
こんにちは、Habr!
私の名前はIgor Litvinenkoです。主にiOS向けに、モバイルデバイス用に3年以上開発しています。 DataArtでは、コンピュータービジョンのさまざまなタスクの促進について研究しています。画像処理、拡張現実プログラムの開発、モバイルデバイスに特化したニューラルネットワークの使用などです。 今日、私はサッカーに関連する私たちの研究/ファンプロジェクトについてお話ししたいと思います。
最新技術とパターン認識の開発に関する紹介と長いスピーチの代わりに、すぐに問題の説明に進みましょう。
問題の声明
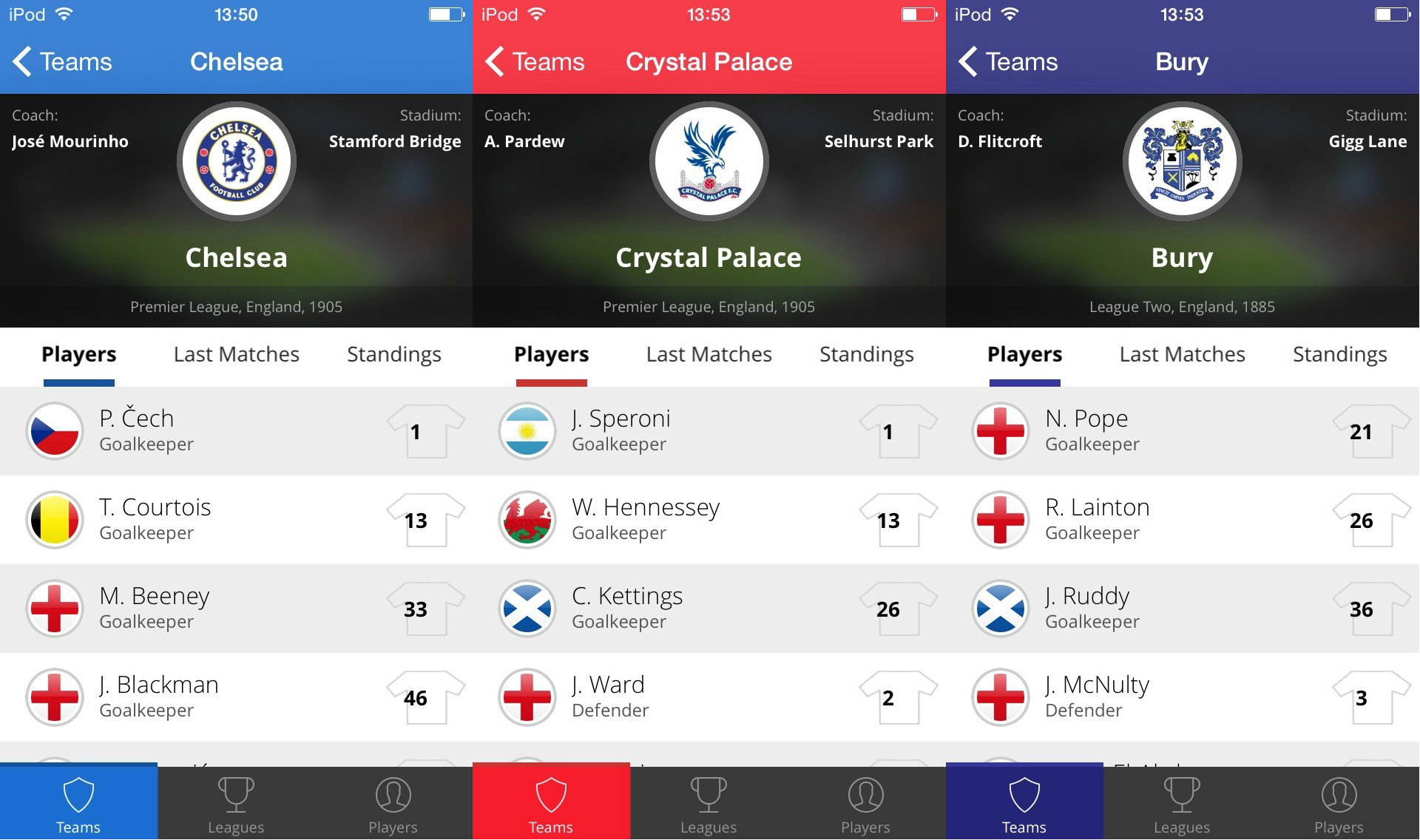
サッカークラブ、ラインナップ、最近の試合に関する関連情報を表示するモバイルアプリケーションを開発する必要があります。 使いやすさのために、アプリケーションの一種のキラー機能では、ロゴの上に電話を置いたときにコマンドに関する情報を表示できます。 アプリケーションは、インターネットに接続しなくても動作するはずです。 認識できるチームの推定数は約100です(ここではもう選択しませんでした。イギリスのメインフットボールリーグのすべてのクラブをカバーしたかっただけです)。 もう1つの機能は、最後に認識されたロゴに基づいてユーザーインターフェイスを「再描画」する機能です。
要件の分析と既成のソリューションの検索
ビデオストリーム内の特定の画像を認識する問題を解決する必要があることは明らかです。 ただし、オフラインで作業する、正直に言うと、ソリューションの範囲が大幅に縮小されます。 そのため、既製のクラウドソリューションを使用したり、サーバー側で複雑な認識を実行したりすることはできなくなりました。 つまり すべての計算はクライアント側でのみ実行する必要があります。
2番目の問題は、認識オブジェクトの数と複雑さです。 サッカーチームのロゴがめったにお互いに似ていないことは秘密ではありません。 さらに、シンプルな形状のロゴはほとんどなく、任意の表面に適用できます(きらめきのある雑誌、任意の背景、わずかに色が変わり、モノクロのタトゥーの形でも)。
追加の複雑な要因-旗の画像は確実に変形します。旗は硬い表面ではありません。
最後に、ロゴは常に参照ビューと比較して何らかの回転角度を持っています。 単純な場合、これは単一の軸に沿った回転になり、最悪の場合、3つの軸すべてに沿った回転になります。
ある時点で、フットボールクラブのロゴがマーカーになるマーカー拡張現実の作成に非常によく似たタスクがあることに気付きました。 この瞬間について少し説明します。
概して、拡張現実の巨大なタスクは、マーカーの検索、3Dでの回転角度の決定、マーカーの上部へのコンテンツの表示、必要な変換の適用という2つのサブタスクに分けることができます。 最初の問題を解決した結果だけが必要で、それから私たち自身です。
車輪を再発明するのではなく、既製の数学エンジンを採用することにしました。 しかし、いつものように、悪魔は詳細にあります。 原則として、すべての既製の商用エンジンは、1つのセッションで同時に検出できるマーカーの数に正確に制限を設定します。 私は非営利団体の話をしたくない:認識の質、そこの認識の安定性は明らかに十分ではない。 彼らがうまく機能できる最大のものは、黒い枠で囲まれたシンプルなマーカーを見つけることです。
あなたはまだOpenCVの方向を掘ることができますが、それは多くの時間を要し、結果はほとんどの非商用エンジンと通信するよりもわずかに良いでしょう。 少し掘り下げた後、問題の理想的な解決策はクアルコムのVuforiaであることが判明しました。 のような、何と理由-以下をお読みください。
Vuforiaを選んだ理由
Vuforiaは、マーカーの認識、追跡(ビデオフレーム内のマーカーの維持)、および回転角度の計算を正確に行う数少ないエンジンの1つです。 KFORには、オブジェクトのレンダリングを簡素化するコードは含まれておらず、例ではOpenGL ESのみを使用しています。 実際、これはプロジェクトでは必要ありませんでした。情報画面を表示します。 ただし、拡張現実の古典的な問題を解決する場合、これは深刻なマイナスになります。 VuforiaにはこのようなタスクのためのUnityプラグインがありますが、包括的なソリューションを使用する方が便利だと思います(この点で同じMetaIOがはるかに便利です)。 Vuforiaには次のような利点があります。
- 第一に、この製品はかなり前から存在しており、モバイルプロセッサのメーカーによって開発されています。 これは、製品が携帯電話向けに最適化されていることを示唆しています。
- 第二に、制限なしで完全に無料です。 もちろん、クラウドでの認識などの有料サービスはたくさんありますが、無料版で十分に対応できます。
- 第三に、ドキュメント、開発者フォーラム、コミュニティ。 そこでは、質問に対する答えを見つけることができます。 そして、もちろん、各エンジン機能の使用例
- Cherry on the cake-ソリューションを共有する必要がある場合に備えて、最も人気のあるモバイルプラットフォーム用のバージョンがあります。
統合の技術的部分
Vuforia自体は、プロジェクトに追加する必要があるライブラリです。 ただし、その操作のために、いくつかのコンパイルフラグを変更する必要があります。 Vuforiaを接続する最も簡単な方法は、公式サイトから例をダウンロードし、そこから対話用のコードを抽出することです。 このコードはすべてのプロジェクトに共通です。つまり、単により使いやすい形式にするだけです。
はじめに、EAGLViewのコード
ネタバレの下の多くのコード
MSImageRecognitionEAGLView.mm - (void)dealloc { [self deleteFramebuffer]; if ([EAGLContext currentContext] == _context) { [EAGLContext setCurrentContext:nil]; } } - (id)initWithCoder:(NSCoder *)aDecoder{ self = [super initWithCoder:aDecoder]; if (self){ vapp = [MSImageRecognitionSession sharedSession]; [self setup]; } return self; } - (id)initWithFrame:(CGRect)frame{ self = [super initWithFrame:frame]; if (self){ vapp = [MSImageRecognitionSession sharedSession]; [self setup]; } return self; } - (id)initWithFrame:(CGRect)frame appSession:(MSImageRecognitionSession *) app { self = [super initWithFrame:frame]; if (self) { vapp = app; [self setup]; } return self; } - (void)setup { if (YES == [vapp isRetinaDisplay]) { [self setContentScaleFactor:2.0f]; } _context = [[EAGLContext alloc] initWithAPI:kEAGLRenderingAPIOpenGLES2]; if (_context != [EAGLContext currentContext]) { [EAGLContext setCurrentContext:_context]; } offTargetTrackingEnabled = NO; } - (void)finishOpenGLESCommands { if (_context) { [EAGLContext setCurrentContext:_context]; glFinish(); } } - (void)freeOpenGLESResources { [self deleteFramebuffer]; glFinish(); } - (void) setOffTargetTrackingMode:(BOOL) enabled { offTargetTrackingEnabled = enabled; } - (void)renderFrameQCAR { [self setFramebuffer]; glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); QCAR::State state = QCAR::Renderer::getInstance().begin(); QCAR::Renderer::getInstance().drawVideoBackground(); glEnable(GL_DEPTH_TEST); if (offTargetTrackingEnabled) { glDisable(GL_CULL_FACE); } else { glEnable(GL_CULL_FACE); } glCullFace(GL_BACK); if(QCAR::Renderer::getInstance().getVideoBackgroundConfig().mReflection == QCAR::VIDEO_BACKGROUND_REFLECTION_ON) glFrontFace(GL_CW); else glFrontFace(GL_CCW); glDisable(GL_DEPTH_TEST); glDisable(GL_CULL_FACE); glDisableVertexAttribArray(vertexHandle); glDisableVertexAttribArray(normalHandle); glDisableVertexAttribArray(textureCoordHandle); QCAR::Renderer::getInstance().end(); [self presentFramebuffer]; } - (void)createFramebuffer { if (_context) { glGenFramebuffers(1, &_defaultFramebuffer); glBindFramebuffer(GL_FRAMEBUFFER, _defaultFramebuffer); glGenRenderbuffers(1, &_colorRenderbuffer); glBindRenderbuffer(GL_RENDERBUFFER, _colorRenderbuffer); [_context