私が犯罪的要素、妄想的または不誠実な夫だとは思わないが、どういうわけか私はGPS妨害機を買うことにした。 まず、プロセス自体が面白かった。 結局、ケースは違法であるように見え、売り手は危険にさらされているようです。 ただ聞いたり読んだりするのではなく、これに参加したかったのです。 第二に、それは純粋に技術的にも純粋に経済的にも面白かった-それがどのように行われ、どれくらいの費用がかかるか。
これが読み進めたもの。
エピグラフ
ロボットを失いました。 作業は停止しましたが、
検出できません。
A. Azimov、「ロボットが迷子になった方法」
一人の友人の誕生日に
I.ツァリック、「チャンスをつかむ」
検出できません。
A. Azimov、「ロボットが迷子になった方法」
一人の友人の誕生日に
I.ツァリック、「チャンスをつかむ」
GPS妨害装置とGPSスプーファが特に必要なわけではない理由。 今日、誰もが「新しい貴族」でさえも彼らをより大きな安全のために使用していることを知っています。 これは特にモスクワの住民に知られています。 それでは、普通の人について話しましょう。 さて、いつ隣人の小さな不便さを気にかけましたか? 「もし」「彼らは気にしない」 必要に応じて、切り取って行きます。」
しかし、テクノロジーの世界は深刻に行き詰っています。 今日、ナビゲーターは、かなりの数のドライバー、特に代表者の「公正な髪」の頭脳の延長です。 あなたは笑顔で不平を言うことができますが、このプロセスは発展しています。 そして、それらすべてがナビゲーションを遮断するとどうなりますか?
今、未来のロボドライバーを想像してください...
私が個人的にジャマーを使わないようにと言ったことではありません。 それどころか、それらなしで以下に説明する手法に従事することは、私にとって個人的にはあまり面白くないでしょう。 誰が戦争であり、誰に対して...
まとめ-敵は直接知っている必要があります。 ジャマーは小さなものであり、 海老沼教授の 「微調整」衛星ナビゲーションの仕事があることは知っていますが、敵の最も簡単な方法にも興味があります。
ナビゲーションを削減する最も安価な方法は、2500ルーブルかかりました。

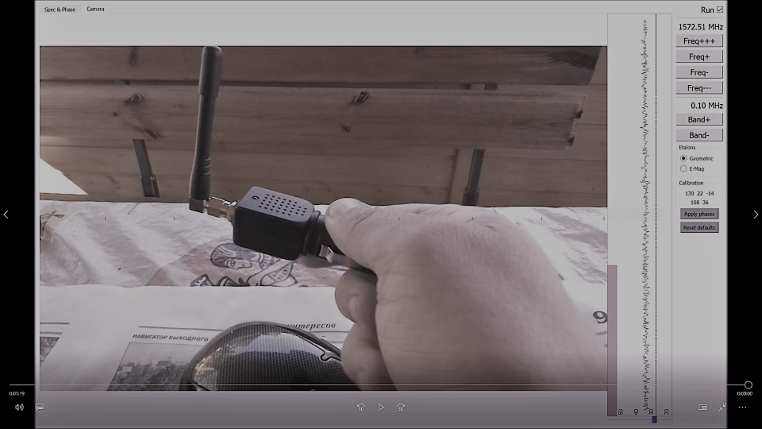
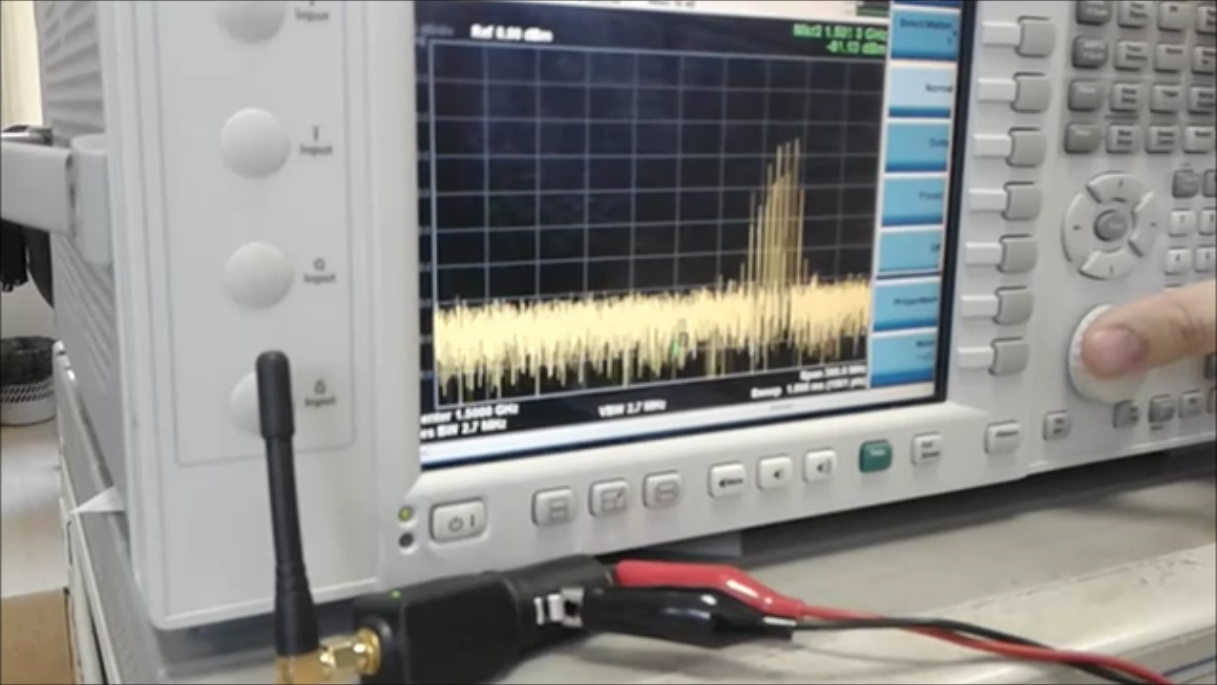
