NASA's Jet Propulsion Laboratory is developing a clockwork all-terrain vehicle to explore Venus.
Ancient technology inspired the creation of a future all-terrain vehicle capable of operating for years at a temperature of 500 ° C
The longest period of time that the spacecraft was able to hold out on the surface of Venus is 127 minutes. On March 1, 1982, the Soviet probe Venus-13 gently descended by parachute and was able to work for a little over two hours due to the fact that all computer components were hidden in an airtight titanium casing previously cooled in orbit. The average temperature on the surface of Venus is 464 ° C - this is more than on the surface of Mercury (the planet nearest to the Sun), and it is hot enough for ordinary electronics not to work.
Not only the temperature makes Venus an unpleasant place for computers - the pressure on the surface is 90 atmospheres, which is equivalent to the pressure at a depth of 900 m in the earth's ocean. And if you are reassured by the fact that the rains of sulfuric acid originating in the upper parts of the atmosphere of Venus do not reach the surface, then know that it is so dark (as on the cloudiest day on Earth) that the extraction of solar energy will be extremely inefficient.
Photographs of the surface from the Soviet probe Venera-13, which descended on Venus and worked there for just over two hours
The stuffy atmosphere that makes the surface of Venus so unpleasant does a terrible job of minimizing the amount of surface data that we can collect while in orbit — so it would be very, very good if there were a robot looking down there looking for everything there for us. Most of the ideas connected with the investigation of the surface of Venus are approximately in the same vein as the Soviet probes: shove the electronics inside an isolated container connected to an incredibly powerful air conditioning system, and probably working from a Stirling radioactive engine with plutonium as a fuel . Research and development of such a system will cost billions.
The traditional approach to the all-terrain vehicle for Venus is difficult, expensive and dangerous. But a team of engineers from NASA's Jet Propulsion Laboratory, JPL, located in Pasadena, pc. California came up with an innovative idea to explore the surface of Venus. If the problem is in electronics, why not get rid of it and create a mechanical all-terrain vehicle?
Having received funding from NASA's Advanced Innovative Concepts (NIAC) program, the JPL team wants to know if it is possible to build an all-terrain vehicle for the study of Venus without traditional sensors, computers and power supplies. An all-terrain vehicle- automaton for extreme conditions [Automaton Rover for Extreme Environments, AREE] could use clock gears, springs, and other mechanisms to provide most of the functionality of an all-terrain vehicle, including power, energy storage, sensing, motion, and communications — without any electronics. Give in to the heat.
The insides of the location indicator "Globus", used on the spacecraft "Sunrise"
In the electronics-overloaded world, most of us do not understand what can be accomplished with the help of mechanical computers. Two thousand years ago, plus or minus a century, the ancient Greeks designed the Anti-Hitter mechanism to calculate the position of the Sun and the Moon, show the phases of the Moon, predict eclipses, track calendar cycles, and probably show the position of five planets using a set of 30 finely tuned bronze gears driven by a shaft with a handle.
Between the 17th and 19th centuries, Blaise Pascal, Gottfried Leibniz, and Charles Babbage developed mechanical computers capable of various arithmetic calculations. Closer to the present, in the 1940s, mechanical computers were actively used for such rigidly practical purposes as controlling artillery fire and dropping bombs.
The Russians used the mechanical computer "Globus" to calculate the location of their spacecraft until 2002, but in general everything is now done on electronics. And it would be okay, but not on Venus, where the use of most electronics will be impractical.
The concept of JPL regarding AREE is to create a robot with a minimum set of electronics, and for the most part rely on mechanical systems capable of working with high temperatures for weeks, months and even years. Jonathan Sauder is a technologist and mechatronics engineer in the technology introduction group at JPL, and the head of the AREE project. We talked with him to better understand how this project started and how everything will work.
How did you come up with the idea of AREE?