renderbufferStorage:GL_RENDERBUFFER fromDrawable:(CAEAGLLayer*)self.layer]; GLint framebufferWidth; GLint framebufferHeight; glGetRenderbufferParameteriv(GL_RENDERBUFFER, GL_RENDERBUFFER_WIDTH, &framebufferWidth); glGetRenderbufferParameteriv(GL_RENDERBUFFER, GL_RENDERBUFFER_HEIGHT, &framebufferHeight); glGenRenderbuffers(1, &depthRenderbuffer); glBindRenderbuffer(GL_RENDERBUFFER, depthRenderbuffer); glRenderbufferStorage(GL_RENDERBUFFER, GL_DEPTH_COMPONENT16, framebufferWidth, framebufferHeight); glFramebufferRenderbuffer(GL_FRAMEBUFFER, GL_COLOR_ATTACHMENT0, GL_RENDERBUFFER, _colorRenderbuffer); glFramebufferRenderbuffer(GL_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, GL_RENDERBUFFER, depthRenderbuffer); glBindRenderbuffer(GL_RENDERBUFFER, _colorRenderbuffer); } } - (void)deleteFramebuffer { if (_context) { [EAGLContext setCurrentContext:_context]; if (_defaultFramebuffer) { glDeleteFramebuffers(1, &_defaultFramebuffer); _defaultFramebuffer = 0; } if (_colorRenderbuffer) { glDeleteRenderbuffers(1, &_colorRenderbuffer); _colorRenderbuffer = 0; } if (depthRenderbuffer) { glDeleteRenderbuffers(1, &depthRenderbuffer); depthRenderbuffer = 0; } } } - (void)setFramebuffer { if (_context != [EAGLContext currentContext]) { [EAGLContext setCurrentContext:_context]; } if (!_defaultFramebuffer) { [self performSelectorOnMainThread:@selector(createFramebuffer) withObject:self waitUntilDone:YES]; } glBindFramebuffer(GL_FRAMEBUFFER, _defaultFramebuffer); } - (BOOL)presentFramebuffer { glBindRenderbuffer(GL_RENDERBUFFER, _colorRenderbuffer); return [_context presentRenderbuffer:GL_RENDERBUFFER]; } MSImageRecognitionSession.mm #import "MSImageRecognitionSession.h" #import <QCAR/QCAR.h> #import <QCAR/QCAR_iOS.h> #import <QCAR/Tool.h> #import <QCAR/Renderer.h> #import <QCAR/CameraDevice.h> #import <QCAR/VideoBackgroundConfig.h> #import <QCAR/UpdateCallback.h> #import <QCAR/TrackerManager.h> #import <QCAR/ImageTracker.h> #import <QCAR/Trackable.h> #import <QCAR/DataSet.h> #import <QCAR/TrackableResult.h> #import <QCAR/TargetFinder.h> #import <QCAR/Trackable.h> #import <QCAR/ImageTarget.h> #import <AVFoundation/AVFoundation.h> namespace { // --- Data private to this unit --- // NSerror domain for errors coming from the Sample application template classes static NSString * const MSImageRecognitionSessionErrorDomain = @"ImageRecognitionSessionErrorDomain"; static const int MS_QCARInitFlags = QCAR::GL_20; // instance of the seesion used to support the QCAR callback there should be only one instance of a session at any given point of time static MSImageRecognitionSession* __sharedInstance = nil; static BOOL __initialized = NO; // camera to use for the session QCAR::CameraDevice::CAMERA mCamera = QCAR::CameraDevice::CAMERA_DEFAULT; // class used to support the QCAR callback mechanism class VuforiaApplication_UpdateCallback : public QCAR::UpdateCallback { virtual void QCAR_onUpdate(QCAR::State& state); } qcarUpdate; } static inline void MSDispatchMain(void (^block)(void)) { dispatch_async(dispatch_get_main_queue(), block); } NSString * const MSImageRecognitionCloudAccessKey = @"MSImageRecognitionCloudAccessKey"; NSString * const MSImageRecognitionCloudSecretKey = @"MSImageRecognitionCloudSecretKey"; @interface MSImageRecognitionSession () { CGSize _boundsSize; UIInterfaceOrientation _interfaceOrientation; dispatch_queue_t _dispatchQueue; QCAR::DataSet **_dataSets; NSInteger _dataSetsCount; BOOL _isCloudRecognition; } @property (atomic, readwrite) BOOL cameraIsActive; @property (nonatomic, copy) MSImageRecognitionBlock recognitionBlock; @end @implementation MSImageRecognitionSession // Determine whether the device has a retina display + (BOOL)isRetinaDisplay { // If UIScreen mainScreen responds to selector displayLinkWithTarget:selector: and the scale property is 2.0, then this is a retina display return ([[UIScreen mainScreen] respondsToSelector:@selector(displayLinkWithTarget:selector:)] && 2.0 == [UIScreen mainScreen].scale); } - (BOOL) isRetinaDisplay{ return [[self class] isRetinaDisplay]; } #pragma mark - Cleanup - (void)cleanupSession:(MSImageRecognitionCompletionBlock)completion; { MSImageRecognitionCompletionBlock blockCopy = completion ? [completion copy] : nil; dispatch_async(_dispatchQueue, ^{ self.recognitionBlock = nil; if(_dataSets) { delete[] _dataSets; _dataSets = NULL; } if(blockCopy) { MSDispatchMain(^{ blockCopy(YES, nil); }); } }); } #pragma mark - Init + (instancetype)sharedSession { static dispatch_once_t onceToken; dispatch_once(&onceToken, ^{ __sharedInstance = [MSImageRecognitionSession new]; }); return __sharedInstance; } - (id)init { self = [super init]; if(self) { QCAR::registerCallback(&qcarUpdate); _interfaceOrientation = UIInterfaceOrientationPortrait; _dispatchQueue = dispatch_queue_create("imageRecognitionSession.queue.FlagRecognition", DISPATCH_QUEUE_SERIAL); } return self; } - (void)initializeSessionOnCloud:(BOOL)isCloudRecognition withCompletion:(MSImageRecognitionCompletionBlock)completion { dispatch_async(_dispatchQueue, ^{ _isCloudRecognition = isCloudRecognition; NSError *error = nil; MSImageRecognitionCompletionBlock blockCopy = completion ? [completion copy] : nil; if(!