一般に、私のバラライカの場合、および他の多くの場合、私はこのように行かなければなりません:断片を見て、それを一時停止し、著者の後にそれを数回繰り返し、見続けました。 何かが明確ではない場合-巻き戻し、より密接に見えた。 しかし、あなたの手が忙しい場合、それをすべて巻き上げる方法は? さらに、私の場合、巨大なアコーディオンではなくても、いくつかはあるがバラライカでは忙しい。 だから、あなたは自分の足で作業する必要があります。
何年も前、進歩的な人類全員がPS / 2キーボードを使用していたとき、彼らはプロジェクトのために何十ものUSBキーボードを持ってきました。 もちろん、それらを1台のマシンに接続し、1台でCtrlを押し、2台目でAltを押し、3台目でDelを押しました。 効果が達成されました。 それ以来、USBキーボードは完全に並列に動作することを知っているので、別のキーボードを接続してメインキーボードを助け、代わりにいくつかのコードを送信できます。
そこで、キーボードのふりをして、プレーヤーの制御コードを送信するペダルを作るというアイデアが生まれました。 プレーヤーとして、最初はVLCプレーヤーを選択しました。これは、コントロールボタンが十分に文書化されているためですが、後で選択したコードは、フルスクリーンモードでYouTubeのビデオを見るときにまったく同じ目的を持つことがわかりました。 これは良いことです。複数のオンラインビューでは、広告の印象に対して、何かが作者の頭に浮かぶようです。 ダウンロードされた動画を見るのはそれほど倫理的ではありません。
そのため、デバイスの設計を開始します。
作業ロジック
最初は、いくつかのペダルを作りたいと思いました。それぞれが独自の機能を備えています。 最初に、これらの機能の3〜4をカウントしました。オン、オフ、そこでの風、風の戻り。 しかし、それから私はそれがどれくらいのプラスチックを必要とするかを考え出しました-タッチでペダルを理解する方法、そして悲しかったです。 そのため、ロジック全体を根本的に修正することが決定されました。 どんな機能が必要ですか? スタートストップ。ただし、多くの場合、同じキー、通常はスペースでハングします。 そして巻き戻し。 VLC Playerには「Shift +左」があります。 結局のところ、YouTubeも判明しました。 そして、あなたがそう思うなら、それ以上の機能はありません。
