私は教育プロジェクト「 SERVODROID 」の責任者です。 私のプロジェクトは、子供と大人向けの繰り返しやすいロボットを開発しています。 私自身はサンクトペテルブルクでロボット工学を教えています。 しかし、私はアスリートでもあり、お気に入りのスポーツ分野の1つはウィンタースポーツです。スラロームについては後で説明します。
わが国の広大な地域には、普通の人々が疑うことのない存在について多くの素晴らしい場所があります。 しかし、私はそのような場所から来ているので、このプロジェクトで彼について話をしたいと思います。 ロシア北部のムルマンスク地方には、目立たないが非常に緊密な都市、またはむしろニッケルと呼ばれる集落があります。この都市で採掘される周期表の要素にちなんで名付けられました。 市の人口は約10,000人です。 そして、そのようなまばらな人口の多い都市では、大都市でそれを呼ぶように、本当のスキーリゾートがあるかもしれないと誰が思ったでしょう。 人口10万人の場合、これは本物のスキーリゾートで、スポーツセクションが開催され、子供と大人がトレーニングと勉強をします。専用のスキーリフトがあり、スキーやスノーボードのフリーライドもできます。
簡単な歴史的背景
50年代に、ニケルスキー愛好家のアレクセイコロヴィンと彼の友人たちは、その時に密に生い茂ったリサヤの丘の開拓地を切り始めました。 1966年、彼は同じ設計の牽引ロープを開発し、クラスの学童の最初のグループを採用しました。 このセットから、ニコライ・サルティコフとヴァレリー・ザバラは現在スケートをしています。
70〜80年に、チームは地域の大会に参加し、15チームのトップ3で自信を持って優勝しました。 スポーツのニッケルスキーセクションのマスター、オレグズエフの生徒は、ソビエト連邦のチャンピオンシップの優勝者であり、受賞者でもあるノースフェスティバルのチャンピオンです。 その後、彼はキーロフスクでコーチとして働いた。 彼の娘はスラロームでロシアのチャンピオンであり、彼の息子のステパンはロシア代表チームのメンバーであり、ロシアのチャンピオンであり、欧州選手権の多くの大会で優勝しています。 ノボクズネツクトレーナーA.ノビコフは、ロシアのチャンピオン、エレナプロステバを育てました。 彼はニッケルスキーの生徒でもあります。
