私はaと同じくらい簡単なことをするのが好きですが、同時に、たとえば9年前の最後の記事- ハードドライブからUbuntu Linuxをインストールするなど、非常に便利です。 スクリプト 、そして今、そのような活動の時が来ました。
カッターの下には、Arduinoと安価で手頃な手段に基づいてコーヒーマシンへのきれいな新鮮な水の供給を自動化する方法の詳細な指示があり、外部通信への接続を提供しないコーヒーマシンのパレットからの液体の排水を整理します。
背景と動機
物語は、SKYFが巨大なクアドロコプターを製造している小さいながらも非常に誇りのある会社でコーヒーマシンを購入したということです。最寄りの上下水道通信は100メートル先にありました。 手術中、30人のチームが10杯以下のコーヒーを入れるためにドリップトレイを満たし、その後、 サバントゥイのようにスプーンで卵をこぼさないように、水で満たされたトレイと平衡を保って、3つのドアを通過しなければなりませんでした。カーペット敷きの床、特にズボンには落ちません。 純水の貯水池の充填は、はるかに小さな問題を引き起こしました。 ディスペンサーはコーヒーマシンから0.5メートル離れており、きれいな水用のプラスチック製のリザーバーを手に取るのに1〜2分しかかかりませんでした。 しかし、私は「これに耐えるのに十分な」(c)ことを固く決心し、頭の中に横たわっているArduino Unoスカーフを装備して、タンクを満たし、廃液を排出するプロセスを自動化することにしました。
この自動化のアイデアの収益性の問題を事前に調査した結果、購入したコーヒーマシンと下水道に接続する機能を備えたコーヒーマシンの価格の差は2倍以上であることが判明しました。 2018年の初めに価格でコーヒーメーカーの例を挙げます:
-購入したコーヒーマシン〜60 000ルーブル。
-「外部通信」に接続する機能を補完するためのコスト〜3000ルーブル。
-上下水道に接続できるコーヒーマシン-〜110,000から∞ルーブル。
価格は天地です。 購入したコーヒーメーカーを自動化することは間違いなく理にかなっています。
メインセクション
目的:
-パレットから液体を排出する間隔を1時間に1回から少なくとも1日1回に増やします。
-廃液を下水道に輸送する便利な方法を実装します。
-きれいな水の容器を取り出して、容器を満たすためにディスペンサーの近くに1〜2分間放置することの意味を忘れてください。
問題を解決する方法:
-人型ロボットを作成するか、これらの問題を手動で処理したロボットのような人を雇います。
-コーヒーマシンのユーザーの手作業の頻度を減らす自動システムを作成します。
明らかに、最初の方法は非常に借金であり、興味深いものです。将来のために残しておきます。 余暇には、準備したコーヒーをコーヒーマシンから従業員に配達し、残りの肉体労働を自動化するロボットを作成できます。 秘書との2番目の方法は退屈で平凡なので、彼らは太古の昔からそれをしました。これは私たちの方法ではありません。 3番目の方法を選択します。これは、労働/価格比の観点から最適です。
選択した方法に従って、設定された目標を解決します。
患者は次のようになります。

コーヒーマシンの左側にはきれいな水用の取り外し可能なタンクがあり、下部には〜400 mlの水滴を入れるための引き込み式のドリップトレイがあります 。
問題は組織的に解決され、自動制御システムの要素の助けを借りて解決されます。
1)19リットルのボトルを2本取ります。これらは常にオフィスにあり、1つはきれいな水用、もう1つは廃棄物用です。
2)コーヒーマシンのタンク内の水位が最低まで下がった場合、ポンプを使用してボトルからきれいな水を最大値まで供給します。
3)PVCチューブとパレットを外部タンクに接続し、その色、ボトル自体のレベルを制御して、排水の色で食欲を損なわないように、多くの水配送サービスが提供するカバーを閉じます。
たとえば、次の場合です。

非常に近い上下水道があるが、コーヒーメーカーが上下水道システムに接続する機能を提供しない場合、この記事はあなたにも適しています。 ポンプの代わりに、12ボルトを使用して制御することもできるソレノイドバルブがあります。バルブは、たとえば、浄水器(通常はきれいな水道水が付いています)に接続されています。 そして、排水管について-下水道へのパイプ、排水タンクのレベル制御センサーは、以下のプログラムから削除する必要があります。
自動化ツールを選択する
Arduino Unoを使用して自動化を開始します。 必要なもの:
-コーヒーマシンのタンク内の水位センサー。
-ボトルからタンクに水を供給するためのポンプ。
-下水タンクの水位センサー。
ロジックは単純です:
コーヒーマシンのタンク内のレベルが最小値を下回っている場合->ポンプをオンにします。
コーヒーマシンのタンク内のレベルが最大値を超えている場合->ポンプを停止します。
下水タンクのレベルが最大値を超えている場合-叫ぶ。
ロジックは単純に思えますが、実装時には、すべてがそれほど単純ではないことが判明し、すべての詳細はプログラミングのセクションにあります。
また、電源ユニット220V-> 12Volt、Arduino、およびポンプも必要です。 Arduinoリレーを使用してポンプを制御します(制御電圧が5ボルトで20 mA以下のリレーモジュールが適しています。自分で行うことも、Arduinoからリレーを購入することもできます)。