いいね! ペダルに「スタート-ストップ」機能を短時間使用させ、長い-「巻き戻し」機能を使用させましょう。
将来的には、機能を拡張できます。 モールス信号を認識するようにペダルをトレーニングできます。 この考えを知った妻は、アイリッシュダンスの要素を使用して制御インパルスをコーディングすることを提案しました...一般に、必要に応じて機能を拡張できます。 しかし、1つのことは明らかです。1つのペダルで十分です。 さて、今は長押しと短押しの認識を行います。
力学
家でスリッパで歩く人には、非常に簡単な解決策があります(ThingiverseのWebサイトで見つけました)。 直径が1センチを超えるボタンを取り、箱型のオブジェクトにねじ込み、ペダルを取得します。 問題は、私はスリッパが好きではないということです。そのため、このオプションは個人的には適していません。 足が痛くないように、より広い面が必要です。
大量のペダルがアリエクスプレスで販売されています。フットスイッチという単語を検索する必要があります。 そこの価格は30ルーブルから始まりますが、この価格では配送費用は約400ルーブルになります。 検索した後、「価格と配送料」の合計が150ルーブルになるペダルを見つけることが可能であることがわかりました。 ただし、平均で数か月待たなければなりません(最近3か月間SDカードを購入しました)。
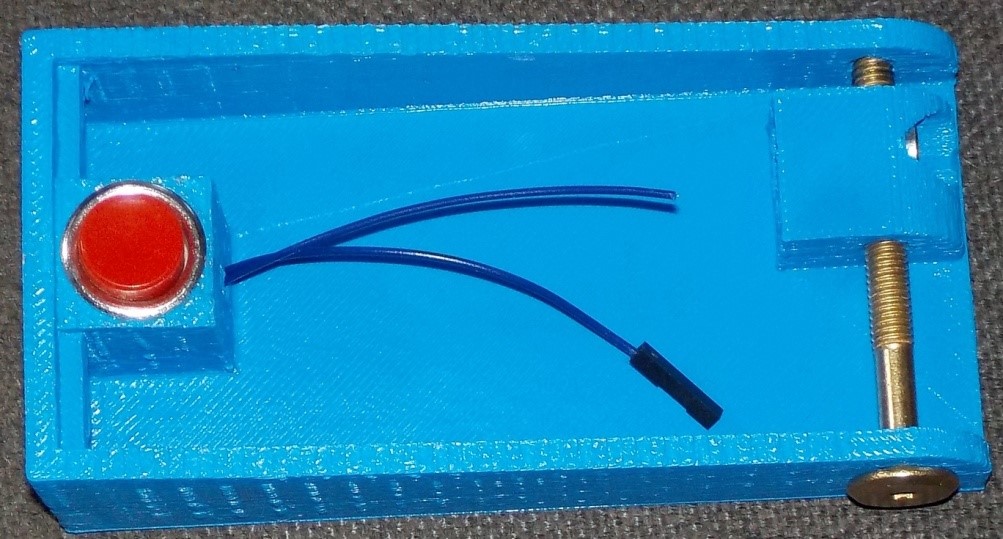
それで、私はより速い方法で行きました:3Dプリンターでペダルを作りました。 個人的な経験(およびThingiverseのすべてのオプション)は、軸が金属でなければならないことを示しています。そうでなければ、すべてがすぐに壊れてしまいます。 ナットが取り付けられた既存のM6x60家具用ボルトと、隣接するラジオパーツにあるボタン(PSW-13)を取り、できる限りプラスチックのように輪郭を描きました。 これがソース資料の見た目です:

下半分に挿入されています。 ご覧のとおり、主な設計上の特徴は、少なくとも4ミリメートルの厚さの壁です。 これらのパラメーターを使用すると、穏やかなプロトタイパーでも非常に耐久性が高くなります。 ボタンは、ナットなしで取り付けられます。その下に空の部分があると、プラスチックが破損し、非常によく保持されます。
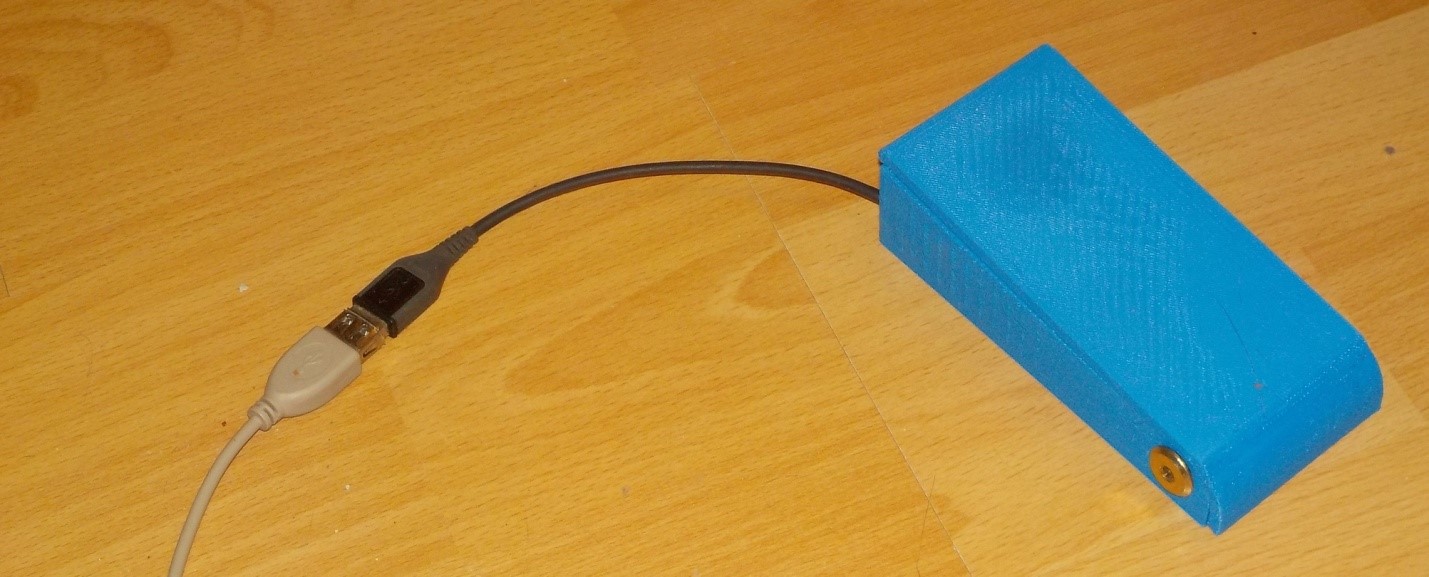
