Lively multi-colored jelly: material-level decision making without a CPU

Anything can be an inspiration for scientists. And if we talk about representatives of flora and fauna, then they are leaders in the lists of muses that inspired great minds to create a wide variety of devices, machines and whole technologies. Today we will get acquainted with a study inspired by a creature, a “handshake” with which it would take some time - an octopus. Scientists from the University of North Carolina decided to create a device that, like the limbs of an octopus, will be able to process information and make decisions at the material level and without a centralized computer. What does this device consist of, what functions can it already perform, and what are the prospects for “soft tactile logic”? We learn about this from the report of the research group. Go.
Study basis
Octopus is the most savvy invertebrate mollusk from the order of cephalopods. The soft body of the octopus is equipped with eight tentacles, on which there are special suction cups necessary for fixing to the surface, holding the prey and tactile study of the environment. In addition, there are also taste buds on the tentacles, which allow the octopus to determine the edibility of what it touches (it would probably be convenient to choose products on the market).

The tentacles of the octopus are also unique in that 2/3 of all neurons of its body are located in them, which allows the tentacles to act independently, i.e. no signal from the brain. It's funny that the "hands" of the octopus are so autonomous that it brings him some inconvenience. The fact is that our eight-armed hero cannot accurately determine the position of his limbs by sensations, but only by direct observation of his tentacles. This is due to the fact that the octopus does not have full stereo-prediction, i.e. the ability to recognize objects by touch (their shape, size, etc.). The octopus can feel separate sections of the texture of the object, but cannot assemble this puzzle into a single picture. In other words, he knows what movements were made by one or another hand only if he saw it with his own eyes. Of course, this sometimes causes inconvenience, but if the octopuses could speak, they would hardly complain.
Scientists in this “manual” autonomy saw a future and decided to realize the anatomical feature of an octopus using technology. In their work, they describe a small and fairly simple (for now) device made of silicone and molten metal chains embedded in it, called by scientists “soft tactile logic” ( soft tactile logic ).
The main materials for the device are a mixture of low-melting gallium (Ga, 75% of the total mass) and indium (In, 25% of the total mass), as well as an elastomer polydimethylsiloxane (PDMS).
The basic principle of this prototype is Joule heating, when heat is generated by the flow of electric current. Using this effect, which is realized precisely by liquid metal (melting point 15.7 ° C) inside the elastomer, it is possible to realize a color change of the prototype due to the response of the introduced pigments.
Thus, there is a soft and sufficiently elastic device that changes color in response to pressure or stretching. Therefore, this process proceeds without the participation of any control center, but directly in the material of the prototype.
Research results
Scientists note that the color change was chosen for this prototype for a reason: firstly, at this stage of technology implementation this is a great and easy way to demonstrate the basic principles of the device; secondly, color change is present both in nature and in technology. Representatives of the animal world of the planet Earth use color change to disguise themselves from predators, to demonstrate their toxicity, to search for a partner and even to show emotions, which is especially common for people (redder with embarrassment, pale with fear, etc.). In the tech world, color is also important, since changing the color of individual pixels, clusters of pixels, and the whole picture on the monitor is a human-machine interaction method.
However, there is a difference between animals and technology. Displays often use “active strategies” based on light generation, and animals use “passive strategies” when external light is reflected off the surface.
According to scientists, a passive strategy for changing pigmentation can be implemented in a variety of ways: thermochromic liquid crystals, colored liquids pumped through microchannels, interference in thin films, dynamic photonic crystals and plasmon structures, magnetically sensitive materials and electrochromic molecules. In this work, thermochromic pigments were used.