人間と通信するために、不具合を通知するためにarduinoのパイピッカーを購入し、ウィッシュリストと人間の行動を読むためのボタンを購入します。
この農場全体を折りたたむためのハウジングも必要です。私はarduino unoに3Dモデルを使用し、arduinoハウジング自体にキーキー付きリレーを取り付けました。 すでにやるべきことがたくさんあります。
-コーヒーマシンのタンク内の水位センサー。
-ボトルからタンクに水を供給するためのポンプ。
-下水タンクの水位センサー。
ロジックは単純です:
コーヒーマシンのタンク内のレベルが最小値を下回っている場合->ポンプをオンにします。
コーヒーマシンのタンク内のレベルが最大値を超えている場合->ポンプを停止します。
下水タンクのレベルが最大値を超えている場合-叫ぶ。
ロジックは単純に思えますが、実装時には、すべてがそれほど単純ではないことが判明し、すべての詳細はプログラミングのセクションにあります。
ポンプを選択してください
ポンプ要件:
1)19リットルの通常のオフィスボトルの首、首の直径53mmを通過する必要があります。
2)Arduinoの電源と連携し、感電の危険がないようにするために、12ボルト以下の供給電圧が必要です。
3)コーヒーマシンの周りのスペースを散らかしたり、目に入ったりしないように、ボトルに浸すことが望ましい。
4)水を1.5メートル上げるための圧力を発生できる必要があります。
次のポンプがこれらの基準を満たしました。
-5〜12ボルトのAmperka製AMP-X157水中ポンプ。

-中国からの水中ポンプBI0002156の6〜15ボルト。

最初に、私は最初の選択肢を選びました。それは単にそれが私の都市で売られていたからです。中国人を1ヶ月待つ時間はありませんでした。 しかし、動作中に突き出ているフィッティングのために判明しましたが、首から別のボトルにいません。 それから私は中国のポンプを買いました、それは完全に行きました。
中国製ポンプの特性(重要なパラメーターは太字で強調表示されています):
動作電圧6-15 V
定格電流:1.2A
最大流量:600l / h
サイズ:約 10.8 x 4 cm(高さx幅)
パーフェクト。 取って 内径12の透明なPVCチューブを購入しました。このポンプでは、最も近い金物店にあります。最初のポンプはアンペアで、直径8〜10 cm(内部、外部)の長さ1 mのチューブが排出されたため、2を購入する必要があります単に指示を実行したい携帯電話。
1)19リットルの通常のオフィスボトルの首、首の直径53mmを通過する必要があります。
2)Arduinoの電源と連携し、感電の危険がないようにするために、12ボルト以下の供給電圧が必要です。
3)コーヒーマシンの周りのスペースを散らかしたり、目に入ったりしないように、ボトルに浸すことが望ましい。
4)水を1.5メートル上げるための圧力を発生できる必要があります。
次のポンプがこれらの基準を満たしました。
-5〜12ボルトのAmperka製AMP-X157水中ポンプ。
-中国からの水中ポンプBI0002156の6〜15ボルト。
最初に、私は最初の選択肢を選びました。それは単にそれが私の都市で売られていたからです。中国人を1ヶ月待つ時間はありませんでした。 しかし、動作中に突き出ているフィッティングのために判明しましたが、首から別のボトルにいません。 それから私は中国のポンプを買いました、それは完全に行きました。
中国製ポンプの特性(重要なパラメーターは太字で強調表示されています):
動作電圧6-15 V
定格電流:1.2A
最大流量:600l / h
サイズ:約 10.8 x 4 cm(高さx幅)
パーフェクト。 取って 内径12の透明なPVCチューブを購入しました。このポンプでは、最も近い金物店にあります。最初のポンプはアンペアで、直径8〜10 cm(内部、外部)の長さ1 mのチューブが排出されたため、2を購入する必要があります単に指示を実行したい携帯電話。
レベルセンサーの選択
レベルセンサーの要件:
1)水槽の低レベルと高レベルに関する情報を提供する必要があります。
2)可能であれば、タンクの設計に介入する必要はありません。
3)コンパクトでなければなりません。
4)美的で目立たないこと。
5)5-12ボルトのArduino電源と互換性のある安全な電源を使用する必要があります。
6)市内で利用できるようにする必要があります(私の要件はここにあります)。
7)真水で作業しなければなりません。
市場が提供するもの:
1)Arduino専用のレベルセンサー

項目を満たします:2、3、5、6。
ポイントを満たしていない:1、4。私にとっては、目立ちすぎで美的ではありません。さらに、その長さでレベル全体の高さを測定することはできません(タンクの高さ約22 cm、このセンサー6.2 cm)
2)フロートレベル

項目を満たします:1(2つのセンサー)、3、5、6。
ポイントを満たしていません:2、4。私たちはタンクを掘削する必要があります、それは際立っていますが、私たちはそれを取ります、それはまだ私たちにとって有用です。
また、バーの形で利用可能で、適切ではありません-適切なサイズを選択することは困難です
3)赤外線レベルセンサー(オプトカプラー)

