カーネギーメロン大学のスタートアップは、将来の車でラジオを使用して交差点を運転する予定です

寿命は短く、交通量はさらに短いようです。 または、信号に立っているとき、赤が点灯し、誰も交差道路に沿って運転していません。
メキシコシティ、サンパウロ、ローマ、モスクワ、北京、カイロ、ナイロビなどの都市の郊外では、仕事までの朝のドライブは2時間を超えることがあります。 ここに職場からの帰り道を追加すると、人々は毎日3-4時間を道路で過ごすことがよくあります。
たとえば、1日の往復を3分の1、つまり3時間から2時間に短縮するシステムを開発できると想像してください。 これにより、月に22時間、35年のキャリアで3年節約できます。
そのようなシステムはすでに開発されており、いくつかの最近の技術に基づいているため、不幸な旅行者を仕事や家に持ち帰ってください。 それらの1つは、車間の無線通信です。 交通信号やその他のインフラストラクチャもこの接続に含まれる場合がありますが、多くの場合、V2V(車車間)テクノロジと呼ばれます。 別の新しい技術はロボモービルであり、それは本来、仕事に行く時間を短縮する(そしてこの時間をより生産的にする)はずです。 また、モノのインターネット (IoT)もあります。これは、70億人だけでなく、300億人のセンサーとデバイスをまとめることを約束します。
これらの技術はすべて、同僚と私がピッツバーグのカーネギーメロン大学で開発したアルゴリズムを使用して、連携して動作するようにできます。 このアルゴリズムにより、車はオンボードメッセージングシステムを使用して連携し、信号機を使用せずに車をスムーズかつ安全に移動できます。 このプロジェクトでは、Virtual Traffic Lights [仮想信号機](VTL)という会社を登録し、シミュレーションでアルゴリズムを注意深くチェックしました。2017年5月から、このプロジェクトは大学のキャンパスの近くで機能しています。 7月、サウジアラビアのVTLテクノロジーを初めて公開し、100人以上の科学者、政府関係者、民間企業の代表者が参加しました。
テスト結果は、私たちがすでに疑っていたことを確認しました。信号機を拒否する時でした。 失うものは何もありませんが、交通量の多い車に座って数え切れないほどの時間を過ごします。
このデバイスは1912年に発明され、ソルトレイクシティで導入され、2年後にクリーブランドで導入されて以来、信号機の動作原理はそれほど変わりません[ 最初の電気信号機について話していることを明確にする価値があります。 手動駆動を備えた最初のデバイスは、19世紀にロンドンで発明されました。 perev。 ]。 タイマーで作動するため、交差点で赤く立ち、近くの他の車が見えないことがあります。 