こんにちは、Habr。 この記事では、古いCDドライブから作られた単純な制御されたクローリングロボットについて説明します。 特定のデザインではなく、アイデアのみを伝えたいので、必要に応じて利用可能な詳細から誰もが似たようなものを作成できるようにします。 この記事には、たくさんの明るい写真と合計25 MBの3つのgifがあります。
誰かがビデオをもっと見たい場合、 このロボットについてのビデオがあります。
多くの電子愛好家は、時代遅れのCDドライブから何ができるかを考えています。 最も一般的なアプリケーションは、DVDライターのレーザーヘッドからのレーザー彫刻と、このヘッドからの2つの動きの座標テーブルです。 自動ドアは通常、ディスク用のスライドテーブルから作成されます(猫やハムスターなど)。 プルアウトテーブルから2つのおもちゃを作りました。「無駄な車」とクロールロボットです。 無駄な車については話さない。なぜならそれは非常に単純だからだ。 気にする人は、 彼女についてのビデオを見ることができます。
ただし、クロールロボットの概念も非常に単純です。 誰かがCDドライブの設計に慣れていない場合は、Wikipediaでそれについて読むことができます 。
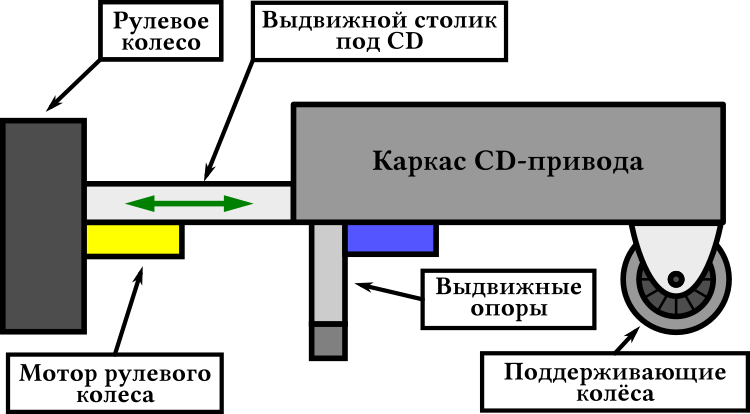
理論的な説明から始めましょう。 下の図は、側面のクロールCDドライブを示しています。 彼には、「サポートホイール」と呼ばれる、自由に回転する2つのホイールがあります。 前部には、独自のエンジンを備えた「ステアリングホイール」があります。 下には、ステアリングホイールを上げるための2つの延長可能なサポートがあります。
ただし、次の図の正面図では、ほとんど理解されていませんでした。

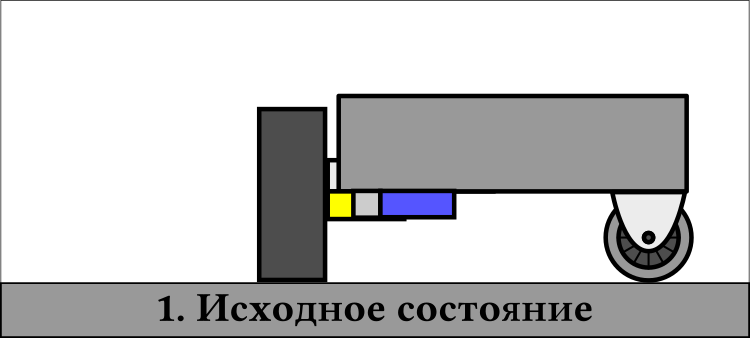
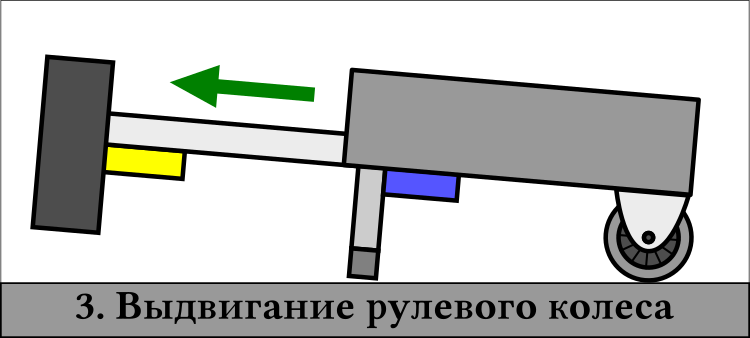
このシステムがどのようにクリープするかは、図にも示されています。 そのため、CDからのスライドテーブルとサポートが押し込まれたときの初期状態があります。 この位置から、ロボットは前後に動き始め、旋回します。
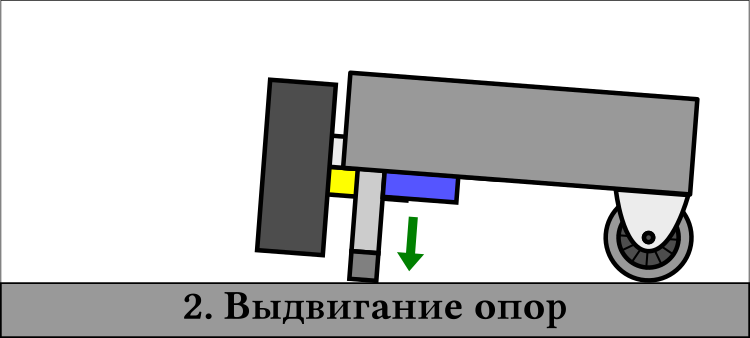
前方に移動するには、サポートが最初に伸びて、ステアリングホイールが上がります。
