取引戦略に関する権威ある本を読み、取引ロボットを書きました。 驚いたことに、ロボットは何百万人も、事実上取引さえしません。 その理由は明らかです。特定の市場、特定の期間に適合したパラメーターの選択において、レーシングカーのようなロボットを「調整」する必要があります。
ロボットには十分な設定があるため、時間のかかる最高のタスクを求めて、可能なすべての組み合わせを繰り返し処理します。 かつて、最適化問題を解いて、取引ロボットのパラメーターの準最適ベクトルの検索アルゴリズムの合理的な選択が見つかりませんでした。 したがって、いくつかのアルゴリズムを個別に比較することにしました...
最適化問題の簡単な説明
取引アルゴリズムがあります。 入力データ-1年間の観測の時間間隔の価格履歴。 出力データ-P-損益、スカラー値。
取引アルゴリズムには4つの構成可能なパラメーターがあります。
- Mfは、「高速」 移動平均の期間です。
- 「遅い」移動平均のMs期間
- T-TakeProfit、個々の取引の目標利益レベル、
- S-StopLoss、個々のトランザクションごとの目標損失レベル。
各パラメーターに範囲と固定変更ステップを割り当て、各パラメーターに合計20個の値を割り当てます。
したがって、入力データの1つの配列で1つのパラメーターの最大利益(P)を検索できます。
- たとえば、P = f(Ms)のように1つのパラメーターを変化させ、最大20個のバックテストを生成し、
- たとえば、P = f(Ms、T)などの2つのパラメーターを変化させ、最大20 * 20 = 400のバックテストを生成し、
- たとえば、P = f(Mf、Ms、T)の3つのパラメーターを変化させ、最大20 * 20 * 20 = 8,000のバックテストを生成し、
- 各パラメーターP = f(Mf、Ms、T、S)を変化させ、最大20 ^ 4 = 160,000のバックテストを生成します。
ただし、ほとんどの取引アルゴリズムでは、1つのテストを実行するのに数桁の時間がかかります。 これにより、パラメータの可能な組み合わせのセット全体を反復する必要なしに、パラメータの準最適ベクトルを見つけるタスクにつながります。
取引および取引ロボットに関する詳細
証券取引所での取引、外国為替ディーリングセンターでの賭け、「バイナリーオプション」への狂った賭け、暗号通貨での推測-一種の「診断」、そして「病気」の発展のためのいくつかの可能な選択肢。 非常に一般的なシナリオは、プレイヤーが「直感」をプレイした後、自動取引を行う場合です。 誤解しないでください。アクセントを付けたくないので、「技術的および数学的に」厳密な取引ロボットは、素朴で無力な「手動」取引とは対照的です。 たとえば、裁量的であれ完全自動であれ、投機を通じて効率的な市場(透明で流動的な市場から読み取られる)から利益を引き出しようとする試みは、いずれも先験的に失敗する運命にあると確信しています。 おそらく、ランダムな運の要因を許可しない場合。
それでも、取引、特にアルゴ(リズミカル)取引は、多くの人にとって人気のある趣味です。 独立して取引ロボットをプログラムするものもあれば、取引戦略を記述、デバッグ、バックテストするための独自のプラットフォームを作成するものもあれば、既製の電子「エキスパート」をダウンロード/購入するものもあります。 しかし、自分で取引アルゴリズムを書いていない人でさえ、著者の考えに従って利益を得るために、この「ブラックボックス」をどのように扱うかについての考えを持っているべきです。 根拠にならないように、単純な取引戦略の例を使用して、さらに観察します。
