それはすべて、私が若くて素朴で愚かだった2008年に始まりました。私はロボット工学と、一般にさまざまなメカトロニクスに従事していました。 大きなトロリーを作るという考えは、はるかに早く私の熱狂的な頭に落ち着きました。そして今、製造計画の長い妊娠の後、私はこの子供たちの考えの奇跡を作り始めました。
そして、私はそのようなプロトタイプを生み出しました:

正方形断面25x25mmのプロファイルパイプのフレーム。 全体の寸法は500x500x300 mmです。 ええ、はい、私は大規模に考えました... UAZ車のワイパーからの2つのギアモーター、小さな子供の自転車からの車輪の駆動、このものを動かさなければなりませんでした、そして前に2つの風見鶏がありました。 そして、この巨人はアパートに建てられました。
行動アルゴリズムの計画が「ナポレオン」であったという事実を考慮すると、ロボットには本格的なコンピューターが搭載されていたはずで、mini-ITXにはお金がなかったので、ATXの母親に普通のPCを見つけました。 これらはすべて、内部とヒープにさらに2個のヘリウムバッテリーを送り込み、3ミリメートルの組織ですべてを覆いました。 ガラスと一般的には仕掛けが部分的に美しいことが判明しましたが、非常に大きくて重いです。 エレクトロニクスの問題が発生したため、動作させるのに成功しませんでした。ときどきプロジェクトを放棄し、その後再び作業を開始しました...

結局、このデザインは非常に面倒であることに気づきました。そして、主要なアイデアがまだ私の頭に残っていたので、最初からやり直すことにしました...