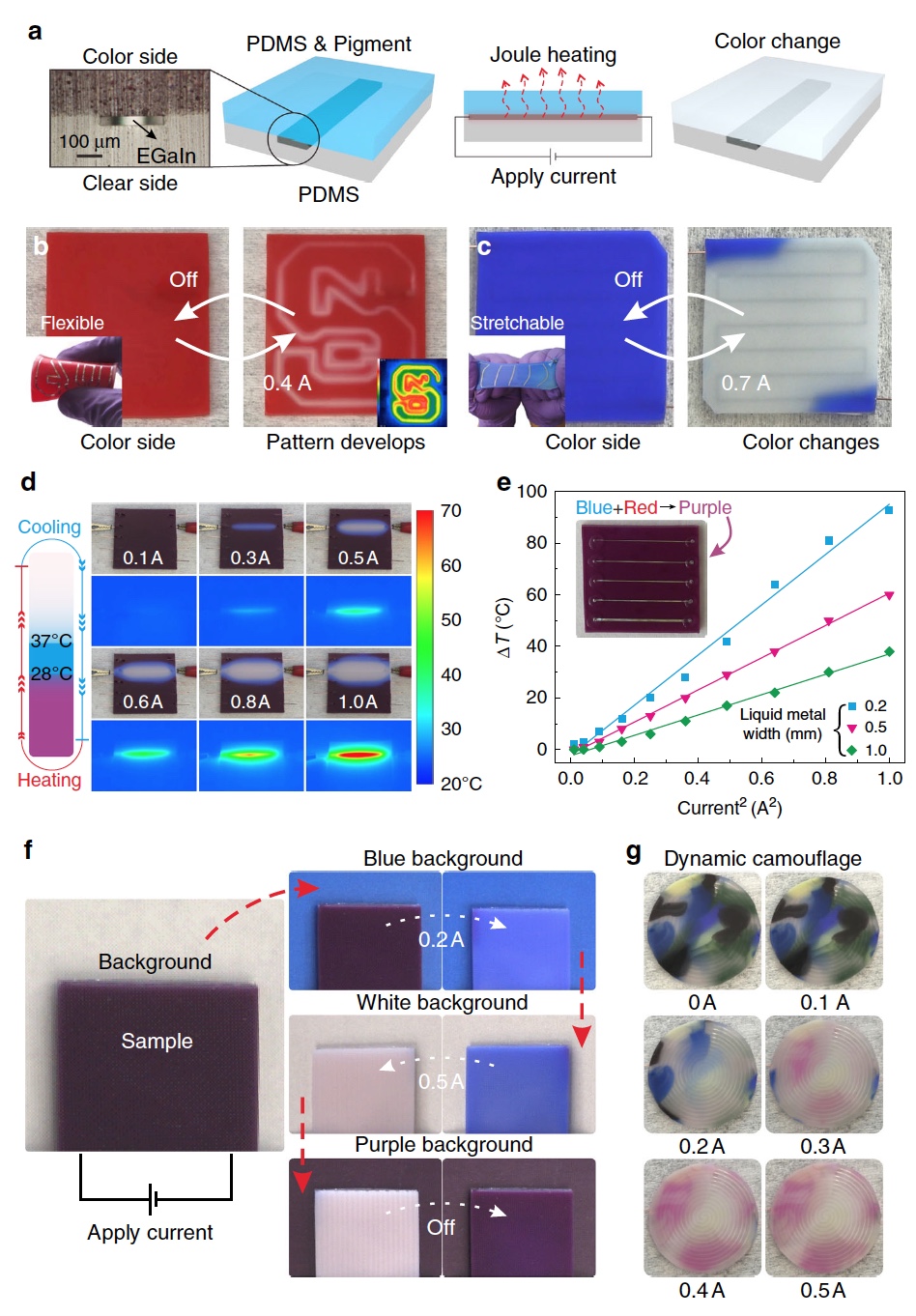
Image No. 1
Figure 1a shows the basic platform of the prototype: liquid metal, located between two layers of PDMS, one of which is transparent, and the other contains thermochromic particles. A transparent layer is not needed for the operation of the devices, but only allows you to carefully consider the dynamics of liquid metal in the research process. The current passing through the liquid metal generates Joule heating, and thermochromic particles change their color above critical temperatures due to rearrangement of the molecular structure.
To demonstrate this principle, the thermosensitive substance TF-R1 is pink-red. This version of the device immediately shows a red color, but when the temperature reaches 28 ° C and above, the color changes to white (video below).
Change from red to white when the temperature reaches 28 ° C.
The IR image (inset in 1b ) shows regions of elevated temperature corresponding to the observed visual picture of color changes ( 1b ).