取引ロボットは、金の価値のダイナミクスをトロイオンスあたりのドルで分析し、一定量の金を「購入」または「販売」することを決定します。 簡単にするために、ロボットは常に1トロイオンスで取引すると仮定します。
たとえば、購入時の金のトロイオンスのコストは1075.00 USDでした。 その後の販売(取引の終了)の時点で、価格は1079.00 USDに上昇しました。 この取引の利益は4米ドルになりました。
ロボットが1075.00 USDで金を「販売」し、その後1079 USDの価格で金を「購入」して取引を完了(クローズ)した場合、取引の利益はマイナス-4 USDになります。 実際、ロボットが後で「買い戻す」ために、ロボットが持っていない金をどのように売るかは私たちにとって重要ではありません。 ブローカー/ディーリングセンターを使用すると、トレーダーはレートの差に基づいて、何らかの方法で資産を「購入」および「販売」し、収益を得る(または損失することが多い)ことができます。
ロボットの入力データを決定しました。これは実際、金の価格(時価)の時系列です。 あなたが私の例があまりに単純すぎて重要ではないと言うなら、私はあなたを保証することができます:彼らの取引で市場(そして実際にはトレーダーも)で循環するほとんどのロボットは彼らが取引している商品の価格統計によってのみ導かれます。 いずれにせよ、取引戦略のパラメトリック最適化の問題では、価格ベクトルに基づくロボット取引と、マルチソートされた市場分析のテラバイト配列にアクセスするロボットの間に根本的な違いはありません。 主なことは、これらのロボットの両方が履歴データでテストできる(できるはずです)ということです。 アルゴリズムを決定する必要があります。つまり、同じ入力データ(モデル時間、必要に応じてパラメーターとして使用することもできます)で、取引ロボットは同じ結果を表示する必要があります。
それでも、取引、特にアルゴ(リズミカル)取引は、多くの人にとって人気のある趣味です。 独立して取引ロボットをプログラムするものもあれば、取引戦略を記述、デバッグ、バックテストするための独自のプラットフォームを作成するものもあれば、既製の電子「エキスパート」をダウンロード/購入するものもあります。 しかし、自分で取引アルゴリズムを書いていない人でさえ、著者の考えに従って利益を得るために、この「ブラックボックス」をどのように扱うかについての考えを持っているべきです。 根拠にならないように、単純な取引戦略の例を使用して、さらに観察します。
シンプルな取引ロボット
取引ロボットは、金の価値のダイナミクスをトロイオンスあたりのドルで分析し、一定量の金を「購入」または「販売」することを決定します。 簡単にするために、ロボットは常に1トロイオンスで取引すると仮定します。
たとえば、購入時の金のトロイオンスのコストは1075.00 USDでした。 その後の販売(取引の終了)の時点で、価格は1079.00 USDに上昇しました。 この取引の利益は4米ドルになりました。