__initialized && ![self initialize:&error]) { NSLog(@"Failed to initialize image recognition session: %@", error); } MSDispatchMain(^{ if(blockCopy) blockCopy(error == nil, error); }); }); } // Initialize the Vuforia SDK - (BOOL)initialize:(NSError **)error { DLog(@""); NSParameterAssert(error); self.cameraIsActive = NO; self.cameraIsStarted = NO; // If this device has a retina display, we expect the view bounds to have been scaled up by a factor of 2; this allows it to calculate the size and position of // the viewport correctly when rendering the video background. The ARViewBoundsSize is the dimension of the AR view as seen in portrait, even if the orientation is landscape CGSize screenSize = [[UIScreen mainScreen] bounds].size; if ([MSImageRecognitionSession isRetinaDisplay]) { screenSize.width *= 2.0; screenSize.height *= 2.0; } _boundsSize = screenSize; // Initialising QCAR is a potentially lengthy operation, so perform it on a background thread QCAR::setInitParameters(MS_QCARInitFlags); // QCAR::init() will return positive numbers up to 100 as it progresses towards success. Negative numbers indicate error conditions NSInteger initSuccess = 0; do { initSuccess = QCAR::init(); } while (0 <= initSuccess && 100 > initSuccess); if(initSuccess != 100) { *error = [self errorWithCode:E_INITIALIZING_QCAR]; return NO; } [self prepareAR]; __initialized = YES; return YES; } - (void)prepareAR { // Tell QCAR we've created a drawing surface QCAR::onSurfaceCreated(); // Frames from the camera are always landscape, no matter what the orientation of the device. Tell QCAR to rotate the video background (and // the projection matrix it provides to us for rendering our augmentation) by the proper angle in order to match the EAGLView orientation switch (_interfaceOrientation) { case UIInterfaceOrientationPortrait: QCAR::setRotation(QCAR::ROTATE_IOS_90); break; case UIInterfaceOrientationPortraitUpsideDown: QCAR::setRotation(QCAR::ROTATE_IOS_270); break; case UIInterfaceOrientationLandscapeLeft: QCAR::setRotation(QCAR::ROTATE_IOS_180); break; case UIInterfaceOrientationLandscapeRight: QCAR::setRotation(1); break; } if(UIInterfaceOrientationIsPortrait(_interfaceOrientation)) { QCAR::onSurfaceChanged(_boundsSize.width, _boundsSize.height); } else { QCAR::onSurfaceChanged(_boundsSize.height, _boundsSize.width); } } #pragma mark - AR control - (void)resumeAR:(MSImageRecognitionCompletionBlock)block { dispatch_async(_dispatchQueue, ^{ NSError *error = nil; MSImageRecognitionCompletionBlock blockCopy = block ? [block copy] : nil; QCAR::onResume(); // if the camera was previously started, but not currently active, then we restart it if ((self.cameraIsStarted) && (! self.cameraIsActive)) { // initialize the camera if (! QCAR::CameraDevice::getInstance().init(mCamera)) { [self errorWithCode:E_INITIALIZING_CAMERA error:&error]; MSDispatchMain(^{ if(blockCopy) blockCopy(NO, error); }); return; } // start the camera if (!QCAR::CameraDevice::getInstance().start()) { [self errorWithCode:E_STARTING_CAMERA error:&error]; MSDispatchMain(^{ if(blockCopy) blockCopy(NO, error); }); return; } self.cameraIsActive = YES; } MSDispatchMain(^{ if(blockCopy) blockCopy(YES, nil); }); }); } - (void)pauseAR:(MSImageRecognitionCompletionBlock)block { dispatch_async(_dispatchQueue, ^{ MSImageRecognitionCompletionBlock blockCopy = block ? [block copy] : nil; if (self.cameraIsActive) { NSError *error = nil; // Stop and deinit the camera if(! QCAR::CameraDevice::getInstance().stop()) { [self errorWithCode:E_STOPPING_CAMERA error:&error]; MSDispatchMain(^{ if(blockCopy) blockCopy(NO, error); }); return; } if(! QCAR::CameraDevice::getInstance().deinit()) { [self errorWithCode:E_DEINIT_CAMERA error:&error]; MSDispatchMain(^{ if(blockCopy) blockCopy(NO, error); }); return; } self.cameraIsActive = NO; } QCAR::onPause(); MSDispatchMain(^{ if(blockCopy) blockCopy(YES, nil); }); }); } - (void)startAR:(MSImageRecognitionCompletionBlock)block