステアリングコラムアセンブリの廃棄時に受け取りました。

スピンさせます。 これを行うには、コントロールユニットが
- 彼は走行中のエンジンを搭載した車に乗っています。
- ドライバーは、ハンドルに回転力を加えます。
順番に行きましょう。
車のシミュレーション
アンプの電子制御ユニット(ECU)と車の他の部分との間のインターフェースを理解する必要があります。 電気回路をグーグルで見ると、画像が表示されます。

この図は、インターフェイスが物理的に非常に単純であることを示しています。
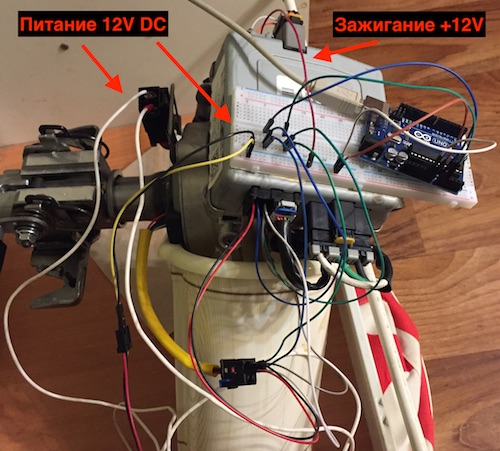
- E29コネクタ経由の電源(DC12V)。
- コネクタM46を介した点火オン信号(12V)。
- コネクタM46経由のCANデータバスも。
同じサイトでコネクタの外観とピン配置を確認します。
電源とイグニッションを使用すると、すべてが簡単になり、従来のコンピューターの電源から12Vを取得できます。 ただし、電源と点火を供給するだけでは、アンプは完全にはオンにならず、増幅しません。 さらに、車の他のブロックからの情報が必要です:エンジンが作動しているかどうか(オフになったときにバッテリーエネルギーを無駄にしないように)、現在の速度(ハンドルをスピードで「重く」するため)、おそらく何か他のもの。
現代の自動車の電子ユニット間のデータ交換は、 CAN(コントローラーエリアネットワーク)バスを介して行われます。 これは、各ブロックがそのデータを公開できるツイストペアケーブル上のブロードキャスト(パケットには宛先アドレスがありません)LANです。 各データ型には独自の識別子があります。 たとえば、この例では、パワーステアリングはID 0x2B0のステアリング角度の値を送信します。 パワーウィンドウコントローラーなどのセカンダリユニットが重要なコンポーネント間の交換を妨害しないように、多くの場合、物理的に分離されたバスがいくつかあります。 Cee'dは、C-CANとB-CANの2つのバスを使用します(「データチャネル情報」セクションの図を参照)。 C-CANでは、ほぼすべてのブロックが「ハング」し、動作します。
CANバスアダプターの選択
まず第一に、コンピューター用のCANインターフェースが必要です。 可能なソリューションの詳細な概要はここで入手できます 。 たとえば 、価格は数十ドルから数百ドルの範囲です。 デバイスごとに、比較的手頃な価格があります。
- aliexpressで組み立てられたアダプタ。 私はそれらを試したことはありませんが、多くの欠陥があり、ソフトウェアはWindowsでしか見えないという噂があります。
- MCP2515 / MCP2551のArduinoシールドは、主にArduinoをテーマにしたストアからデザインクローンを発見しました。 ただし、このようなシールドをArduinoと組み合わせて(必要な速度で動作させることができませんでした)、Raspberry Piと組み合わせる必要があります。 以下の付録には、詳細な手順が含まれています 。
- Artemka86によって開発されたUSBアダプターCANHacker Baby 。 開発者からの優れた直接サポートを備えたaliexpressオプションと比較して好意的です(個人的にテストされたArtyomは、魂で問題にアプローチします)。 また、幅広いソフトウェアと互換性のある標準LAWICELプロトコルのサポートもプラスです。
たくさんの異なるソフトウェアもあります( ここでもう一度レビューします )。 最も簡単なオプションは、Volkswagenのエンジニアのおかげで、 SocketCANの can-utils
を使用した Linuxです。 標準化におけるSocketCANの大きな利点は、LAWICELプロトコル(pdf)をサポートする USBデバイスがシステムから通常のネットワークインターフェイスとして認識されることです 。 したがって、特定のデバイスのベンダー固有のソフトウェアへのバインドを回避します。 CANHackerの現在のバージョンには、USBを操作するための標準のcan-utilsとのわずかな非互換性があるため、ここからパッチバージョンを取得します 。 CANシールド付きRaspberry Piは、Raspbian OSのcan-utilsストックパッケージで問題なく動作します。
バス接続、パケット記録
スタンド上の個々のノードに接続することで、すべてが簡単になります。アダプターのCAN-High接点とカーユニットのCAN-High、CAN-Low-CAN-Lowを接続します。 標準によれば、CAN-HighとCAN-Lowの間にそれぞれ120Ωの終端抵抗が2つあるはずです。実際には、すべてが通常かなり広い範囲の抵抗で動作します。たとえば、110Ωの抵抗があります。
車には終端抵抗は必要ありません(バス自体を機能させるために既に存在しています)。 車のモデルによっては、バスの配線に物理的にアクセスする必要がある場合があります。 最も便利なオプションはOBD-II(オンボード診断)コネクタです。2001-2004年の初めからヨーロッパで製造されたすべての車に必要であり、ステアリングホイールから60 cm以内です。 Cee'dの左側には、ハンドルの下のヒューズボックスのプラスチックカバーの後ろにコネクタがあります。