タイマーは1日のさまざまな時間の動きのパターンに一致するように調整できますが、実際にできることはそれだけです-そしてそれほど多くはありません[ 著者はここでunningしています-トラフィックをキャプチャするカメラを備えた自動交通制御システムがあります人々が交通渋滞を監視するセンターからの遠隔交通管制システム perev。 ]。 その結果、多くの人が毎日多くの時間を費やしています。
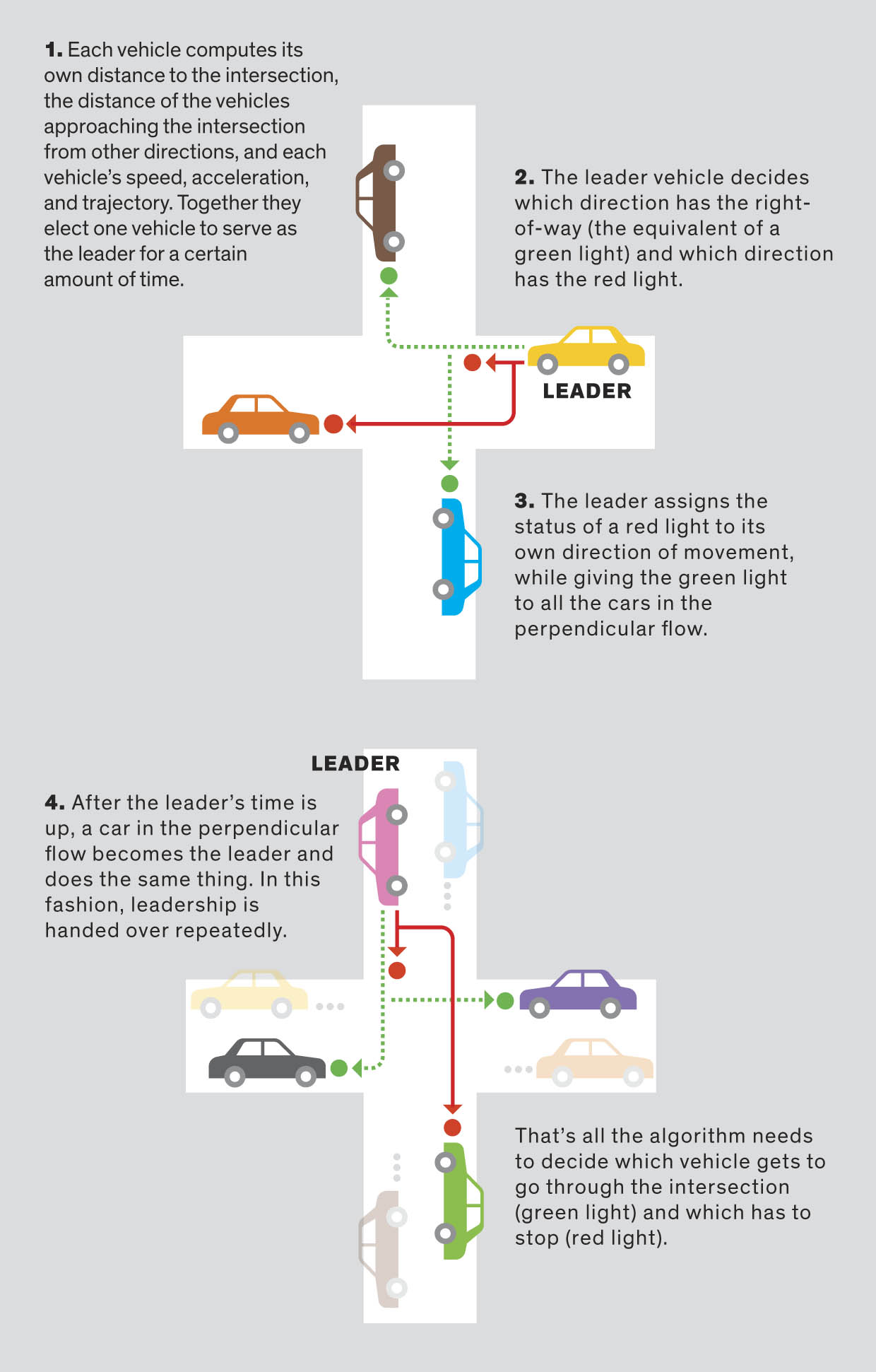
代わりに、数台の車が交差点まで走り、V2Vテクノロジーのおかげでデータを交換していると想像してください。 彼らは共同で投票を行い、一定期間リーダー車を選択します。リーダー車は、メインになる方向(緑色の光に相当)を決定し、どの方向に「赤が輝く」かを決定します。
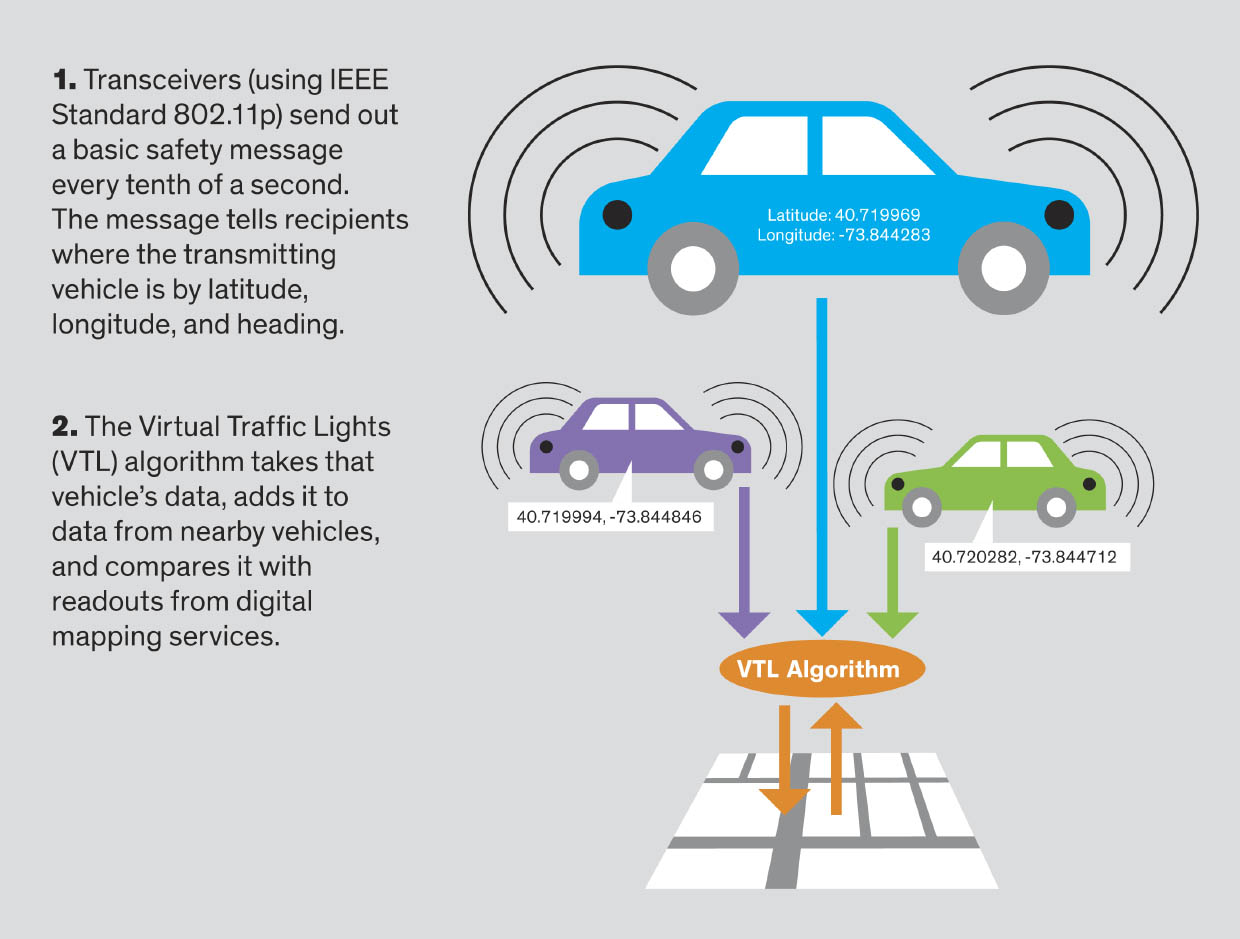
IEEE 802.11pトランシーバーは、1秒間に10回メッセージを送信します。 メッセージには、機械の座標と移動方向が示されます。
アルゴリズムはデータを受信し、他のマシンのデータに追加して、デジタルカードと比較します。
そして、主要道路は誰ですか? すべては非常に単純かつ敬意をもって行われます。 リーダーは、移動方向に赤信号のステータスを割り当て、垂直に走行するすべての車に緑信号を与えます。 たとえば、30秒後、垂直流の別のマシンがリーダーになり、同じことを行います。 リーダーの地位は共通の利益のために個人的な利益を犠牲にすることに関係しているため、責任と負担を正直に分かち合うために、リーダーは常にあちこちに移されます。
このアプローチでは、信号機は必要ありません。 トラフィック制御機能は、ワイヤレスインフラストラクチャでシームレスに解消されます。 交差道路を運転している人がいなければ、車に座って赤信号に立っていません。
VTLアルゴリズムは、交差点への各入口から前の車までの距離、車の速度、各道路の車の数などのパラメーターを調べることにより、リーダーを選択します。 他の条件が同じであれば、アルゴリズムは交差点から最も離れた場所にある車を選択し、ブレーキをかける時間を確保します。 このルールにより、ラウンドアバウトに最も近い車両が優先的に道を譲ります。つまり、仮想の緑色のライトです。
テクノロジーはカメラ、レーダー、ライダーを必要としないことに注意することが重要です。 専用の短距離通信( DSRC )で動作するワイヤレスシステムからすべての情報を受信します。 これらは、1999年から2008年に米国、ヨーロッパ、および日本で開発され、近くの車が互いに通信できるようにする無線回線と専用の通信チャネルです。 DSRCの開発者は、有料道路の使用のためのお金の徴収や協調的な適応クルーズ制御など、標準を使用するためのさまざまなオプションを提案しました-交差点での衝突を避けるためにそれを使用する機能そのものです。
