How to design a car suspension control unit
Good afternoon! As you know, roads in Russia are far from the best, and therefore, the development and programming of active suspension blocks for cars that adapt to the type of road surface by choosing an operating mode or algorithm is still relevant.
I will give a number of electrical diagrams and recommendations.
First you need to decide on the type of microprocessor - a microcontroller. I advise you to choose a modern fast 32-bit STM microcontroller or similar - the best option from Infineon.

One of the most important factors and the key to the reliability of the circuit is the correct design of the power source and harness. I advise you to use microprocessor-based multi-channel LDO controllers with a serial SPI bus to control power modes, emergency shutdown and monitoring (Power good).

Next, we move on to the development of the “power unit”. We design a control scheme for elastic elements - dampers:
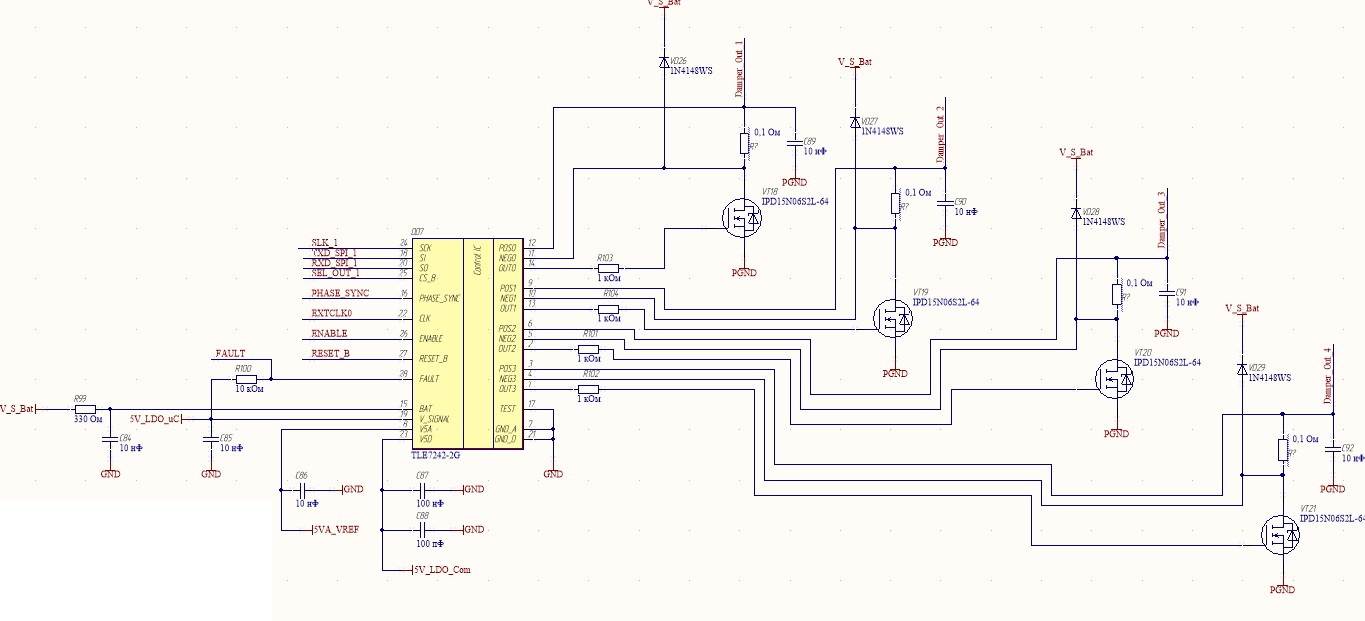
It is better to choose specialized chips certified for the automotive industry, for example, TLE7242 Infineon. It contains the MOSFET control circuits for overloading the Drain-Source output circuits.
For air pump control valves, smart keys should be used with built-in protection against temperature rise, load short circuit, overvoltage:
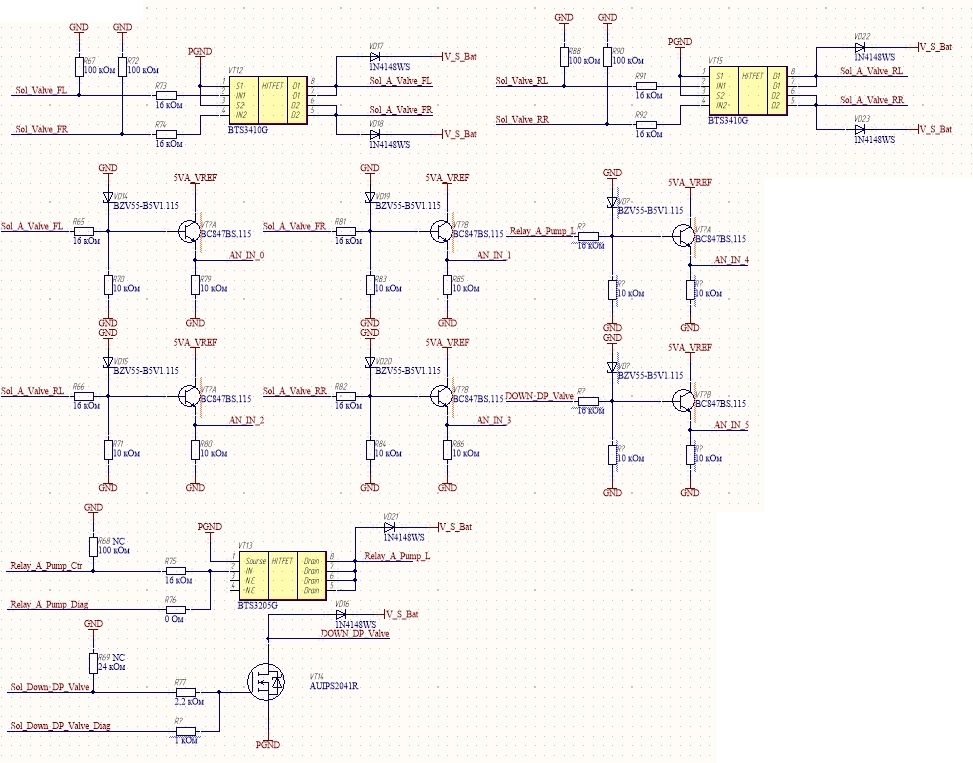
and Air_Valve_Pump air pump valves:

After designing the “power unit”, we proceed to the development of electrical circuits for connecting acceleration sensors. We choose the serial data transmission protocol via the I2C interface due to the comparative simplicity of programming, a two-wire line and a low frequency of information transfer. Be sure to make protection from the input voltage of the + 12V network and the polarity reversal by pulling it to the + 5V, + 12V and TVS-diode power circuits. I used Analog Devices multiplexers for sequential channel switching:

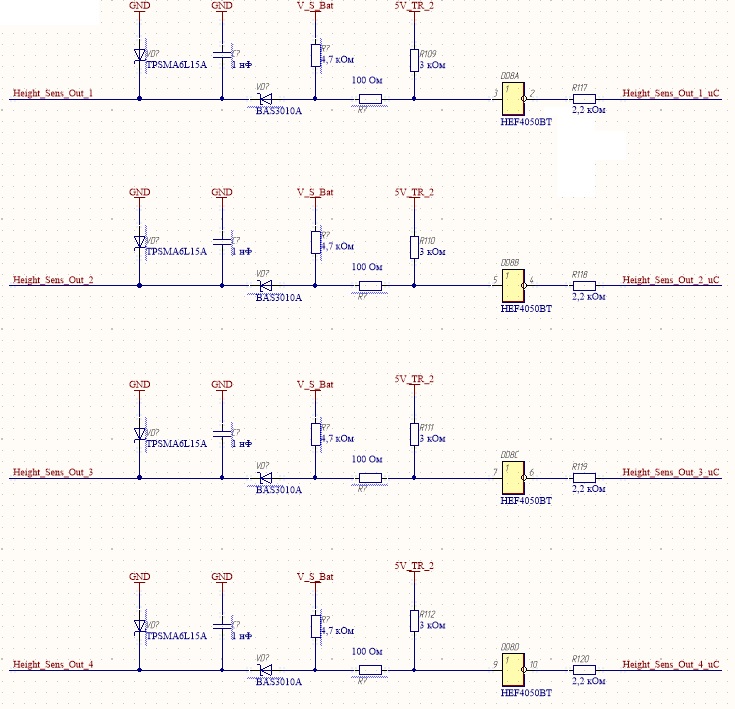
The connection diagram of the height sensors is quite simple, the microcontroller reads information on the I / O pins on the rising edge:
To configure and calibrate the unit, two independent CAN transceivers are used, made on TLE6250 chips with built-in ESD protection. To protect the differential transmission line, I additionally installed PESD2CAN suppressors.
A few words about block programming. The source code is written in C for communication between nodes at a low level and communication protocols: SPI, I2C, CAN. To control the block from the top level, the main variables are translated by the MatLab & Simulink program through the C compiler and the built-in functions of the mathematical package.
I will give a number of electrical diagrams and recommendations.
First you need to decide on the type of microprocessor - a microcontroller. I advise you to choose a modern fast 32-bit STM microcontroller or similar - the best option from Infineon.
One of the most important factors and the key to the reliability of the circuit is the correct design of the power source and harness. I advise you to use microprocessor-based multi-channel LDO controllers with a serial SPI bus to control power modes, emergency shutdown and monitoring (Power good).
Next, we move on to the development of the “power unit”. We design a control scheme for elastic elements - dampers:
It is better to choose specialized chips certified for the automotive industry, for example, TLE7242 Infineon. It contains the MOSFET control circuits for overloading the Drain-Source output circuits.
For air pump control valves, smart keys should be used with built-in protection against temperature rise, load short circuit, overvoltage:
and Air_Valve_Pump air pump valves:
After designing the “power unit”, we proceed to the development of electrical circuits for connecting acceleration sensors. We choose the serial data transmission protocol via the I2C interface due to the comparative simplicity of programming, a two-wire line and a low frequency of information transfer. Be sure to make protection from the input voltage of the + 12V network and the polarity reversal by pulling it to the + 5V, + 12V and TVS-diode power circuits. I used Analog Devices multiplexers for sequential channel switching:
The connection diagram of the height sensors is quite simple, the microcontroller reads information on the I / O pins on the rising edge:
To configure and calibrate the unit, two independent CAN transceivers are used, made on TLE6250 chips with built-in ESD protection. To protect the differential transmission line, I additionally installed PESD2CAN suppressors.
A few words about block programming. The source code is written in C for communication between nodes at a low level and communication protocols: SPI, I2C, CAN. To control the block from the top level, the main variables are translated by the MatLab & Simulink program through the C compiler and the built-in functions of the mathematical package.
All Articles