次に、CDテーブルがハンドルに沿って伸びます。
さらに、サポートが収縮し、ステアリングホイールが下がります。
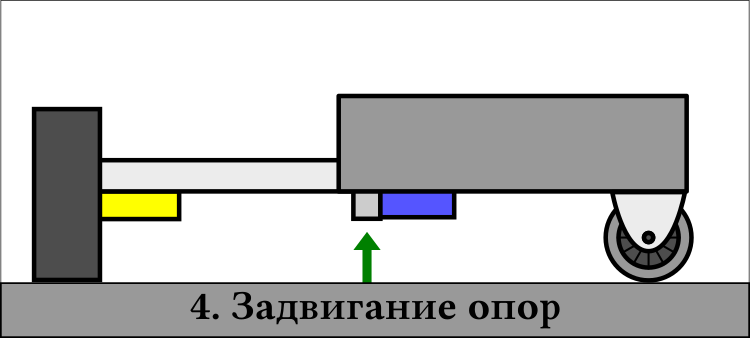
これで、CDのテーブルをスライドして元の状態に戻ることができます。
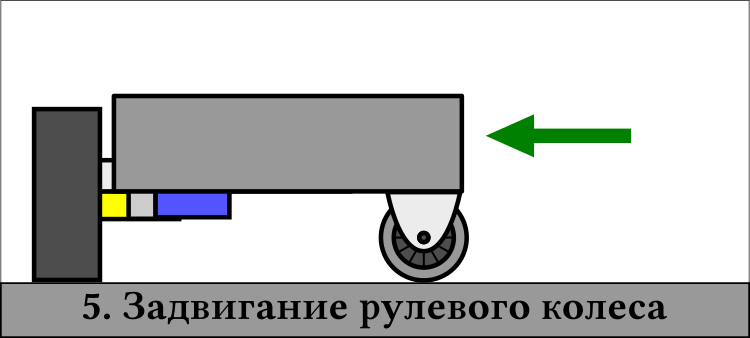
この場合、ハンドルが床面にくっついているため、CDドライブのフレーム全体がハンドルに引っ張られます。 次に、サイクルが繰り返されます。
初期状態でロボットを回転させるには、ステアリングホイールモーターをオンにし、システム全体が支持ホイールの間にある軸を中心に360度回転し始めます。
このことがどのように機能するかを理解すれば、後方への移動がどのように実行されるかを想像することは難しくありません。
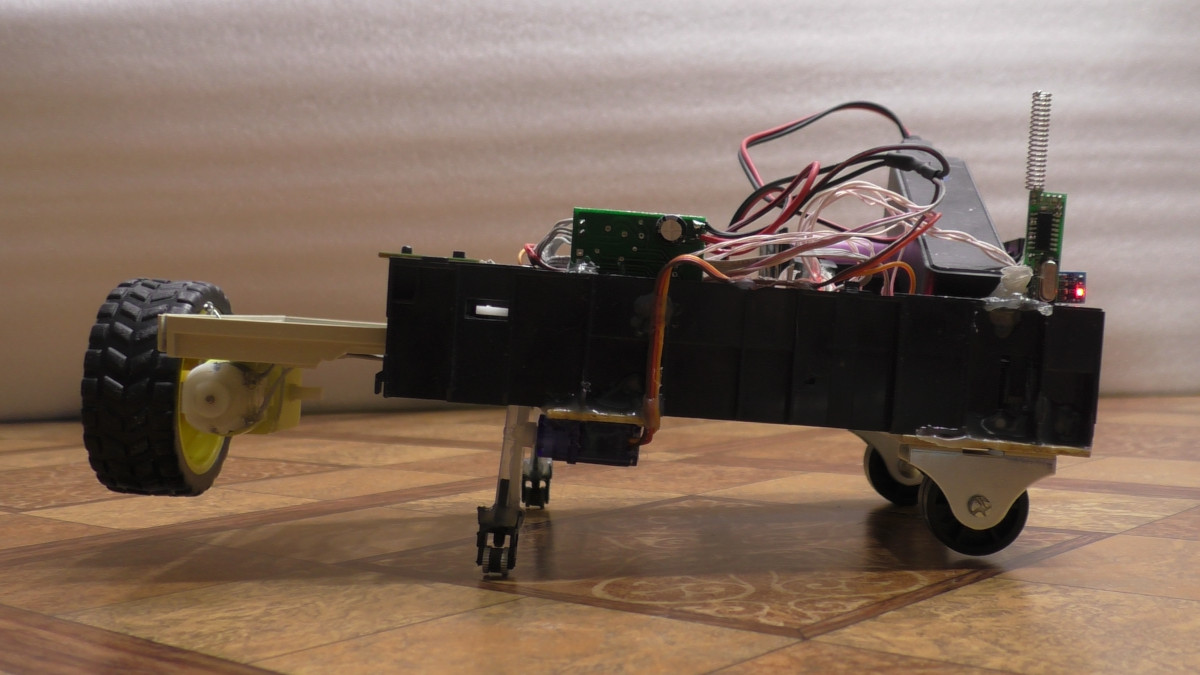
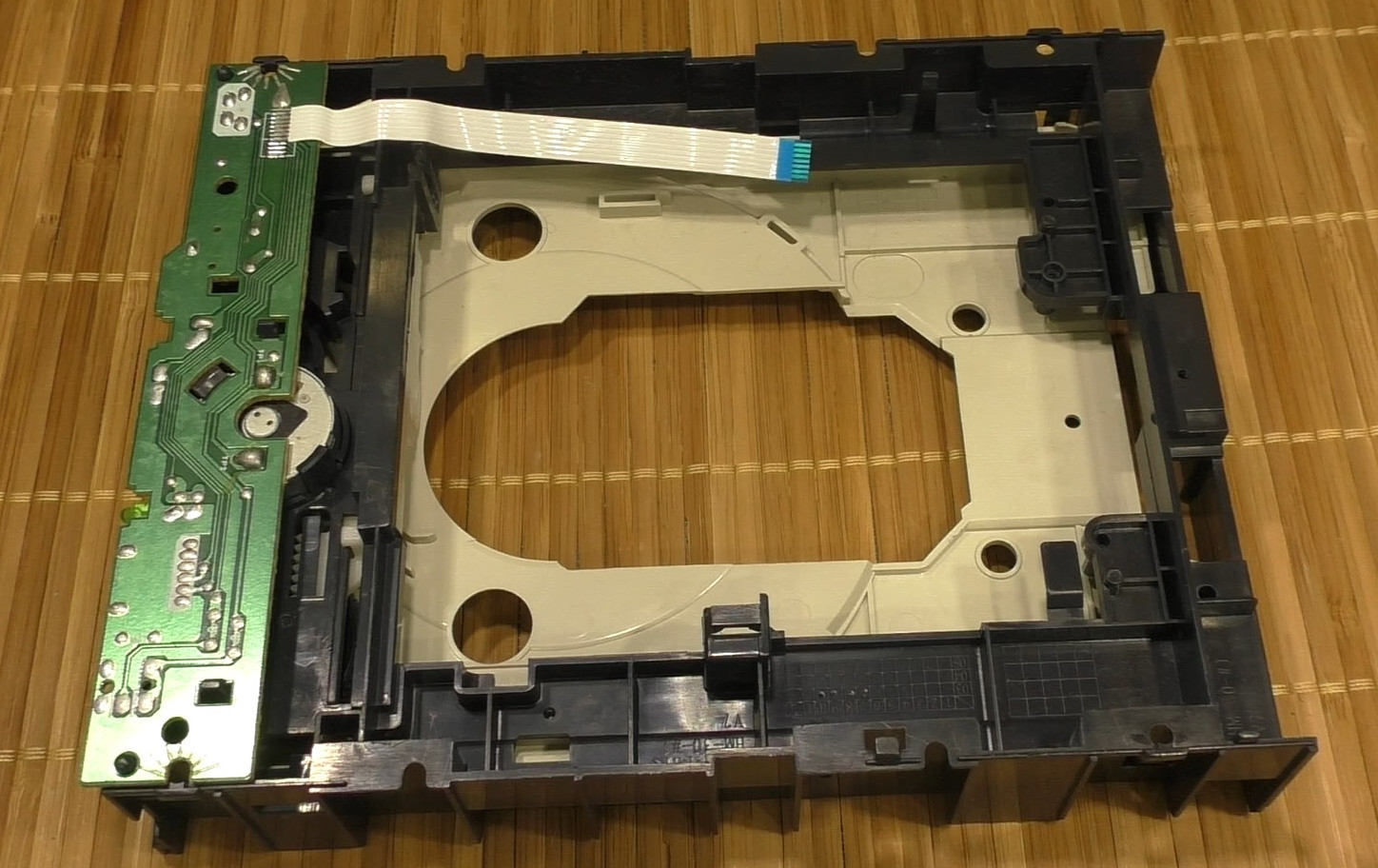
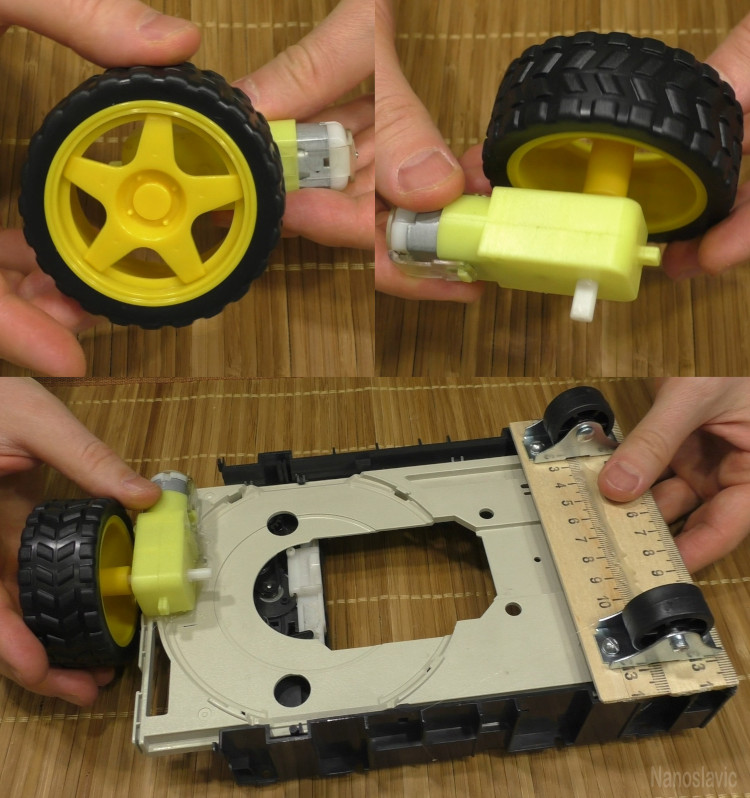
