Support for hardware-specific instructions in .NET Core (now not only SIMD)
Introduction
A few years ago, we decided that it was time to support the SIMD code in .NET . We introduced the System.Numerics
namespace with types Vector2
, Vector3
, Vector4
and Vector<T>
. These types represent a general-purpose API for creating, accessing, and manipulating vector instructions whenever possible. They also provide software compatibility for those cases where the hardware does not support suitable instructions. This allowed, with minimal refactoring, to vectorize a number of algorithms. Be that as it may, the generality of this approach makes it difficult to apply in order to get the full advantage of all available, on modern hardware, vector instructions. In addition, modern hardware provides a number of specialized, non-vector, instructions that can significantly improve performance. In this article, I'll talk about how we circumvented these limitations in .NET Core 3.0.
Note: There is no established term for Intrisics translation yet . At the end of the article there is a vote for the translation option. If we choose a good option, we will change the article
What are the built-in functions
In .NET Core 3.0, we added new functionality called hardware-specific built-in functions (far WF). This functionality provides access to many specific hardware instructions that cannot be simply represented by more general-purpose mechanisms. They differ from existing SIMD instructions in that they do not have a general purpose (new WFs are not cross-platform and their architecture does not provide software compatibility). Instead, they directly provide platform and hardware-specific functionality for .NET developers. Existing SIMD functions, for example, cross-platform, provide software compatibility, and they are slightly abstracted from the underlying hardware. This abstraction can be expensive, in addition, it can prevent the disclosure of some functionality (when, for example, functionality does not exist, or is difficult to emulate on all target platforms).
New built-in functions , and supported types, are located under the System.Runtime.Intrinsics
. For .NET Core 3.0, at the moment, there is one System.Runtime.Intrinsics.X86
. We are working to support built-in functions for other platforms, such as System.Runtime.Intrinsics.Arm
.
Under platform-specific namespaces, WFs are grouped into classes that represent groups of logically integrated hardware instructions (often called instruction set architecture (ISA)). Each class provides an IsSupported
property IsSupported
indicates whether the hardware on which the code is running supports this set of instructions. Further, each such class contains a set of methods mapped to the corresponding set of instructions. Sometimes there is an additional subclass that corresponds to part of the same set of commands, which may be limited (supported) by specific hardware. For example, the Lzcnt
class provides access to instructions for counting leading zeros . He has a subclass called X64
, which contains the form of these instructions used only on machines with 64-bit architecture.
Some of these classes are naturally hierarchical in nature. For example, if Lzcnt.X64.IsSupported
returns true, then Lzcnt.IsSupported
should also return true, since this is an explicit subclass. Or, for example, if Sse2.IsSupported
returns true, then Sse.IsSupported
should return true, because Sse2
explicitly inherits from Sse
. However, it is worth noting that the similarity of class names is not an indicator of their belonging to the same inheritance hierarchy. For example, Bmi2
not inherited from Bmi1
, so the values returned by IsSupported
for these two sets of instructions will be different. The fundamental principle in the development of these classes was the explicit presentation of ISA specifications. SSE2 requires support for SSE1, so the classes that represent them are related by inheritance. At the same time, BMI2 does not require support for BMI1, so we did not use inheritance. The following is an example of the above API.
namespace System.Runtime.Intrinsics.X86 { public abstract class Sse { public static bool IsSupported { get; } public static Vector128<float> Add(Vector128<float> left, Vector128<float> right); // Additional APIs public abstract class X64 { public static bool IsSupported { get; } public static long ConvertToInt64(Vector128<float> value); // Additional APIs } } public abstract class Sse2 : Sse { public static new bool IsSupported { get; } public static Vector128<byte> Add(Vector128<byte> left, Vector128<byte> right); // Additional APIs public new abstract class X64 : Sse.X64 { public static bool IsSupported { get; } public static long ConvertToInt64(Vector128<double> value); // Additional APIs } } }
You can see more in the source code at the following links source.dot.net or dotnet / coreclr on GitHub
IsSupported
checks IsSupported
processed by the JIT compiler as runtime constants (when optimization is enabled), so you do not need cross-compilation to support multiple ISAs, platforms, or architectures. Instead, you just write the code using if
expressions, as a result of which unused code branches (i.e. those branches that are not reachable due to the value of the variable in the conditional statement) will be discarded when the native code is generated.