ロボットが1075.00 USDで金を「販売」し、その後1079 USDの価格で金を「購入」して取引を完了(クローズ)した場合、取引の利益はマイナス-4 USDになります。 実際、ロボットが後で「買い戻す」ために、ロボットが持っていない金をどのように売るかは私たちにとって重要ではありません。 ブローカー/ディーリングセンターを使用すると、トレーダーはレートの差に基づいて、何らかの方法で資産を「購入」および「販売」し、収益を得る(または損失することが多い)ことができます。
ロボットの入力データを決定しました。これは実際、金の価格(時価)の時系列です。 あなたが私の例があまりに単純すぎて重要ではないと言うなら、私はあなたを保証することができます:彼らの取引で市場(そして実際にはトレーダーも)で循環するほとんどのロボットは彼らが取引している商品の価格統計によってのみ導かれます。 いずれにせよ、取引戦略のパラメトリック最適化の問題では、価格ベクトルに基づくロボット取引と、マルチソートされた市場分析のテラバイト配列にアクセスするロボットの間に根本的な違いはありません。 主なことは、これらのロボットの両方が履歴データでテストできる(できるはずです)ということです。 アルゴリズムを決定する必要があります。つまり、同じ入力データ(モデル時間、必要に応じてパラメーターとして使用することもできます)で、取引ロボットは同じ結果を表示する必要があります。
トレーディングロボットの詳細については、次のネタバレをご覧ください。
ロボット取引アルゴリズム 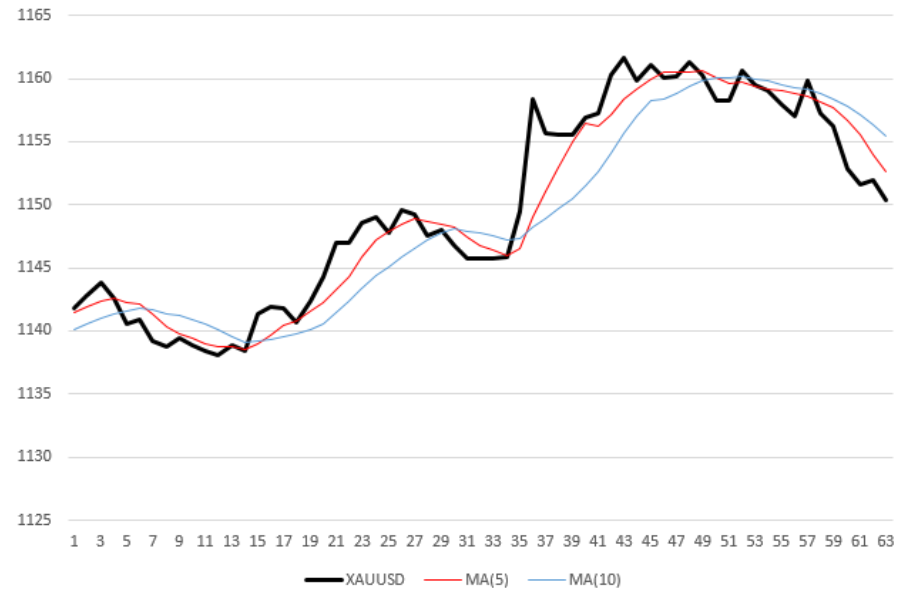
チャート上の黒い(太い)曲線は、1時間ごとのXAUUSD価格測定です。 赤と青の2本の細い破線-平均期間がそれぞれ5と10の平均価格値。 つまり、期間が5、10の移動平均(MA)です。たとえば、赤い曲線の最後の(右)ポイントの縦座標を計算するために、最後の5つの価格値の平均を取りました。 したがって、各移動平均は、価格曲線に対して「平滑化」されるだけでなく、それに対する期間の半分だけ遅れます。
ロボットには、購入/販売の決定を行うための簡単なルールがあります。
-短い期間の移動平均(「速い」 MA )がボトムアップの長い期間(「遅い」MA)の移動平均と交差すると、ロボットは資産(金)を購入します。
「高速」MAが「低速」MAを上から下に横切るとすぐに、ロボットは資産を販売します。 上の図では、ロボットは5つのトランザクションを実行します。タイムスタンプ7、31、および50での3つの販売と2つの購入(マーク16および36)です。
ロボットは、無制限の数のトランザクションを開くことができます。 たとえば、ある時点で、ロボットが複数の保留中の購入と販売を同時に行う場合があります。
ロボットはすぐに取引を終了します:
StopLossが0.2%であるとします。
この取引は、1061.50の価格での金の「販売」です。
金の価格が1061.50 + 1061.50 * 0.2%/ 100%= 1063.12%に上昇するとすぐに、取引の損失は明らかに0.2%になり、ロボットは自動的に取引を終了します。
ロボットは、次のXAUUSD見積もりの発行後、各時間の終わりに、個別の時点でトランザクションの開始/終了に関するすべての決定を行います。
はい、ロボットは非常にシンプルです。 同時に、その要件を100%満たしています。