実装について少し説明します。 すべては偶然の方法で行われたため、詳細は説明しません。アイデアの作業能力を確認するためだけです。 私は簡単なCDドライブをベースとして使用し、スライドからすべての光学部品を取り出しました。スライドテーブル、モーター、およびテーブル用のボタンエンドスイッチを備えたプラスチックフレームのみがありました。
付属の家具の車輪を支持輪として。
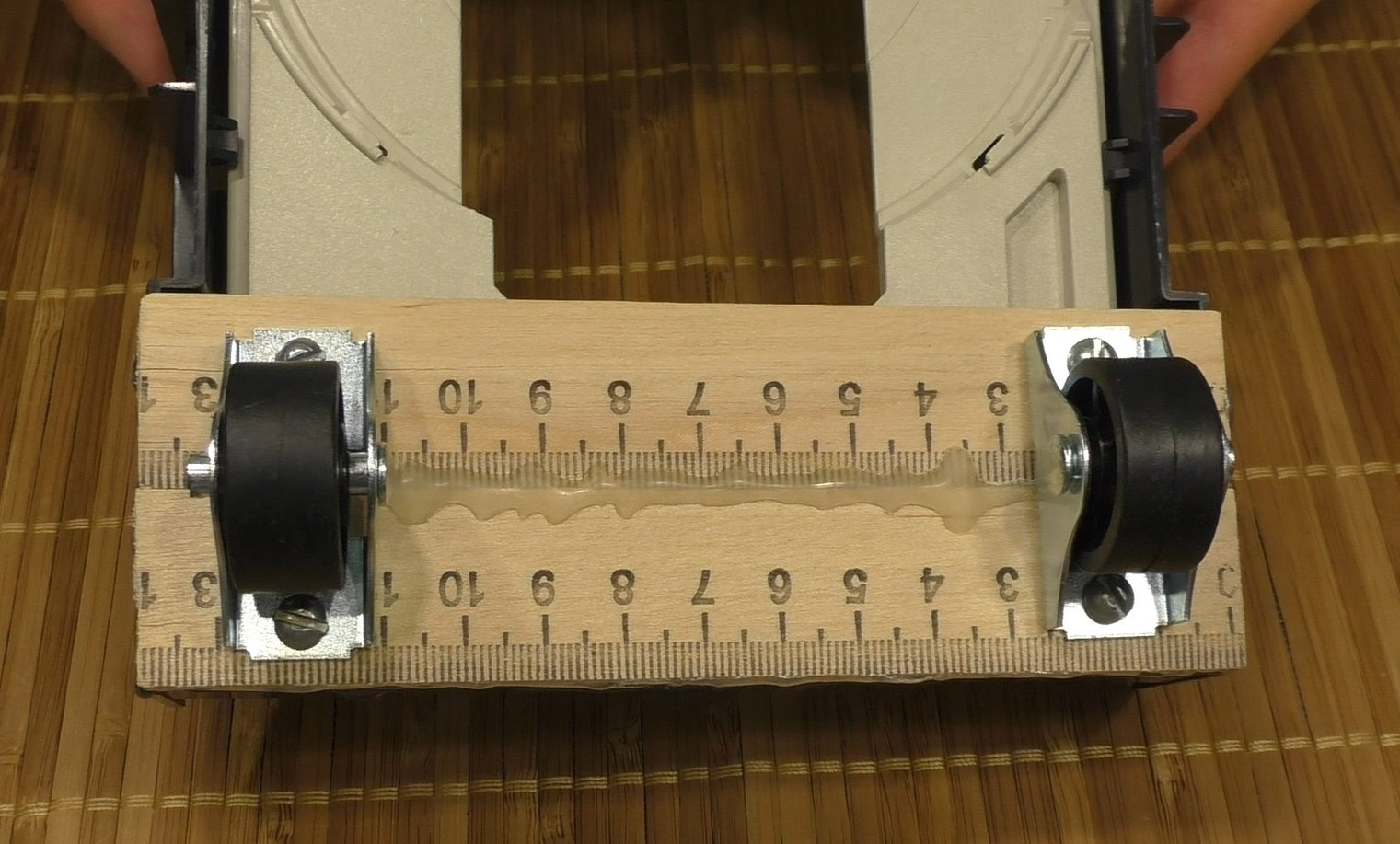
インターネットのどこかでハンドルを別に購入しました。 彼はモーターとプラスチックのギアボックスを持っています。
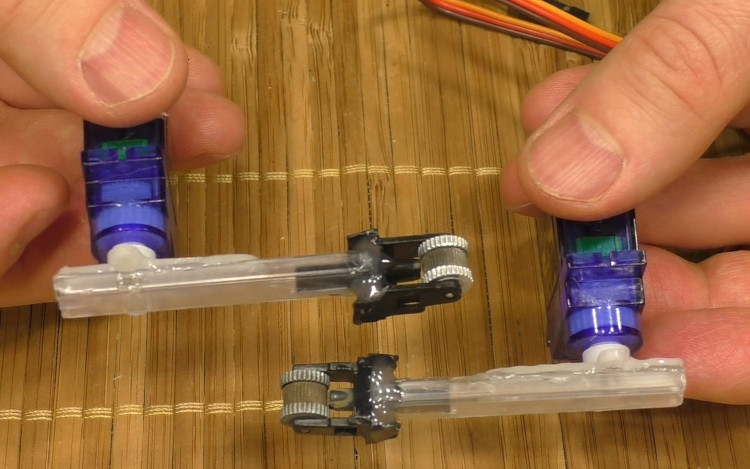
ハウジングSO8のバルクチップで販売されているプラスチックチューブ製の格納式サポート。 ライターを自由に回転できるように、以前にフリントとスプリングを取り外して、ライターから椅子を取り付けました。 サポートを拡張するために、2つの安価なサーボを使用しました。 すべてが主にホットメルト接着剤で組み立てられています。