It is important that the verification of the corresponding IsSupported
precedes the use of the built-in hardware commands. If there is no such check, then code that uses platform-specific commands running on platforms / architectures where these commands are not supported will throw a PlatformNotSupportedException
runtime exception.
What benefits do they provide?
Of course, hardware-specific built-in functions are not for everyone, but they can be used to improve performance in operations loaded with calculations. CoreFX
and ML.NET
use these methods to speed up operations such as copying in memory, finding the index of an element in an array or string, resizing an image, or working with vectors / matrices / tensors. Manual vectorization of some code that turns out to be a bottleneck can also be simpler than it sounds. Vectorization of the code, in fact, is the execution of several operations at a time, in general, using SIMD instructions (one stream of commands, multiple data stream).
Before you decide to vectorize some code, you need to carry out profiling to make sure that this code is really part of the "hot spot" (and, therefore, your optimization will give a significant performance boost). It is also important to carry out profiling at each stage of vectorization, since vectorization of not all code leads to increased productivity.
Vectorization of a simple algorithm
To illustrate the use of built-in functions, we take the algorithm for summing all elements of an array or range. This kind of code is an ideal candidate for vectorization, because at each iteration, the same trivial operation is performed.
An example implementation of such an algorithm may look as follows:
public int Sum(ReadOnlySpan<int> source) { int result = 0; for (int i = 0; i < source.Length; i++) { result += source[i]; } return result; }
This code is quite simple and straightforward, but at the same time slow enough for large input data, as does only one trivial operation per iteration.
BenchmarkDotNet=v0.11.5, OS=Windows 10.0.18362 AMD Ryzen 7 1800X, 1 CPU, 16 logical and 8 physical cores .NET Core SDK=3.0.100-preview9-013775 [Host] : .NET Core 3.0.0-preview9-19410-10 (CoreCLR 4.700.19.40902, CoreFX 4.700.19.40917), 64bit RyuJIT [AttachedDebugger] DefaultJob : .NET Core 3.0.0-preview9-19410-10 (CoreCLR 4.700.19.40902, CoreFX 4.700.19.40917), 64bit RyuJIT
| Method | Count | Mean | Error | Stddev |
|---|---|---|---|---|
| Sum | one | 2.477 ns | 0.0192 ns | 0.0179 ns |
| Sum | 2 | 2.164 ns | 0.0265 ns | 0.0235 ns |
| Sum | four | 3.224 ns | 0.0302 ns | 0.0267 ns |
| Sum | 8 | 4.347 ns | 0.0665 ns | 0.0622 ns |
| Sum | 16 | 8.444 ns | 0.2042 ns | 0.3734 ns |
| Sum | 32 | 13.963 ns | 0.2182 ns | 0.2041 ns |
| Sum | 64 | 50.374 ns | 0.2955 ns | 0.2620 ns |
| Sum | 128 | 60.139 ns | 0.3890 ns | 0.3639 ns |
| Sum | 256 | 106.416 ns | 0.6404 ns | 0.5990 ns |
| Sum | 512 | 291.450 ns | 3.5148 ns | 3.2878 ns |
| Sum | 1024 | 574.243 ns | 9.5851 ns | 8.4970 ns |
| Sum | 2048 | 1 137.819 ns | 5.9363 ns | 5.5529 ns |
| Sum | 4096 | 2 228.341 ns | 22.8882 ns | 21.4097 ns |
| Sum | 8192 | 2 973.040 ns | 14.2863 ns | 12.6644 ns |
| Sum | 16384 | 5 883.504 ns | 15.9619 ns | 14.9308 ns |
| Sum | 32768 | 11 699.237 ns | 104.0970 ns | 97.3724 ns |
Increase Productivity Through Deployment Cycles
Modern processors have various options for improving code performance. For single-threaded applications, one such option is to perform several primitive operations in a single processor cycle.