recognitionBlock:(MSImageRecognitionBlock)recognitionBlock; { __block NSError * error_ = nil; __block BOOL isSuccess = YES; MSImageRecognitionCompletionBlock blockCopy = block ? [block copy] : nil; self.recognitionBlock = recognitionBlock; if ([AVCaptureDevice respondsToSelector:@selector(requestAccessForMediaType:completionHandler:)]) { // Completion handler will be dispatched on a separate thread [AVCaptureDevice requestAccessForMediaType:AVMediaTypeVideo completionHandler:^(BOOL granted) { if (YES == granted) { isSuccess = [self startCamera:QCAR::CameraDevice::CAMERA_BACK viewWidth:_boundsSize.width andHeight:_boundsSize.height error:&error_]; if (isSuccess) { self.cameraIsActive = YES; self.cameraIsStarted = YES; } } else { UIAlertView * alert = [[UIAlertView alloc] initWithTitle:@"Permissions Error" message:@"Please allow to use camera in Settings > Privacy > Camera" delegate:nil cancelButtonTitle:@"Okay" otherButtonTitles: nil]; [alert show]; } self.cameraIsActive = NO; self.cameraIsStarted = NO; MSDispatchMain(^{ if(blockCopy) blockCopy(isSuccess, error_); }); }]; } else { isSuccess = [self startCamera:QCAR::CameraDevice::CAMERA_BACK viewWidth:_boundsSize.width andHeight:_boundsSize.height error:&error_]; if (isSuccess) { self.cameraIsActive = YES; self.cameraIsStarted = YES; } if(blockCopy) blockCopy(isSuccess, error_); } } // Stop QCAR camera - (void)stopAR:(MSImageRecognitionCompletionBlock)block { dispatch_async(_dispatchQueue, ^{ NSError *error = nil; MSImageRecognitionCompletionBlock blockCopy = block ? [block copy] : nil; // Stop the camera if (self.cameraIsActive) { // Stop and deinit the camera QCAR::CameraDevice::getInstance().stop(); QCAR::CameraDevice::getInstance().deinit(); self.cameraIsActive = NO; } self.cameraIsStarted = NO; // ask the application to stop the trackers if(![self stopTrackers]) { [self errorWithCode:E_STOPPING_TRACKERS error:&error]; MSDispatchMain(^{ if(blockCopy) blockCopy(NO, error); }); return; } // ask the application to unload the data associated to the trackers if(![self deactivateDataSets]) { [self errorWithCode:E_UNLOADING_TRACKERS_DATA error:&error]; MSDispatchMain(^{ if(blockCopy) blockCopy(NO, error); }); return; } // ask the application to deinit the trackers [self deinitTrackers]; // Pause and deinitialise QCAR QCAR::onPause(); // QCAR::deinit(); MSDispatchMain(^{ if(blockCopy) blockCopy(YES, nil); }); }); } // stop the camera - (void)stopCamera:(MSImageRecognitionCompletionBlock)block { dispatch_async(_dispatchQueue, ^{ NSError *error = nil; MSImageRecognitionCompletionBlock blockCopy = block ? [block copy] : nil; if (self.cameraIsActive) { // Stop and deinit the camera QCAR::CameraDevice::getInstance().stop(); QCAR::CameraDevice::getInstance().deinit(); self.cameraIsActive = NO; } else { [self errorWithCode:E_CAMERA_NOT_STARTED error:&error]; MSDispatchMain(^{ if(blockCopy) blockCopy(NO, error); }); return; } self.cameraIsStarted = NO; // Stop the trackers if(![self stopTrackers]) { [self errorWithCode:E_STOPPING_TRACKERS error:&error]; MSDispatchMain(^{ if(blockCopy) blockCopy(NO, error); }); return; } MSDispatchMain(^{ if(blockCopy) blockCopy(YES, nil); }); }); } // Start QCAR camera with the specified view size - (BOOL)startCamera:(QCAR::CameraDevice::CAMERA)camera viewWidth:(float)viewWidth andHeight:(float)viewHeight error:(NSError **)error { // initialize the camera if (! QCAR::CameraDevice::getInstance().init(camera)) { [self errorWithCode:-1 error:error]; return NO; } // start the camera if (!QCAR::CameraDevice::getInstance().start()) { [self errorWithCode:-1 error:error]; return NO; } // we keep track of the current camera to restart this // camera when the application comes back to the foreground mCamera = camera; // ask the application to start the tracker(s) if(![self startTrackers]) { [self errorWithCode:-1 error:error]; return NO; } // configure QCAR video background [self configureVideoBackgroundWithViewWidth:viewWidth andHeight:viewHeight]; // Cache the projection matrix const QCAR::CameraCalibration& cameraCalibration = QCAR::CameraDevice::getInstance().getCameraCalibration(); _projectionMatrix = QCAR::Tool::getProjectionGL(cameraCalibration, 2.0f, 5000.0f); return YES; } #pragma mark - Trackers management /*! * @brief Trying to connect to cloud database * @param keys Dictionary that should contains access keys for the cloud DB. Must contain values for MSImageRecognitionCloudAccessKey and MSImageRecognitionCloudSecretKey keys. Cannot be nil. * @param completion Completion block. */ - (void)loadCloudTrackerForKeys:(NSDictionary *)keys withCompletion:(MSImageRecognitionCompletionBlock)completion { NSParameterAssert(keys[MSImageRecognitionCloudAccessKey] && keys[MSImageRecognitionCloudSecretKey]); MSImageRecognitionCompletionBlock blockCopy = completion ? [completion copy] : nil; NSError *error = nil; if([self initTracker:&error]) { [self loadCloudTrackerWithAccessKey:keys[MSImageRecognitionCloudAccessKey] andPrivateKey:keys[MSImageRecognitionCloudSecretKey] error:&error]; } MSDispatchMain(^{ if(blockCopy) blockCopy(error == nil, error); }); } - (void)loadBundledDataSets:(NSArray *)dataSetFilesNames withCompletion:(MSImageRecognitionCompletionBlock)completion { dispatch_async(_dispatchQueue, ^{ NSError *error = nil; MSImageRecognitionCompletionBlock blockCopy = completion ? [completion copy] : nil; if([self initTracker:&error]) { _dataSetsCount = dataSetFilesNames.count; _dataSets = new QCAR::DataSet*[_dataSetsCount]; NSInteger idx = 0; for(NSString *fileName in dataSetFilesNames) { QCAR::DataSet *dataSet = [self loadBundleDataSetWithName:fileName]; if (dataSet == NULL) { NSLog(@"Failed to load datasets"); error = [self errorWithCode:E_LOADING_TRACKERS_DATA]; break; } if (![self activateDataSet:dataSet]) { NSLog(@"Failed to activate dataset"); error = [self errorWithCode:E_LOADING_TRACKERS_DATA]; break; } _dataSets[idx++] = dataSet; } if(error) { if(_dataSets) { delete[] _dataSets; } } } MSDispatchMain(^{ if(blockCopy) blockCopy(error == nil, error); }); }); } - (BOOL)initTracker:(NSError **)error { NSParameterAssert(error); QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); QCAR::Tracker* trackerBase = trackerManager.initTracker(QCAR::ImageTracker::getClassType()); if (!trackerBase){ trackerBase = trackerManager.getTracker(QCAR::ImageTracker::getClassType()); } if (!trackerBase) { NSLog(@"Failed to initialize ImageTracker."); *error = [self errorWithCode:E_INIT_TRACKERS]; return NO; } if(_isCloudRecognition) { QCAR::TargetFinder* targetFinder = static_cast<QCAR::ImageTracker*>(trackerBase)->getTargetFinder(); if (!targetFinder) { NSLog(@"Failed to get target finder."); *error = [self errorWithCode:E_INIT_TRACKERS]; return NO; } } NSLog(@"Successfully initialized ImageTracker."); return YES; } - (void)deinitTrackers { QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); trackerManager.deinitTracker(QCAR::ImageTracker::getClassType()); } - (BOOL)startTrackers { QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); QCAR::Tracker* tracker = trackerManager.getTracker(QCAR::ImageTracker::getClassType()); if(tracker == 0) { return NO; } tracker->start(); if(_isCloudRecognition) { QCAR::ImageTracker* imageTracker = static_cast<QCAR::ImageTracker*>(tracker); QCAR::TargetFinder* targetFinder = imageTracker->getTargetFinder(); assert (targetFinder != 0); targetFinder->startRecognition(); } return YES; } - (BOOL)stopTrackers { QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); QCAR::ImageTracker* imageTracker = static_cast<QCAR::ImageTracker*>(trackerManager.getTracker(QCAR::ImageTracker::getClassType())); if (!imageTracker) { NSLog(@"ERROR: failed to get the tracker from the tracker manager"); return NO; } imageTracker->stop(); DLog(@"INFO: successfully stopped tracker"); if(_isCloudRecognition) { // Stop cloud based recognition: QCAR::TargetFinder* targetFinder = imageTracker->getTargetFinder(); assert(targetFinder != 0); targetFinder->stop(); DLog(@"INFO: successfully stopped cloud tracker"); } return YES; } #pragma mark - DataSet loading - (BOOL)loadCloudTrackerWithAccessKey:(NSString *)accessKey andPrivateKey:(NSString *)privateKey error:(NSError **)error { QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); QCAR::ImageTracker* imageTracker = static_cast<QCAR::ImageTracker*>(trackerManager.getTracker(QCAR::ImageTracker::getClassType())); if (imageTracker == NULL) { NSLog(@">doLoadTrackersData>Failed to load tracking data set because the ImageTracker has not been initialized."); *error = [self errorWithCode:E_LOADING_TRACKERS_DATA]; return NO; } // Initialize visual search: QCAR::TargetFinder* targetFinder = imageTracker->getTargetFinder(); if (targetFinder == NULL) { NSLog(@">doLoadTrackersData>Failed to get target finder."); *error = [self errorWithCode:E_LOADING_TRACKERS_DATA]; return NO; } NSDate *start = [NSDate date]; // Start initialization: if (targetFinder->startInit([accessKey cStringUsingEncoding:NSUTF8StringEncoding], [privateKey cStringUsingEncoding:NSUTF8StringEncoding])) { targetFinder->waitUntilInitFinished(); NSDate *methodFinish = [NSDate date]; NSTimeInterval executionTime = [methodFinish timeIntervalSinceDate:start]; NSLog(@"waitUntilInitFinished Execution Time: %f", executionTime); } int resultCode = targetFinder->getInitState(); if ( resultCode != QCAR::TargetFinder::INIT_SUCCESS) { if (resultCode == QCAR::TargetFinder::INIT_ERROR_NO_NETWORK_CONNECTION) { NSLog(@"CloudReco error:QCAR::TargetFinder::INIT_ERROR_NO_NETWORK_CONNECTION"); } else if (resultCode == QCAR::TargetFinder::INIT_ERROR_SERVICE_NOT_AVAILABLE) { NSLog(@"CloudReco error:QCAR::TargetFinder::INIT_ERROR_SERVICE_NOT_AVAILABLE"); } else { NSLog(@"CloudReco error:%d", resultCode); } int initErrorCode = (resultCode == QCAR::TargetFinder::INIT_ERROR_NO_NETWORK_CONNECTION ? QCAR::TargetFinder::UPDATE_ERROR_NO_NETWORK_CONNECTION : QCAR::TargetFinder::UPDATE_ERROR_SERVICE_NOT_AVAILABLE); *error = [self cloudRecognitionErrorForCode:initErrorCode]; return NO; } else { NSLog(@"cloud target finder initialized"); return YES; } } - (QCAR::DataSet *)loadBundleDataSetWithName:(NSString *)dataFile { DLog(@"loadImageTrackerDataSet (%@)", dataFile); QCAR::DataSet * dataSet = NULL; QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); QCAR::ImageTracker* imageTracker = static_cast<QCAR::ImageTracker*>(trackerManager.getTracker(QCAR::ImageTracker::getClassType())); if (NULL == imageTracker) { NSLog(@"ERROR: failed to get the ImageTracker from the tracker manager"); return NULL; } else { dataSet = imageTracker->createDataSet(); if (NULL != dataSet) { DLog(@"INFO: successfully loaded data set"); // Load the data set from the app's resources location if (!dataSet->load([dataFile cStringUsingEncoding:NSASCIIStringEncoding], QCAR::DataSet::STORAGE_APPRESOURCE)) { NSLog(@"ERROR: failed to load data set"); imageTracker->destroyDataSet(dataSet); dataSet = NULL; } } else { NSLog(@"ERROR: failed to create data set"); } } return dataSet; } - (BOOL)activateDataSet:(QCAR::DataSet *)theDataSet { BOOL success = NO; // Get the image tracker: QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); QCAR::ImageTracker* imageTracker = static_cast<QCAR::ImageTracker*>(trackerManager.getTracker(QCAR::ImageTracker::getClassType())); if (imageTracker == NULL) { NSLog(@"Failed to load tracking data set because the ImageTracker has not been initialized."); } else { // Activate the data set: if (!imageTracker->activateDataSet(theDataSet)) { NSLog(@"Failed to activate data set."); } else { NSLog(@"Successfully activated data set."); success = YES; } } return success; } - (BOOL)deactivateDataSets { // Get the image tracker: QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); QCAR::ImageTracker* imageTracker = static_cast<QCAR::ImageTracker*>(trackerManager.getTracker(QCAR::ImageTracker::getClassType())); if (imageTracker == NULL) { NSLog(@"Failed to unload tracking data set because the ImageTracker has not been initialized."); return NO; } if(_isCloudRecognition) { QCAR::TargetFinder* finder = imageTracker->getTargetFinder(); finder->deinit(); } else { for(int i = 0; i < _dataSetsCount; i++) { QCAR::DataSet *dataSet = _dataSets[i]; if(dataSet != NULL) { if (imageTracker->deactivateDataSet(dataSet)) { DLog(@"Dataset was deactivated succesfullty"); if(imageTracker->destroyDataSet(dataSet)) { DLog(@"Dataset was destroyed succesfullty"); } else { NSLog(@"Failed to destroy dataset"); } } else { NSLog(@"Failed to deactivate data set."); } } } } return YES; } #pragma mark - Camera setup // Configure QCAR with the video background size - (void)configureVideoBackgroundWithViewWidth:(float)viewWidth andHeight:(float)viewHeight { // Get the default video mode QCAR::CameraDevice& cameraDevice = QCAR::CameraDevice::getInstance(); QCAR::VideoMode videoMode = cameraDevice.getVideoMode(QCAR::CameraDevice::MODE_DEFAULT); // Configure the video background QCAR::VideoBackgroundConfig config; config.mEnabled = true; config.mSynchronous = true; config.mPosition.data[0] = 0.0f; config.mPosition.data[1] = 0.0f; // Determine the orientation of the view. Note, this simple test assumes // that a view is portrait if its height is greater than its width. This is // not always true: it is perfectly reasonable for a view with portrait // orientation to be wider than it is high. The test is suitable for the // dimensions used in this sample if (UIInterfaceOrientationIsPortrait(_interfaceOrientation)) { // --- View is portrait --- // Compare aspect ratios of video and screen. If they are different we // use the full screen size while maintaining the video's aspect ratio, // which naturally entails some cropping of the video float aspectRatioVideo = (float)videoMode.mWidth / (float)videoMode.mHeight; float aspectRatioView = viewHeight / viewWidth; if (aspectRatioVideo < aspectRatioView) { // Video (when rotated) is wider than the view: crop left