物事は簡単ですが、脳疾患のように見えるパッケージに含まれています。 少なくともすぐに感染しました。 ここでは、お気に入りのマウス(
そして彼が持っているなんて豊かなスペクトル (ビデオ)!
さらに、私の中のこの感染は破壊的な行動に進行し、私はそれを解体しました:
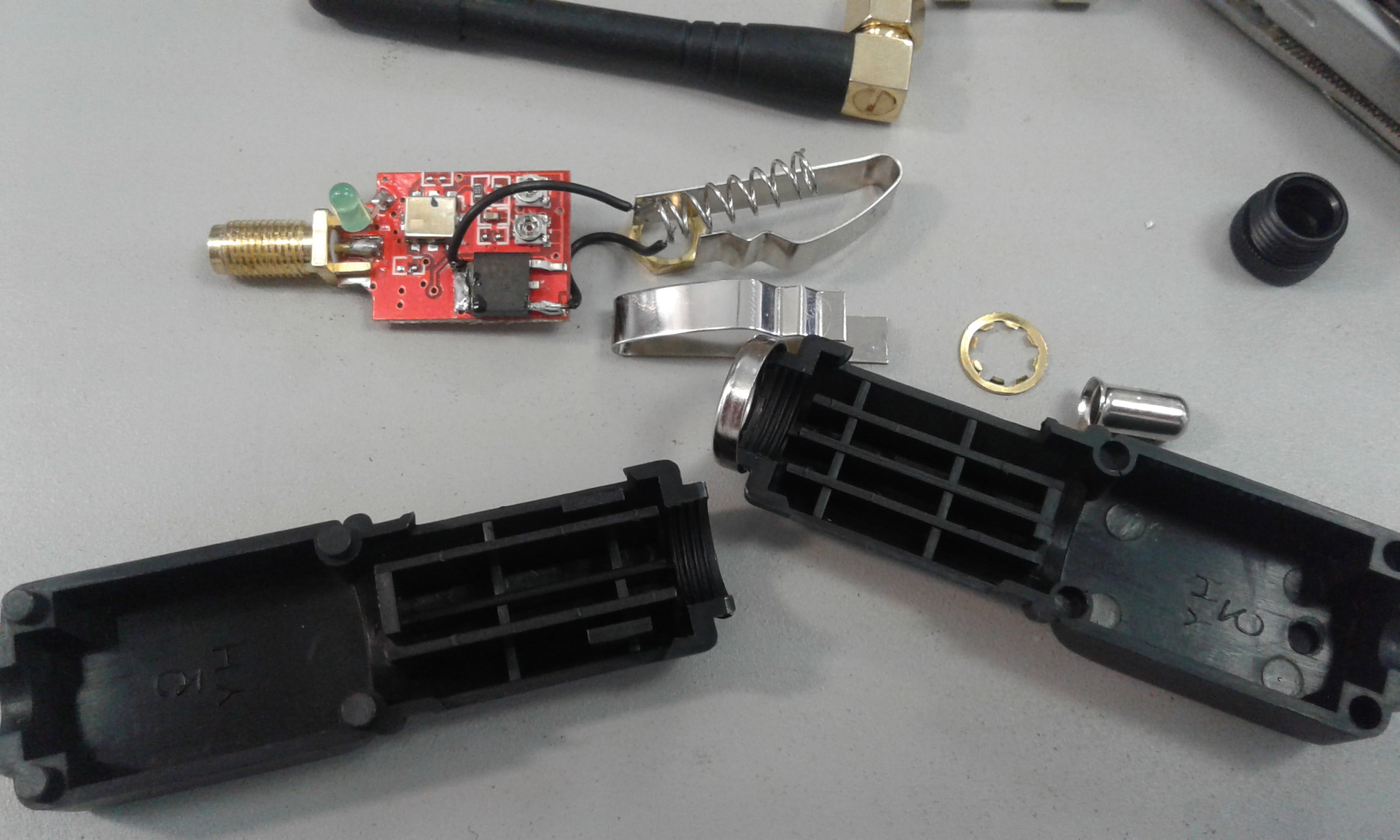
すべてが非常にシンプルで上品で、ほとんど素朴です。 そして今、あなたは皆、なぜ悪魔が赤いのか理解しています。 (私はThe Red Demonの物語も好きですが。)
しかし、それは何をしているのでしょう!
異端審問の燃える炎! これで、30回ビールを節約したすべての子供は、エリア内のすべてのナビゲーションを「燃やす」ことができます。 ここで私は国でこのことを始めたことに注意したいです。 負傷者は一人もいなかった。
そして、運命への服従で、私はこれらの邪悪なものを発見したいという欲求に燃え上がりました。 私は、お気に入りの拡張現実と素晴らしいNT1065チップを使用して、方向探知機を作り始めました。
NT1065には、単一のローカルオシレータを使用するように設定できる4つの無線パスが含まれています。 これは構造図で見ることができます:

その後、4つのチャネルすべてが、無線パスの識別に対して正確に同相になります。 下の図は、位相差のスペクトルを示しています。

位相差は安定しているため、NT1065に基づいた4チャンネルの位相方向ファインダーを作成することができます。
前の記事からボードを取り上げ、低ノイズアンプ(LNA)を備えた4つのアンテナを追加します。 LNAなしでも可能ですが、アンテナのマッチングが不十分な範囲で信号を少し上げたいと思いました。
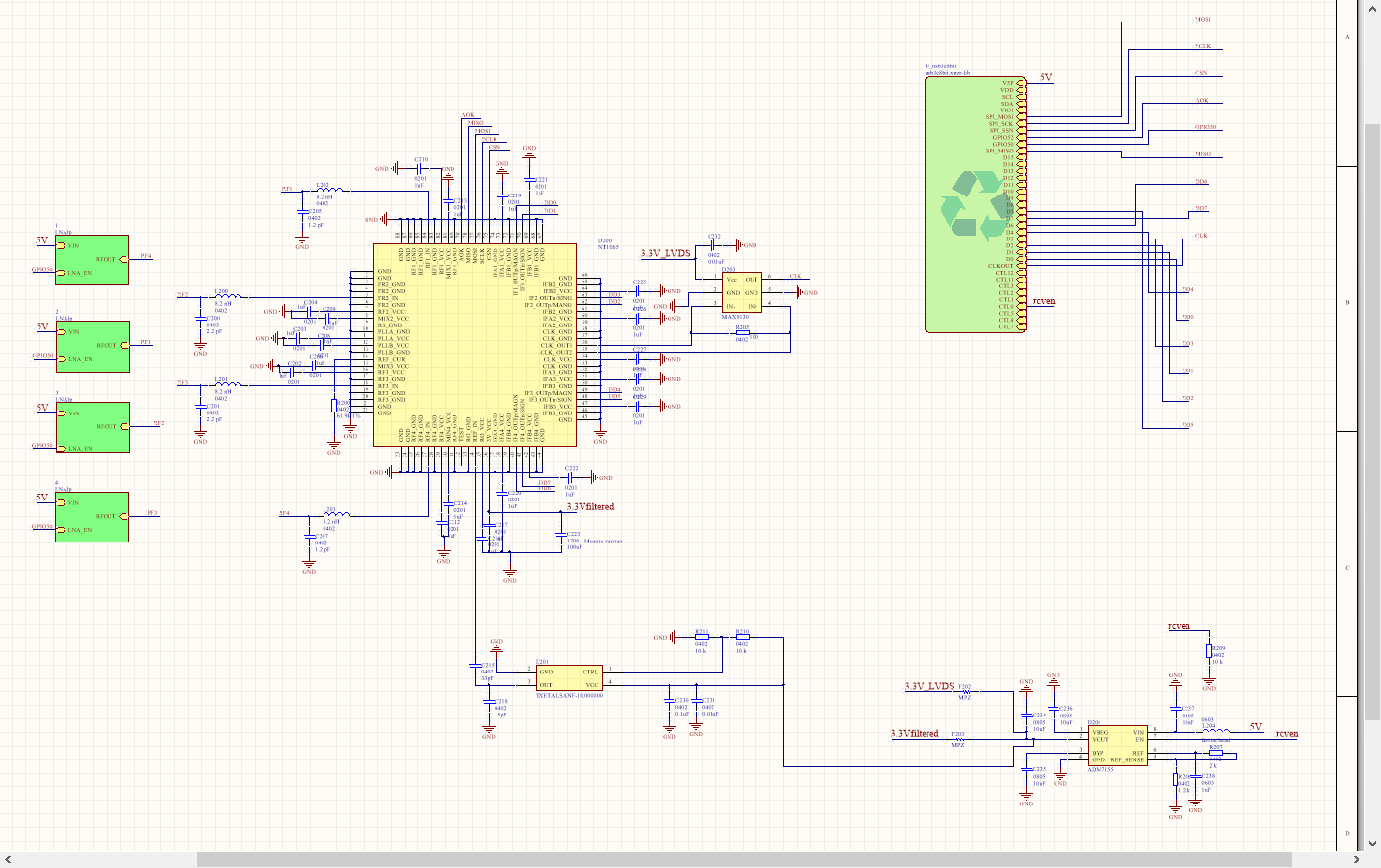
NT1065入力でのインストールに推奨される高周波フィルターは、単純化と方向探知機の柔軟性のために省略することをお勧めします。 アンテナは上部ナビゲーション範囲(L1)にのみ調整されますが、感度に目を閉じて、下部範囲(L2、L3、L5など)で方向探知機を使用してみてください。 後で何が起こるか見ていきます。
これは鉄片です。
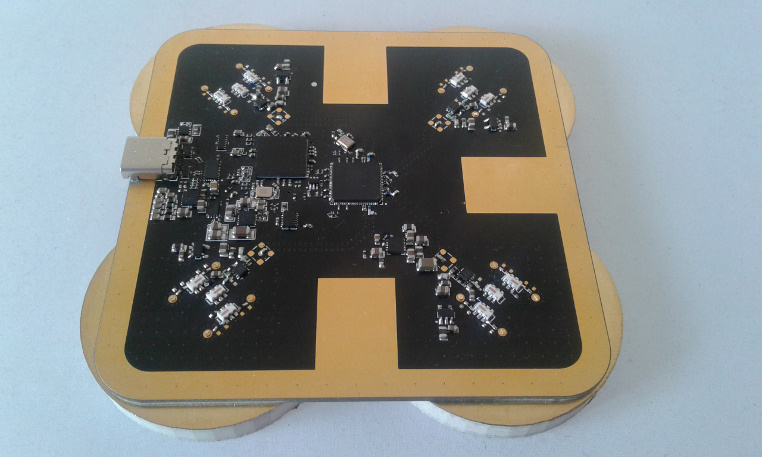
私はいじくり回さなければなりませんでした。 すべてを片側に配置します。一方、アンテナのみです。 超小型回路の配線に関する推奨事項を無視せずに、そうではありませんでした。 後で舐めます。