Most modern processors can perform four addition operations in one clock cycle (under optimal conditions), as a result of which, with the correct "layout" of the code, you can sometimes improve performance, even in a single-threaded implementation.
Although JIT can perform loop unrolling on its own, JIT is conservative in making this kind of decision, due to the size of the generated code. Therefore, it may be advantageous to deploy a loop, in code, manually.
You can expand the loop in the code above as follows:
public unsafe int SumUnrolled(ReadOnlySpan<int> source) { int result = 0; int i = 0; int lastBlockIndex = source.Length - (source.Length % 4); // Pin source so we can elide the bounds checks fixed (int* pSource = source) { while (i < lastBlockIndex) { result += pSource[i + 0]; result += pSource[i + 1]; result += pSource[i + 2]; result += pSource[i + 3]; i += 4; } while (i < source.Length) { result += pSource[i]; i += 1; } } return result; }
This code is a bit more complicated, but it makes better use of the hardware features.
For really small loops, this code runs a little slower. But this trend is already changing for input data of eight elements, after which the execution speed starts to increase (the execution time of the optimized code, for 32 thousand elements, is 26% less than the time of the original version). It is worth noting that such optimization does not always increase productivity. For example, when working with collections with elements of type float
"deployed" version of the algorithm has almost the same speed as the original one. Therefore, it is very important to carry out profiling.
| Method | Count | Mean | Error | Stddev |
|---|---|---|---|---|
| Sumunrolled | one | 2.922 ns | 0.0651 ns | 0.0609 ns |
| Sumunrolled | 2 | 3.576 ns | 0.0116 ns | 0.0109 ns |
| Sumunrolled | four | 3.708 ns | 0.0157 ns | 0.0139 ns |
| Sumunrolled | 8 | 4.832 ns | 0.0486 ns | 0.0454 ns |
| Sumunrolled | 16 | 7.490 ns | 0.1131 ns | 0.1058 ns |
| Sumunrolled | 32 | 11.277 ns | 0.0910 ns | 0.0851 ns |
| Sumunrolled | 64 | 19.761 ns | 0.2016 ns | 0.1885 ns |
| Sumunrolled | 128 | 36.639 ns | 0.3043 ns | 0.2847 ns |
| Sumunrolled | 256 | 77.969 ns | 0.8409 ns | 0.7866 ns |
| Sumunrolled | 512 | 146.357 ns | 1.3209 ns | 1.2356 ns |
| Sumunrolled | 1024 | 287.354 ns | 0.9223 ns | 0.8627 ns |
| Sumunrolled | 2048 | 566.405 ns | 4.0155 ns | 3.5596 ns |
| Sumunrolled | 4096 | 1 131.016 ns | 7.3601 ns | 6.5246 ns |
| Sumunrolled | 8192 | 2 259.836 ns | 8.6539 ns | 8.0949 ns |
| Sumunrolled | 16384 | 4 501.295 ns | 6.4186 ns | 6.0040 ns |
| Sumunrolled | 32768 | 8 979.690 ns | 19.5265 ns | 18.2651 ns |

Increase productivity through loop vectorization
Be that as it may, but we can still slightly optimize this code. SIMD instructions are another option provided by modern processors to improve performance. Using a single instruction, they allow you to perform several operations in a single clock cycle. This may be better than direct loop unfolding, because, in fact, the same thing is done, but with a smaller amount of generated code.
To clarify, each addition operation, in a deployed cycle, takes 4 bytes. Thus, we need 16 bytes for 4 operations of addition in the expanded form. At the same time, the SIMD addition instruction also performs 4 addition operations, but takes only 4 bytes. This means that we have fewer instructions for the CPU. In addition to this, in the case of the SIMD instruction, the CPU can make assumptions and perform optimization, but this is beyond the scope of this article. What is even better is that modern processors can execute more than one SIMD instruction at a time, i.e., in some cases, you can apply a mixed strategy, at the same time perform a partial cycle scan and vectorization.