単純なロボットの例を使用すると、ロボット設定のすべての可能なベクトルの完全な列挙は、4つの可変パラメーターでも高すぎることがわかります。 徹底的な検索の明らかな代替手段は、特定の戦略に従ってパラメーターベクトルを選択することです。 CFが最高に近づく(または選択するCFと達成する結果に応じて最小になる)最適な組み合わせを探して、可能なすべての組み合わせの一部のみを考慮します。
チャート上の黒い(太い)曲線は、1時間ごとのXAUUSD価格測定です。 赤と青の2本の細い破線-平均期間がそれぞれ5と10の平均価格値。 つまり、期間が5、10の移動平均(MA)です。たとえば、赤い曲線の最後の(右)ポイントの縦座標を計算するために、最後の5つの価格値の平均を取りました。 したがって、各移動平均は、価格曲線に対して「平滑化」されるだけでなく、それに対する期間の半分だけ遅れます。
取引開始ルール
ロボットには、購入/販売の決定を行うための簡単なルールがあります。
-短い期間の移動平均(「速い」 MA )がボトムアップの長い期間(「遅い」MA)の移動平均と交差すると、ロボットは資産(金)を購入します。
「高速」MAが「低速」MAを上から下に横切るとすぐに、ロボットは資産を販売します。 上の図では、ロボットは5つのトランザクションを実行します。タイムスタンプ7、31、および50での3つの販売と2つの購入(マーク16および36)です。
ロボットは、無制限の数のトランザクションを開くことができます。 たとえば、ある時点で、ロボットが複数の保留中の購入と販売を同時に行う場合があります。
取引完了規則
ロボットはすぐに取引を終了します:
- トランザクションの利益がパーセントで指定されたしきい値を超える-TakeProfit、
- またはトランザクションの損失(パーセント)は、対応する値-StopLossを超えています。
StopLossが0.2%であるとします。
この取引は、1061.50の価格での金の「販売」です。
金の価格が1061.50 + 1061.50 * 0.2%/ 100%= 1063.12%に上昇するとすぐに、取引の損失は明らかに0.2%になり、ロボットは自動的に取引を終了します。
ロボットは、次のXAUUSD見積もりの発行後、各時間の終わりに、個別の時点でトランザクションの開始/終了に関するすべての決定を行います。
はい、ロボットは非常にシンプルです。 同時に、その要件を100%満たしています。
- アルゴリズムは決定論的です。同じ価格データでロボットの動作をシミュレートするたびに、同じ結果が得られます。
- すなわち、十分な数の調整可能なパラメーターがあります。「高速」の期間と「低速」の移動平均の期間(自然数)、TakeProfitおよびStopLoss-正の実数、
- 4つのパラメーターのそれぞれの変更は、一般的な場合、ロボットの取引特性、特にその収益性に非線形効果をもたらします。
- 価格履歴でのロボットの収益性は初歩的なプログラムコードと見なされ、計算自体は数千の見積りのベクトルに対して1秒かかります。
- 最後に、しかし、これは無関係であり、ロボットは、その単純さをすべて備えて、実際には、インターネット上で著者が販売しているGrailが控えめな量よりも悪くないことを証明します。
入力パラメーターの準最適セットのクイック検索
