
ホテルや遊園地にはドローンショーが必要です。 アーティストと花火は良いですが、十分ではありません。 ゲストのために明るい何かを考え出す必要があります。 ドローンショーはまさにそのようなオプションです。 1つの外国の遊園地で定期的にドローンショーを開催するプロジェクトに参加しました。
そして今、私たちはロシアで同じショーを行う方法を知っています。
フリート内の300台または1,000台の車両の群れに関しては、位置決め精度(つまり、地面および互いに対する各ドローンの位置)は特別な役割を果たしません。 これは回転する質量であり、粒子は互いに数メートルの距離にあります。 非常に高価な質量。 プラスまたはマイナスのメーターはここでは重要ではありません。視聴者が遠くにいるため、そしてドローンが本当にたくさんあるので、彼らはそれを取ります。 たとえ数個が落ちても-大丈夫です。 しかし、ここのホテルや公園など、それほど大規模ではないイベントの主催者は、20〜90個のドローンを必要とします。ここでは、位置付けが重要です。
この場合、精度と同期のみを取ることができます。 この問題を解決しました。
なぜ、どのようにそれがすべてでしたか
CROCにはロボット部門があります。 2012年に登場し、さまざまな興味深いことに取り組んでいますが、主な方向性はUAVコントロールです。 ドローンを制御し、非標準のタスクを解決するために、独自のソフトインクを削減しています。 2013年大会の参加者は、 このコードをGitHubで知っているかもしれません。 このコードは、飛行ドローン大会でドローンを制御するために開発し、使用しました。 当時、私たちは市場の新しい課題を解決していました-ドローンを適切な場所で凍結させ、コーナーや障害物を慎重に回避しました。 今日これはばかげているようだ。
さらに、SPH Engineeringソフトウェアを含むベンダーソフトウェアに基づいたUAV管理プロジェクトを行っています。 UgCSソフトウェア地上局と大型ドロノフロット向けの本格的なコマンドセンターの両方があります。 UgCSは無人車両の大きなグループを制御できるため、従来の地上管制局とは異なります。 管理とは、たとえば、救助活動やセキュリティ境界線を飛行するための飛行ルートの計画、リモートコマンドの送信、車両の状態の監視を意味します。 実際、ドローンショーでは、コマンドセンターとほぼ同じ機能が必要です。 そして今、UgCSプラットフォームに基づいて、高度に専門化されたDrone Dance Controllerソフトウェアが登場しましたが、これはすぐではありませんでした。
そしてどうでしたか
柔らかい 私のパートナーと私が短期間でテストした最初のバージョンでは、ほとんどの民間ドローンの標準機能、つまり特定のルートに沿って飛行することを使用しました。 ルートとは、一定の速度でドローンが直線的に移動し、道路に沿って何か有用なことを行う座標のセットです。 ドローンによって解決されるほとんどのタスクについては、そのような飛行計画は十分すぎるほどです。 ただし、少なくとも時刻同期は行われていません。つまり、ドローンを適切なタイミングで特定のポイントに配置することは困難です。これはグループフライトに不可欠です。 ただし、最初のバージョンは、すぐにビルドして飛行を開始するための最初のバージョンです。 ルートを標準的な方法で(もちろんUgCSで)描画し、ドローンにロードします-そして転送します。
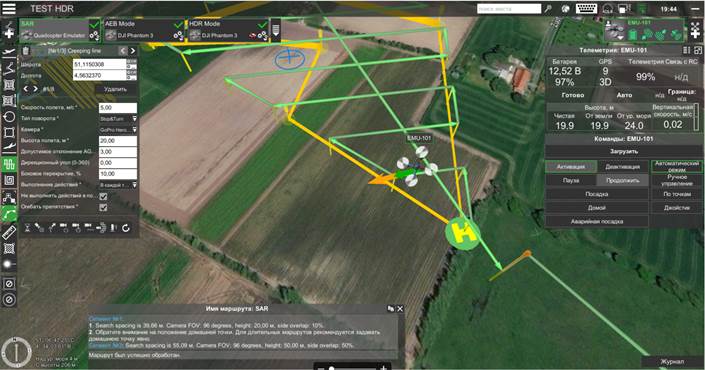