In general, you need to start by looking at the Vector<T>
general purpose class for your tasks. He, like the new WFs , will embed SIMD instructions, but at the same time, given the versatility of this class, he can reduce the number of “manual” coding.
The code might look like this:
public int SumVectorT(ReadOnlySpan<int> source) { int result = 0; Vector<int> vresult = Vector<int>.Zero; int i = 0; int lastBlockIndex = source.Length - (source.Length % Vector<int>.Count); while (i < lastBlockIndex) { vresult += new Vector<int>(source.Slice(i)); i += Vector<int>.Count; } for (int n = 0; n < Vector<int>.Count; n++) { result += vresult[n]; } while (i < source.Length) { result += source[i]; i += 1; } return result; }
This code works faster, but we are forced to refer to each element separately when calculating the final amount. Also, Vector<T>
does not have a precisely defined size, and may vary, depending on the equipment on which the code is running. hardware-specific built-in functions provide additional functionality that can slightly improve this code and make it a little faster (the price will be additional code complexity and maintenance requirements).
| Method | Count | Mean | Error | Stddev |
|---|---|---|---|---|
| SumVectorT | one | 4.517 ns | 0.0752 ns | 0.0703 ns |
| SumVectorT | 2 | 4.853 ns | 0.0609 ns | 0.0570 ns |
| SumVectorT | four | 5.047 ns | 0.0909 ns | 0.0850 ns |
| SumVectorT | 8 | 5.671 ns | 0.0251 ns | 0.0223 ns |
| SumVectorT | 16 | 6.579 ns | 0.0330 ns | 0.0276 ns |
| SumVectorT | 32 | 10.460 ns | 0.0241 ns | 0.0226 ns |
| SumVectorT | 64 | 17.148 ns | 0.0407 ns | 0.0381 ns |
| SumVectorT | 128 | 23.239 ns | 0.0853 ns | 0.0756 ns |
| SumVectorT | 256 | 62.146 ns | 0.8319 ns | 0.7782 ns |
| SumVectorT | 512 | 114.863 ns | 0.4175 ns | 0.3906 ns |
| SumVectorT | 1024 | 172.129 ns | 1.8673 ns | 1.7467 ns |
| SumVectorT | 2048 | 429.722 ns | 1.0461 ns | 0.9786 ns |
| SumVectorT | 4096 | 654.209 ns | 3.6215 ns | 3.0241 ns |
| SumVectorT | 8192 | 1 675.046 ns | 14.5231 ns | 13.5849 ns |
| SumVectorT | 16384 | 2 514.778 ns | 5.3369 ns | 4.9921 ns |
| SumVectorT | 32768 | 6,689.829 ns | 13.9947 ns | 13.0906 ns |

NOTE For this article, I forcefully made the Vector<T>
size equal to 16 bytes using the internal configuration parameter ( COMPlus_SIMD16ByteOnly=1
). This tweak normalized the results when comparing SumVectorT
with SumVectorizedSse
, and allowed us to keep the code simple. In particular, it avoided writing a conditional jump if (Avx2.IsSupported) { }
. This code is almost identical to the code for Sse2
, but deals with Vector256<T>
(32-byte) and processes even more elements in one iteration of the loop.