これはほとんどコンパイルされたバージョンです:

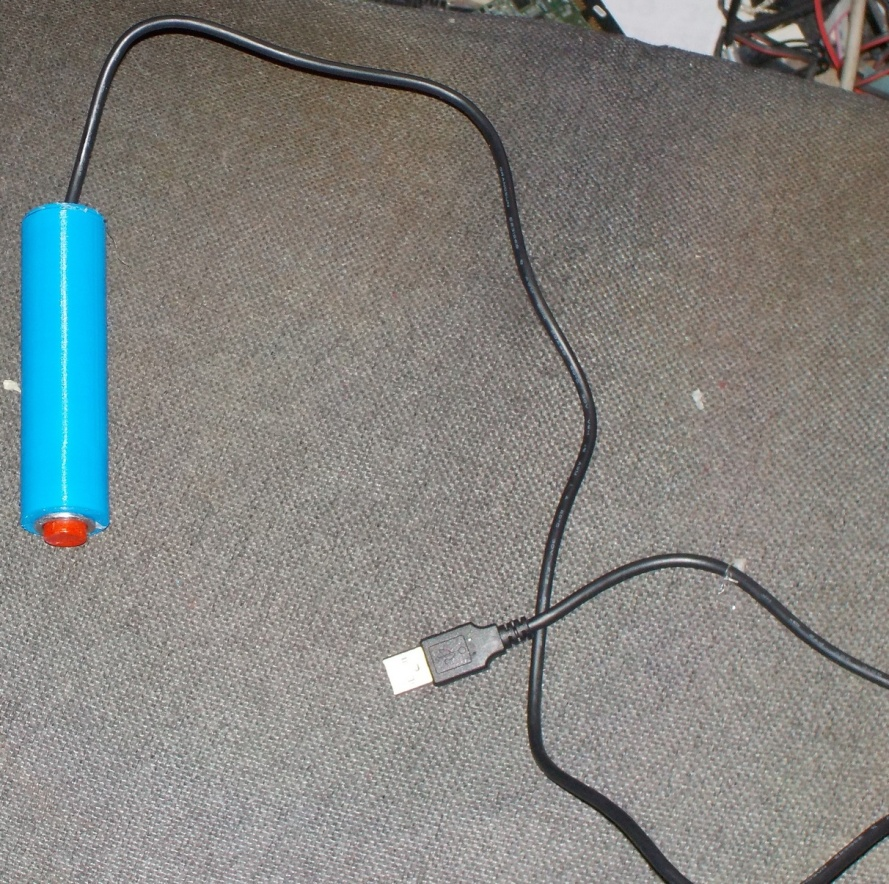
ペダルアセンブリは次のとおりです。
原則として、STLファイルを添付しますが、解決策は完全ではありませんでした。 それでも、誰でもそれを繰り返すことができます(対応するナットとPSW-13ボタンが付いたM6x60ボルトを見つけた場合)。 はじめて十分です-メカニックにスタンプを押してALIで注文できます。
USBデバイス
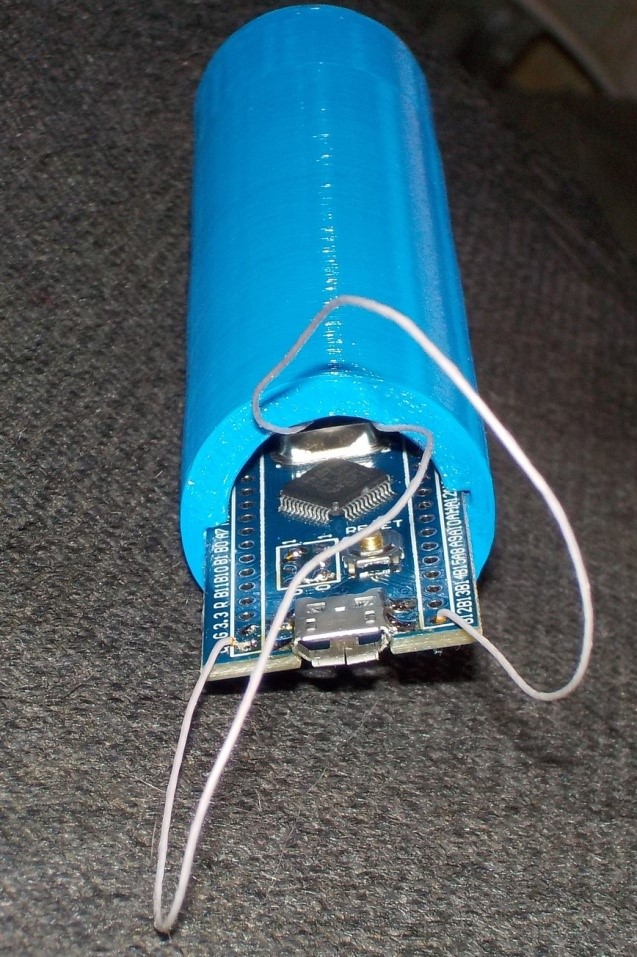
最近PSoCを積極的に宣伝していますが、ペダルでPSoCを使用することは前例のない無駄です。 最良のソリューションはSTM32F103C8T6に基づいたブレッドボードであり、ALI Expressで約120ルーブル(配送を含む)で注文できるようになりました。
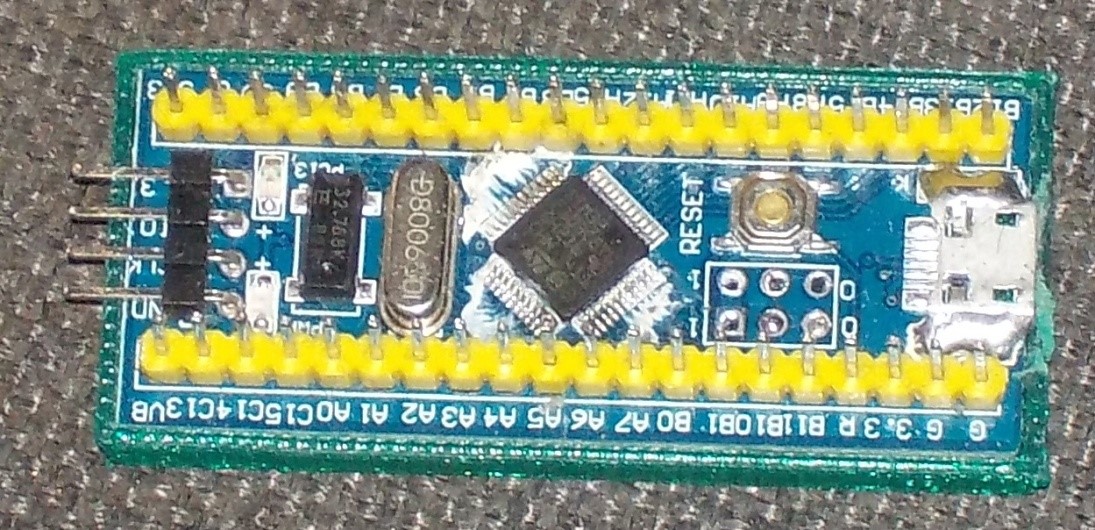
もちろん、AVRに基づいた安価なボードがあると推測できますが、価格差はそれほど大きくなく、STM32はJTAGを介したデバッグにより開発時間が大幅に短縮されます。 1時間(自宅でも)-費用もかかります。 したがって、「デバイスの価格+人件費」という総合基準によれば、STM32F103はこのタスクに最適なオプションです。 さらに、このような場合に備えて、このようなモックアップを12ダース用意しているので、配達待機時間はゼロになりました。
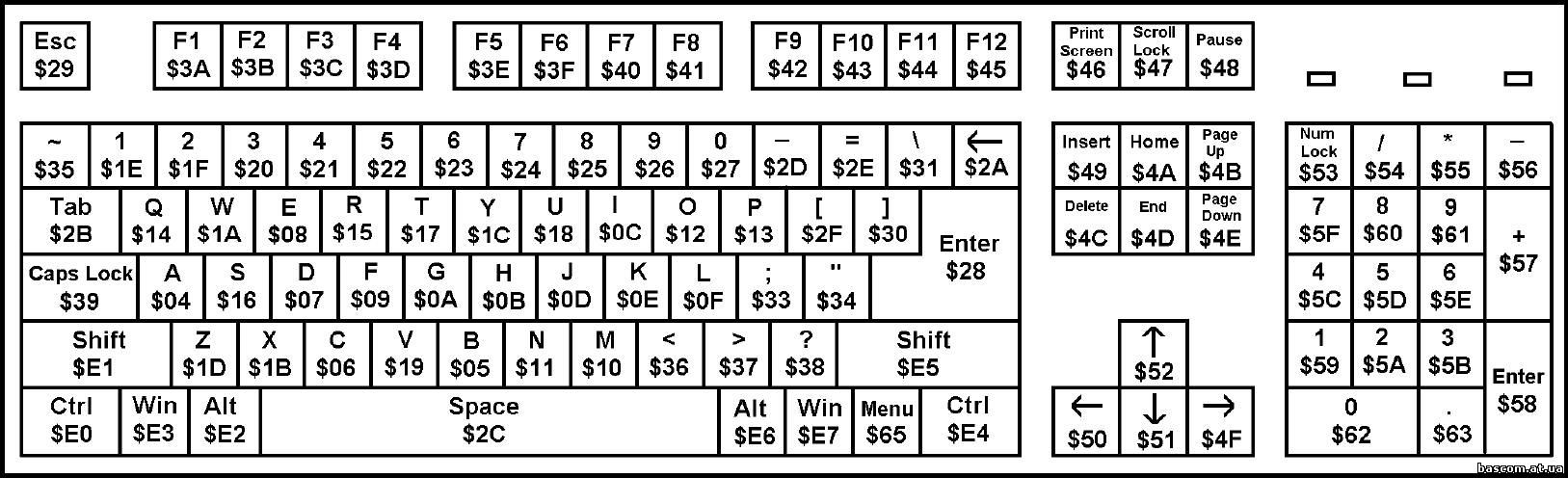
このチップをベースにした既製のUSBキーボードのネットサーフィンをしました。 Habrに関する記事でUSBマウスの作り方を見つけました。 しかし、キーボードが必要です。 キーボードのトピックについては、フォーラムでたくさんの賢いヒントを見つけました(しかし、何か準備ができていたらよかったです)。 しかし、求める者は常に見つけます。 必要なものがすべて揃っている素晴らしい記事を次に示します(コードには1つありますが、この非ロシア語という潜在的なDeadLockを恐れていませんが、独自のコードを作成します)。 主なことは、すべての手順が明確に記述されていることです。CubeMXで作成された完成した「魚」からUSBキーボードを取得する方法です。 著者がしなかった唯一のことは、キーコードを公開しないことでした。 ここに追加します:
軟膏のハエは、最新バージョンのCube MXでは、ファイル、関数、さらには定数の名前もその記事で指定されたものとわずかに異なりますが、類推によってすべてがすぐに見つかります。 新しいバージョンのテキストを書くことはできますが、開発者が再びすべてを変更しないという保証はどこにありますか? 彼らはそれをするのが好きです。 一般的に、私の例ではアナログを見ることができます。
だから。 Cube MXで基本プロジェクトを作成し、上記の記事で推奨されているすべての変更を加えました。 次は? 次に、ボタンポートの説明を追加します。 PB12を選択しました(対応する連絡先がブレッドボードの隅にあるためです)。 私は常にKonstantin Chizhovのmcucppライブラリを使用して鉄を扱うため、プロジェクトプロパティの「-C99」マクロ定義を削除し、 main.cの名前をmain.cppに変更してから、宣言を追加します。
typedef Mcucpp::IO::Pb12 pedal1;
main()関数にポート初期化を追加します(ポートクロッキングを有効にし、脚の方向を設定し、サスペンダーをオンにします):
pedal1::ConfigPort::Enable(); pedal1::SetDirRead(); pedal1::SetPullUp (pedal1::Port::PullUp);
実際には、すべてが初期化されます。 Verilogプロセスのイメージで本体を作成することにしました。 理由がわかりません、ただしたかっただけです。 このプロセスは通常、クロックパルスで呼び出されます。 システムティックは完全にティックとして取得されることにしました。 そのため、 stm32f1xx_it.cファイルのシステムティックハンドラーの通常の機能が次のように追加されました。
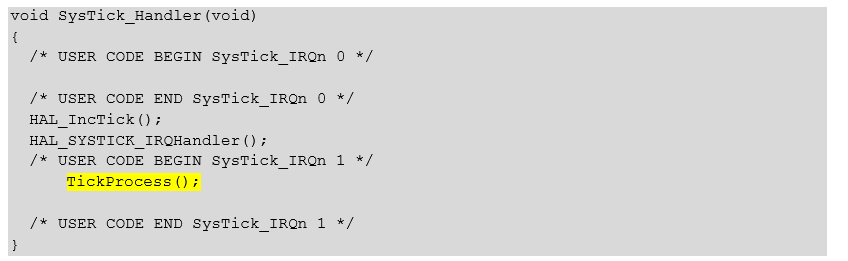
同じテキスト:
void SysTick_Handler(void) { /* USER CODE BEGIN SysTick_IRQn 0 */ /* USER CODE END SysTick_IRQn 0 */ HAL_IncTick(); HAL_SYSTICK_IRQHandler(); /* USER CODE BEGIN SysTick_IRQn 1 */ TickProcess(); /* USER CODE END SysTick_IRQn 1 */ }
