Gazebo 3Dパッケージをシミュレーターとして使用し、サッカーを余儀なくされるヒューマノイドDARwIn-OPをユニバーサルロボットプラットフォームとして使用します。
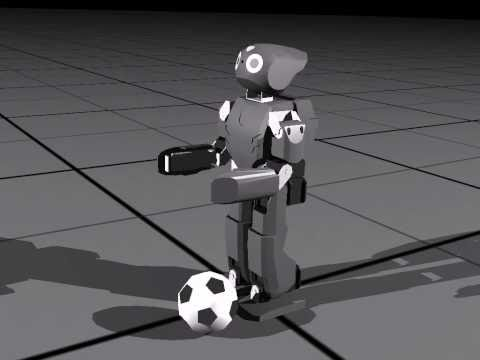
Gazebo SimulatorのDARwIn-OP
レッスンを学び、コード例を使用し、独自のアルゴリズムを作成するために、高価な機器やソフトウェアを購入する必要はありません。 すべてのソフトウェアは無料であり、アルゴリズムのデバッグとデモンストレーションはシミュレータで実行されます。 完成したプロジェクトは実際のロボットに移植され、結果が実証されます。
非営利団体OSRF(オープンソースロボット財団)によって開発されたGazebo 3Dには 、他のロボットシミュレーターに比べていくつかの利点があります。 まず、無料で、オープンソースのコードがあります。 第二に、それはグローバルなロボット工学コミュニティの間で非常に人気があり、公式のDARPA競争シミュレータです。 第三に、GazeboはROS(Robot Operating System)ソフトウェアプラットフォームと完全に統合されているため、GazeboとROSで開発された仮想ロボットを管理するプログラムは、実際のロボットに比較的簡単に移行できます。
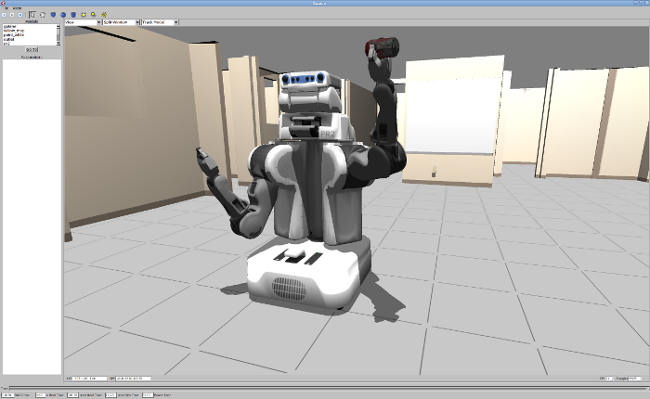
シミュレーターGazeboのロボットPR2
このレッスンでは、最新バージョンのGazeboをインストールし、 ROSソフトウェアプラットフォームに接続し、DARwinロボットの物理モデルをダウンロードして歩かせる方法を学びます。 最後に、キーボードからロボットを動かすための簡単なリモートコントロールシステムをセットアップします。 並行して、ROSのインフラストラクチャを習得します。
ROSのインストール
最も時間のかかる最初のステップは、ROSとGazeboをインストールすることです。 ROSをインストールするには、Linux PC(Ubuntu 15.04など)が必要です。 WindowsまたはMac OSユーザーの場合、Linux UbuntuがインストールされたVirtual Boxなどの仮想マシンを使用できます。 仮想マシンの下で通常の3Dサポートを構成できなかったため、Gazeboがクラッシュしたか、ブレーキを使用していたことにすぐに気付きます。 したがって、ワークアウトとして仮想マシンを使用できますが、実際の開発ではLinuxを使用することをお勧めします。
ROSは2つの方法でインストールできます。 最初の方法は比較的簡単です-ビルド済みのDebianパッケージをインストールします。 この方法は、Ubuntu Saucy(13.10)またはTrusty(14.04)、または例えばDebian Wheezyをインストールした場合に適しています。 2番目の方法はより複雑でわかりにくいものです-これはソースからのインストールです。 これを使用して、Ubuntuまたは他のLinuxディストリビューションの新しいバージョンにROSをインストールできます。
以下のインストール例は、Linux Ubuntu 15.04で実行されました。
それでは始めましょう!