エレクトロニクスはそれが何であるかで作られていたため、最適ではありません。 CDテーブルとステアリングホイールのモーターを制御するために、トランジスタを使用したブリッジ回路が使用されました。 これにより、回転方向を変更できました。 ロジックとして-ある種のArduinoボード。 動きを制御するために、彼は434 MHzの周波数でキーフォブとレシーバー応答回路を取りました。

モーターに電力を供給するために、3つのリチウムイオン電池を保護なしで直列に接続したので、時々充電を確認しながら慎重に電源を入れました。 デジタル部分とラジオに電力を供給するために、5 Vを発行する小さな安価な電力銀行を使用しました。
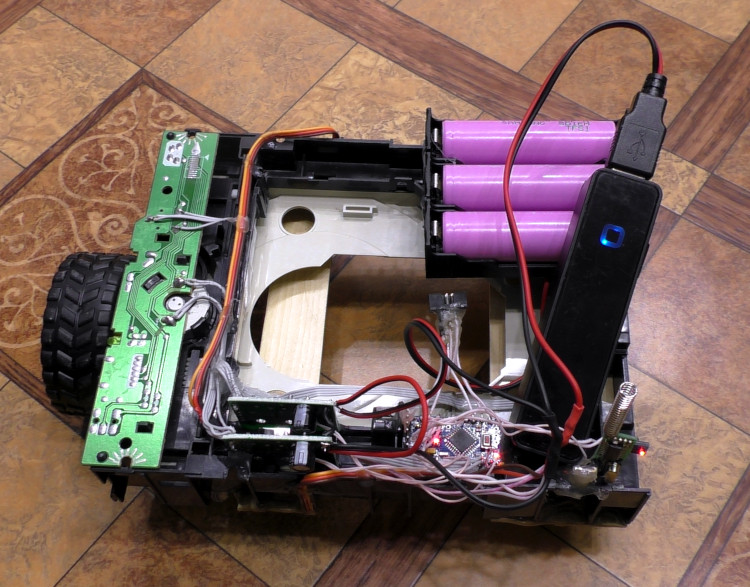
後部のバッテリーは非常に便利です。前方に押すとハンドルが大きく重くなるためです。
オンにすると、制御プログラムはCDドロワーの両端を確認し、システムを元の状態に復元します。 コントロールには4つのボタンが使用されます。 「進む」ボタンをクリックすると、前方への動きが始まります。 システムは停止し、リモコンのいずれかのボタンを押すと初期状態に戻ります。 「戻る」ボタンを押すと、ボタンが後方に移動し、いずれかのボタンを押すと停止します。 左ボタンと右ボタンは、初期状態で、押されている間のみ機能します。
その結果、前進のみが正常に機能することが判明しました。 後方に移動するとき、ステアリングホイールを伸ばすと重心が大きくシフトするため、サポートが正常に持ち上げることができません。 より強力なサーボが必要です。 システムは常に元の状態に戻るため、移動はCDのテーブルの長さで決定される「ステップ」でのみ可能ですが、これは純粋にソフトウェアの制限です。
そして最後に、いくつかのgif。
正面図、側面図、6.8 MB 
前方への移動、上面図、7.8 MB 
回転、上からの眺め、6.3 MB 
ループ上にコントロールパネルを作成し、ボタンとスイッチでモーターを制御することで、システム全体を簡素化できると思います。 サーボを制御するには、タイマー555で簡単なジェネレーターを作成します。通常のバッテリーから電力を供給し、リモートコントロールに配置して、ロボットの重量を減らすことができます。 このようなリモートコントロールを使用すると、ロボットを完全に手動で制御できます。
ご清聴ありがとうございました。