TickProcess()関数自体をmainに配置します。 cpp 。 最初に全体を検討し、次に部分的に検討します。
完全な機能は次のとおりです。
uint8_t report [8] = {0,0,0,0,0,0,0,0}; uint32_t* pReport = (uint32_t*)report; extern "C" void TickProcess() { // 20!!! static const int shortTime = 700; // static const int longTime = 2000; // static int localTick = 0; static int tickDuringButton = 0; static bool bButtonStatePrev; bool bButtonState = pedal1::IsSet(); // if ((!bButtonState) && bButtonStatePrev) { tickDuringButton = 0; } // if (bButtonState && (!bButtonStatePrev)) { // // , 50 () if ((tickDuringButton >100)&&(tickDuringButton < shortTime)) { // report [2] = 0x2C; } } // if ((!bButtonState) && (!bButtonStatePrev)) { if ((tickDuringButton == shortTime)||(tickDuringButton > longTime)) { // Shift+ report [0] = 2; // Shift report [2] = 0x50; // } } // bButtonStatePrev = bButtonState; tickDuringButton += 1; if (localTick++ % 20 == 0) { USBD_HID_SendReport (&hUsbDeviceFS,report,sizeof(report)); pReport [0] = 0; pReport [1] = 0; } }
このハンドラーで実装される最初のタスクは簡単です。 20ミリ秒ごとに、押されたボタンに関する情報を含むレポートを送信します(ボタンがない場合は、ゼロだけで送信します)。 関数はミリ秒ごとに呼び出されるため、レポートは20の呼び出しのいずれかに送信する必要があります。 これを行うには、関数の先頭に変数があります。
static int localTick = 0;
最後のコード(データを送信した後、次のセッションからゼロの送信を開始するためにバッファーを消去します):
if (localTick++ % 20 == 0) { USBD_HID_SendReport (&hUsbDeviceFS,report,sizeof(report)); pReport [0] = 0; pReport [1] = 0; }
2番目のタスクはより複雑です。 ペダルを踏む性質を追跡し、後続の提出のためにレポートを埋めます。 イデオロギーはVerilogに似ていると言ったのはなぜですか? 私はいつもそのような言語の違いをキャッチしているので、ボタンの現在の状態を格納する変数があります:
bool bButtonState = pedal1::IsSet();
また、以前の状態が保存される変数があります(思い出すように、以前の状態は、1 msタイマーからの以前の割り込み処理中のボタンの状態です)。
static bool bButtonStatePrev;
押されたボタンの値はfalse 、押されたボタンの値はtrueです。 したがって、ボタンの動的な状態についてはいつでも結論付けることができます。
| bButtonState | bButtonStatePrev | 状態 |
|---|---|---|
| 本当 | 本当 | 長いリリース |
| 本当 | 偽 | 前のメジャーでリリース |
| 偽 | 本当 | 前の小節で押された |
| 偽 | 偽 | 長押し |
2つの定数を導入します。 短押しの時間を設定します。 プレスの持続時間が700ミリ秒未満の場合は、短命です。 2番目は、自動リピートがオンになる時間を設定します。 700ミリ秒後にキーコードの送信を開始すると、プレーヤーは急激に巻き始めます。 これは経験的に特定されています。 したがって、作業のロジックは次のとおりです。700ミリ秒後、単一のコード「Shift + Left」が送信され、その後、ユーザーはペダルを放す機会を与えられます。 ペダルを押し続けている場合、2秒からは、ペダルが放されるまでこのコードの継続的な送信が既に開始されています。