工場から、DSRCシステムは少数のマシンに配置されます(そして、おそらく、新しい5Gテクノロジーがそれを置き換えます )。 しかし、そのようなトランシーバーは購入でき 、必要なすべての機能を備えています。 IEEE標準802.11pを使用し、1秒間に10回メッセージを送信する必要があります。 メッセージは、車両の移動の座標と方向を示すものとします。 車のコンピューターで動作するアルゴリズムは、車のデータを受信し、近隣の車から受信したデータを追加して、Googleマップ、Apple Maps、OpenStreetMapなどのデジタルカードに結果を課します。
このようにして、各車は交差点までの距離と、他の方向から接近する他の車までの距離を計算できます。 また、各マシンの速度、加速度、軌道を計算できます。 そして、これがアルゴリズムが交差点を通過する人(緑色のライト)と停止する必要がある人(赤)を決定するために必要なすべてです。 その後、各車のダッシュボードには、各ドライバーの信号機の色が表示されます。 もちろん、VTLアルゴリズムは交差点での交通制御の問題、「停止」および「道を譲る」という標識の定義のみを解決します。 彼は車を運転しません。 しかし、その分野で働いているVTLは、必要なことを何でも行うことができ、完全に自動化された自動車技術よりもはるかに安価です。 Robomobileには、ライダー、レーダー、カメラ、その他のセンサーからのデータを把握するだけでなく、それらを組み合わせて周囲の空間の画像を取得するために、より多くの計算能力が必要です。 VTLはロボット技術と競合せず、それらを補完します。
私たちの方法は、実用的なルールを真のインテリジェンスに置き換えるものと考えることができます。 このアルゴリズムにより、昆虫のコロニーや魚の群れの場合と同様に、マシンがトラフィック自体を制御できます。 魚の群れは同時に、移動の方向を変えます。主な交通管制官が個々のメンバーに指示することはありません。 各魚は、近隣の魚から移動情報を受け取ります。
これは、集中ネットワークの代替としての分散システムの動作の例です。 その助けを借りて、市内の自動車は、警察、信号機、一時停止標識、「道を譲る」ことなく、集中管理と人間の介入なしに、交通を個別に調整できます。