単純なロボットの例を使用すると、ロボット設定のすべての可能なベクトルの完全な列挙は、4つの可変パラメーターでも高すぎることがわかります。 徹底的な検索の明らかな代替手段は、特定の戦略に従ってパラメーターベクトルを選択することです。 CFが最高に近づく(または選択するCFと達成する結果に応じて最小になる)最適な組み合わせを探して、可能なすべての組み合わせの一部のみを考慮します。
デジタルフィルターの準最適値のための3つの検索アルゴリズムを検討します 。 各アルゴリズムに対して、40のテスト(400の可能な組み合わせのうち)の制限を設定します。
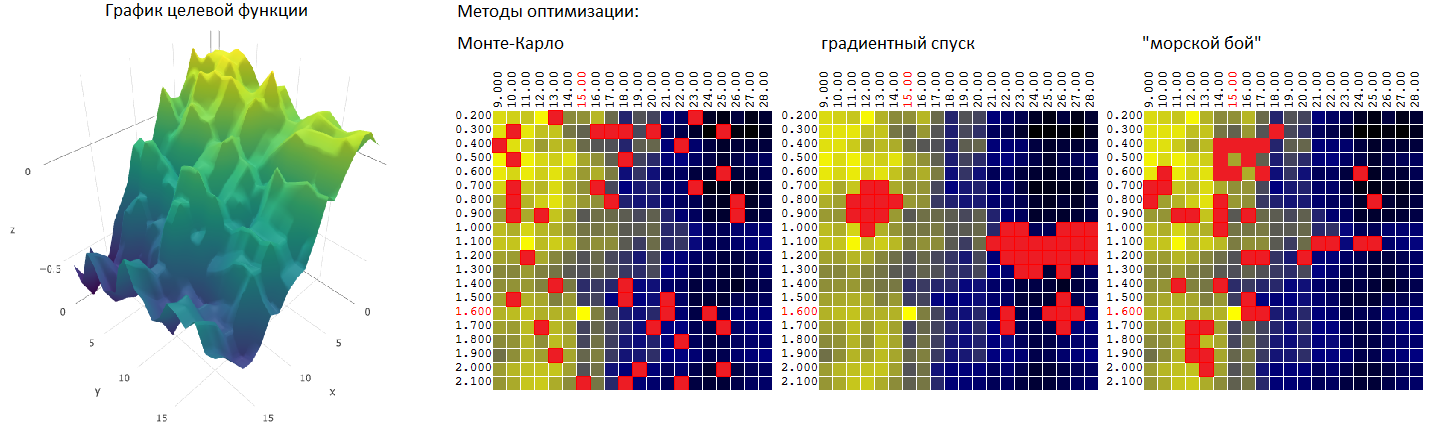
モンテカルロ法
または、Nに等しいセットの可能な数の中からM個の無相関ベクトルをランダムに選択します。この方法はおそらく最も簡単な方法です。 それを他の最適化手法と比較するための出発点として使用します。
例1
チャートは、時間単位の価格測定の履歴の年間セグメントで取得したEURUSDを取引するトレーディングロボットの利益(P)の、パラメーター値(「遅い」 移動平均 (M)の期間)への依存性を示しています。 他のすべてのパラメーターは固定されており、最適化されていません。
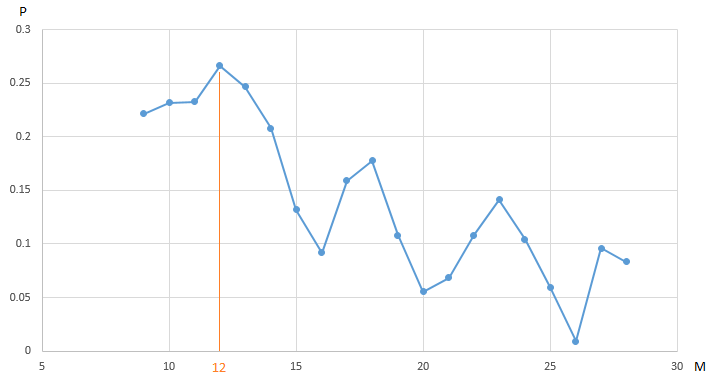
CF(利益)はポイントM = 12で最大0.27に達します。利益の最大値を保証するために、テストを20回繰り返す必要があります。 別の方法は、間隔[9、20]でパラメータMのランダムに選択された値を使用して、取引ロボットの少数のテストを実行することです。 たとえば、5回の反復(テストの合計数の20%)の後、パラメータの準最適ベクトル(ベクトル、明らかに1次元)が見つかりました。M= 18でCF(M)の値は0.18です。

最適化アルゴリズムのグラフ上の残りの値は、「戦争の霧」によって隠されていました。
残りのパラメーターの固定値を使用して、取引ロボットの4つのパラメーターの1つを最適化しても、全体像を見ることができません。 おそらく、他のパラメーターの値を変更する場合、0.27の最大CFはインジケーターの最適値ではありませんか?

これは、間隔[0.2 ... 0.8]のTakeProfitパラメーターのさまざまな値に対して、移動平均期間に対する利益の依存性がどのように変化するかです。
モンテカルロ法:2つのパラメーターの最適化
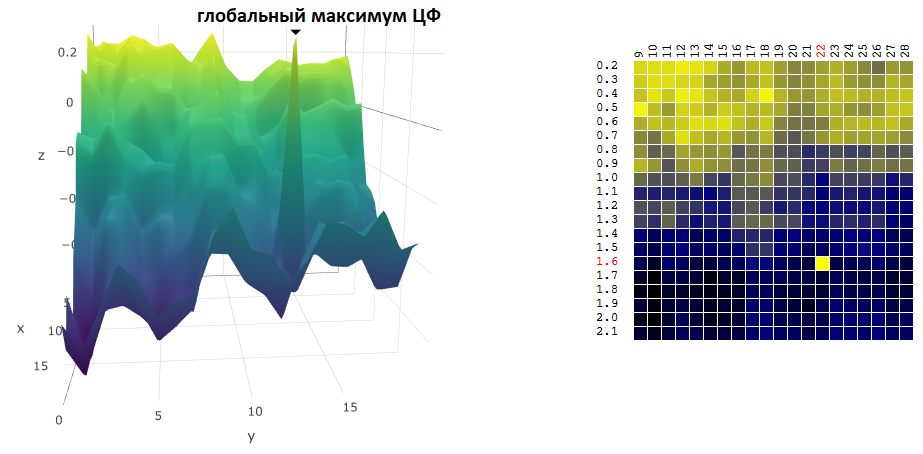
トレーディングロボットの利益が2つのパラメーターに依存することは、表面としてグラフィカルに表すことができます。

2つの軸はパラメーターT(TakeProfit)とM(移動平均の期間)の値であり、3番目の軸は利益値です。
トレーディングロボットの場合、1年のデータ間隔で400回のテストを実行した後(米ドルに対するユーロの時給6000時間の見積もり)、次のフォームの表面を取得します。

または、金融資産(利益、P)の値が色で表される平面上:

平面上の任意の点を選択すると、この例では、アルゴリズムは最適な値を見つけられませんでしたが、かなり近い値になりました。

モンテカルロ法は最大のDFを見つけるのにどのくらい効果的ですか? 上記の例からソースデータの最大DFを見つけるために1,000回の反復を実行すると、次の統計が得られました。