const int shortTime = 700; // const int longTime = 2000; //
ボタンが押されている時間は変数に保存されます:
static int tickDuringButton = 0;
ボタンが押されたばかりの場合、この変数をゼロにして、新しい期間の測定を開始します。
// if ((!bButtonState) && bButtonStatePrev) { tickDuringButton = 0; }
ボタンがリリースされたばかりの場合は、押された時間を確認します。 ほんの少し(今では「100ミリ秒未満」と表示されています)-これはおしゃべりです。 これはカウントされません。 このクリックは無視してください。 短押しの時間を超えて何もしない場合、長押しが下で処理されます。 短押しで、バッファにレポートを作成します(スペースが空いた状態でレポートが作成されます)。
// if (bButtonState && (!bButtonStatePrev)) { // // , 100 () if ((tickDuringButton >100)&&(tickDuringButton < shortTime)) { // report [2] = 0x2C; } }
ボタンが長押しされている場合、次の2つの場合に「Shift +左」を送信します。
- ボタンは正確に700ミリ秒保持されます(単一パッケージ)。
- ボタンは2秒以上保持されます(ボタンが放されるまで、後続の各レポートで送信します)。
// if ((!bButtonState) && (!bButtonStatePrev)) { if ((tickDuringButton == shortTime)||(tickDuringButton > longTime)) { // Shift+ report [0] = 2; // Shift report [2] = 0x50; // } }
実際、それがすべてです。 このコードは、Cube MXが作成した「魚」とは違いません。 組み立て、フラッシュ...いいえ、エラーなしでは不可能です(ここではすべて捕まえられましたが、最初はそれらなしではできませんでした)、JTAGデバッグ(AVRにこんにちは)を介して10分でそれらを識別し、縫製しています、私たちは幸せです...
