ロボモービルはよりスマートになりつつあり、多くのモデルはすでに公道で独立して動くことができます。 さまざまなメーカーの自動操縦装置は、あいまいな標識、遠隔の道路標識、交通状況を認識する優れた仕事をしています。 しかし、非標準的な状況はまだオートパイロットによってあまりうまく解決されていません。
一例として、Uberロボット車システムの障害があります。これは、夜間、道路を間違った場所で道路を横断した暗い服を着たサイクリストを倒しました 。 robomobileのソフトウェアプラットフォームは、その前にあるものを単に「理解」することができず、移動を続けることが決定されました。 この種の問題を解決するために、LuminarとVolvoは特殊なLIDARを開発しました。
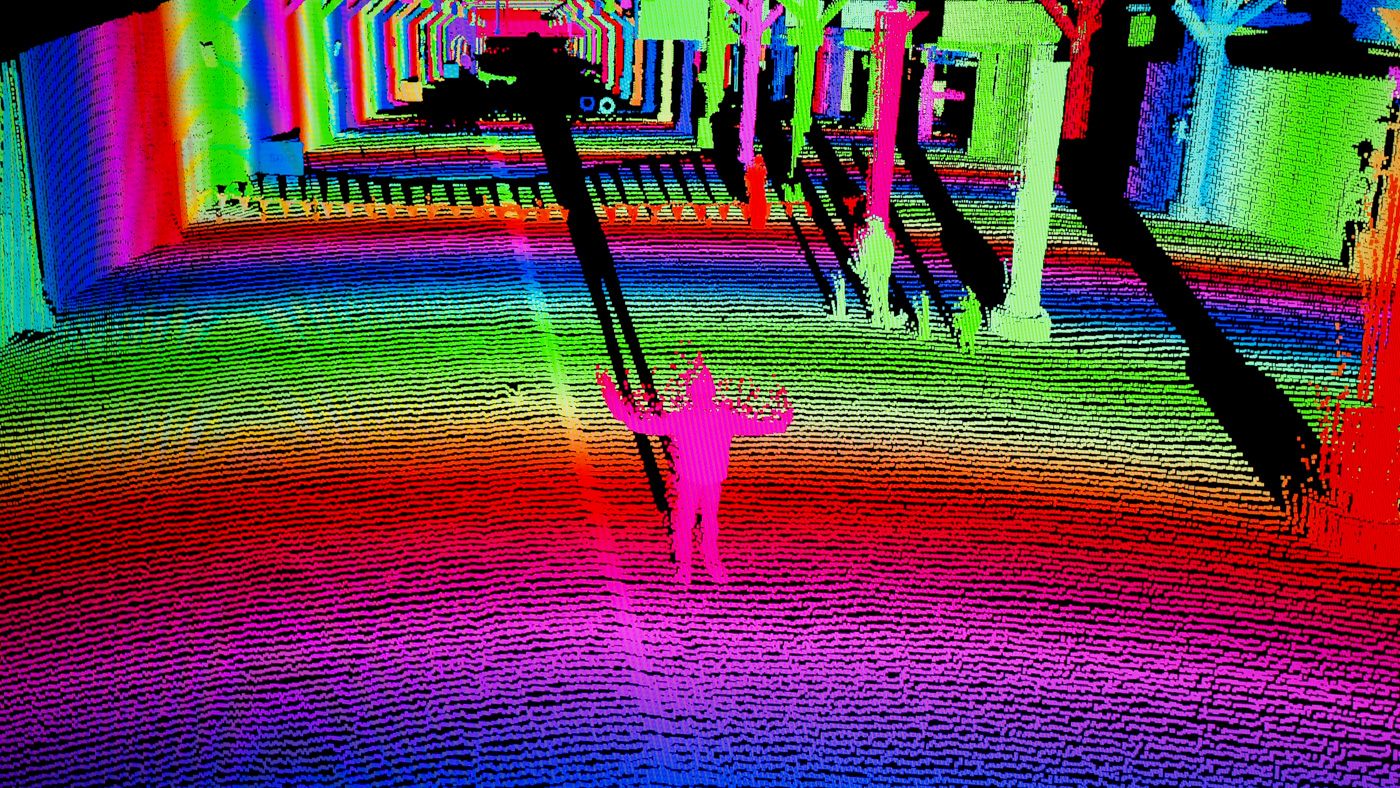
レーザーシステムのおかげで、このデバイスは、ロボットが前方で何が起こっているのかを把握するのに役立ちます-最大4分の1キロメートルの距離で。 Lidarは、人を含む動く物体を簡単に検出し、歩行者の活動のタイプを判別します。 詳細な認識は非常に大きく、コンピューターは前方に移動する(または立つ)人の頭、腕、および足の位置を特定できます。
360cと呼ばれたRobomobileは、高速道路で第4レベルの自律性を達成するための工業デザイナーやエンジニアによる試みです。 これは、車が路上でほとんどすべてのアクションを独立して実行できることを意味し、外部要因を決定し、条件に従ってそれらに反応します。
確かに、ボルボの代表者は、ドライバーがまだ車をトラックに持ってくるか、降りる必要があると主張しています。 しかし、高速セクションでは何もできません。ロボモービルはすべてをすべて処理できます。
ボルボとルミナールは今年初めに協力協定を締結しましたが、実りあるものでした。 Lumiarの幹部によると、同社にはVovloに加えて、トヨタ研究所を含む18のパートナーがいます。
Lumiar LIDARの自動車メーカーの関心は理解できます。250メートルの距離に障害物があると判断すると、自動車は問題なくブレーキをかけることができるからです。 これは大型トラックでさえ停止するのに十分です。
「オブジェクトの形状を評価できる必要があります。ロボットがブレーキをかけるのに十分な時間を確保するために、オブジェクトを検出する必要がある一定の距離が必要です」とLumiarのスポークスマンは言いました。
Luminar は通常 、機械の可動部分にソリューションを配置し、レーザーシステムは人間にとって安全な周波数でレーザーを放射します。レーザービームで視力を損なうことは不可能です。 同社は、判断できる限り、すでに多くのロボモービルにシステムが装備されていることについては話していないが、この数はそれほど多くない。
ちなみに、以前、自動車メーカーは、LIDARが何を測定すべきか、どのコンピューターシステムに対応すべきかについて単一の意見を持っていませんでした。つまり、単一の要件基準はありませんでした。 現在、標準が具体化され始めており、robomobilesのハードウェアプラットフォームの基準はもはやそれほど変わりません。10〜20%以内です。
LIDAR市場のリーディングカンパニーはVelodyneであり、これはそのようなデバイスを最初に開発した企業です。 Velodyneシステムは屋根の上にあり、ロボモービルに円形の「ビジョン」を提供するために回転します。 他のほとんどのメーカーでは、LIDARは実質的に動かない固定ユニットです。
ロボモービルの業界で働くいくつかの企業は、リーダーとしての足場を獲得するために、ライダーで使用される技術の特許を取得しようとしています。 少し前まで、そのような試みは Googleの一部門であるWaymoによって行われました。
既に述べたVelodyneは、スタートアップQuaneregyとの特許紛争に巻き込まれました。 他の企業も同様の手続きを行っています。
そうかもしれませんが、テクノロジーは徐々に開発されており、LIDARはますます完璧になっています。 第4レベルのロボモービルはすぐそこにあります。5〜7年後には公道を走り、テスト用ではなく乗客を輸送します。