ほぼ1年後、私は設計を開始しました。 それから私はただCADに興味があり、自分でそれらを研究しようとしました。その結果、最初にAutoCADで図面を作成し、少し後に3Dに変換しました(COMPASS 3Dの研究を始めたとき)。 誰が便利になるのか、面白い人が誰なのかを知っている図面とモデルを無料でアクセスできるようにレイアウトします。
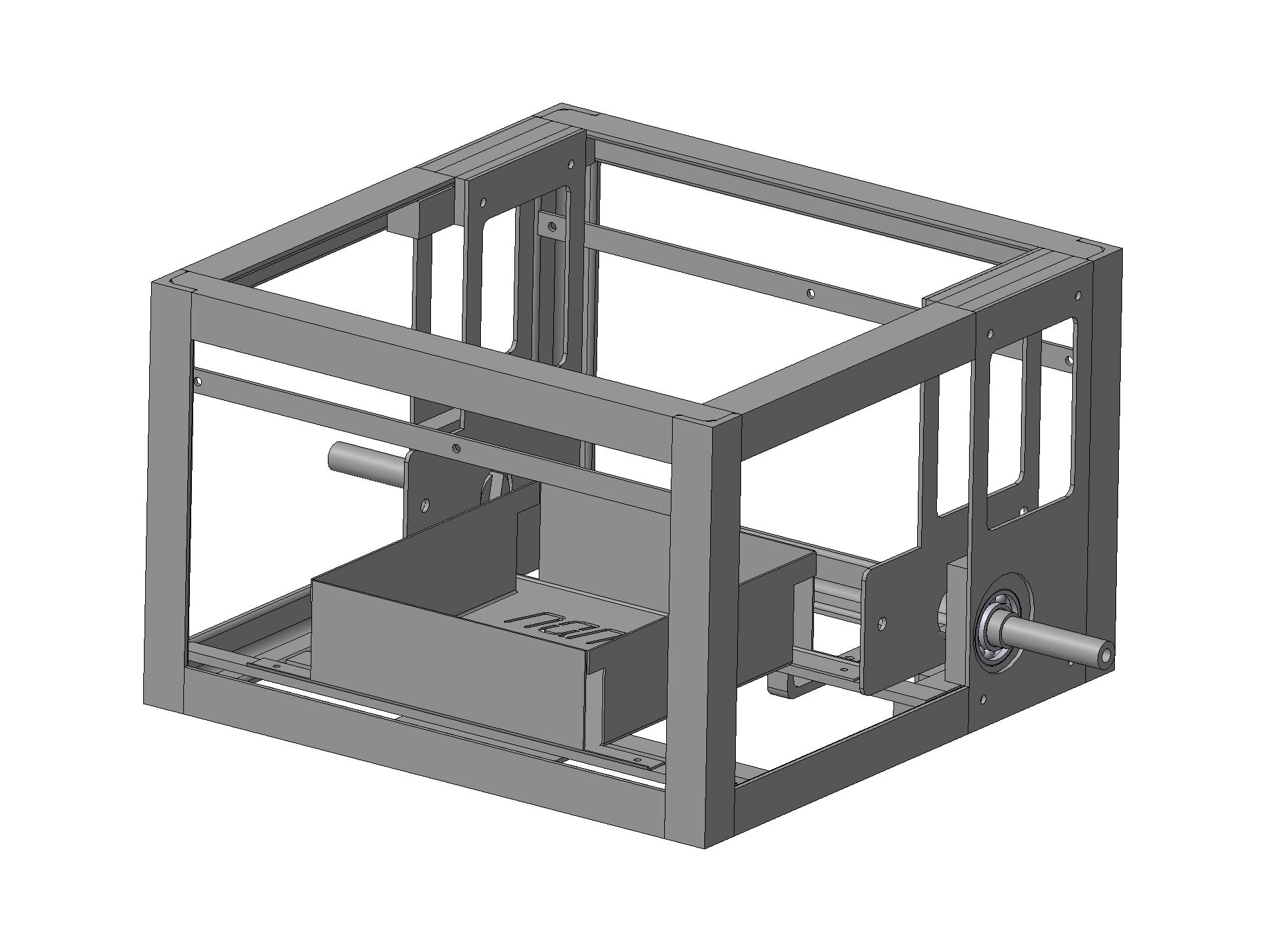
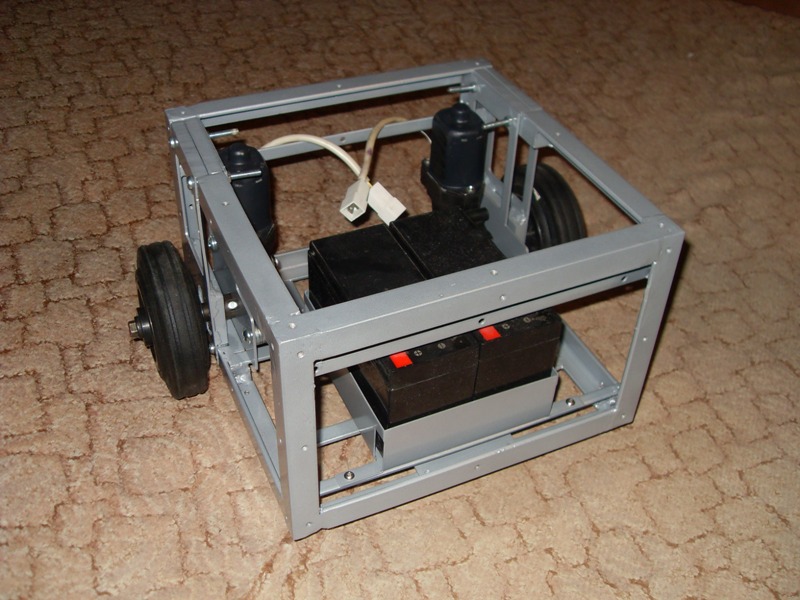
私は図面をおなじみの工場に渡し、そこで彼らはウォッカの数本のボトル(ロシア-それは高価だった)のために私のためにフレームを作った。 サイズは、以前の300x300x200よりも小さく、20番目のコーナーから作成されました。 さらに、エンジンを取り付けるためのプレートと、2つの12ボルトバッテリーを置くためのコンテナがCNCレーザーで切断されました。

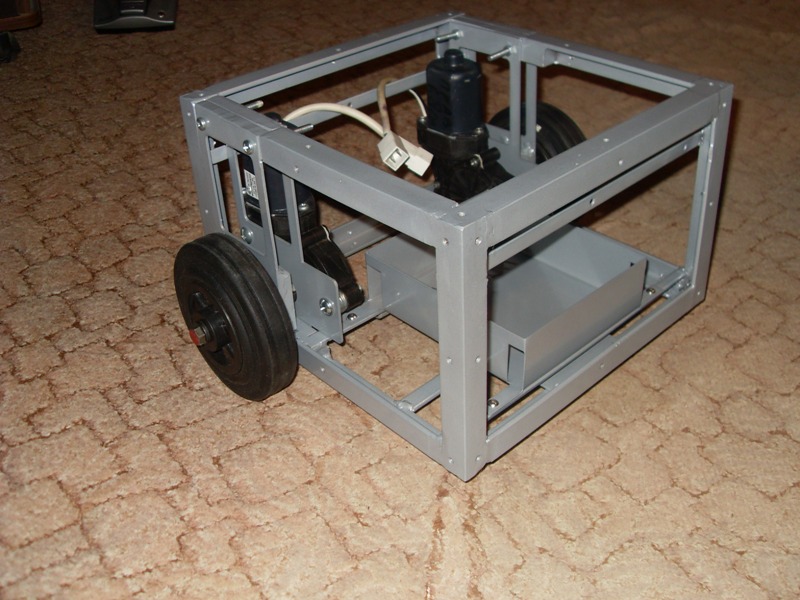
これはすべて長い間行われていたため、フレームは錆びてしまい、後で粉体塗装に使用しました。 直径125 mmのホイールは、ボールベアリングに取り付けられた追加の半軸を介してエンジンに直接取り付けられました。 フロントに小さな羽根車を1つ取り付けます。 私はフレームを鉄で覆うことにしました、それからそれは組織から切り取られるより技術的であるように思われました。 ガラス、私は彼らがCNCで鋼を切るオフィスを知っていたので、それからそれはどんな色でも塗ることができました...


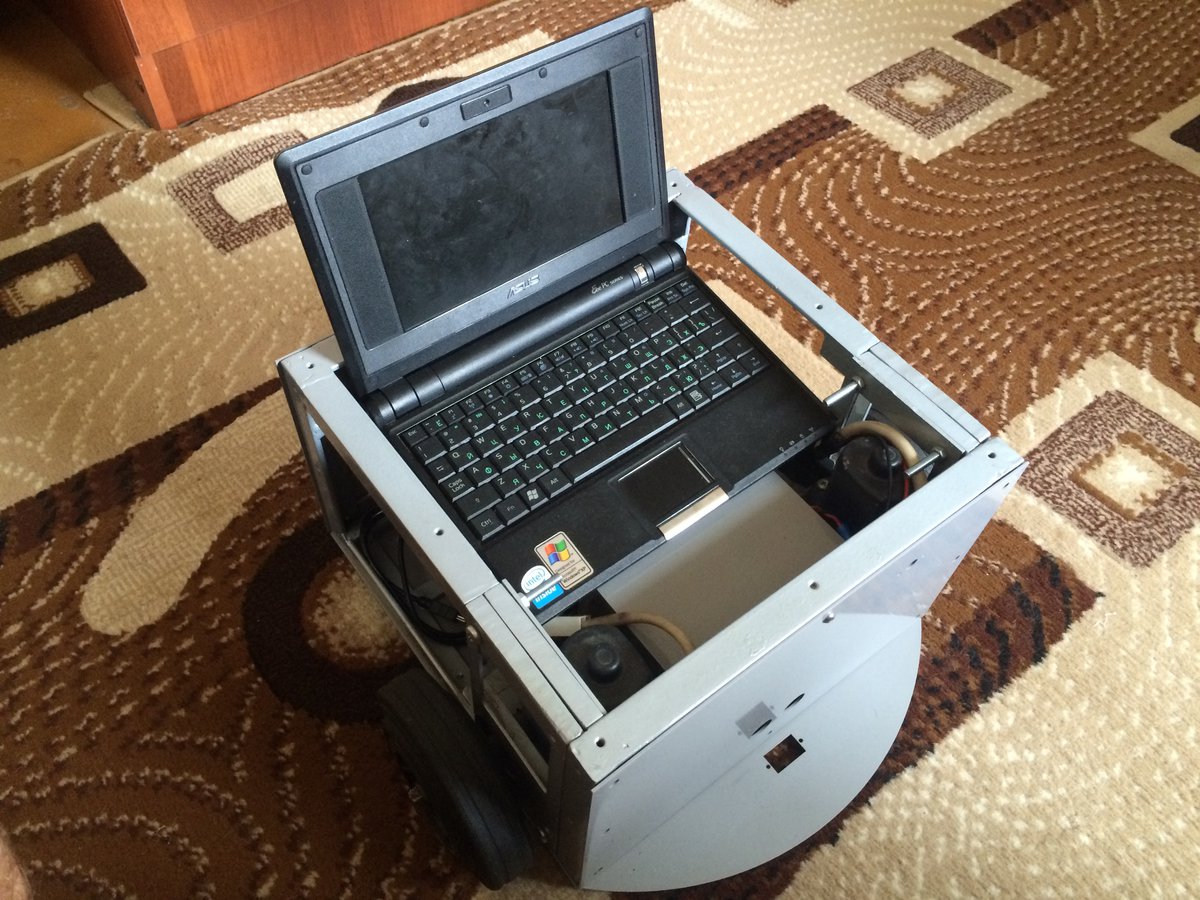