Naturally, a similar principle can be implemented with any color. For example, scientists used blue thermochroms, and the device retained a blue color at room temperature, becoming white only at 37 ° C and above ( 1s ).
Blue color changes to white when heated to 37 ° C and above.
In areas where the color does not change, copper wires are present. And since the specific resistance of copper (1.68 x 10 −6 Ω · cm) is lower than the specific resistance of liquid metal (29.4 x 10 −6 Ω · cm), less Joule heating is generated, which does not change color in the presence of copper.
Given that different thermochromic substances have different response (activation) temperatures, mixing them in one device creates a new system that displays three colors ( 1d ).
The temperature dynamics at 1d also shows how colors change from one to the other: magenta to blue (T <28 ° C, since there is no red), and then to white (T> 37 ° C, there is no blue and red). In such a device, the width of the liquid metal channel is 0.4 mm.
Color change when current changes.
The process itself is quite understandable, but it was still necessary to establish at what indicators of power a color change occurs. To this end, scientists have suggested that during Joule heating, power ( P ) is generated based on the applied current ( I ) and the resistance of the liquid metal ( R ) in accordance with P = I 2 R.
Since the resistance is inversely proportional to the width of the channel, experiments were carried out in which the geometry of the device always remained the same, but the width of the channels changed (insert at 1e ). As can be seen on the graph 1e , the temperature is a linear function of the square of the current. For a given current, a decrease in the width of the liquid metal increased the temperature change due to an increase in Joule heating. That is, an increase in current not only increases the maximum surface temperature, but also increases the region experiencing elevated surface temperatures.
Measurements were taken of the width of the color change region of each device to establish a relationship between the current and the width of the color change region. The increase in current density (due to an increase in current or due to a decrease in the width of the liquid metal) caused the expansion of the areas of color change.
Changing the color of pigmentation in the animal kingdom is most often associated with camouflage, i.e. with the ability to visually blend with the environment. The device under investigation is also capable of this.
Figure 1f shows the process of changing the color of the device in accordance with the background. This effect is achieved by adjusting the current in the channels of the liquid metal.
Adaptive color change (camouflage).
You can also achieve not only the monochromatic color of the device, but different options for combining different colors ( 1g ). When some colors begin to fade with increasing current, others become brighter.
Dynamic change adaptive color change.
As we already understood, a huge role in the success of the prototype is played by an unusual type of conductor - liquid metal, which is able to change its shape, i.e. be elastic, which allows to obtain dynamic properties of Joule heating due to deformations. In other words, such a system can thermochromically report on the state of the device (pressure, tension, etc.).
Researchers compare this effect with mechanochemistry in soft robotics, when the color change corresponds to a certain level of deformation, warning about a possible breakdown. However, in the case of a liquid-metal conductor, no chemistry is needed, and the number of colorimetric outputs is much larger. Given that the color change, although due to the thermal effect, is still activated mechanically, scientists called this process thermomechanochromism.
How does this all work? Researchers give a simple example - the tension of the liquid metal channel. In this situation, the channel length increases, but the cross-sectional area decreases. The consequence of this is an increase in resistance and, consequently, an increase in Joule heating ( 2a ).