OBD-IIピン配置は標準化されており、CANバス(6ピンのCANH、14ピンのCANL)が含まれています。 幸運なことに、韓国人は抵抗が最も少ない道をたどり、すべての重要なノードがぶら下がっているC-CANを診断コネクタに直接引き出しました。

その結果、車内で何かを分解することなく、Cee'dのすべての内部トラフィックを聞くことができます。 車があなたのものではなく、友人があなたを混乱させるとき-大きなプラス。 しかし、そのような景品はどこにもありません。 たとえば、フォルクスワーゲンの場合、サービスCANはOBDゲートウェイから分離されているため、次のように接続する必要があります。

すべての連絡先を接続したら、ネットワークインターフェイスを上げます。
$ sudo slcand -o -c -s6 -S 115200 ttyACM0 slcan0 && sleep 1 && sudo ifconfig slcan0 up
ネットワークが機能し、データが受信されていることを確認します(イグニッションをオンにします)。
$ cansniffer slcan0
そして最後に、すべてがうまくいけば、ログを書くことができます:
$ candump -L slcan0 > real-car-can-log.txt
ここで、エンジンを起動する必要があります。なぜなら、 エンジンが稼働しているときのみパワーステアリングが実際のゲインでオンになり、スタンドで強化する必要があります。
スタンドでバス録音を再生する
車から記録されたログを使用して、スタンドに戻り、私たちの孤独なアンプを欺くために進むことができます。 まず、車には専用のアンプがあり、CANバスにもデータを送信することを忘れないでください。これらのパケットもログに記録されています。 競合を避けるためにそれらをフィルタリングします。 私たちはスタンドのアンプに接続されており、それが与えるものを見ていきます:
$ $ candump slcan0 slcan0 2B0 [5] 00 00 00 00 00 slcan0 2B0 [5] FF 7F FF 06 F1 slcan0 2B0 [5] FF 7F FF 06 C2 slcan0 2B0 [5] FF 7F FF 06 D3 slcan0 2B0 [5] FF 7F FF 06 A4 slcan0 2B0 [5] FF 7F FF 06 B5 slcan0 2B0 [5] FF 7F FF 06 86 slcan0 2B0 [5] FF 7F FF 06 97 slcan0 2B0 [5] FF 7F FF 06 68 slcan0 5E4 [3] 00 00 00 slcan0 2B0 [5] FF 7F FF 06 79 slcan0 2B0 [5] FF 7F FF 06 4A ....
パケット2B0
(現在のステアリング角度)と、それほど頻繁ではないが、 5E4
(アンプの一般的なステータス)が送信されることが2B0
ます。 一般ログからそれらをフィルタリングします。
$ cat real-car-can-log.txt | grep -v ' 2B0' | grep -v ' 5E4 ' > can-log-no-steering.txt
フィルタリングされたログは、再生のために送信できます。
% sudo ifconfig slcan0 txqueuelen 1000 $ canplayer -I can-log-no-steering.txt
すべてが正常に機能した場合、アンプは機能し、ステアリングシャフトを手で回すのがはるかに簡単になります。 そのため、ノードを通常モードで動作するように強制し、ステアリングホイールの操作のシミュレーションに進むことができます。
ステアリングエミュレーション
ステアリングシャフトのトルクと回転角は、内蔵センサーユニットによって測定され、そこからアンプコントロールユニットへの配線ハーネスがあります。