Jonathan Sauder: We sat with a bunch of engineers and worked at a concurrent development meeting. During one of the coffee breaks, we talked about cool mechanisms and components, and how cool it would be to make a fully mechanical spacecraft, how it would look, and where it could be used. We realized that it would be sensible to use something similar in two places where electronics would not survive: one is Venus, since the longest we could survive on the surface of Venus is two hours, and the second is Jupiter, due to the radioactive environmental disruptive electronics.
Is it possible to build a robotic rover without electronics?
In phase I of the NIAC project, we proposed our idea to build a fully mechanical all-terrain vehicle that does not use electricity or electronics at all, and to replace all standard electronic subsystems with mechanical calculators. Starting to study this question, we realized that we could not build a traditional Curiosity-type all-terrain vehicle with a centralized processor. We needed to concentrate on a more distributed architecture, in which in one device a lot of simple mechanisms were assembled, controlling it, signaling it and telling it where to go.
First, we wanted to make a number of scientific measurements with the help of mechanics. We began to deal with this issue and realized that we could not obtain data with sufficient accuracy to create images or measure parameters such as temperature and pressure. There are various options for high-temperature electronics - based on silicon carbide and gallium - operating at high temperatures. The problem is that they are very difficult to integrate. It turned out that with their help it was impossible to organize a traditional electrical system, and nothing could be done that even came close to the requirements necessary to create an all-terrain vehicle. Therefore, we decided to create a mobile platform capable of moving, exploring new places and able to work much longer than existing systems.
Early concept AREE, with legs
How did the development of AREE start?
The main goal is to create a mobile architecture of the highest possible reliability. And the second goal is to use as much as possible simple, distributed mechanisms reacting to external influences that can direct the all-terrain vehicle across the surface of Venus. Notice that in the early images the all-terrain vehicle strongly resembled Thend Jansen 's Strandbeest, the “walking animals,” kinetic sculptures strolling along the beaches of the Netherlands. Strandbeest works with a pair of simple sensors that control the movement of the legs forward or backward, and integrated logic that helps avoid soft sand and water.
In the early stages of developing the concept, we worked directly with Jansen: he came to JPL for a two-day collaboration, and we got from him the experience gained from 30 years of work with Strandbeest. One of his first advice was giving up his legs. And, you know, when the person who created Strandbeest tells you that the all-terrain vehicle on Venus does not need legs, this means that you really need to come up with something else. The key problem is that the legs, which work perfectly on flat soft beaches, become unstable when you transfer them to a more diverse surface, for example, to an unknown Venusian environment, which increases the likelihood of a coup and damage to the all-terrain vehicle.
As a result, our architecture has moved from phase I to phase II, from a cool-looking all-terrain vehicle with legs to a less steep, but more reliable and practical version of an all-terrain vehicle that looks like a tank of the First World War.