項目を満たします:1(2つのセンサー)、3、4、5、6。
次の点を満たしていません。2.タンクを掘削する必要があります。
4)超音波距離センサーHC-SR04

すべてのアイテムを満たします。 タンクにはふたがあり、このセンサーを取り付けて表面までの距離を測定できます。これにより、水からの音が99%反射するため(「エコーはヤクレンガ湖に沿って歩く」(c)ide)、このセンサーは理想的です:arduinoと互換性があります、安全な電圧、何も掘削する必要はありません、それは(理論上)カバーの下に隠され、バルクストアでは、レベルを完全に下から完全に測定します。
センサー自体は次のように機能します:センサーにはエミッターとレシーバーがあり、エミッターは音波を送信し、エコーが到着するとレシーバーがリッスンします。これは、物理学のすべての既知の式とエコーの戻り時間に従って、反射面までの距離を計算できます 取って
1)水槽の低レベルと高レベルに関する情報を提供する必要があります。
2)可能であれば、タンクの設計に介入する必要はありません。
3)コンパクトでなければなりません。
4)美的で目立たないこと。
5)5-12ボルトのArduino電源と互換性のある安全な電源を使用する必要があります。
6)市内で利用できるようにする必要があります(私の要件はここにあります)。
7)真水で作業しなければなりません。
市場が提供するもの:
1)Arduino専用のレベルセンサー
項目を満たします:2、3、5、6。
ポイントを満たしていない:1、4。私にとっては、目立ちすぎで美的ではありません。さらに、その長さでレベル全体の高さを測定することはできません(タンクの高さ約22 cm、このセンサー6.2 cm)
2)フロートレベル
項目を満たします:1(2つのセンサー)、3、5、6。
ポイントを満たしていません:2、4。私たちはタンクを掘削する必要があります、それは際立っていますが、私たちはそれを取ります、それはまだ私たちにとって有用です。
また、バーの形で利用可能で、適切ではありません-適切なサイズを選択することは困難です
3)赤外線レベルセンサー(オプトカプラー)
項目を満たします:1(2つのセンサー)、3、4、5、6。
次の点を満たしていません。2.タンクを掘削する必要があります。
4)超音波距離センサーHC-SR04
すべてのアイテムを満たします。 タンクにはふたがあり、このセンサーを取り付けて表面までの距離を測定できます。これにより、水からの音が99%反射するため(「エコーはヤクレンガ湖に沿って歩く」(c)ide)、このセンサーは理想的です:arduinoと互換性があります、安全な電圧、何も掘削する必要はありません、それは(理論上)カバーの下に隠され、バルクストアでは、レベルを完全に下から完全に測定します。
センサー自体は次のように機能します:センサーにはエミッターとレシーバーがあり、エミッターは音波を送信し、エコーが到着するとレシーバーがリッスンします。これは、物理学のすべての既知の式とエコーの戻り時間に従って、反射面までの距離を計算できます 取って
また、電源ユニット220V-> 12Volt、Arduino、およびポンプも必要です。 Arduinoリレーを使用してポンプを制御します(制御電圧が5ボルトで20 mA以下のリレーモジュールが適しています。自分で行うことも、Arduinoからリレーを購入することもできます)。
人間と通信するために、不具合を通知するためにarduinoのパイピッカーを購入し、ウィッシュリストと人間の行動を読むためのボタンを購入します。
この農場全体を折りたたむためのハウジングも必要です。私はarduino unoに3Dモデルを使用し、arduinoハウジング自体にキーキー付きリレーを取り付けました。 すでにやるべきことがたくさんあります。
組み立て、はんだ付け、ドリル、接着剤
必要な合計(ある種の「全員が家にいる間」...):
1)19リットルのボトル2本;
2)Arduino Uno;
3)電源12ボルト;
4)水中ポンプBI0002156;
5)超音波距離センサーHC-SR04(ソナーと呼びます);
6)フロートレベルストレート;
7)人と対話するためのボタン。
8)5ボルトリレー;
9)ピエゾブザー;
10)ケース;
11)お母さん、お母さん、お母さん、ジャンパーの山へ。
ツールのすべて:当然の電気テープ、ナイフ、シーラント、ドリル、ドリル、はんだごて。
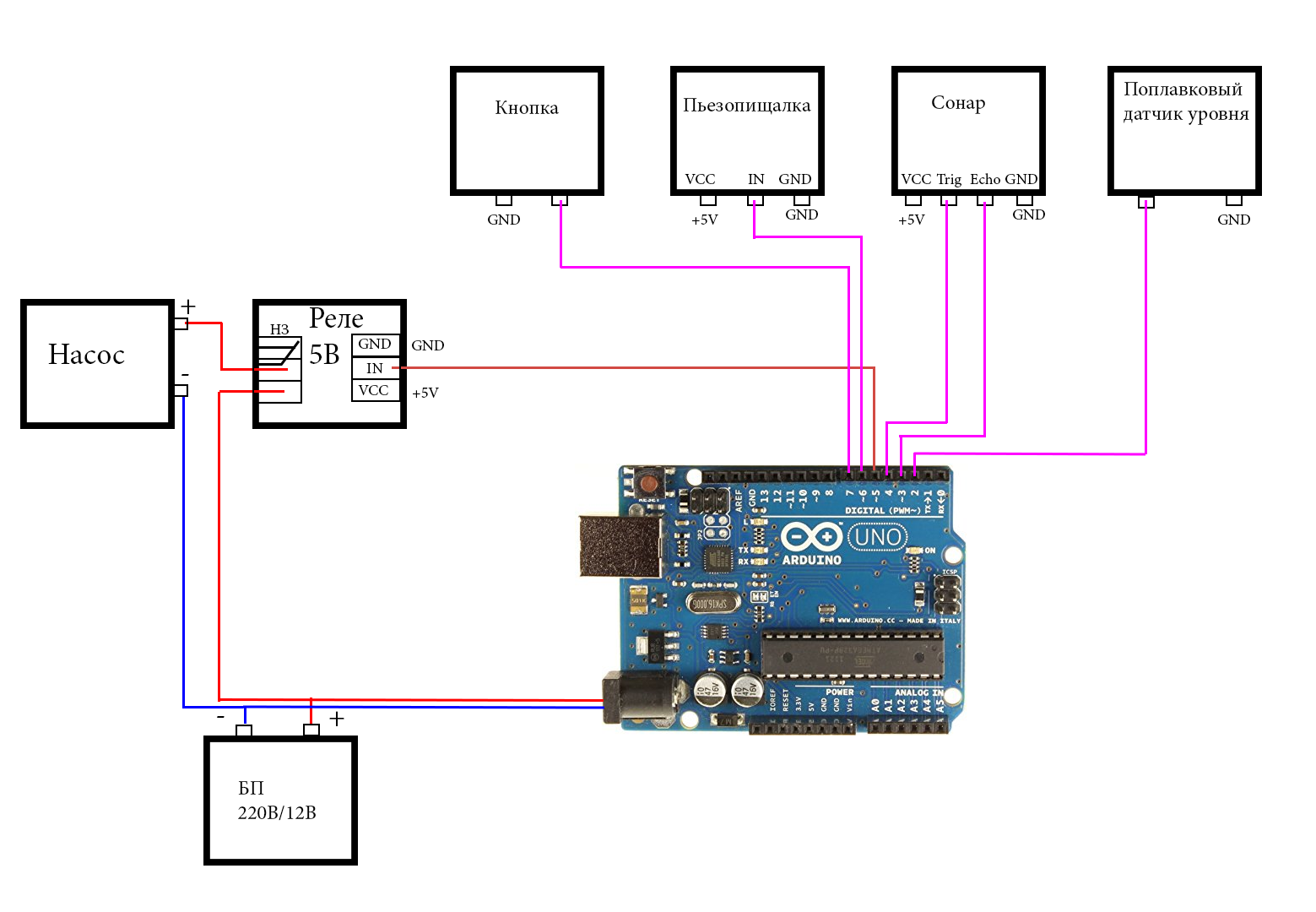
一般的なスキームを以下に示します。

以下の「原則」スキームに従って、構造全体を組み立てます。 各要素からのGNDは、ArduinoのGND出力にプルされます。これは+ 5Vと同じです。 チャンネル番号に従うと、プログラム内のピン番号をやり直さずに済むという利点がありますが、これは低くなります。
私は注意したい:
1.配線をこれらの端子にはんだ付けし、必要なセンサーに5本のワイヤを接続できるWAGA端子から給電することで、GNDおよび5Vコネクタの欠如の問題を解決しました。
2.ソナーはゴムバンドでタンクキャップに取り付けられています。 エミッターが水面に垂直になるようにしてください。
3.ホースがタンクから飛び出さないように、ステーショナリークランプでタンクに取り付けられています。