プログラムメニューから、またはctrl + alt + tのキーの組み合わせを押して、bashターミナルを開きます。 まず、ROSの自己ロードと初期化のためのユーティリティをインストールする必要があります。 UbuntuまたはDebianを使用している場合、packages.ros.orgへのリンクをリポジトリに追加することでこれを行うことができます。
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' $ wget https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -O - | sudo apt-key add - $ sudo apt-get update $ sudo apt-get install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential
発言
pipパッケージマネージャーでも同じことができますが、Ubuntuユーザーの場合は、最初のオプションをお勧めします。
$ sudo apt-get install python-pip $ sudo pip install -U rosdep rosinstall_generator wstool rosinstall
rosdepを初期化します。 Rosdepは、ROSシステムの依存関係をインストールするためのコマンドラインツールです。
$ sudo rosdep init $ rosdep update
それでは、catkinユーティリティを使用してROSパッケージをビルドしましょう。 Catkinは、ROSインフラストラクチャを構築および管理するためのマクロのセットです。
ROSをインストールするためのディレクトリを作成し、キーパッケージをダウンロードします。
$ mkdir ~/workspace/ros -p $ cd ~/workspace/ros
rosinstall_generatorコマンドは、ROSのインストールに必要なパッケージのリストを作成します; ros_comm、ベースデスクトップ、または完全desktop_fullの最小インストールをパラメーターとして指定できます。 desktop_fullを設定すると、Gazebo 2.0が含まれます。 このバージョンはすでに古く、現在のバージョンは5.xです。 したがって、デスクトップ構成を選択し、Gazeboを個別にインストールします。
$ rosinstall_generator desktop --rosdistro indigo --deps --wet-only --tar > indigo-desktop-wet.rosinstall
インストールするパッケージのリストがindigo-desktop-wet.rosinstallファイルに生成されたら、wstoolユーティリティを使用してワークスペースを初期化し、パッケージをダウンロードします。
$ wstool init src indigo-desktop-wet.rosinstall
発言
何らかの理由でインストールが中断された場合、次のコマンドでプロセスを再開できます。
$ wstool update -t src