プレゼント
現在、スキーはロシアの新しいチャンピオンのトレーニングに引き続き取り組んでいます! 私たちのような小さな都市でさえ、この山でのアスリートの勝利でも、国全体の勝利として、私たちはアスリートを大いに応援しています。
以下では、ビデオを見ることができます-山での競技会の開催方法と乗り物:
このプロジェクトの本質
私自身はアスリートであり、組み合わせて、私は教師であるため、若い世代が彼らの知識とスキルを自己開発し、実証する機会を持つことがいかに重要であるかを理解しています-そして、結局、スポーツ競技はこのための大きな動機です!
スキー場には、参加者がどれだけの距離を歩いているかを記録できる最新のシステムはありません。基本的に、測定は旧式に行われます。レフリーストップウォッチを使用して、トランシーバーの参加者の開始と終了を通知します。 はい、方法は実証済みで安定していますが、審査員と参加者自身に斬新さと便利さを追加して、トレーニングをより効率的に行い、結果を独立して監視できるようにしたいと思っていました。 このため、私はシンプルで信頼できるオプションを作成したいプロジェクトを思いつきました。
OMEGA-自動仕上げレコーダーシステム
あなたがスポーツで知っているように-参加者の仕事は、最短時間でポイント「A」からポイント「B」に到達することです。 そして、この時間を考慮するために、タイマーが開始フラグの交差点から正確に開始し、終了線が交差するときに停止するプロセスを自動化する必要があります。 2016年に、そのようなデバイスを組み立てるというアイデアを得ました。 アイデアがサポートされ、1か月後に山でデモデバイスをテストしたことに注意してください。 デバイスは完全に配線されました。山に沿って300メートルの距離まで配線が配置され、それに沿って信号が裁判官のコンピューターに送信されました。 ここでどのように見えるかを見ることができます 。 システムは機能しましたが、ワイヤーを使用すると恒久的な故障(ベイへの折り畳みと展開中の破損)と裁判官のコンピューターの凍結が発生し、寒い屋外に置く必要がありました。