4. 3Dプリンターで印刷されたフィッティングを介して、パレットから液滴を除去しました。 コーヒーマシンのドレンパンの最下点で、その下に9 mmの穴を開け、そこに挿入して接続を密閉します。 直径8/10 mmのホース継手のモデルは、リンクの下にあります。
1)19リットルのボトル2本;
2)Arduino Uno;
3)電源12ボルト;
4)水中ポンプBI0002156;
5)超音波距離センサーHC-SR04(ソナーと呼びます);
6)フロートレベルストレート;
7)人と対話するためのボタン。
8)5ボルトリレー;
9)ピエゾブザー;
10)ケース;
11)お母さん、お母さん、お母さん、ジャンパーの山へ。
ツールのすべて:当然の電気テープ、ナイフ、シーラント、ドリル、ドリル、はんだごて。
一般的なスキームを以下に示します。
以下の「原則」スキームに従って、構造全体を組み立てます。 各要素からのGNDは、ArduinoのGND出力にプルされます。これは+ 5Vと同じです。 チャンネル番号に従うと、プログラム内のピン番号をやり直さずに済むという利点がありますが、これは低くなります。
私は注意したい:
1.配線をこれらの端子にはんだ付けし、必要なセンサーに5本のワイヤを接続できるWAGA端子から給電することで、GNDおよび5Vコネクタの欠如の問題を解決しました。
2.ソナーはゴムバンドでタンクキャップに取り付けられています。 エミッターが水面に垂直になるようにしてください。
3.ホースがタンクから飛び出さないように、ステーショナリークランプでタンクに取り付けられています。
4. 3Dプリンターで印刷されたフィッティングを介して、パレットから液滴を除去しました。 コーヒーマシンのドレンパンの最下点で、その下に9 mmの穴を開け、そこに挿入して接続を密閉します。 直径8/10 mmのホース継手のモデルは、リンクの下にあります。
Sketchfabのslimercorpによるフィッティング/チョーク
プログラム可能
GeekTimesの記事を送ってくれたChupakabra303に感謝します! タイマーがなければ、信号エッジ検出器はプログラミングに対応できません。 正直なところ、Arduinoを使用するのは非常に困難です。Arduinoは、実際のPLCのような疑似並列タスクによって当初は研ぎ澄まされていませんでした。
0.5秒ごとにレベルを測定します。以前の測定からのエコーは、水タンクのほぼ閉じた空間に収まる必要があります。頻繁に測定する場合、感知できるものは何もありません。
Arduinoは次の方法で通信します。 エラーが発生した場合、彼は10秒間休止してN回鳴きます。Nはエラー番号です。
Nキーキー:
1-排水のためのボトルのオーバーフロー、またはコントローラーとのこのボトル内のセンサーの通信ラインのオープン。
2-超音波レベルセンサー(ソナー)に問題があり、凹んでいるか、ワイヤーのいずれかが外れています。
3-水を注ぐときに水が供給されません。 問題:きれいな水、ポンプ、リレー、電源、ワイヤーのボトルに水がない。
エラー(「理解しました」ジェスチャ)を確認するために、人がボタンを1回押すと、Arduinoが1秒間高音を発し、受け入れられたことを伝えます。私は黙っています。 この時点で、人は問題を解決するための対策を講じ、このモードのArduinoは1分に1回きしみ音を立てて、自分自身を思い出させます。 問題を修正した後、その人はボタンを3秒間2回押します(ジェスチャ「システムをチェック」)。その後、Arduinoが再びきしみ音でエラーを出すか、1つきしみ音を立てて、すべてがうまくいっていると言います。
さらに、次のものが実装されています。
-システムをデバッグするためのCOMポートのデバッグ情報。たとえば、ソナーの位置をデバッグして、目的のレベルを生成します。
-プログラムの実行を停止せずにキーキー音をたてる(それぞれ、ボタンを押す操作で)。
ソースコード:
0.5秒ごとにレベルを測定します。以前の測定からのエコーは、水タンクのほぼ閉じた空間に収まる必要があります。頻繁に測定する場合、感知できるものは何もありません。
Arduinoは次の方法で通信します。 エラーが発生した場合、彼は10秒間休止してN回鳴きます。Nはエラー番号です。
Nキーキー:
1-排水のためのボトルのオーバーフロー、またはコントローラーとのこのボトル内のセンサーの通信ラインのオープン。
2-超音波レベルセンサー(ソナー)に問題があり、凹んでいるか、ワイヤーのいずれかが外れています。
3-水を注ぐときに水が供給されません。 問題:きれいな水、ポンプ、リレー、電源、ワイヤーのボトルに水がない。
エラー(「理解しました」ジェスチャ)を確認するために、人がボタンを1回押すと、Arduinoが1秒間高音を発し、受け入れられたことを伝えます。私は黙っています。 この時点で、人は問題を解決するための対策を講じ、このモードのArduinoは1分に1回きしみ音を立てて、自分自身を思い出させます。 問題を修正した後、その人はボタンを3秒間2回押します(ジェスチャ「システムをチェック」)。その後、Arduinoが再びきしみ音でエラーを出すか、1つきしみ音を立てて、すべてがうまくいっていると言います。
さらに、次のものが実装されています。
-システムをデバッグするためのCOMポートのデバッグ情報。たとえば、ソナーの位置をデバッグして、目的のレベルを生成します。