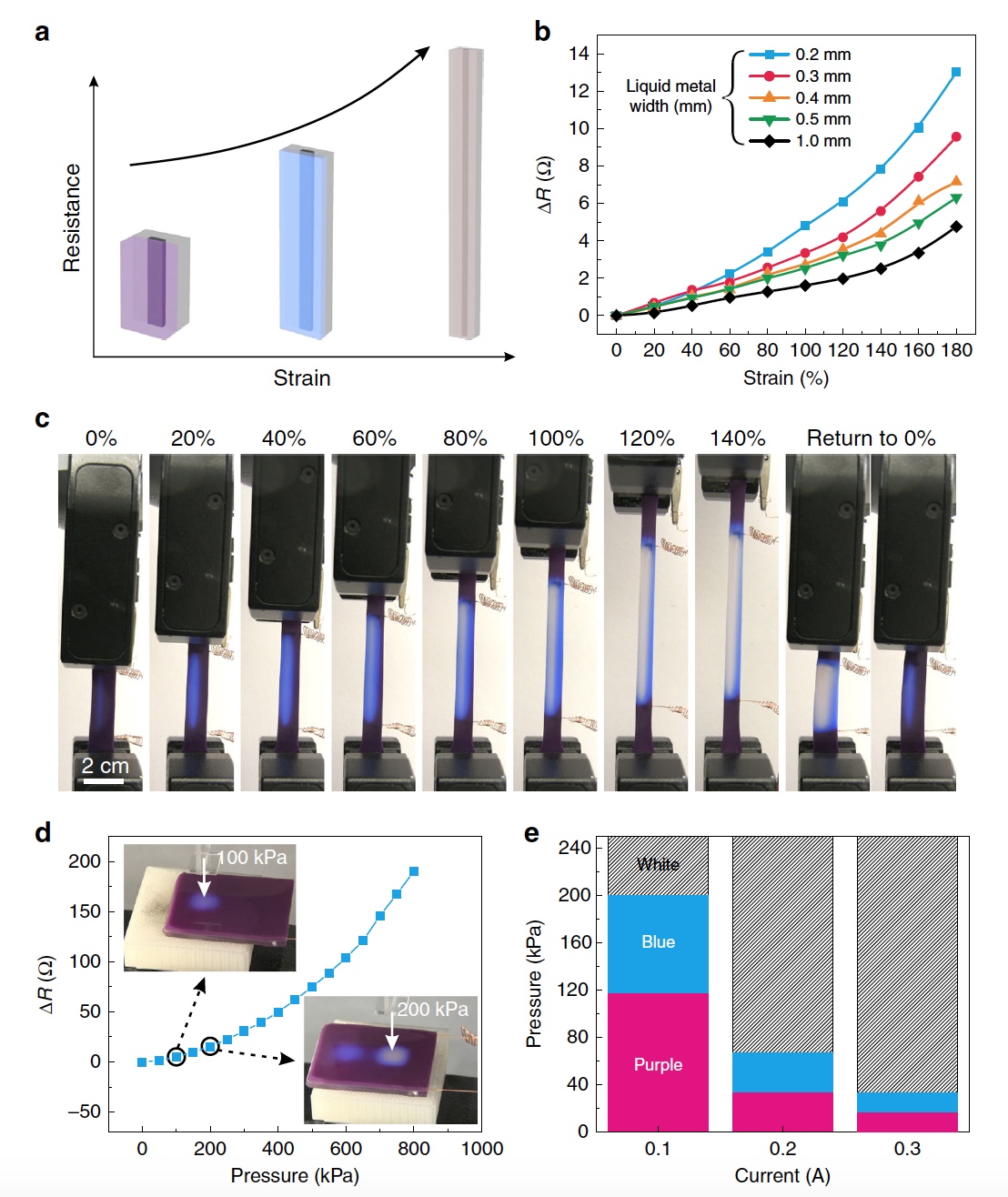
Image No. 2
Deformation ( ɛ = ( L - L 0 ) L 0-1 , where L is the length) leads to an increase in the initial resistance (R 0 ) in accordance with the following formula:
R = R 0 ( ɛ +1) 2 .
Given this theoretical basis, the researchers created a sensor that changes color in response to voltage. As expected, the resistance of the liquid metal channel increases with elongation ( 2b ). At the moment of stretching, a direct current of 0.2 A was applied (video below).
Demonstration of mechanochromy.
At zero deformation, this current is not enough to activate a color change, but when the channel is elongated (actual deformation), the Joule heating begins to increase, leading to a color change.
Image 2c shows images of liquid metal channels 0.2 mm thick at different voltages. The device changes color from magenta to blue due to the lack of red (at temperatures> 28 ° C) and additionally switches from blue to white at 60% deformation due to the activation of blue thermochromic components. Then the device again turns purple when it returns to 0% deformation due to reversible thermochromism.
A similar effect can be used to determine the degree of deformation and its localization by evaluating the color and area of color changes on the device.