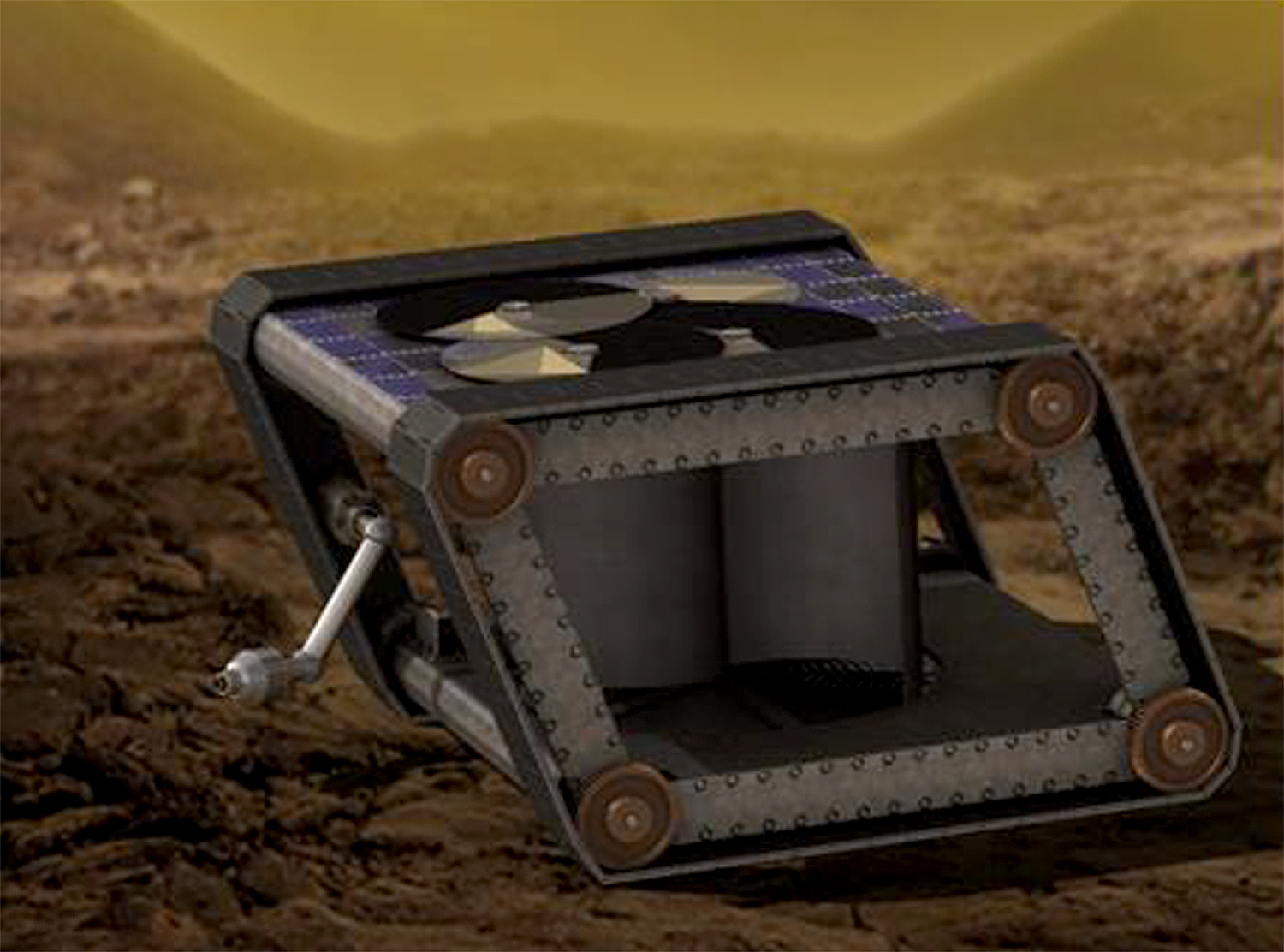
Phase II concept, with tracks and integrated wind turbine. With a possible coup all-terrain vehicle will still be able to move.
Can you describe how AREE can move on the surface of Venus?
We develop specialized systems to bypass obstacles and determine the amount of energy needed to move, instead of the usual centralized system that allows the all-terrain vehicle to perform several processes or reconfigure the all-terrain vehicle using software.
We are trying to maximally simplify these mechanisms so that each performs its specific task, but performs it well. It is possible that a collision of an all-terrain vehicle with an object will throw a lever, which will force it to move back a little, turn 90º, and go forward again. We can have only one obstacle avoidance system, but such an action can be repeated many times, and as a result, it can be used to circumvent an obstacle.