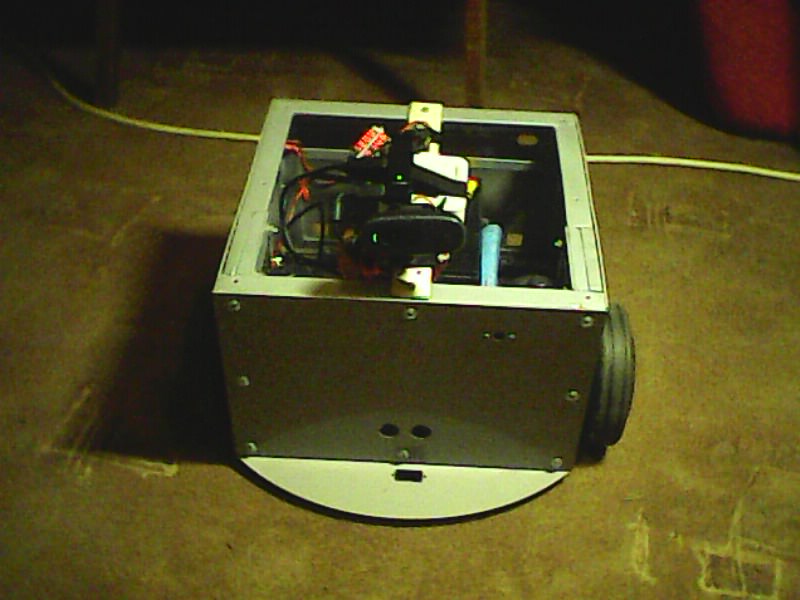
フレームがあれば、すべてがはっきりしているように見えるので、エレクトロニクスに移りましょう。 ロボットをPCからリモートで制御することが計画されていました。また、ロボットは小型コンピューターから何かを置くことも計画していました。 その時までに、古いASUSネットブックをバッテリーから上のロボットの上部に完全に収まる大きさで、親fromから切り取りました。 しかし、ロボットを制御するには、1つのネットブックでは十分ではありません。このため、データを制御および収集するためのAVRマイクロコントローラーに基づくボードOR-AVR-M128-DS、OR-USB-UARTネットブックとの通信用ボード、Open Roboticsからさらに3つのボードを購入する必要がありましたパワーボードドライバーOR-MD2-10A-12V-X、今では確かにすべてをarduinoで実行しますが、それほど人気はなく、これらのモジュールはロボットカート専用に設計されています。 いくつかのレンジファインダーセンサー、一対のエンコーダーをコントロールボードに接続し、いくつかのサーボを制御してレンジファインダーのスキャン角度を変更する予定でした。 私はレーザーポインターとビデオカメラに基づいて距離計を作りたかった。 しかし、それは決して実現しませんでした。すべては、電子機器の接続と管理用の簡単なプログラムの作成に限定されていました。 TeamViewerを使用してリモートで管理します。 私のプログラムには、ポートへの簡単な接続、データ送受信ウィンドウ、速度入力ライン(パーセント単位のPWM)、およびいくつかの方向ボタンがありました。