予想どおり、額にフライトの同期が行われました。 無人機のルートでは、無人機が停止し、地上からのコマンドが飛行を継続するのを待つポイントが特定されました。 それらを同期ポイントと呼びました。 地上のオペレーターは、すべてのドローンが同期ポイントに到達したことを確認し、「継続」コマンドを送信して飛行を継続する必要がありました。
鉄 最初のバージョンでは標準タイプのルートのみを使用していたため、さまざまなメーカーのドローンを使用できました。 しかし、すぐにターゲットプラットフォームを修正し、すべてのテストを実施することにしました。
当時、販売中のショーのドローンはありませんでした。 執筆時点ではありませんが、すぐに登場することを期待しています。 それまでは、自分で収集する必要があります。 450mmフレームに基づいてそれらを収集し、自動操縦装置としてオープンソースのPixhawkを選択しました。一方で、ハードウェアとファームウェアの両方で手を離しました。 一方、ユーザーが必要なすべてのコンポーネントを簡単に購入して、適切な製品を自分で組み立てられるようにします。 しかし、一般的に、オートパイロットのみが厳密に修正されています。 他の構造要素はオプションです。
そして重要なポイント-私たちはすぐにGPS RTKテクノロジーに集中し始めました。 地上ベースの基地局に対するセンチメートル精度の測位を実現できます(従来のGPS精度3+メートル)。
はい、GPS RTKはすべてのデバイスを複雑にします。これは、地上局からデータを絶えず送信する必要がある各デバイスに搭載されたGPS RTKサポートを備えた受信機の可用性を必要とするためです。 しかし、なすべきことは何もありませんでした。私たちと私たちのクライアントはすぐに大規模な艦隊に到着しないことを理解していました。 数百および数千のドローンが空中にあるため、各ドローンの位置が目にとってそれほど重要ではない、美しい大規模な体積図を描くことができます。 そして、何十ものドローンで何を描くことができますか? ほとんどの場合、これらはいくつかの小さな単純な幾何学的図形とその変換であり、飛行の精度は絶対に重要です。 大ざっぱに言えば、ドローンは目を楽しませて、傷を付けずに直線に並ぶことができるはずです。
さらに、アトランタのドローンにはRGB LEDが搭載されています。 彼らの仕事はミッションに組み込むことも、地上から制御することもできますが、同時に、無線チャネルの追加の負荷を考慮する必要があります。 ただし、LEDの代わりに、無人機は火工品を運ぶことができますが、もちろん、非常に注意する必要があります。
これは、鉄とソフトウェアの最初のバージョンでの最初の飛行の1つの例です(花火だけで)。 通常の線もはっきりと見えます(まあ、わかりました、わかりました。まだ作業がありました)。そして、手動同期。 つまり、ショー中に約40〜50回、オペレーターが「さらに先に行こう」をクリックすると、次のチームがドローンに全員に送られました。
しかし、既に何かが飛んでいます。
したがって、顧客は毎日のショーのシーズンから飛び立った。
今どのように動作します
実際には、最初のバージョンは最も成功したソリューションではなかったはずです。 まず、一定の手動同期の存在は悪です。 たとえば、無線通信が不十分なため、Continueコマンドがドローンに到達しない場合があります。 この場合、誰もが飛び去り、貧しい人である彼は残ります。 第二に、複雑なルートを作成することは不可能です。これにより、アニメーションペインティングの作成が妨げられ、静的なシーンのみが可能になります。