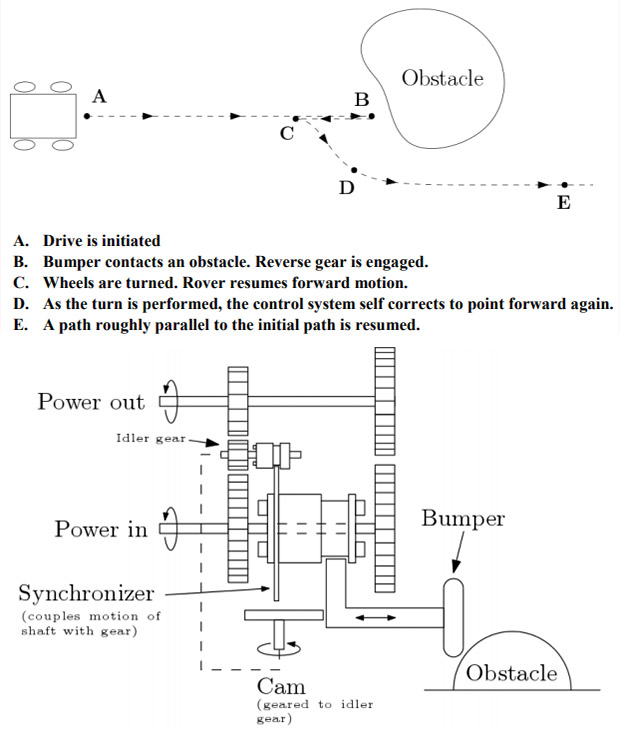
The obstacle avoidance system uses bumper, gears with shifters and an eccentric. She is able to divert the all-terrain vehicle after hitting back, and then re-enable the bumper and shift gears, and continue to move forward. During normal forward movement, the force is transmitted from the input shaft through gears on the right side of the diagram to the output shaft. The remaining gears will rotate freely. At a meeting with an obstacle, the synchronizer includes a reverse gear, which leads to the opposite effect. After fully turning the eccentric, he will move the bumper back to the front position. The same eccentric can be used to rotate the wheels of the all-terrain vehicle when the engine is in reverse.
What features of AREE are unique compared to other Venus-based ATV projects?
Today, there are several concepts of Venus missions, each of which will cost a sum comparable to Mars Curiosity, and offers landing in one place or two places. Most of the proposals are very complex and designed to work from 2 to 24 hours on the surface. We plan to work for a month, and this is where our key innovation works - the opportunity to probe many places on the surface of Venus and understand how it changes with time.
Can you describe how the perfect AREE will meet your expectations?
An ideal robot will be able to work on the most difficult surfaces of Venus, called tesseras , which are coarse, rocky lava, looking like parquet or tile from above. Our goal is to conduct an all-terrain vehicle on such a surface, to take geological samples that will contribute to our understanding of the evolution of Venus. An ideal all-terrain vehicle should be a little over 1.5 m in size - now this restriction is imposed by a thermal shield. If we could, we would increase it to 2.5 m so that it could overcome larger obstacles and get more energy from the wind.
As a result, you need to make an all-terrain vehicle capable of overcoming most of the obstacles that would creep and crawl forward, slowly but surely, collected samples and weather data.
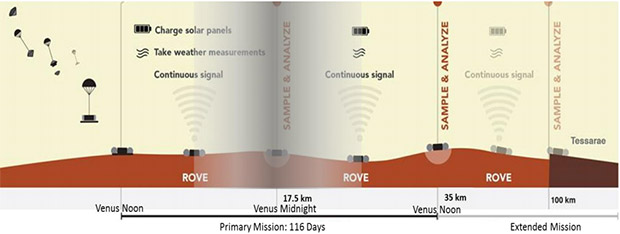
The concept of traveling the plains in the direction of the tesser. During the main part of the mission, which lasts 116 Earth days (one Venusian daily cycle), the cross-country vehicle will cover 35 km. The extended mission will allow him to travel a distance of up to 100 km within three years.
* * *
At this point, you can already begin to wonder - why are we going to send a clockwork all-terrain vehicle to study the surface of Venus, if we cannot get news from him - without electronics, how can he send us some data? There are ways of mechanical data storage - it is quite easy to temporarily store numbers, and about 1 megabit of data can be recorded on a metal phonograph. Well, what's next?