In order to understand how color changes under tension and, as a result, to be able to adjust the color reaction to deformation, scientists combined two formulas important for this work ( P = I 2 R and R = R 0 ( ɛ +1) 2 ) and obtained the following :
dP / d ( ɛ +1) = 2 I 2 R 0 ( ɛ +1).
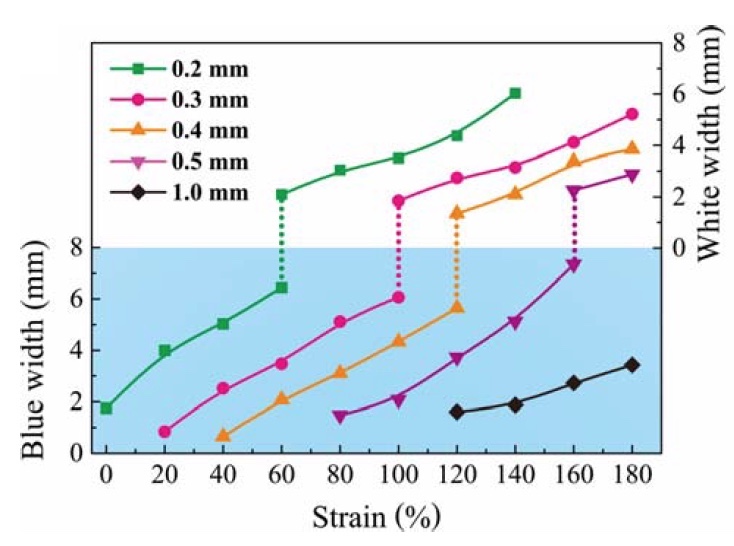
This formula shows that the change in power ( P ) with deformation ( ɛ ) depends on the current ( I , in these experiments it is constant) and on the initial resistance ( R 0 ). It turns out that the channel with a higher initial resistance will be more sensitive to stretching. To confirm this theory, the researchers created a linear conductor with a length of 35 mm, a height of 0.05 mm and a width of X mm (where X was 0.2, 0.3, 0.4, 0.5 and 1.0 mm), after which they measured the width of the color change region when applying direct current.
Graph of experiment results with different resistance.
As a result of the experiment, it was found that devices with a narrower liquid-metal channel change color at a lower resistance. Conversely, the widest device never turns white even at 180% deformation due to its low initial resistance. And this suggests that you can configure the device by adjusting the initial resistance so that the color change occurs at a certain voltage value.
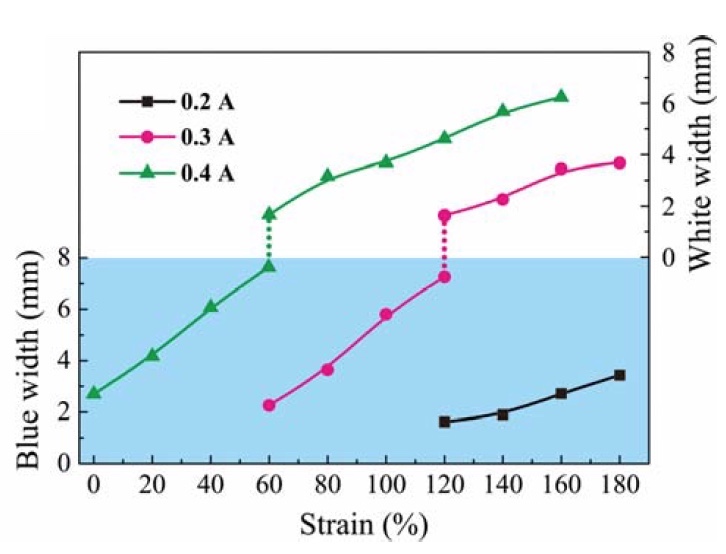
In addition to resistance, another important factor in color change is current. During the experiment, a current of 0.2, 0.3, and 0.4 A was applied to a device with a channel 1 mm wide.
Graph of the results of an experiment with different currents.
The device does not change color to white when elongated using 0.2 A. After increasing the current to 0.4 A, the device can change color at low deformation (≈50%). This observation confirms that current can be used to control deformation at the points of color change.