Thus, using the new built-in functions , the code can be rewritten as follows:
public int SumVectorized(ReadOnlySpan<int> source) { if (Sse2.IsSupported) { return SumVectorizedSse2(source); } else { return SumVectorT(source); } } public unsafe int SumVectorizedSse2(ReadOnlySpan<int> source) { int result; fixed (int* pSource = source) { Vector128<int> vresult = Vector128<int>.Zero; int i = 0; int lastBlockIndex = source.Length - (source.Length % 4); while (i < lastBlockIndex) { vresult = Sse2.Add(vresult, Sse2.LoadVector128(pSource + i)); i += 4; } if (Ssse3.IsSupported) { vresult = Ssse3.HorizontalAdd(vresult, vresult); vresult = Ssse3.HorizontalAdd(vresult, vresult); } else { vresult = Sse2.Add(vresult, Sse2.Shuffle(vresult, 0x4E)); vresult = Sse2.Add(vresult, Sse2.Shuffle(vresult, 0xB1)); } result = vresult.ToScalar(); while (i < source.Length) { result += pSource[i]; i += 1; } } return result; }
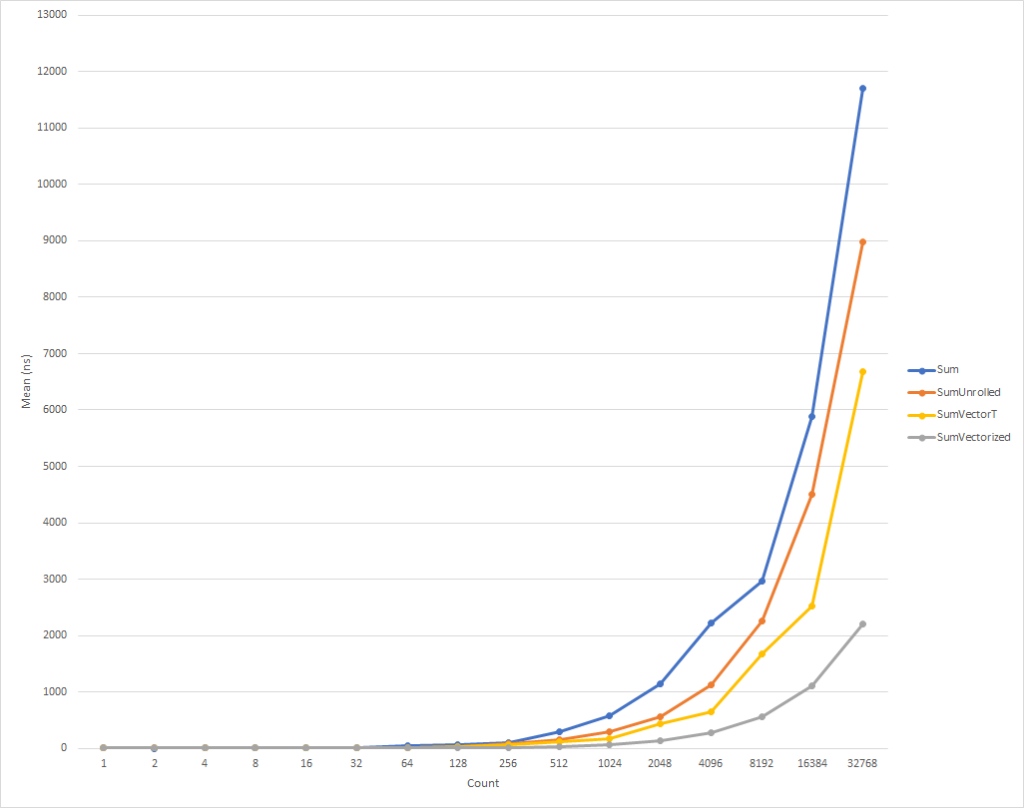
This code, again, is a bit more complicated, but it is significantly faster for everyone except the smallest input sets. For 32 thousand elements, this code executes 75% faster than the expanded cycle, and 81% faster than the source code of the example.
You noticed that we wrote some IsSupported
checks. The first one checks if the current hardware supports the required set of built-in functions , if not, then optimization is performed through a combination of sweep and Vector<T>
. The latter option will be selected for platforms like ARM / ARM64 that do not support the required instruction set, or if the set has been disabled for the platform. The second IsSupported
test, in the SumVectorizedSse2
method, is used for additional optimization if the hardware supports the Ssse3
instruction Ssse3
.