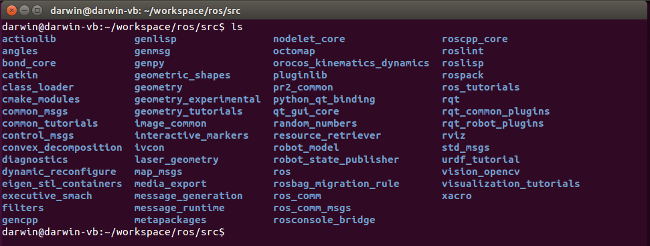
インストール後、srcディレクトリでダウンロードしたパッケージを見つけることができます
次に、rosルートディレクトリに移動し、rosdepコマンドを実行して、ダウンロードしたパッケージのシステム依存関係をインストールします。
$ cd ~/workspace/ros $ rosdep install --from-paths src --ignore-src --rosdistro indigo -y
すべての依存関係を正常にインストールした後、最終的にcatkinビルド自動化システムを使用してパッケージをコンパイルできます。 これは、catkin_make_isolatedコマンドまたはcatkin_makeコマンドで実行されます。 パッケージの一部がCMake(別の一般的なビルド自動化システム)を使用する場合はCatkin_make_isolatedを使用し、すべてのパッケージがcatkinを使用する場合はcatkinを使用する場合はcatkin_makeを使用する必要があります。 基本リポジトリーは混合タイプであるため、catkin_make_isolatedコマンドを使用します。
$ ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release
ROSインフラストラクチャが機能するためには、環境変数を設定し、必要なすべてのパスを規定する必要があります。 これを行うには、setup.bashスクリプトを実行します。
$ source ~/workspace/ros/install_isolated/setup.bash
このコマンドは、現在のbashコンソールに対してのみ環境変数を構成します。 デフォルトでROS環境変数をbashに追加する場合は、sourceコマンドを.bashrcファイルに書き込むことができます。 このファイルは、新しいbashコンソールを開くときに実行されます。
$ echo "source ~/workspace/ros/install_isolated/setup.bash" > ~/.bashrc
おめでとうございます! これでROSのインストールが完了しました。いくつかのコマンドを実行して、ROSが正しく機能するかどうかを確認しましょう。
ROSインフラストラクチャの管理に使用できるコマンドを一覧表示するには、コンソールでrosと入力し、Tabキーを2回押します。 すべてのROSコマンドはrosプレフィックスで始まるため、bashはオートコンプリートの結果として名前を表示します。
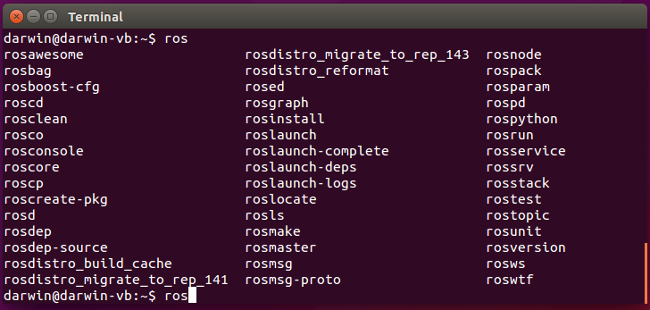
ROSコマンドのリスト。 すべてのチームは接頭辞rosで始まります
簡単なリモコンなど、何かを起動しましょう。 まず、管理したいオブジェクトが必要です。それをturtlesimのタートルにします。 そのため、rosrunコマンドを使用してturtlesimサーバーを起動します。 これを行うには、新しいコンソールを開いてコマンドを実行します。
$ rosrun turtlesim turtlesim_node