以下のビデオは、ワイヤレスで動作し、裁判官が快適な状態にあることを可能にするシステムの新しいバージョンの動作バージョン、および数分でシステムを展開して運用するプロセスを示しています。
ビデオ:OMEGA-模擬テスト4:28
変更点と今後の予定
2019年に、ハードウェアを再設計し、ワイヤを無線モジュールに置き換えることにしました。 市場の無線モジュールの既存のオプションを研究した後、私はかなり有望な無線通信モジュールNRF24に決めました。 これらの通信モジュールを使用すると、最大1000 km、私の場合は2000 kmの距離でデータを転送できます。
システムの構成
1.ラウンチパッドモジュールは、Arduinoオンボードミニコンピューター、NRF24L01通信モジュール、および参加者の動きを記録する特別なセンサーを組み込んだデバイスです。 センサーに加えて、モジュールには、スタートが許可または禁止されていることを参加者に明らかにする特別な音と光のインジケータが装備されています。 これにより、審査員と管理者の作業を軽減し、参加者のスタートの質と高速道路での移動に集中することができます。
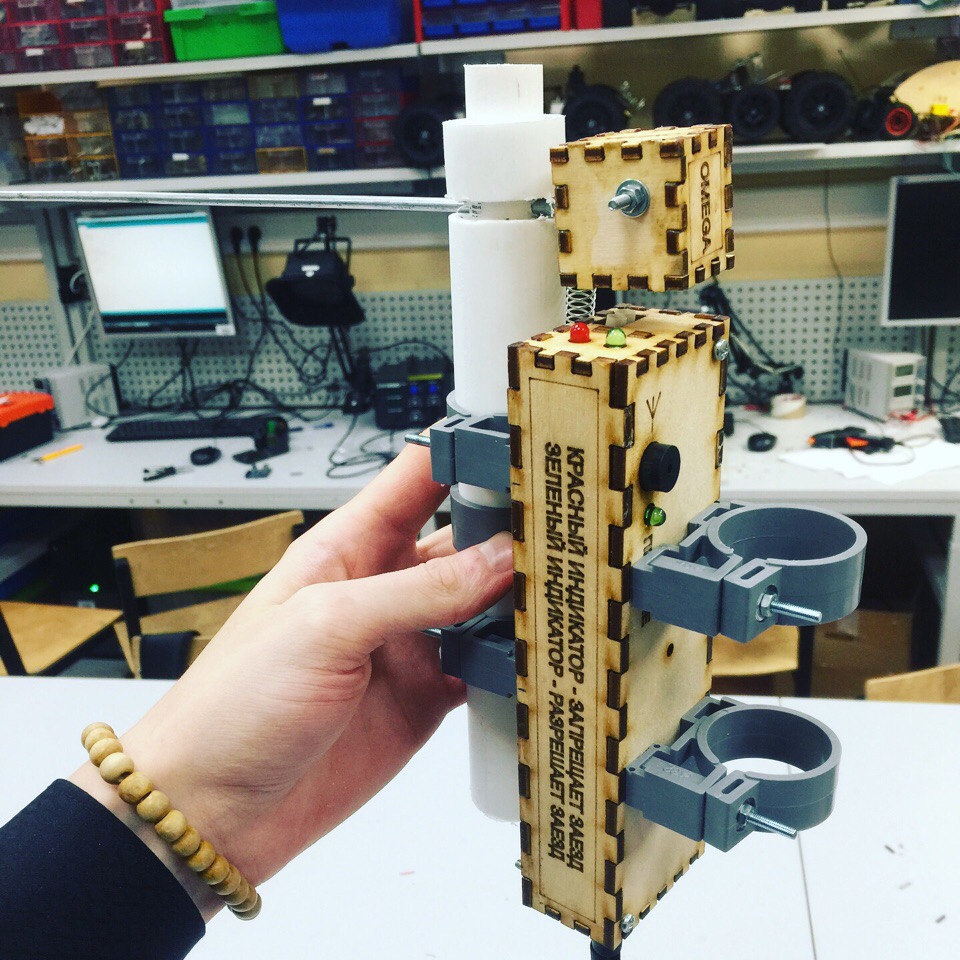
(写真:開始フラグがインストールされた「開始」テーブルのモジュールと、サポートにインストールするためのマウントが雪の中に掘られている)
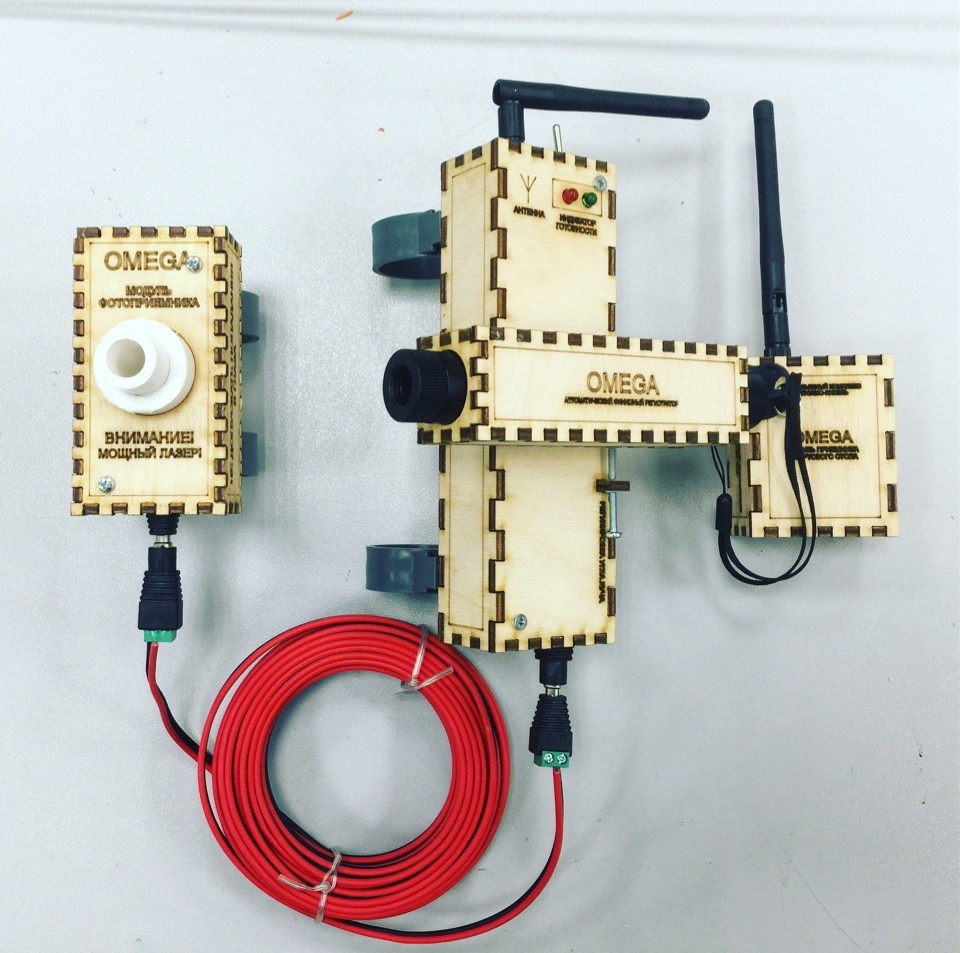
2.フィニッシュテーブルモジュールは、上記のモジュールと同じコンポーネントセットを組み込んだデバイスですが、いくつかの違いがあります。強力なレーザービームを使用して、フィニッシュセグメントの交差点を登録します。スキー条件だけでなくシステム。 モジュールにはアンテナ、取り付けメカニズムがあり、それを使用して、雪に根ざしたシャベル上でも、丸い物体に固定できます!