Otherwise, most of the logic is essentially the same as for the expanded loop. Vector128<T>
is a 128-bit type containing Vector128<T>.Count
elements. In this case, uint
, which itself is 32-bit, can have 4 (128/32) elements, this is how we launched the loop.
| Method | Count | Mean | Error | Stddev |
|---|---|---|---|---|
| Sumvectorized | one | 4.555 ns | 0.0192 ns | 0.0179 ns |
| Sumvectorized | 2 | 4.848 ns | 0.0147 ns | 0.0137 ns |
| Sumvectorized | four | 5.381 ns | 0.0210 ns | 0.0186 ns |
| Sumvectorized | 8 | 4.838 ns | 0.0209 ns | 0.0186 ns |
| Sumvectorized | 16 | 5.107 ns | 0.0175 ns | 0.0146 ns |
| Sumvectorized | 32 | 5.646 ns | 0.0230 ns | 0.0204 ns |
| Sumvectorized | 64 | 6.763 ns | 0.0338 ns | 0.0316 ns |
| Sumvectorized | 128 | 9.308 ns | 0.1041 ns | 0.0870 ns |
| Sumvectorized | 256 | 15.634 ns | 0.0927 ns | 0.0821 ns |
| Sumvectorized | 512 | 34.706 ns | 0.2851 ns | 0.2381 ns |
| Sumvectorized | 1024 | 68.110 ns | 0.4016 ns | 0.3756 ns |
| Sumvectorized | 2048 | 136.533 ns | 1.3104 ns | 1.2257 ns |
| Sumvectorized | 4096 | 277.930 ns | 0.5913 ns | 0.5531 ns |
| Sumvectorized | 8192 | 554.720 ns | 3.5133 ns | 3.2864 ns |
| Sumvectorized | 16384 | 1 110.730 ns | 3.3043 ns | 3.0909 ns |
| Sumvectorized | 32768 | 2 200.996 ns | 21.0538 ns | 19.6938 ns |
Conclusion
New built-in functions give you the opportunity to take advantage of the hardware-specific functionality of the machine on which you run the code. There are approximately 1,500 APIs for X86 and X64 distributed over 15 sets, there are too many to describe in one article. By profiling code to identify bottlenecks, you can determine the part of the code that will benefit from vectorization and observe a pretty good performance boost. There are many scenarios where vectorization can be applied and loop unfolding is just the beginning.
Anyone who wants to see more examples can look for the use of built-in functions in the framework (see dotnet and aspnet ), or in other community articles. And although the current WFs are vast, there is still a lot of functionality that needs to be introduced. If you have the functionality you want to introduce, feel free to register an API request via dotnet / corefx on GitHub . The API review process is described here and there is a good example of an API request template specified in step 1.
Special thanks
I want to express special gratitude to the members of our community Fei Peng (@fiigii) and Jacek Blaszczynski (@ 4creators) for their help in implementing the WF , as well as to all members of the community for valuable feedback regarding the development, implementation and ease of use of this functionality.
Afterword to the translation
I like to observe the development of the .NET platform, and, in particular, the C # language. Coming from the world of C ++, and having a little development experience in Delphi and Java, I was very comfortable starting writing programs in C #. In 2006, this programming language (namely the language) seemed to me more concise and practical than Java in the world of managed garbage collection and cross-platform. Therefore, my choice fell on C #, and I did not regret it. The first stage in the evolution of a language was simply its appearance. By 2006, C # absorbed all the best that was at that time in the best languages and platforms: C ++ / Java / Delphi. In 2010, F # went public. It was an experimental platform for studying the functional paradigm with the goal of introducing it into the world of .NET. The result of the experiments was the next stage in the evolution of C # - the expansion of its capabilities in the direction of FP, through the introduction of anonymous functions, lambda expressions, and, ultimately, LINQ. This extension of the language made C # the most advanced, from my point of view, general-purpose language. The next evolutionary step was related to supporting concurrency and asynchrony. Task / Task <T>, the whole concept of TPL, the development of LINQ - PLINQ, and, finally, async / await. , - , .NET C# — . Span<T> Memory<T>, ValueTask/ValueTask<T>, IAsyncDispose, ref readonly struct in, foreach, IO.Streams. GC . , — . , .NET C#, , . ( ) .
All Articles