カメのいるウィンドウが画面に表示されます。 次に、テレコントロールモジュールを起動します。このために、新しいコンソールを開いてコマンドを実行します。
$ rosrun turtlesim turtle_teleop_key
次に、矢印キーを使用して、カメを動かしてみます。 たとえば、次のように。
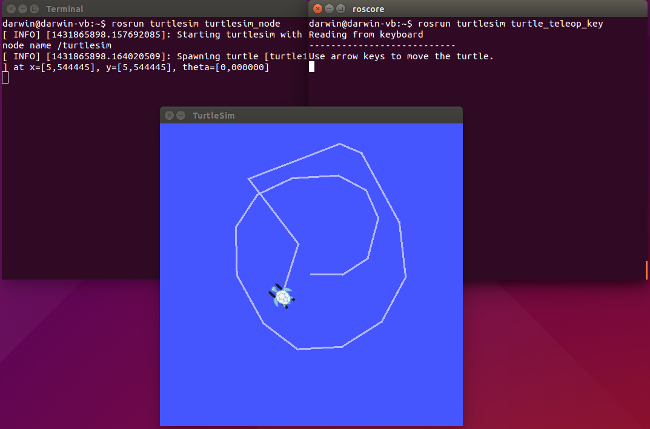
亀の遠隔操作の例
そこで、テレコントロール用の分散システムを構築しました。ここでは、turtlesimとteleopは、ros_commミドルウェアを介して通信する独立したプロセスです。 turtlesimおよびteleopプロセスは、ネットワーク接続された1台または異なるPCに配置できます。 これらのプロセスの関係は、rqt_graphユーティリティを使用して表示できます。
$ rosrun rqt_graph rqt_graph
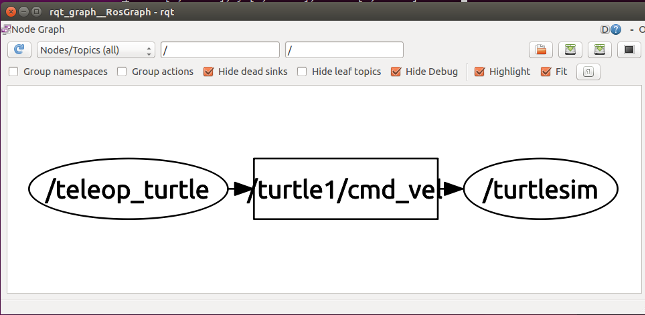
rqt_graphユーティリティは、分散ロボット制御システムのトポロジを表示するために使用されます
rqt_graphでは、楕円は制御システムのさまざまなプロセス(ノード)の概要を示し、プロセス間で情報を転送するのに役立つ四角形のデータ型(トピック)を示します。 矢印は、データ転送の方向を示します。 したがって、teleopノードは、指定されたロボット速度を含むcmd_velトピックを発行し、turtlesimはこのトピックにサブスクライブしていることがわかります。
rostopicコマンドを使用して、トピックの内容を見ることができます。 listパラメーターはシステム内のすべてのアクティブなトピックを表示し、echoコマンドは指定されたトピックの内容を表示します。 cmd_velの内容を表示するには、隣接するコンソールからカメを操縦することを忘れないでください。そうしないと、データは送信されません。
$ rostopic list $ rostopic echo /turtle1/cmd_vel
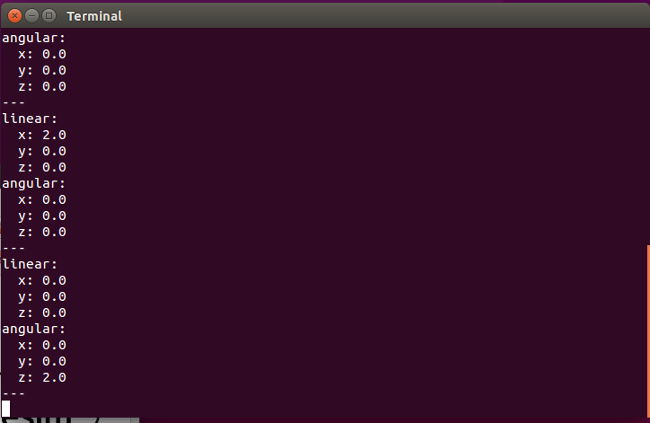
コンテンツ/ turtle1 / cmd_vel-タートルの線形および角速度をターゲット
ROSのインストールに成功したら、Gazeboシミュレーターのインストールに進みます。
Gazeboのインストール
ソースからGazeboをコンパイルするのではなく、Ubuntuパッケージマネージャーを使用して最新バージョンをインストールするだけです。 これを行うには、リポジトリをGazeboに接続し、キーを追加してインストールします。
$ sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-latest.list' $ wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add - $ sudo apt-get update $ sudo apt-get install gazebo5 libgazebo-dev