スマート交差点の概念を発明したのではなく、数十年前から存在しています。 最も初期のアイデアの1つは、アスファルトの表面の下に磁気コイルを設置することでした。これにより、車が交差点に近づく方法を決定し、緑と赤のフェーズの期間を調整します。 また、交差点でカメラを使用して、接近する車を計算し、信号機のフェーズの最適な時間を計算することもできます。 ただし、どちらのテクノロジーもインストールと保守に費用がかかるため、ほとんど交差点にインストールされていません。
まず、米国のピッツバーグとポルトガルのポルトの2つの都市の仮想モデルにVTLアルゴリズムを導入しました。 米国国勢調査局と関連するポルトガルの代理店から交通データを取得し、Google Mapsから地図を追加し、SUMO(都市交通シミュレーター、都市交通シミュレーター)-ドイツ航空宇宙センターが開発したオープンソースソフトウェアにすべてを供給しました。
SUMOは2つのシナリオでラッシュアワーをシミュレートしました。1つは既存の信号機を使用し、もう1つはVTLアルゴリズムを使用します。 VTLは、ポルトの平均移動時間を35分から21.3分に、ピッツバーグの30.7分から18.3分に短縮することがわかりました。 郊外から市内に入った人の移動時間の短縮は、30%以上、最大60%減少しました。 重要なのは、移動時間の変動—平均からの量の偏差—も減少したことです。
リーダーの選択スキーム
時間は2つの理由で節約されます。 第一に、VTLは、交差道路を誰も運転していない場合の赤信号での待ち時間をなくします。 次に、VTLは、アクティブな信号がある場所だけでなく、すべての交差点でトラフィックを制御します。 したがって、近くに他の車がなかった場合、車は、たとえば、一時停止の標識がある場所で停止する必要はありませんでした。
私たちのシミュレーションは他の利点を実証しました-時間を節約することよりもさらに重要かもしれません。 交通事故の件数は70%減少し、ほとんどの場合、交差点と一時停止標識で減少が発生しました。 また、信号機の前に立って、加速し、ブレーキをかける時間を最小限に抑えることにより、VTLは自動車からの二酸化炭素排出量を大幅に削減します。
VTLを研究室から現実の世界に転送するには何が必要ですか? まず、製造された車にDSRCを組み込む必要があります。 2014年、米国国道交通安全局はこの技術の使用を提案しましたが、トランプ政権はまだ適切な規則を開発しておらず、最終的な解決策が何であるかはまだ明確ではありません。 そのため、米国のメーカーはDSRCトランシーバーをマシンに統合することに消極的です。コストを増やし、他のマシン上にある場合にのみ有用であるためです-標準的な鶏と卵の問題です。