制御ユニットはセンサーの信号を処理し、サーボドライブにコマンドを発行して、ステアリングシャフトを回すための追加の努力を生み出します。
センサー信号形式の確認
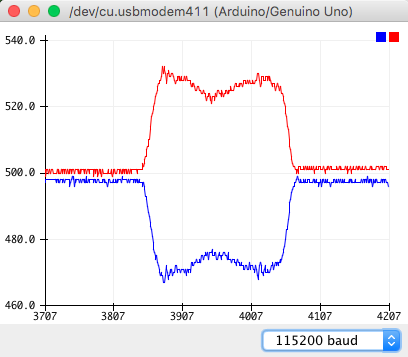
PolySyncによると 、Cee'dと共通のプラットフォームを共有するSoulには、2つのアナログトルクセンサーがあります。 各信号は、ベース2.5VからのDC電圧レベルの偏差であり、バンドル内のワイヤは緑と青です。 同じことを確認してください。
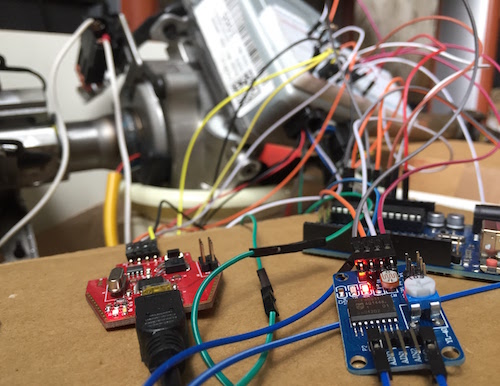
- コンピューターのコネクターを開き、必要な接点をブレッドボードを通して転送し、arduinoアナログ入力を起動します。
- 電圧を測定してターミナルに出力するサイクルで、 スケッチを読み込みます。
- Arduino IDEでシリアルプロッターを起動し、ステアリングシャフトを回転させます。 結果をグラフで見ると、スキームはSoulと一致しています。
- 節約された時間で喜ぶ。
センサー信号エミュレーション
センサー信号をエミュレートします。 これを行うには、モジュールをセンサーとコンピューターの間の開回路に置き、センサーからの実際の信号をブロードキャストし、コマンドで固定レベルにシフトします(ステアリングコラムに加えられる力を示します)。 1つのArduinoのパワーでは、これは機能しません。定電圧を生成できる本格的なデジタル-アナログコンバーターはありません。 arduinoアナログ入力も私たちにはあまり適していません-最大6つのピンがありますが、コントローラーにはADCチャンネルが1つしかなく、ピン間の切り替えにはかなりの時間がかかります。
Arduinoに外部DAC / ADCを追加する必要があります。 PCF8591チップに基づいたYL-40モジュール( pdfの説明 )に出会いました。各モジュールには、4チャネルの8ビットADCと1つの8ビットDACがあります。 モジュールは、I2Cプロトコルを介してarduinoと通信できます 。 それには少し文字通りのドーピングが必要です(文字通り):中国の同志はボードにDACの出力の電圧を示すLEDを置きます-それは切断されなければなりません。 そうしないと、ダイオードを流れる電流により、DACが(標準の5Vではなく)4.2V以上の出力電圧を上げることができなくなります。 ボードの背面から抵抗R4を取り出すことにより、ダイオードを切断します。