次に、ROS Indigoの一部であるGazeboの古いバージョンへのパッケージの依存関係を無視し、インストールしたばかりの最新バージョンを使用するように、rosdepを構成する必要があります。 これを行うには、rosdep設定ファイルディレクトリに移動し、gazeboパッケージを無視するように指定するlocal.yamlファイルを作成します。 次に、sources.list.dディレクトリに移動し、新しく作成したスクリプトを10-local.listに追加します。 次に、更新コマンドを実行して、新しい構成を有効にします。
$ cd /etc/ros/rosdep $ sudo bash -c 'echo "gazebo: { ubuntu: { vivid: [] } }" > local.yaml' $ cd ./sources.list.d $ sudo bash -c 'echo "yaml file:///etc/ros/rosdep/local.yaml" > 10-local.list' $ rosdep update
最終段階では、GazeboシミュレーターとROSインフラストラクチャを接続するパッケージ、および3DモデルとDARwIn-OPロボットコントローラーの説明を含むパッケージをインストールする必要があります。 このプロセスを簡素化するために、必要な依存関係をすべてダウンロードする小さなスクリプトを用意しました。
作業ディレクトリに移動して、githubのリポジトリからスクリプトを読み込みます。
$ cd ~/workspace $ git clone https://github.com/robotgeeks/ros_gazebo_darwin.git
次に、前述のようにros_gazebo_darwinディレクトリに移動し、catkinワークスペースを初期化し、indigo-gazebo-darwin.rosinstallファイルにリストされているパッケージをダウンロードします。
$ cd ~/workspace/ros_gazebo_darwin $ wstool init src indigo-gazebo-darwin.rosinstall
次に、ダウンロードしたばかりのパッケージをコンパイルしてインストールします。
$ catkin_make install
次に、ワークスペースの環境変数とパスを追加します。 これを行うには、次のコマンドを実行します。
$ source ~/workspace/ros_gazebo_darwin/install/setup.bash $ echo "source ~/workspace/ros_gazebo_darwin/install/setup.bash" > ~/.bashrc
いいね! GazeboとDARwIn-OPモデルのインストールが正常に完了しました。できるだけ早く結果を実行しましょう。
シミュレーターGazeboで作業する
最後に、多くの苦しみの後、ロボットモデルを備えたシミュレータを立ち上げる時が来ました。 これを行うには、roslaunchコマンドを使用してdarwin_gazebo.launchスクリプトを実行します。
$ roslaunch darwin_gazebo darwin_gazebo.launch
スクリプトの結果は、Gazeboウィンドウを起動し、対応する仮想コントローラーとセンサーを備えたロボットの3Dモデルをロードする必要があります。 シミュレーションを開始するには、仮想タイマーパネルのウィンドウの下部にある再生ボタンをクリックする必要があります。