代替設計
一般的に、そのようなことはバラライカ(またはビデオチュートリアルの他の視聴)なしで便利です。 特に、私はベッドの上に横たわり、腹部にラップトップを置いてニュースを読むのが好きです。 テキストをスクロールするには、常に右手を曲げておく必要があり、これはひじの痛みにつながります。 したがって、長い間、腕を曲げずにページをスクロールできる大きな赤いボタンを夢見てきました。 実際には、家具のボルトを少量のホットグルーに置き換えて、ペダルと同じコンポーネントで作ることができます。 合計:PSW13ボタン、STM32F103C8T6ブレッドボード、3Dプリンター用プラスチック、ホットメルト接着剤。 さて、「ファームウェア」では、短押しで「PgDn」に、長押しで「Up」にコードを置き換えました。
おわりに
足を使って、手が忙しいときにビデオチュートリアルの表示を制御できます。 これを行うには、USBキーボードの操作をシミュレートする1つのペダルだけです。 1つのペダルで複数のキーコードを送信し、さまざまなタイプのキーストロークに基づいて選択できます。 この記事では、2つのタイプ(短押しと長押し)を解析するペダルについて検討します。
メカニズムは、アリエクスプレスの「フットスイッチ」という言葉で見つけることができ、3Dプリンターで印刷することもできます。 電子機器として、ブレッドボードSTM32F103C8T6を使用できます。 「ファームウェア」は、STM32コントローラーのメーカーのCube MXによって作成された「魚」に基づいて1時間以内に実行されます。 追加のコードは、テキストのいくつかの画面を占有します(2Kの解像度-1画面)。
一般に、デバイス全体(機械+「ファームウェア」)は1晩で完全に設計され、3Dプリンターでメカニックを印刷するのに約4時間かかりました。
ペダル印刷用の準備ができたSTLファイルはここからダウンロードできます (多数のサポートを避けるために、トップ要素を0.4 mm下げることが望ましいです:表面がわずかに丸くなっていることが判明し、モデルを下げると、印刷部分が平らになります)。
「大きな赤いボタン」のSTLファイルは、 ここからダウンロードできます 。
プロジェクトの既製のソースファイルとファームウェアのHEXファイルは、 ここからダウンロードできます 。
この記事の公開日は偶然ではありません。 評議会は、そのようなことに関する記事をその日、深刻なサイトに掲載する方が良いと判断しました。 しかし実際には、「Alexey Arkhipovsky」、「Dmitry Kalinin」、「Cranberry Show」、「Alexey Kodenko」というフレーズで見つかったビデオを見ると、アカデミックバラライカはアセンブラーのようなものであることが明らかになります。 そこには、絶対的なシンプルさと必死の表現力が組み合わされています。 「Sergey Vorontsov」というフレーズにより、このツールの使用方法を学ぶことができます。
加算
8か月操作した後、PSW-13ボタンは多くの機能のうち1つで機能し始め、非常に強い圧力がかかった。 交換しようとすると、非常に興味深い詳細が判明しました。 前のボタンと同時に購入した新しいボタンは、まったく異なるパワーリザーブを持ち、まったく異なる位置で動作します。 その結果、彼女はいつも私のペダルを踏んでいました。 ドレメルでそれを挽かなければなりませんでした。 誰が私の力学を繰り返すのか-覚えておいてください。 ボタンをファイルで修正するか、その逆を行う必要がある場合があります-増加させるために、電気テープをスカルプトします。 このボタンのプラスチック部分の再現性はそれほど高くありませんでした。 しかし、一般的に-そのような改訂の後、すべてが再び動作します。