-プログラムの実行を停止せずにキーキー音をたてる(それぞれ、ボタンを押す操作で)。
ソースコード:
#include <Ultrasonic.h> #include <plcStandardLib_1.h> //============================================================= // R_TRIG R_TRIG1; R_TRIG R_TRIG2; R_TRIG R_TRIG3; R_TRIG R_TRIG4; F_TRIG F_TRIG1; bool TrashFull; // bool igotit; // , bool check_pls; // bool PumpUp; // bool NoFlow; // bool Pressed; // bool beep_pause_superlong; // bool beep_pause_superlong_end; // bool beep_pause_long; // bool beep_pause_long_end; // bool beep_pause_short; // bool beep_pause_short_end; // bool beep_on; // bool beep_duration_end; // bool beep_granted; // bool Pressed_now; // bool UnPressed_now; // bool time_end; // bool reset; // int mode; // int error; // int n_pressed; // 2 int k_beep; // float us_level_raw; // , float us_level_filt; //// , float level; // float level0; // long t0; // long time_to_destroy; // 2 //============================================================= //============================================================= // Ultrasonic ultrasonic(4, 3); // 3 - Echo, 4 - Trig const int LevelTrashPin = 2; // const int RelayPin = 5; // const int BeepPin = 6; // const int ButtonPin = 7; // //============================================================= //============================================================= // // TON TON1(50); // 50, // TON TON2(50); // 50, TOF TOF1(50); // 50, TON TON3(10000); // 10 , TON TON4(1500); // 1.5, TON TON5(1500); // 1.5, TON TON6(10000); // 10 , TON TON7(60000); // 1 , TON TON8(1000); // 1 , DEBUG INFO TON TON9(500); // 0.5 , //============================================================= //============================================================= // , const int f_mode=500; // const int f_error=100; // const int t_nc=5000; // (time_no_control) const int dLevel_cp=3; // (cp - control period) const int button_cp=3000; // const float w_level=0.3; // const float us_level_filt_fault=0.1; // const float HeightTank = 20; // const float HighLevel = 15; // const float LowLevel = 3; // const bool debug_on=true; // Serial //============================================================= void setup() { Serial.begin(9600); // : COM . pinMode(LevelTrashPin, INPUT_PULLUP); pinMode(RelayPin, OUTPUT); pinMode(BeepPin, OUTPUT); pinMode(ButtonPin,INPUT_PULLUP); igotit=false; check_pls=false; NoFlow=false; beep_pause_long=false; beep_pause_short=false; beep_on=false; beep_pause_superlong=false; beep_pause_long=false; beep_pause_short=false; beep_on=false; k_beep=0; t0=millis(); mode=1; tone(BeepPin,f_mode,1000); // , } void