その結果、電子機器に関する誤解のため、プロジェクトは十分な注意なしに放置され、非常にまれにしか扱われませんでした。 時間が経つにつれて、私は開発がガレージでスローまたはクリーンアップするのは残念だと気づきました。 私は象徴的な価値で売ることに決めました。 おそらくこれにも興味があり、エレクトロニクスやプログラミングの知識があり、誰かが何らかの行動/動きアルゴリズムをうまく働いているか、展示会場や店舗に広告プラットフォームが必要な人がいると考えました(もちろん、彼は足を折る可能性があります) )
エレクトロニクス、バッテリー、ネットブック、レンジファインダー、サーボ(MG996rサーボの下部と上部の丸いカバーに2つの穴がある長方形のカットアウト)、16x2ディスプレイ、1組のLEDアレイ(すぐ下のフロントクラッディングシートにある正方形のカットアウト)とともに、完全に販売しました。

私が理解しているように、私のロボットプラットフォームを買った人は彼女に第二の人生を与えました。 それは2016年であり、旅は栄光の都市イヴァノヴォから英雄都市トゥーラへと始まりました。
しかし、つい最近、3番目の所有者が私に連絡し、現在彼はプラットフォーム(カリーニングラード地域)を持っていると言いました。 どうやら、最初のバイヤーに何か問題がありました...私に連絡した人は私を失望させませんでしたが、プラットフォームは関連するコンポーネントなしで彼に引き渡されましたが、そうでなければロボットスキンは金属1.5で作られているため、すべてが無傷のようですが、驚くことではありません厚さmm、彼はロボットの戦いに参加する時間です...