- 1,000回の最適化の反復中に見つかったDFの最大値の平均値(400の可能な組み合わせのうち、パラメータ[M、T]の40のランダムベクトル)は0.231またはDFのグローバル最大値(0.279)の95.7%でした。
明らかに、取引ロボットのパラメトリック最適化の方法を比較する場合、1つのサンプルは指標ではありません。 しかし、今のところ、この評価で十分です。 次の方法である勾配降下法に進みます。
勾配降下法
正式には、名前が示すように、メソッドはDFの最小値を検索するために使用されます。
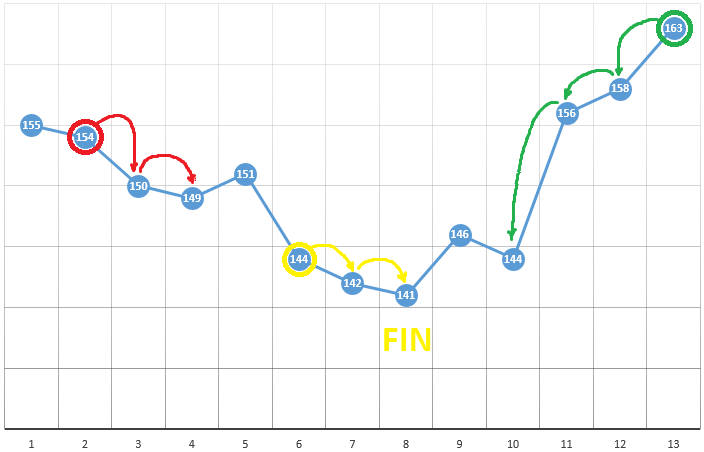
この方法に従って、座標[x0、y0、z0、...]で開始点を選択します。 1つのパラメーターの最適化の例では、これはランダムに選択されたポイントになります。
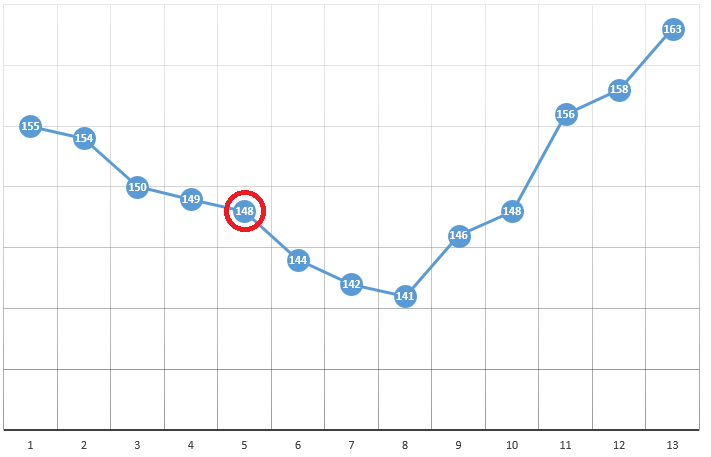
座標[5]およびDF値148を使用します。以下は3つの簡単なステップです。
- 現在位置の近くのCF値を確認する(149および144)
- CF値が最小のポイントに移動する
- これが存在しない場合、ローカル極値が見つかった場合、アルゴリズムは完了します

2つのパラメーターの関数としてDFを最適化するには、同じアルゴリズムを使用します。 以前に2つの隣接ポイントでCFを計算した場合 [xi−1]、[xi+1] 、4つのポイントを確認します。
[xi−1、yi]、[xi+1、yi]、[xi、yi−1]、[xi、yi+1]
テスト空間のDFに極値が1つしかない場合、この方法は間違いなく優れています。 複数の極値がある場合、グローバルな極値を見つける確率を高めるために、検索を数回繰り返す必要があります。
この例では、 最大 CFを探しています 。 アルゴリズムの定義内にとどまるために、最小の「マイナスDF」を検索していると想定できます。 すべて同じ例、移動平均の期間の関数としての取引ロボットの利益とTakeProfit値、1回の反復:
この場合、CFのグローバル最大値からはほど遠いローカル極値が見つかりました。 勾配降下法によるCFの極値の検索のいくつかの反復の例では、CFの値は40回計算されます(400のうち40点が可能)。

次に、モンテカルロ法と勾配降下法アルゴリズムを使用して、初期データでCF(利益)のグローバルな最大値を検索する効率を比較しましょう。 それぞれの場合、40回のテストが実行されます(CF計算)。 各方法で1,000回の最適化の反復が実行されました。
| モンテカルロ | 勾配降下 | |
|---|---|---|
| 得られたCFの準最適値の平均 | 0.231 | 0.200 |
| CFの最大値から取得した値 | 95.7% | 92.1% |
表からわかるように、この例では、勾配降下法は、そのタスク-CFのグローバルな極値を検索する-最大利益を悪化させます。 しかし、私たちはそれを捨てようと急いでいません。
取引アルゴリズムのパラメトリックな安定性
デジタルフィルターのグローバルな最大/最小の座標を見つけることは、多くの場合、最適化の目標ではありません。 グラフ上に「鋭い」ピーク-グローバルな最大値があり、その付近のCF値がピーク値よりはるかに低いと仮定します。