In addition to tension, there are a number of other types of deformation, one of which is compression. Pressing the device also leads to a change in the size of the liquid metal channels. A change in the transverse area of the channel at this moment can cause local color changes by local changes in resistance (if the current is constant, of course).
To verify this, an experiment was conducted in which a current of 0.1 A was applied to the device and a pressure of 100, 200, 300 and 400 kPa was applied (the time interval between pressures was 15 seconds) over an area of 1x1 cm. As expected, the color changed exactly at the place of application of pressure.
The initial blue color turned purple at a pressure of 100 kPa, and then white color appeared at 200 kPa (video below).
Demonstration of the response of the device to pressure.
Next, the scientists decided to demonstrate how the current and width of the liquid metal channel affect the color change during compression. For this, a liquid metal channel was made with a length of 50 mm, a height of 0.05 mm and a width of X mm (where X = 0.2, 0.3, 0.4, 0.5 and 1.0 mm). A current of 0.1, 0.2, and 0.3 A was applied to the device with a channel 1 mm wide, after which the color change was measured as a function of pressure ( 2e ). The ranges of pressure values in which there are purple and blue colors increase with increasing current.
Researchers note that the devices shown on 2d and 2e have only one conductive channel. Thus, clicking on it leads to a local change in resistance and an increase in current density, since the current must pass through the compressed region. But you can create systems with several channels for the passage of current. This concept can be used to redistribute energy in a circuit and perform simple logical operations without using semiconductors.
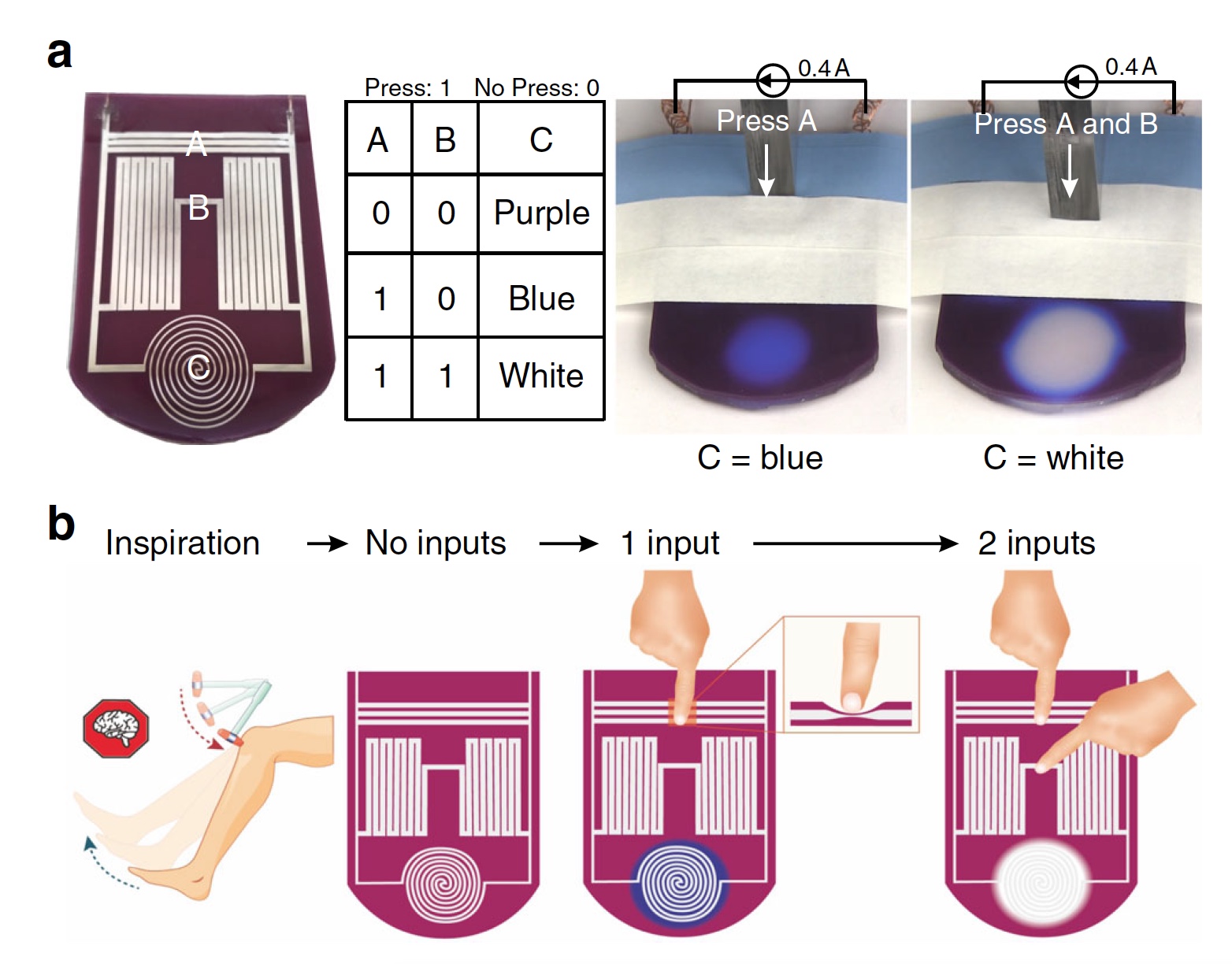
Image No. 3
To demonstrate this concept, a prototype ( 3a ) was made, consisting of two “input” areas ( A and B in the image) and one “display” area ( C in the image).
The input signal in this case is the pressure. Like the threshold voltage in a transistor, there is a threshold pressure necessary to induce enough current to cause a color change in the “display area”. Following the language of binary logic, the pressure values above the threshold are called “1”, and the values below are called “0”.
A current of 0.4 A was applied to the device and various pressure signals “1” and “0” were applied in areas A and B. In response to the signals, the display area reacted with a color change ( 3b ).
"Soft tactile logic."
These color changes occur due to the redirection of the electric current to region C based on the physical input. This simple device is a NAND-like logical operation, although the output is complicated by three output states rather than two.
Device with 10 parallel channels.