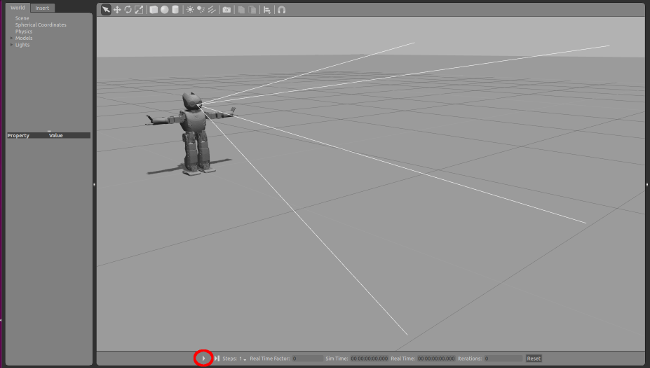
DARwIn-OPロボットモデルをロードしたGazeboシミュレーター。 (赤でマークされた再生ボタンをクリックすることを忘れないでください)
次に、新しいコンソールを開いて、ロボットのモーション制御プログラムを実行します。 速度コマンドをデカルト座標からロボットの脚、胴体、腕にあるサーボモーターの動きに変換します。
$ roslaunch darwin_gazebo darwin_walker.launch
最後に、3番目のコンソールで、リモートコントロールプログラムを実行します。 そのタスクは、キーボードからコマンドを読み取り、指定された速度に変換して、モーション制御プログラムに送信することです。
$ roslaunch darwin_control darwin_teleop.launch
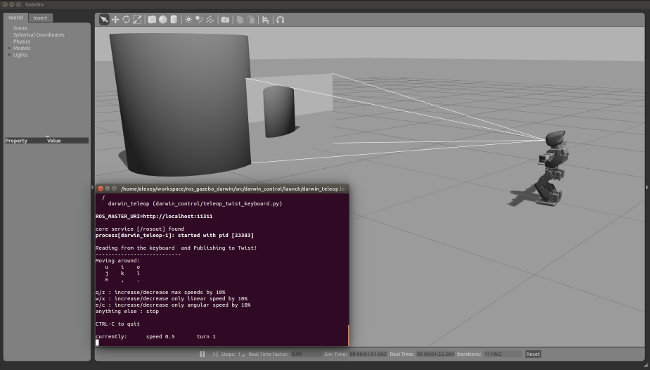
シミュレーターGazeboのリモート制御ロボットDARwIn-OP
テレコントロールシステムの構造がどのように見えるかに興味がある場合は、rqt_graphユーティリティを使用して、実行中のROSプロセスと通信チャネルをグラフィカルに表示できます。
$ rosrun rqt_graph rqt_graph
ご覧のとおり、turtlesimの例と比較すると、この制御システムははるかに複雑で、要素が多くなっています。 この要素数は、Darwin-OPモデルには24個の仮想サーボモーターがあり、darwin_walkerおよびwalkerプログラムによって制御され、darwin_teleopプログラムから設定速度を受け取るためです。
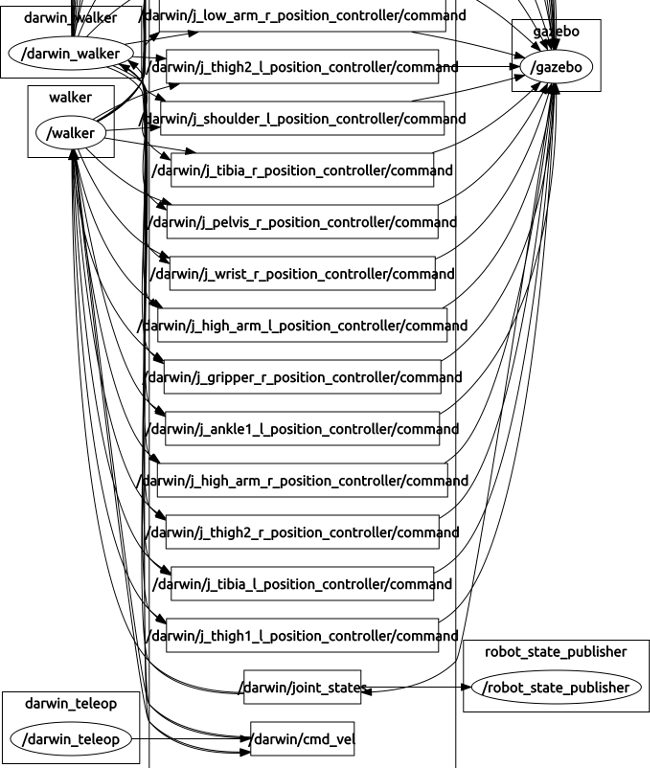
GazeboシミュレーターのDARwIn-OPロボット制御システムデバイス
まとめると。 このチュートリアルでは、ソースからROS Indigoをインストールしてコンパイルする方法を学びました。 これは、ROSシステムのデバイスとそのコマンドについて少し理解し、最新バージョンのGazebo 3Dシミュレーターを接続するために、教育目的で行いました。 次に、Robotisが製造したDARwIn-OPヒューマノイドロボットをダウンロードし、簡単な制御システムをセットアップしました。 ROSの機能のおかげで、当社のシステムは、ネットワークに接続された1台または複数のPCの両方で動作できます。
次のレッスンでは、ROSの機能を引き続き理解し、ロボットの仮想世界に新しいオブジェクト(ボールやゴールなど)を追加してみます。 ボールを認識し、特定のポイントへの動きを制御する独自のプログラムを作成し、もちろん目標を達成します!
じゃあね!
ソース:
www.ros.org
www.gazebosim.org
www.generationrobots.com/en/content/83-carry-out-simulations-and-make-your-darwin-op-walk-with-gazebo-and-ros