(写真:レーザーモジュールが取り付けられたフィニッシュテーブルのモジュールと、レーザー光を測定するための10メートルケーブル-光検出器)
3.無線通信モジュール -これらの小さなボックスは、最大1000-2000メートルの距離(リモートアンテナとアンプを備えた2つの同一モデルによる長い距離)で信号を送受信できます。これは、裁判官が司法で快適に過ごせることを意味します。家、そして落ち着いて、暖かく、コーヒーを飲みながら各参加者のレースを登録します。 有線システムの場合-それは大きな不快感でした-私はフィニッシュで仕事を制御して座っていたので、私は自分自身を知っています=)モジュールはUSBケーブルを介してコンピュータに接続し、ラップトップの電源で動作します。 裁判官の機動性とシステムの展開の容易さのための合理的にシンプルで効果的なソリューション。

(写真:タイマーソフトウェアが実行されるコンピューターに接続する受信モジュール)
4.ソフトウェアはシステムの最も重要な部分です。
ソフトウェアは、C#およびC / C ++で開発されています。 プログラムの主なタスクは、アイロンをバインドし、裁判官に便利で明確な(単純な)作業インターフェイスを提供することです。 プログラムは手動モードと自動モードの両方で動作し、参加者の開始時にタイマーを独立して開始し、フィニッシュラインを超えたときにタイマーを独立して停止します。時間は表に入力します。 競技の経験を知る-参加者が自分の命令に従う時間がないことがしばしばあり、このスコアではプログラムはすでにそのようなオプションを提供します。 また、プログラムは、裁判官がデータを強制的に保存してExcelで表示することで、誤ってプログラムをシャットダウン/終了することを防ぎます。
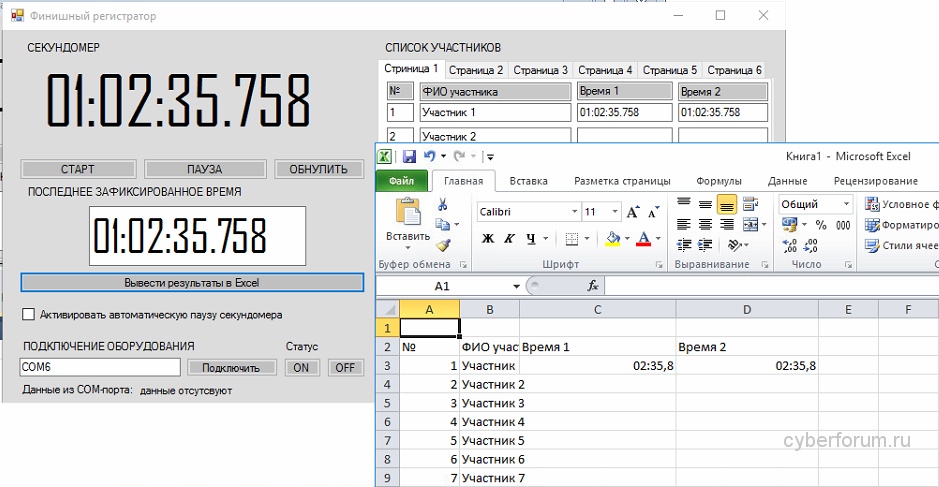
(写真:裁判官が働くプログラムのインターフェースは時間を記録し、アイロンの動作を制御します)
このシステムの構成
最初の計算は、私の村などの小さな都市で使用される無線コンポーネントの容易な可用性に基づいていたため、私は最も人気がありアクセスしやすいコンポーネントを選択しようとしました。
- 無線モジュールNRF24L01 + PA + LNA 1100m-4個
- 4 mmの合板シート-切断ボックスと必要な要素用
- Arduino UNOボード-4個
- NRF24L01用アダプター-これがないと、これらの通信モジュールは不適切に動作します
- 合板の箱とシステム設計(レーザー加工機ですべてを切り取る)
- 更新の可能性があるソフトウェア開発(主にArduinoおよびC#の審判員プログラムの機能を補完および改善するための更新)
- フィニッシュテーブルの詳細を接続する10メートルのケーブル
- レーザーモジュールは、本質的に任意のレーザーポインターです。 あらゆる種類の面白い装身具を備えた店舗で非常に人気があり、新しいものを購入することですぐに交換できるため、私はこれを選択しました
- ポータブルモジュール用の充電式バッテリー
- 消耗品、接着剤、ワイヤー、インジケーター、ボタン、コネクター。
現在、私はすでにシステムのハードウェアとソフトウェアのテストとデバッグを行っています。先日、私はスキーに出て、山でそこでテストしました。
私はこのプロジェクトを自分自身で収集しています-脳がリラックスして新しい情報を取得しないように、そしてもちろん、スキーに感謝したいのですそしてもちろん私は奉仕したいです!
あなたがスポーツにも興味があり、自動化、または実際にはスポーツに興味があるなら、私はあなたのサポートに満足します-詳細はこちら (:VKontakteの私のグループで 、実際の開発と実装の開発と進捗をフォローできます 。