This concept can be expanded by creating parallel channels inside the device, which will allow you to redistribute the current when pressed.
The use of "soft tactile logic" in electronic devices.
In addition to Joule heating, redistributed current can activate certain circuit elements (LEDs in the video above) or mechanical elements (fan in the video below).
The use of "soft tactile logic" in mechanical devices.
For a more detailed acquaintance with the nuances of the study, I recommend that you look into the report of scientists and additional materials to it.
Epilogue
In this study, scientists demonstrated prototype devices consisting of an elastomer with one or more conductive channels of liquid metal. The use of such channels allowed to maintain the elasticity of the device itself. The concept of changing the color of the device due to thermochromic liquid crystals was demonstrated, which responds to a change in a certain indicator (or all at once): the width of the conductive channel, the degree of deformation, current and resistance.
This device is absurdly simple and can perform certain functions without the participation of the central processor, that is, at the level of the material itself. However, this is only a prototype, which can be further improved and complicated by adding additional channels and / or thermochromic elements to expand its range of capabilities and functionality. Color change is not the only thing that a device based on the technology described above can do. Elastomers, equipping with liquid metal channels can change size, position, shape, etc. Such technology can find its application in areas such as soft robotics and prosthetics.
Decentralization of decision-making for the octopus is not new, but for man-made machines - so far this is only the future. How far this distant future depends on the success of such studies.
Friday off-top:
Practical experiments with a “soft” robotic arm (I hope the crab was not very scared).
Practical experiments with a “soft” robotic arm (I hope the crab was not very scared).
Thank you for staying with us. Do you like our articles? Want to see more interesting materials? Support us by placing an order or recommending it to your friends, a 30% discount for Habr users on a unique analog of entry-level servers that we invented for you: The whole truth about VPS (KVM) E5-2650 v4 (6 Cores) 10GB DDR4 240GB SSD 1Gbps from $ 20 or how to divide the server? (options are available with RAID1 and RAID10, up to 24 cores and up to 40GB DDR4).
Dell R730xd 2 times cheaper? Only we have 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV from $ 199 in the Netherlands! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - from $ 99! Read about How to Build Infrastructure Bldg. class c using Dell R730xd E5-2650 v4 servers costing 9,000 euros for a penny?
All Articles