loop() { //============================================================= // // - , - , - . // , TrashFull=TON1.Run((digitalRead(LevelTrashPin))); // // , , // - // - // , - // - , , // () // () if (TOF1.Run((digitalRead(ButtonPin)))==false) {Pressed=true;} if (TON2.Run((digitalRead(ButtonPin)))==true) {Pressed=false;} // if (TON9.Run(!TON9.Q)) {us_level_raw=ultrasonic.distanceRead();}; us_level_filt=(1-w_level)*us_level_filt+w_level*us_level_raw; // 0 HeightTank ; level=constrain((HeightTank-us_level_filt), 0, HeightTank) ; //============================================================= //============================================================= // //NoFlow,igotit,check_pls // dLevel_cp . // , , time_end=TON3.Run(PumpUp && !reset); if ((R_TRIG1.Run(PumpUp)==true) | (reset==true)) {level0=level;} // if ((time_end==true) && (level-level0<dLevel_cp)) {NoFlow=true;} else {NoFlow=false;} // if ((time_end==true) && (NoFlow==false)) {reset=true;} else {reset=false;} // // . Pressed_now=R_TRIG2.Run(Pressed); // UnPressed_now=F_TRIG1.Run(Pressed); // if ((mode==2) | (mode==3)) { time_to_destroy=(button_cp-(millis()-t0)); // button_cp 0 if ((Pressed_now==true) && (n_pressed==0) && (time_to_destroy<0)) {t0=millis();} // if ((UnPressed_now==true) && (time_to_destroy>=0)) {n_pressed=n_pressed+1;} // if (time_to_destroy<0) {n_pressed=0;} } // - "i got it"/ . // , . : // 1 3 if ((mode==2) && (n_pressed==1)) {igotit=true; n_pressed==0;} // - "check_pls"/ . // // . : // 2 3 if ((mode==3) && (n_pressed==2)) {check_pls=true; n_pressed==0;} //============================================================= //============================================================= // // , 1 if ((mode==1) && (TrashFull==true) && (millis()>t_nc)) {mode=2; error=1;} // , 2 if ((mode==1) && (us_level_filt<us_level_filt_fault) && (millis()>t_nc)) {mode=2; error=2;} // , 3 if ((mode==1) && (NoFlow==true) && (millis()>t_nc)) {mode=2; error=3;} // - if ((mode==2) && (igotit==true)) {mode=3; error=0; igotit=false;} // if ((mode==3) && (check_pls==true)) {mode=1; check_pls=false;} //============================================================= //============================================================= // // : 