見つかったデジタル資産の最大値に対応する取引ロボットの設定を選択したとします。 少なくとも1つのパラメーターの値(移動平均および/またはTakeProfitの期間)の値をわずかに変更すると、ロボットの収益性は急激に低下します(マイナスになります)。 実際の取引に適用されるように、少なくともロボットが取引される市場は、取引アルゴリズムを最適化した歴史の期間とは著しく異なると予想できます。
したがって、取引ロボットの「最適な」設定を選択する場合、DFの検出された極値点の近くで設定の変更に対するロボットの感度を把握することは価値があります。
明らかに、勾配降下法は、原則として、極値付近のTFの値を提供します。 モンテカルロ法は、正方形にヒットする可能性が高くなります。
自動取引戦略をテストするための複数の手順では、最適化が完了した後、見つかったパラメーターベクトルの近くでロボットのターゲットインジケーターをチェックすることをお勧めします。 しかし、これらは追加のテストです。 さらに、設定のわずかな変更で戦略の収益性が低下した場合はどうなりますか? 明らかに、テストプロセスを繰り返す必要があります。
アルゴリズムは、DFの極値の検索と一緒に役立つ場合があり、見つかったピークに関して狭い範囲で設定を変更するためのトレーディング戦略の安定性を評価できます。 たとえば、最大CFを直接検索しないでください
P=f(mi、ti)、
目的関数の隣接値を考慮した加重平均値。ここで、重みは隣接値までの距離に反比例します(2つのパラメーターx、yおよび目的関数Pを最適化するため)。
P′(xi、yi)= fracwi timesP(xi、yi)+wj timesP(xj、yj)+wk timesP(xk、yk)+...wi+wj+wk+...
wj= sqrt(xj−xi)2+(yj−yi)2
wi+wj+wk+...=1
つまり、パラメーターの準最適ベクトルを選択すると、アルゴリズムは「平滑化された」目的関数を評価します。
だった
になっています
「海戦」の方法
両方の方法の利点(モンテカルロ法と勾配降下法)を組み合わせて、「海戦」のゲームのアルゴリズムに似たアルゴリズムを試しました。
- まず、私は全体の領域にいくつかの「打撃」を打つ
- それから、「ヒット」の場所で私は大規模な火を放ちます。
つまり、最初のN個のテストは、入力パラメーターのランダムな非相関ベクトルで実行されます。 これらのうち、M個の最良の結果が選択されます。 これらのテストの近く(プラス-各座標への分0..L)で、別のKテストが実行されます。
例(400ポイント、合計40回の試行)の場合:
そして再び、現在3つの最適化アルゴリズムの有効性を比較します。
| モンテカルロ | 勾配降下 | 「海戦」 | |
|---|---|---|---|
| グローバル値の割合として検出されたCFの極値の平均値。
40回のテスト、1,000回の最適化反復 | 95.7% | 92.1% | 97.0% |
結果は励みになります。 もちろん、比較はデータの特定のサンプルで実行されました。つまり、米ドルに対するユーロの価値の1つの時系列での1つの取引アルゴリズムです。 しかし、ソースデータのより多くのサンプルでアルゴリズムを比較する前に、別の、予想外に(不当に)取引戦略を最適化するための一般的なアルゴリズム - 遺伝的アルゴリズム (GA)最適化についてお話します。 ただし、この記事は膨大すぎるため、GAは次の公開まで延期する必要があります。