and right // (top and bottom of video) // --============-- // - = = _ // - = = _ // - = = _ // - = = _ // - = = _ // - = = _ // - = = _ // - = = _ // --============-- config.mSize.data[0] = (int)videoMode.mHeight * (viewHeight / (float)videoMode.mWidth); config.mSize.data[1] = (int)viewHeight; } else { // Video (when rotated) is narrower than the view: crop top and // bottom (left and right of video). Also used when aspect ratios // match (no cropping) // ------------ // - - // - - // ============ // = = // = = // = = // = = // = = // = = // = = // = = // ============ // - - // - - // ------------ config.mSize.data[0] = (int)viewWidth; config.mSize.data[1] = (int)videoMode.mWidth * (viewWidth / (float)videoMode.mHeight); } } else { // --- View is landscape --- float temp = viewWidth; viewWidth = viewHeight; viewHeight = temp; // Compare aspect ratios of video and screen. If they are different we // use the full screen size while maintaining the video's aspect ratio, // which naturally entails some cropping of the video float aspectRatioVideo = (float)videoMode.mWidth / (float)videoMode.mHeight; float aspectRatioView = viewWidth / viewHeight; if (aspectRatioVideo < aspectRatioView) { // Video is taller than the view: crop top and bottom // -------------------- // ==================== // = = // = = // = = // = = // ==================== // -------------------- config.mSize.data[0] = (int)viewWidth; config.mSize.data[1] = (int)videoMode.mHeight * (viewWidth / (float)videoMode.mWidth); } else { // Video is wider than the view: crop left and right. Also used // when aspect ratios match (no cropping) // ---====================--- // - = = - // - = = - // - = = - // - = = - // ---====================--- config.mSize.data[0] = (int)videoMode.mWidth * (viewHeight / (float)videoMode.mHeight); config.mSize.data[1] = (int)viewHeight; } } // Calculate the viewport for the app to use when rendering TagViewport viewport; viewport.posX = ((viewWidth - config.mSize.data[0]) / 2) + config.mPosition.data[0]; viewport.posY = (((int)(viewHeight - config.mSize.data[1])) / (int) 2) + config.mPosition.data[1]; viewport.sizeX = config.mSize.data[0]; viewport.sizeY = config.mSize.data[1]; self.viewport = viewport; DLog(@"VideoBackgroundConfig: size: %d,%d", config.mSize.data[0], config.mSize.data[1]); DLog(@"VideoMode:w=%dh=%d", videoMode.mWidth, videoMode.mHeight); DLog(@"width=%7.3f height=%7.3f", viewWidth, viewHeight); DLog(@"ViewPort: X,Y: %d,%d Size X,Y:%d,%d", viewport.posX,viewport.posY,viewport.sizeX,viewport.sizeY); // Set the config QCAR::Renderer::getInstance().setVideoBackgroundConfig(config); } #pragma mark - Error handling // build a NSError - (NSError *)errorWithCode:(int) code { return [NSError errorWithDomain:MSImageRecognitionSessionErrorDomain code:code userInfo:nil]; } - (void)errorWithCode:(int) code error:(NSError **) error{ if (error != NULL) { *error = [self errorWithCode:code]; } } - (NSError *)cloudRecognitionErrorForCode:(int)code { NSString *description; NSString *suggestion; switch (code) { case QCAR::TargetFinder::UPDATE_ERROR_NO_NETWORK_CONNECTION: description = @"Network Unavailable"; suggestion = @"Please check your internet connection and try again."; break; case QCAR::TargetFinder::UPDATE_ERROR_REQUEST_TIMEOUT: description = @"Request Timeout"; suggestion = @"The network request has timed out, please check your internet connection and try again."; break; case QCAR::TargetFinder::UPDATE_ERROR_SERVICE_NOT_AVAILABLE: description = @"Service Unavailable"; suggestion = @"The cloud recognition service is unavailable, please try again later."; break; case QCAR::TargetFinder::UPDATE_ERROR_UPDATE_SDK: description = @"Unsupported Version"; suggestion = @"The application is using an unsupported version of Vuforia."; break; case QCAR::TargetFinder::UPDATE_ERROR_TIMESTAMP_OUT_OF_RANGE: description = @"Clock Sync Error"; suggestion = @"Please update the date and time and try again."; break; case QCAR::TargetFinder::UPDATE_ERROR_AUTHORIZATION_FAILED: description = @"Authorization Error"; suggestion = @"The cloud recognition service access keys are incorrect or have expired."; break; case QCAR::TargetFinder::UPDATE_ERROR_PROJECT_SUSPENDED: description = @"Authorization Error"; suggestion = @"The cloud recognition service has been suspended."; break; case QCAR::TargetFinder::UPDATE_ERROR_BAD_FRAME_QUALITY: description = @"Poor Camera Image"; suggestion = @"The camera does not have enough detail, please try again later"; break; default: description = @"Unknown error"; suggestion = [NSString stringWithFormat:@"An unknown error has occurred (Code %d)", code]; break; } return [NSError errorWithDomain:MSImageRecognitionSessionErrorDomain code:code userInfo:@{NSLocalizedDescriptionKey : description, NSLocalizedRecoverySuggestionErrorKey : suggestion}]; } #pragma mark - QCAR callback - (void) QCAR_onUpdate:(QCAR::State *) state { if(_isCloudRecognition) { QCAR::TrackerManager& trackerManager = QCAR::TrackerManager::getInstance(); QCAR::ImageTracker* imageTracker = static_cast<QCAR::ImageTracker*>(trackerManager.getTracker(QCAR::ImageTracker::getClassType())); QCAR::TargetFinder* finder = imageTracker->getTargetFinder(); // Check if there are new results available: const int statusCode = finder->updateSearchResults(); if (statusCode < 0) { // Show a message if we encountered an error: NSLog(@"update search result failed:%d", statusCode); if (statusCode == QCAR::TargetFinder::UPDATE_ERROR_NO_NETWORK_CONNECTION) { //TODO } } else if (statusCode == QCAR::TargetFinder::UPDATE_RESULTS_AVAILABLE) { for (int i = 0; i < finder->getResultCount(); ++i) { const QCAR::TargetSearchResult* result = finder->getResult(i); // Check if this target is suitable for tracking: if (result->getTrackingRating() > 0) { // Create a new Trackable from the result: QCAR::Trackable* newTrackable = finder->enableTracking(*result); if (newTrackable != 0) { // Avoid entering on ContentMode when a bad target is found // (Bad Targets are targets that are exists on the CloudReco database but not on our own book database) NSLog(@"Successfully created new trackable '%s' with rating '%d'.", newTrackable->getName(), result->getTrackingRating()); NSString *name = [[NSString alloc] initWithUTF8String:newTrackable->getName()]; if(name.length) { DLog(@"recognized image with name: %@", name); MSDispatchMain(^{ self.recognitionBlock(name); }); } } else { NSLog(@"Failed to create new trackable."); } } } } } else { for (int i = 0; i < state->getNumTrackableResults(); ++i) { // Get the trackable const QCAR::TrackableResult* result = state->getTrackableResult(i); const QCAR::Trackable& trackable = result->getTrackable(); NSString *name = [[NSString alloc] initWithUTF8String:trackable.getName()]; if(name.length) { DLog(@"recognized image with name: %@", name); MSDispatchMain(^{ self.recognitionBlock(name); }); } } } } //////////////////////////////////////////////////////////////////////////////// // Callback function called by the tracker when each tracking cycle has finished void VuforiaApplication_UpdateCallback::QCAR_onUpdate(QCAR::State& state) { if (__sharedInstance != nil) { [__sharedInstance QCAR_onUpdate:&state]; } } @end #endif
ViewControllerでは、最初にデータセットをロードする必要があります(もう少し詳しく説明します)。 これを行うには、次を実行します。
[[MSImageRecognitionSession sharedSession] loadBundledDataSets:[self.class dataSets] withCompletion:^(BOOL success, NSError *error) { MSImageRecognitionViewController *strongSelf = weakSelf; if(!strongSelf || !_isAppeared) return; [strongSelf onLoadARDoneWithResult:success error:error]; }];
そして、すべてがロードされた場合の最終設定:
- (void)onLoadARDoneWithResult:(BOOL)success error:(NSError *)error { if(success) { __weak MSImageRecognitionViewController *weakSelf = self; [[MSImageRecognitionSession sharedSession] startAR:^(BOOL success, NSError *error) { weakSelf.activityIndicator.hidden = YES; weakSelf.cloudRecognitionSwitch.enabled = YES; if(!_isAppeared) return; if(error) { [weakSelf showAlertWithError:error]; } } recognitionBlock:^(NSString *recognizedName) { MSImageRecognitionViewController *strongSelf = weakSelf; if(!strongSelf || !_isAppeared) return; [MSFlurryAnalytics sendScreenName:kFlurryScreenSuccessRecognition]; performCompletionBlockWithData(strongSelf.recognizeCompletion, YES, nil, recognizedName); [strongSelf.presentingViewController dismissViewControllerAnimated:YES completion:nil]; }]; } if(error) { [self showAlertWithError:error]; self.activityIndicator.hidden = YES; self.cloudRecognitionSwitch.enabled = YES; self.view.backgroundColor = nil; } }
これで、技術統合が終了します。 次に、データ編成について説明します。
Vuforiaは生の写真をマーカーとして使用できません。 それらを前処理してデータセットに形成する必要があります。その後、データセットをアプリケーションバンドルに入れてロードします。 データセットを作成するには、ポータルに移動する必要があります
開発->ターゲットマネージャー->作成\データベースの選択
そして、すべての写真を追加します。 その後、「 データベースのダウンロード」をクリックします。 出力には、説明付きのxmlと強調表示されたキーポイント付きのbinの2つのファイルが表示されます。
データベース内のロゴとチームを接続するために、タグとしての各ロゴにはデータベース内のチームIDがあります。 したがって、画像を見つけると、Vuforiaは、次のようなタグを持つターゲットが見つかったことを通知します(メソッド- (void)QCAR_onUpdate: MSImageRecognitionSessionクラスの(QCAR :: State *)状態 )。 このタグをデータベースに登り、必要なコマンドを取得します。
今日は以上です。 次回は、Today ExtensionとWatch Extensionをアプリケーションに追加した方法を説明します。
Github: github.com/DataArt/FootballClubsRecogniser/tree/master/iOS
AppStore: itunes.apple.com/us/app/football-clubs-recognizer/id658920969?mt=8