十分な数のマシンにこのようなデバイスが装備されるまで、生産規模は低くなり、コストは高くなります。 米国では、ゼネラルモーターズだけがDSRCラジオを車に統合し始め、それらはすべて高価なキャデラックモデルです。 しかし、ヨーロッパと日本では、状況はよりポジティブです。 多くのヨーロッパの自動車メーカーは、これらのトランシーバーを自動車に統合することを決定し、今年は政府が技術の使用を提唱する日本で始まり、製造大手のトヨタはこのステップの準備ができていることを繰り返し確認しました。
しかし、DSRCで何も起こらない場合でも、5GやWi-Fiなどの他のワイヤレステクノロジーに基づいてアルゴリズムを構築できます。
トランシーバーの不完全な侵入という概念は、VTL実装の最大の障害の1つという問題を提起します。 ほんの一部の車に送信機が装備されていれば機能しますか? はい、当局が既存の信号機にこの技術を装備することに決めた場合。
当局は、数千億ドルに相当する既存のインフラストラクチャを放棄しないように、その場合のみ、これを行うことを望むかもしれません。 この問題に対する短期的なソリューションを提供します。既存の信号機を更新して、道路上にDSRCを搭載した車の存在を認識し、それに応じて緑と赤のフェーズを設定できます。 このスキームの利点は、ラジオの存在に関係なく、すべての車が道路と交差点を使用できることです。 このアプローチは、理想的なソリューションほど時間を短縮しないかもしれませんが、ピッツバーグでのシミュレーションとフィールドトライアルによると、現在の交通制御システムよりも23%優れています。
もう1つの問題は、歩行者や自転車の扱い方です。 すべての車とトラックにトランシーバーを強制装備しても、それらがサイクリストによってセットアップされ、歩行者によって運ばれることは期待できません。 このため、人々が忙しい交差点を安全に横断することは困難です。
信号機とVTLが共存している期間の短期的な解決策は、歩行者に自分の主要道路を整備する機会を与えることです。 ピッツバーグでのパイロットプログラムでは、交差点の4辺すべてに、赤信号を点灯するボタンを配置しました。これは歩行者にとってはリアルで、車にとってはバーチャルです。 このシステムは、アクティブ化されるたびに機能しました。
長い目で見れば、サイクリストと歩行者の問題は、モノのインターネットの助けを借りて解決できます。 IoT拡張により、誰もがDSRCをサポートするデバイスを常に持ち歩くときが来ます。
それまでの間、理想的な条件下では、物理的な信号がなくても、優先権を行使する車は歩行者にサイクルの一部を割り当てることができることを実証しました。 シフト中、交差点へのすべての入り口のすべての車で仮想赤信号が点灯し、歩行者が安全に道路を横断するのに十分な時間続きます。 この予備的な解決策は、高密度の流れには最適ではないため、車のダッシュボードに取り付けられた安価なカメラを使用する方法に取り組んでいます。これは、歩行者に気付き、道を譲るのに役立ちます。