これですべてが簡単になりました。約半年前に、ベンダーはソフトウェアの特別なバージョン、たとえばDrone Dance Controllerをリリースしました。 ここで、彼は自動操縦に対して少し魔法をかけ、GPS時間を明確に参照しながら、任意の軌道に沿って自律的に飛行するように教えました。 軌跡は、3Dエディターまたはスクリプトを使用して準備できます。 オペレーターは、「開始」ボタンをクリックして喫煙をやめる必要があります。 出力は次のようになります。
またはこれ:
しかし、肺を台無しにする前に、チームはショーの準備の重要な段階を完了する必要があります。
そのため、まず、艦隊を準備する必要があります。すべてのドローンが致命的な状態にあり、正しく構成されており、輸送中にドローンから何も落ちていないことを確認してください。
これと並行して、ショー自体を準備する必要があります。 Blenderなどの3Dエディターで実行できるアニメーションから始めます。
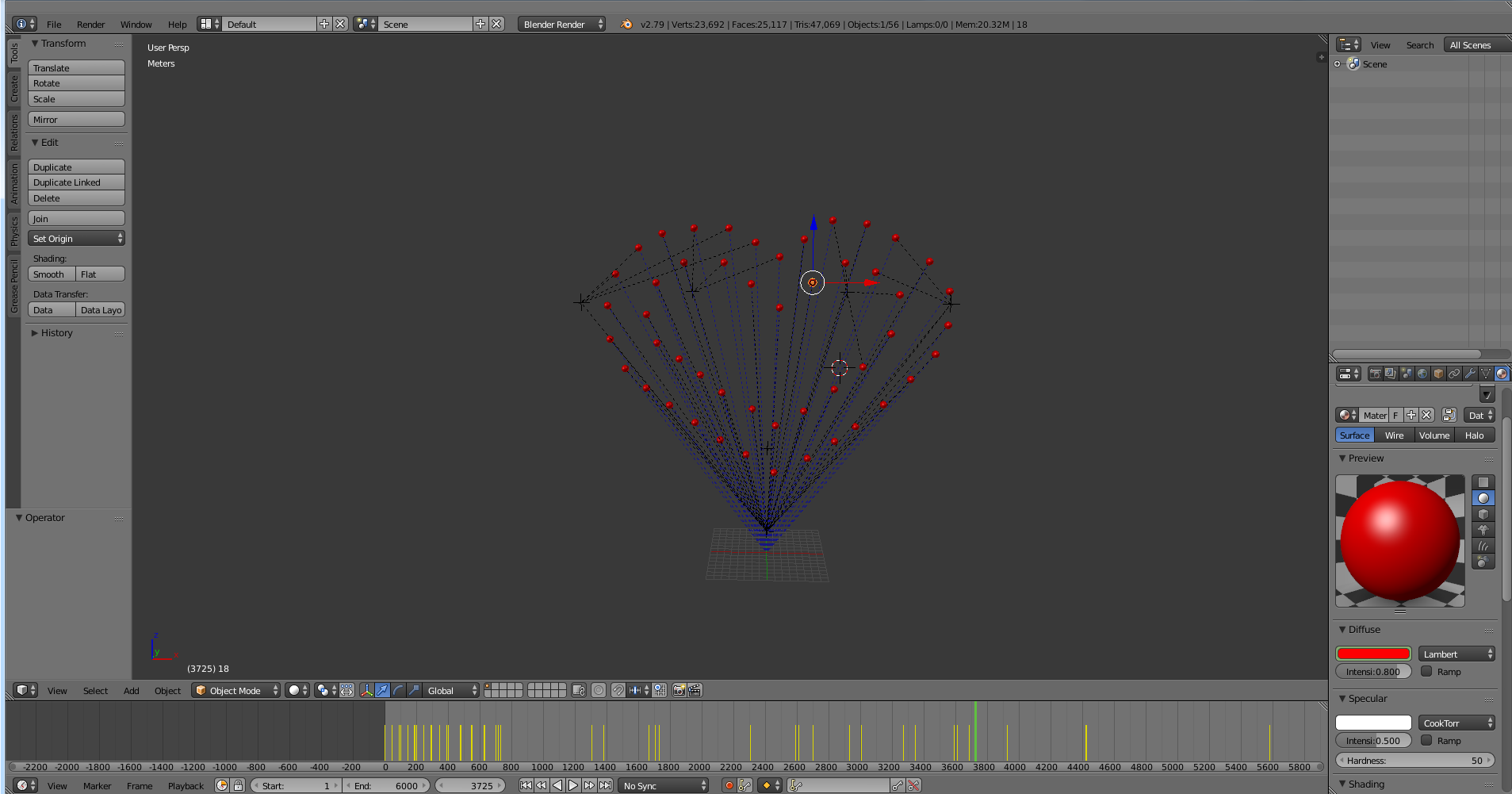
次に、アニメーションの軌跡を自動操縦で理解できる形式に変換します。 そして、フィールドに飛ぶために出発する前に、結果の評価でシミュレータを注意深くチェックします。 シミュレーションにより、仮想ドローンを必要な座標に配置し、実際のデバイスと同様にソフトウェアでそれらを操作する機会が与えられます。 飛行をリアルタイムで評価したり、動きを後処理したり、結果を何らかの3Dシーンで視覚化したりできます。
ビデオ-さまざまな視点からの視覚化の例。
視点:ビューアー
視点:起動パッド
視点1
視点2
その後、テスト実行のためにフィールドに移動します。 インフラ(地上局、通信)を展開し、無人機を配置します。 輸送が良好であり、すべてのドローンがステーションに接続されていることを確認します。 さらに、ソフトウェアは、どの経路でどのドローンを飛行させるかを自動的に決定します。 開始時間を設定します-そして先へ。
そして-そしてショー自体。
もちろん、「禁煙」について-それは冗談でした。 飛行中に直接、オペレーターとオブザーバーは艦隊の現在の状態を監視し、必要に応じて、失敗した(あらゆる意味で)無人機の緊急着陸に関する決定を下す必要があるためです。
もちろん、いくつかの制限があります。
天気:雨や雪の中を飛ぶことはなく(今のところ)、5 m / sを超える風はあまり好きではありません。 ドローンが10 m / sで飛行することは明らかですが、位置を保持する精度はあまり良くないかもしれません。
ドローンとの通信に使用される周波数では、空気は比較的自由でなければなりません。
安全性:一般的に言えば、ドローンは落下する可能性があるため、視聴者はショーの会場から一定の距離を移動する必要があります。
計画を立てる際には、これらすべてを考慮する必要があります。
合計
ドローンの群れを収集し、UgCSソフトウェアを購入し、当社から推奨事項を取得して、飛行を開始できます。 あなたがすでにドローンの繁殖に特定の能力を持っているなら、すべては非常に難しくさえありません。 ライセンスとソフトウェアの実装に関する推奨事項を取得してから24時間後に、20台のドローンでテストダンスを上げた人たちを知っています(既に艦隊を持っていますが)。 能力はないが、そのようなショーをしたい場合は、当社のエンジニアがそのようなプロジェクトを実施し、すべての専門家を訓練し、それをサポートし続けることができます。 1回限りのショーから飛び立つ必要がある場合は、書き込みも行います。
参照資料
- ソフトウェアUgCS。
- ドローンコンテストについて(結果)
- 私のメールはALevandovskiy@croc.ruです