One of the ideas, which is not as insane as it seems at first glance, is to use hydrogen balls to lift metal records into the upper atmosphere of Venus, where they will be intercepted by a high-altitude drone powered by solar energy, read them and transfer their contents to a satellite located on orbit Researchers are also considering the option of a radio on electronic tubes, but although these lamps are capable of operating at high temperatures, they will be vulnerable in the Venusian atmosphere, and they will face loss of tightness.
But the developers of AREE came up with another idea: radar reflectors. A radar reflector mounted on an all-terrain vehicle can be seen from orbit, and by placing a shutter in front of the reflector, it will be possible to transmit about 1000 bits of information during each satellite pass. By adding several reflectors with different reflectivity, as well as shutters operating at different frequencies, you can transfer up to 32 unique variables per day. In addition, in some cases it will be possible not even to transmit certain numbers — for example, by placing a fan in front of the reflector, it will be possible to measure the wind speed at different places on the surface.
Now, having created such a unique all-terrain vehicle, capable of surviving on Venus, with its capabilities and reliability, it is necessary to understand what kind of scientific research it can perform - and this is a particularly difficult question for AREE, as explained in the proposal of Phase I of the NIAC contest:
One of the main weak points of a purely mechanical system is the opportunity for scientific research. In addition to communications, scientific instruments are a key area where high-temperature electronics would be useful. More complex measurements, especially geological ones, require electronic solutions.
At the end of last year, NASA announced the HOTTech program, a high-temperature technology program that funds "advanced technology development for automated high-temperature environment research, in which temperatures approach 500 degrees Celsius or exceed this mark." AREE hopes that as a result of HOTTech, scientific tools will emerge that can survive on their all-terrain vehicle - but for a different outcome, they have some interesting ideas to do science without any electronics. For example, measuring wind speed with a turbine, temperature and pressure with materials expanding with temperature, and chemical properties with rods that react to certain chemical compounds.

Wind energy is stored in a composite spring. The mechanical system in the diagram is capable of measuring the energy stored in the spring, and uses the clutch to transfer energy to the movement system when it accumulates enough. If you want an all-terrain vehicle to move after a certain time, or when other conditions are reached, you can add mechanical logic gates that react to watches or other sensors.
Sauder and the team do not try to create all this mechanics just for fun. Exploring Venus in an interval longer than a day or two is a really important task. “Our goal is not to reproduce what has already been done, or will soon be possible in the field of high-temperature electronics,” says Sauder, “but to create a set of mechanical solutions for those areas in which there are not yet clear solutions.”
The technology developed under the AREE project can be useful in other places of the Solar System - and not only in places with high levels of radiation, like Europe, one of the moons of Jupiter. Here, on Earth, AREE can be useful for collecting samples close to an active volcano or in areas with high levels of radiation. Another advantage of AREE is that it can be completely sterilized at high temperature without damaging the functionality at all. Suppose if under the polar cap of Mars there is a lake with some unusual form of life, you can send sterile AREE there to collect samples and not worry about pollution.
Now AREE has received funding for the second phase of NIAC. The team is working on a more detailed development of the movement system, which, most likely, will lead to the replacement of tracks by some wheels, which is more reliable. They also develop mechanical watches capable of operating at high temperatures — one of the main parts of an autonomous mechanical computer. Sauder says they expect interesting results from the construction and testing of the radar signaling system during the year. It is also very interesting to us - this is one of the most innovative robots that we have seen, and we cannot wait to see how it gets to Venus.
The AREE team, managed by Sauder, also includes Evan Hilgemann, Michael Johnson, Aaron Parnes, Bernie Bienstock and Jeffery Hall [Evan Hilgemann, Michael Johnson, Aaron Parness, Bernie Bienstock, Jeffery Hall]. Jesse Kawata and Kathryn Stack [Jessie Kawata, Kathryn Stack] are additional authors of the final report for Phase I.
All Articles