有望な仮想信号機の技術は、ロボモービルの時代のアプローチになります。 今日、そのような車は、人間のドライバーが行うすべてのことを行うと想像しています:信号で止まる、「道を譲る」標識で道を譲るなど。 しかし、なぜ自動化を半分に実施するのでしょうか? そのような機械が通常の兆候や信号なしで完全に独立して動きを制御できれば、はるかに良いでしょう。 これを達成するための鍵は、V2Vとこれらの通信のインフラストラクチャです。
これは重要です。今日のロボモービルは、混雑した交差点をナビゲートして運転できないことが多いためです。 これは最も困難な技術的問題の1つであり、Waymo業界のリーダーでさえ悩み続けています。
シミュレーションとフィールドトライアルで、VTLを搭載したロボット車両が信号機や標識なしで交差点の交差点を制御できることがわかりました。 これらのオブジェクトを認識する必要がないため、コンピュータービジョンアルゴリズムとそれらを実行するコンピューターが大幅に簡素化されます。これは、今日の実験的なロボモービルが依存しています。 これらの要素とセンサー(特にLIDAR)の合計は、ロボモービルの最も高価な部分です。
VTLのソフトウェアアーキテクチャはモジュール式であるため、robomobileソフトウェアに簡単に統合できます。 さらに、VTLは、コンピュータービジョンに関連する最も難しい問題のすべてではないにしても、ほとんどを解決することができます。たとえば、太陽がカメラに差し込んだり、雨、雪、砂嵐、道路の曲がりが視界を遮る場合などです。 もちろん、VTLはロボット技術と競合しません。 それを補完します。 そして、これだけでロボモービルの道路への撤退を加速することができます。
しかし、この時点よりずっと前に、私たちのシステムが人々が制御するマシンで動作することを願っています。 すでに今年の7月に、サウジアラビアのリヤド市で、43℃の熱で、試験機にデバイスを取り付けて、この技術の公開デモを行うことができました。 政府、学界、およびUberを含む企業は、メルセデスベンツバスに乗り、キングアブドゥルアズィーズの科学技術キャンパスを走り、3つの交差点を横断しました。 バス、GMCトラック、ヒュンダイSUV、シトロエン乗用車はあらゆる方法でこれらの交差点を通過し、VTLシステムは毎回正常に機能しました。 1人のドライバーが赤信号に特に従わず、交差点を渡ろうとしたとき、セキュリティシステムは他の接近するすべての車に赤の点滅を表示することで機能し、事件を防ぎました。
この瞬間が輸送管理システムのターニングポイントになったことを願っています。 信号機が機能しました。 そして実際、それらは100年以上も存在しています。 次のステップに進みましょう。