1 - , ; 2 - , ; 3 - , ; if (mode==1) { // if (level<=LowLevel) {PumpUp=true;} // - if (level>HighLevel) {PumpUp=false;} // - } if ((mode==2) | (mode==3)) {PumpUp=false;} // //============================================================= //============================================================= // (Digital Output) // if (PumpUp==true) {digitalWrite(RelayPin, LOW);} else {digitalWrite(RelayPin, HIGH);} // delay, // 1- , , if (R_TRIG3.Run(mode==1)==true) {tone(BeepPin,f_mode,1000); beep_on=false; beep_pause_short=false; beep_pause_long=false; beep_pause_superlong=false; k_beep=0;} beep_duration_end=TON4.Run(beep_on); // beep_pause_short_end=TON5.Run(beep_pause_short); // beep_pause_long_end=TON6.Run(beep_pause_long); // beep_pause_superlong_end=TON7.Run(beep_pause_superlong); // // 2-, if (mode==2) { // : beep_granted=!beep_pause_long && !beep_pause_short && (k_beep<error); // if (beep_granted==true) {tone(BeepPin, f_error); beep_on=true;} // , , , - if (beep_duration_end==true) { noTone(BeepPin); k_beep=k_beep+1; //- beep_on=false; // if (error>k_beep) {beep_pause_short=true; beep_pause_long=false;} else {beep_pause_long=true; beep_pause_short=false;} } // , if (beep_pause_short_end==true) {beep_pause_short=false;} // , if (beep_pause_long_end==true) {beep_pause_long=false; k_beep=0;} } // , if (R_TRIG4.Run(mode==3)==true) {tone(BeepPin,f_mode,1000); beep_on=false; beep_pause_short=false; beep_pause_long=false; beep_pause_superlong=true;} // , if (mode==3) { beep_granted=!beep_pause_superlong; // 1 if (beep_granted==true) {tone(BeepPin, f_error); beep_on=true;} // , if (beep_duration_end==true) { noTone(BeepPin); beep_on=false; // beep_pause_superlong=true; } // , if (beep_pause_superlong_end==true) {beep_pause_superlong=false;} } //============================================================= //============================================================= // Debug, if ((debug_on==true) && (TON8.Run(!TON8.Q))) { // Serial.write(27); Serial.print("[2J"); // clear screen Serial.write(27); Serial.print("[H"); // cursor to home // Serial.println("=================Debug info of