また、おもちゃの負荷(サーミスタ、フォトレジスタ、その他)が入力にはんだ付けされ、それらを切断し、ジャンパを取り外して干渉しないようにします。

arduinoへのインターフェースには微妙な違いがあります-2つのDACチャネル、それぞれ2つのモジュールが必要ですが、それらは同じI2Cアドレスを持っています(チップに配線されています)。 このチップを使用すると、I2Cアドレスを変更して、特定のレッグをグランドではなく+ 5Vにロックできますが、これらのジャンパーはボード上で分離されていません。 はんだ付けの代わりに、arduino上の2つの異なるI2Cライブラリ(標準のWireとSoftI2CMaster )に松葉杖を取りましょう。それぞれにピンのペアがあります。 異なるバスでモジュールを取得すると、競合はなくなります。
残りは簡単です-モジュールをセンサーから回路遮断に入れ、arduinoに接続し、 スケッチを読み込みます。 接続のピン配列の詳細は、スケッチのコメントにあります。 アセンブリにすべてを含めることは残っていますが、ここでの順序は重要です。
- arduinoをオンにして、シリアルモニターを開きます。 停止または中断ではなく、最初にarduinoを開始することが重要です。 そうしないと、DACの出力の電圧がリセットされ、アンプECUがセンサーからの信号エラーを検出し、セーフモードになり、すべてを再起動する必要があります。
- アンプの電源を入れ、イグニッションを接続します。
- CANバスログの再生を開始します。
- これで、シリアルモニターを介したコマンド
l
およびr
により、アンプはステアリングシャフトを回転させます。 勝利が宣言されます。
今日では、すべてがソフトウェアを完成させます(CANバスとの統合、そこから現在の回転角を読み取り、外部コントローラーがステアリングホイールの固定回転角を設定し、システムがそれに耐えられるようにトルクを動的に制御します)、車での作業(抵抗をシミュレートすることはできません)ホイール)。 8ビットDAC / ADCを10または12ビットに置き換えることができます(最初に手に入れたものを取りました)。 タキシングニューラルネットワークも進行中です。すぐに投稿したいと思っています。
CANの使用および機器のサポートに関する貴重なアドバイスをくださったArtemka86に感謝します。
さらなる没入のためのリソース
- カーハッキング:決定的なソース 。 PooriesのCar Hackingから始めることができます。ここでは、基本が十分に説明されています。 残りも興味深いですが、不正アクセスに焦点を当てています。
- カーハッカーハンドブック:侵入テストのガイド 。 カーハッキングよりも詳細:決定的なソースであり、不正アクセスも強調しています。 トピックの最初の紹介として読んだ場合、大きな部分をスキップするように適応する必要があります。
- カーハッキング101:取引ツール 、 MCDソフトウェア -ツールレビュー。 私の意見では基本的に面白くないエキゾチックです。
- Open Source Car Controlは、KIA Soulが開発中のオープンプラットフォームです。 彼らは、マシンのハードウェアの改善(主にブレーキ用-追加のブレーキドライブの取り付け、ブレーキ油圧の変更など)を含め、完全な決定(ステアリングホイール、アクセル、ブレーキ)を行います。 まだリリースはありませんでしたが、多くのものがすでに見張られています。
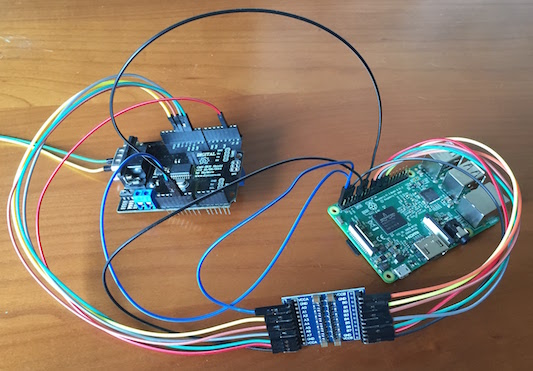
ボーナス Raspberry PiとArduino CANシールドの組み合わせ
まず第一に、注意、 CANシールドとラズベリーパイは直接接続できません 。それらは電圧に互換性がありません。 Arduino UNO互換ボードでは、ロジック電圧は5Vであり、ラズベリーパイでは3.3Vのみであるため、直接接続では関係するピンのみが焼けます。
必要なもの:
- Raspberry Pi(バージョン3Bでテスト済み)。
- MCP2515 / MCP2551のArduino CANシールド。
- 5チャネル以上のロジックレベルコンバーター(2〜4チャネルが可能ですが、より多くの接続が必要になります)。 これに出会った
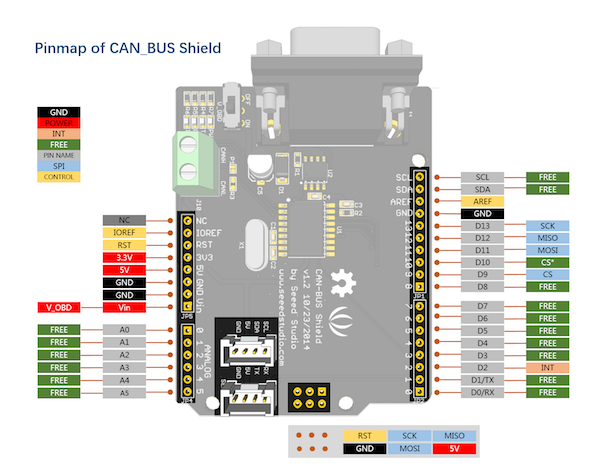
CANシールド、 SPIデータインターフェイス接続 (4ピン:MOSI、MISO、SCLK、CS)および割り込み信号の1ピンで電力(5V)を取得する必要があります。 電力以外はすべてレベルコンバーターを通過し、レベルコンバーターも電源を入れる必要があります。
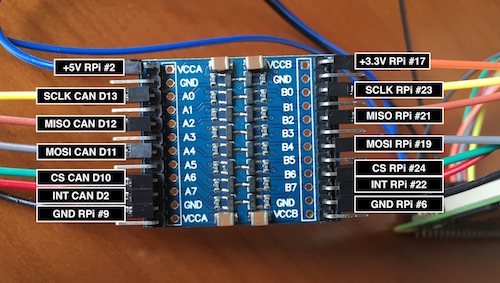
図では、必要なピンを探しています。
ラズベリーパイ:

CANシールド:
結果が得られます。
- raspberry pi 19、21、23、24(MOSI、MISO、SCLK、CS)のSPIは、CANシールドのD11、D12、D13、D9(または一部のバージョンのD10)に対応しています。
- シールド上のD2からの中断は、任意のGPIOピンラズベリーで行うことができます。ピン22(GPIO 25)があります。 設定中にソフトウェアでピン番号を指定します。
コンバーターを介して接続し、コンバーターの両側で目的の供給電圧を開始すると、この麺がわかります。
5V電源とシールドへの接地を除くすべてがコンバータを通過します。
ソフトウェアの構成に進みます(標準のRaspbian)。
SPIおよびCANモジュールのサポートが含まれています。
/boot/config.txt
追加します
dtparam=spi=on dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=25,spimaxfrequency=1000000 dtoverlay=spi0-hw-cs
ここで、
interrupt=25
は、シールドからの割り込みが巻き付けられるピンを示します。 インデックス付けはGPIOピンに基づいているため、interrupt=25
はGPIO 25であり、すべてのピンのエンドツーエンドのインデックス付けではピン22です。 SPIspimaxfrequency
インターフェースの周波数を指定することも重要です。 デフォルト値-10 MHz-はシールドには高すぎるため、接続できません。
raspberry piを再起動し、シールドへの接続を確認します。
$ dmesg ... [ 12.985754] CAN device driver interface [ 13.014774] mcp251x spi0.0 can0: MCP2515 successfully initialized. ...
can-utils
をインストールします。
$ sudo apt install can-utils
仮想ネットワークインターフェイスを起動します。
$ sudo /sbin/ip link set can0 up type can bitrate 500000 $ sudo ifconfig can0 txqueuelen 1000
2番目のコマンドは、ラズベリーパイを使用して大量のデータを再生する場合、つまり、車に記録された完全なCANバスログがスタンド上の分離ノードで再現される場合に重要です。 バッファを増やすことなく、間隔が短い複数のCANパケットがログに表示され、接続がフリーズすると、ほとんどの場合オーバーフローします。
- 完了、
candump
、cansniffer
などcan-utils
すべてを使用できます。