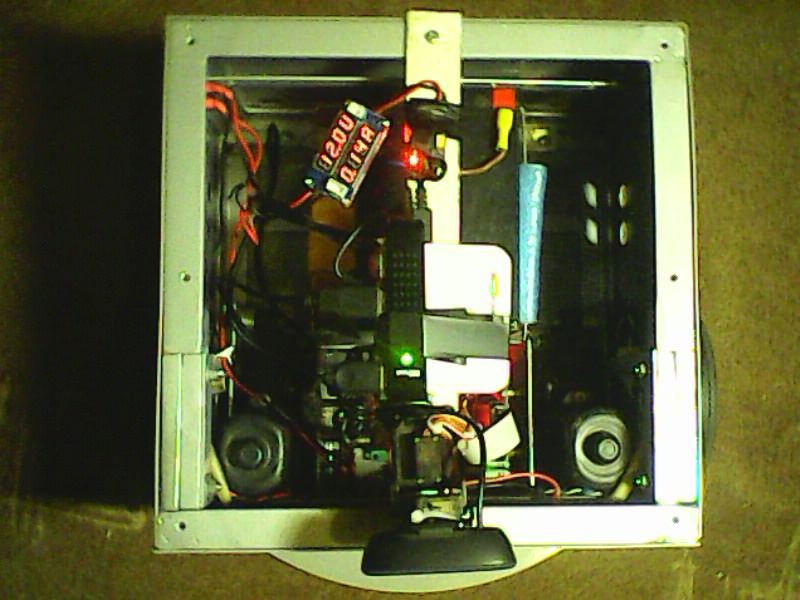
ロボットはアップグレードを受け取りました。新しい所有者が書いたのは次のとおりです。
「プラットフォームが私に来ました。 いくつかの操作により、10 Ah 12Vバッテリーが供給され、カスタムOpenRobotiscファームウェアを備えたTL-MR3020ルーター、サーボ付きブラケット上のLogitech C270ウェブカメラ、4ポート用のマイクロハブ、ルーターに電力を供給するDC-DCコンバーターが追加されました。 その後、これはすべてスクリード、電気テープ、その他の即興的な手段でボルトで固定されました。 「He LIVED!(C)Robocip」火傷を負い、最悪の場合でも足を倒して足を骨折する可能性のある小さな部屋を駆け回る地獄の18 kgの鉄バカ...車輪を通常のものに変更し、サポートホイールを変更し、電子機器を適切に修理して耕す必要がありますワイヤー。 そして、すべての微調整と改善の後、この奇跡の箱は、猫と隣人を怖がらせて庭を駆け回ることができます。 そして、中国のマニピュレーターを6台のサーバーに配置すると、オブジェクトをリモートでポウイングできます。
そして、これは最新の最新ニュースからのものです。
ここに私の赤ちゃんについてのそのような話があります、私は新しい所有者がロボットを放棄しないで、彼が長い間(所有者とロボットの両方)生きることを望みます。 それ以外の場合、プラットフォームの運命はリンゴの木の下に埋められ、鉄で土壌を飽和させます。 もちろん、これはリンゴの木にとって明確な利点ですが、作成されたロボットの直接的な目的ではありません。
「NanoBot」という名前については、すべてが非常に単純です。 恐らく多くの人が(ゾンビボックスで)膨大な量の広告を覚えているでしょう。そこでは、特に物理パラメータを完全に説明しているため、ロボットの名前にこの接頭辞を追加することにした人気のある接頭辞「ナノ」がありました。