ArduOsch================="); Serial.println("=================DicreteInputs=========================="); Serial.print("LevelTrashPin="); Serial.print((digitalRead(LevelTrashPin))); Serial.print("| ButtonPin="); Serial.print(digitalRead(ButtonPin)); Serial.print("| US_raw="); Serial.print(us_level_raw); Serial.print("| US_filtered="); Serial.println(us_level_filt); Serial.println("=================DicreteInputs after processing========="); Serial.print("TrashFull="); Serial.print(TrashFull); Serial.print("| ButtonPressed="); Serial.print(Pressed); Serial.print("| Level="); Serial.println(level); Serial.println("=================NoFlow condition======================="); Serial.print("PumpUp="); Serial.print(PumpUp); Serial.print(" Time_end="); Serial.print(time_end); Serial.print(" Reset="); Serial.print(reset); Serial.print("| Level0==="); Serial.print(level0); Serial.print("| TON3_EST="); Serial.print(TON3.PT-TON3.ET); Serial.print("| NoFlow="); Serial.println(NoFlow); Serial.println("=================How mush was man clicked on button?===="); Serial.print("TimeToDestroy="); Serial.print(time_to_destroy); Serial.print("| t0="); Serial.print(t0); Serial.print("| n_pressed="); Serial.println(n_pressed); Serial.println("=================What is the system state?=============="); Serial.print("Mode="); Serial.print(mode); Serial.print("| error="); Serial.println(error); Serial.println("=================Beep code=============="); Serial.print("beep_granted="); Serial.print(beep_granted); Serial.print("| beep_pause_superlong="); Serial.print(beep_pause_superlong); Serial.print("| beep_pause_long="); Serial.print(beep_pause_long); Serial.print("| beep_pause_short="); Serial.println(beep_pause_short); Serial.print("k_beep="); Serial.print(k_beep); Serial.print("| beep_on="); Serial.println(beep_on); } //============================================================= }
ビデオと写真
すべての仕組みのビデオデモ:
ビデオを見たくない人は、ここにいくつかの写真があります:




表紙は、一時的な解決策として(灰色よりも)カザンで使用可能なほぼ唯一の表紙をどのように使用したか(これは一時的なものよりも永続的ですか?)。
結論の代わりに
4日ごとにきれいな水を交換し、金曜日に排水ボトルから液体を注ぎます。5日間、臭いはありませんでした。 誰もが幸せです。 注ぐとボトルを変更するだけ知っています。 Sabantuyはありません、それで十分です。
彼は熱意をもってそれをすべてやりました。それは時には私にとって十分すぎる場合があります、私は本当に彼女がパレットを掃除する必要がある神経のないコーヒーマシンを使用したかったです。 最初のオプションを作成しました。ここでは、レベルごとにポンプを起動/停止し、「ゴミ」が一杯になったときにきしみ音を立てる2、3行があります。 しかし、センサーとアクチュエーターの診断により、正直に考えて決定しました。そのため、集中的な操作中にポンプがより長持ちし、ArduOschと同僚の間で漏れや誤解がなく、その結果、かなり大きなコードになりました。 彼はフィクションのスタイルで記事を書いたので、彼らは見て、朝コーヒーを飲みながら読んで、時々人々がすることを笑うことができました。
みんなに最高!