そして今- ソフトウェア (ビデオ)。

ソースはこちらです。
簡単に言うと、ソフトウェアは次のように機能します:連続サンプルをいくつか取得し、FFT(もちろんウィンドウを使用)にし、ユーザーが選択した帯域内のFFT(ビン)の周波数サンプルを平均し、方位を計算します。 これらはすべて、方位計算を除き、教育を受けた一般の人々に説明するのが退屈な標準操作です。
ここでは、すべてが簡単な方法で行われます。アルゴリズムは「ビームフォーミング」と呼ぶことができます。英語ではおそらくビームフォーマがあります。アンテナアレイで受信した信号に最も近いビームパターンのメインローブの方向を見つけます。 式は次のとおりです。
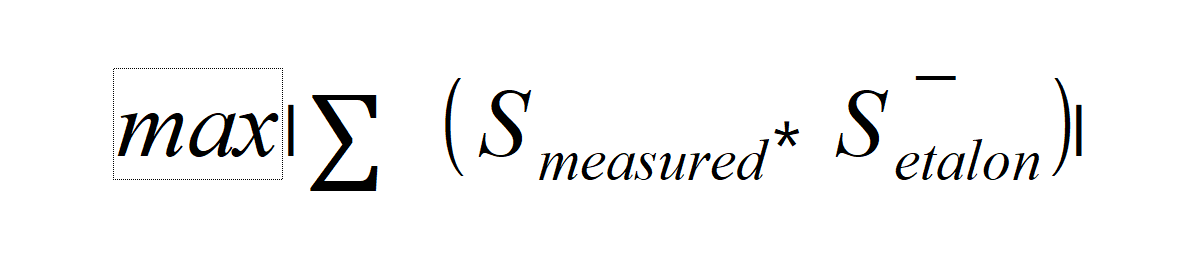
GitHubの特定のコードを参照してください。
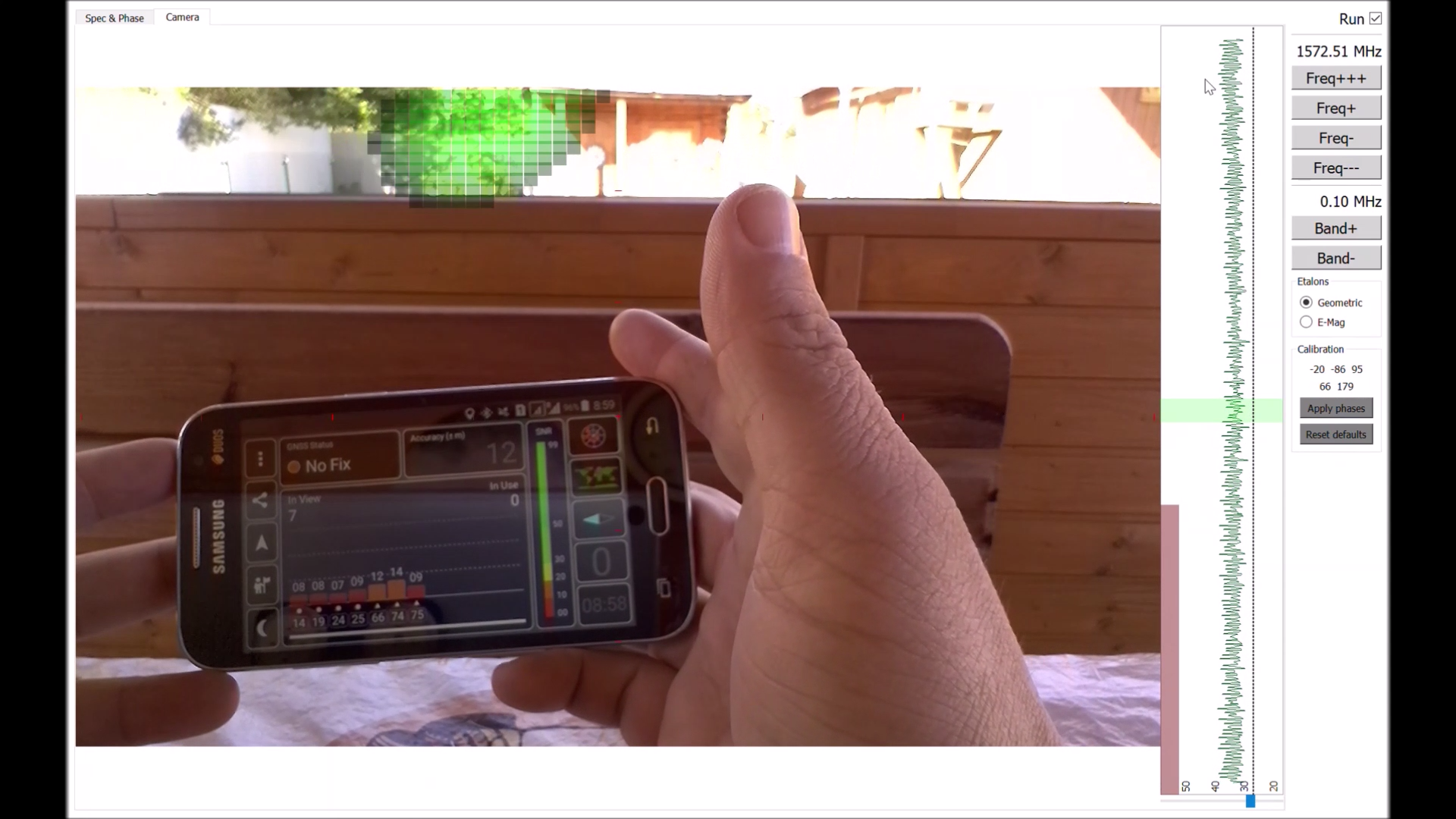
次に、放射パターンの最大値から、1パーセントを確保してカットします。 角度領域、つまり信号源が位置する可能性が最も高い特定の角度の「雲」を取得します。 角のこの領域は、タブレットのカメラからの実際のビデオによって隠されています。 一般的に、鉄片は次のようになります(通常、タブレットの背面に取り付けられているため)。

そして、それは次のように機能します:( ビデオ) 。
処理された周波数帯域の位置と幅を選択し、信号レベルに応じてしきい値を設定することもできます。 ストリップの総電力のインジケータもあり、最初に大まかなセクターを見つけることができます。
このような位相方向探知機を以前のWiFi用の振幅方向探知機と比較すると、これは根本的に感度が高くなります。 まあ、彼はもはや手動ではなく、自動です。 つまり、原則として、回転する必要はありません。 ただし、精度に重点を置くので、これを行うことをお勧めします。 反対に、それも機能しません。 内部アンテナの歪みはほとんどありません。
しかし、ビデオが示すように、誰も干渉をキャンセルしませんでした。 直接ビームがない場合、歪みが大きくなる可能性があります。 また、偏光依存性もあります。
それが私の努力をさらに進めたいものです。
PS:下の範囲、ナビゲーションの言葉遣いL2、L3、L5などでは、これまでのところうまく動作しません。 校正を吸う必要があります。