私の読者は、携帯型の方向探知機と拡張現実がお互いのために作られていることをすでに知っています。 ビデオからの単純な背景は、オペレータの作業を大幅に簡素化できます。 しかし、単純なビデオ背景を持つ振幅方向探知機で電波源を見つけるのが難しい人がいます。 プロセスを簡素化するには、方向探知機と「重い」追加現実をより密接に統合する必要があります。 ARKitやARCoreなどのテクノロジーの出現にもかかわらず、Google Tangoは最も手頃な価格のままです。
拡張現実は美しい写真に引き寄せられるため、内部には技術的な詳細だけでなく、サンクトペテルブルクで最も美しい場所の1つでの方向探知機の作品のビデオクリップもあります。
Google Tangoテクノロジーについては、Habréで何度も説明されていますが、最良の説明はこちらとこちらです。 私たちの場合、多くの技術コンポーネントから、動きと方向を追跡する機能(モーショントラッキング)のみが使用されます。 実際、平らな面や他の面を強調表示する機能は必要ありません。 結局のところ、ソース(この場合はWiFiデバイス)は壁の後ろに配置することができ、同時に完全に方向探知することができます。 タンゴカメラの前に何もなければ、彼女(タンガ-彼女)は動きと向きを追跡できないことは明らかです。 将来的には、周囲の空間の3Dマップを自動的に構築し、作業の結果としてビデオとともに保存することが可能になるかもしれませんが、これまでのところ素晴らしいです。
慣性システムのみに比べて、より優れた精度で、方向探知機の向きに視覚慣性オドメトリ(視覚慣性オドメトリ)の技術を使用することを簡単に正当化できます。 提供される座標および方向データ
Tangoを搭載したデバイスはローカルであり、出発点に結びついています。 ただし、セッション内では、慣性データとは異なり、精度がはるかに高くなります。
被験者には、前述の方向探知機WiFiアクセスポイントが割り当てられました 。 WiFiに基づいて、不正なアクセスポイント(不正AP)およびモノのインターネットデバイスを検索するように設計されています。 BluetoothはMeshなどの新しいテクノロジーで破壊されていますが、World Forge Of All That Isのおかげで、WiFiベースのものの使用は非常に経済的に正当化されています。 これは、Habré: hereおよびhereの記事で確認されています 。
通常のAndroidの方向探知機は次のように機能します。
興味がある人は、 github.com / xnzrのソースとさまざまなビデオを参照してください。 残念ながら、私はビデオの専門家ではありません。また、ビデオの品質はそれほど高くありません。事前にご容赦ください。 ただし、この方向探知機の動作を示すことはビデオでのみ可能です。
鉄から始めましょう。 最初のTangoタブレットはGoogle製で、Google Tangoタブレットと呼ばれていました。 最初、この奇跡をロシアにもたらしたという壮大な物語がありました。 公式には、これは不可能でした。 フィンランドの偽のGmailアカウントを作成し、フィンランドのGoogleストアでフィンランドのメールボックスに注文しました。 そして、このような血の少ないデバイスを手に入れたのは幸運だと考えました。 そして、あなたは制裁を言います。 それから、制裁はまだありませんでした、そして、カーテンはすでにそこにありました。 反対側に。
しかし、これで終わりではありませんでした。 この奇跡のUSBポートは、赤ちゃんの方向探知機さえ引っ張らないことが判明しました。 方向探知機とそのための特別なケーブルに電力を供給するために、外部の取り外し可能な電源バンクを発明しなければなりませんでした。 それはひどく見えました(写真には方向探知機はありません、着陸したVelcro 3M Dual-Lockの4つだけが見えます):

まあ、感情で地獄に。 その後、すべてがうまくいった。 頻繁に起こるように、ドラッグされたソフトウェアで作業します。 そしてまもなく(ああ、栄光、偉大なGoogleと彼の親友Lenovo)Lenovo Phab 2 Proが登場しました! ロシアで利用可能な唯一のものであり、明らかに、Google Tangoを搭載した最新のタブレットです。 ガジェットはしっかりとノックダウンされており、強力で大きく、これは方向探知機にとって重要です。 同時に、ARCoreをサポートするガジェットよりも、平均で10 tr安くなります。 方向探知機はそれの上に美しく座ります:

したがって、Google Tango Tabletは 石co より良い時代まで、手持ち式の方向探知機の博物館。 そして、パワーバンクが彼と共にいることを願っています。
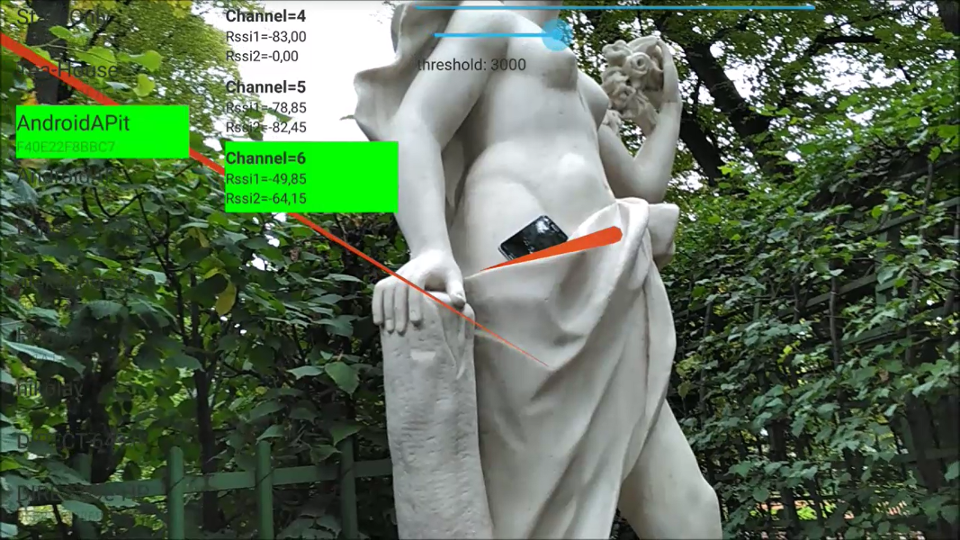
ソフトウェアについて。 いつものように、ソースのgithub.com/xnzr/xnzr-tangoで入手できます。 本質は非常に単純です。2つのアンテナのレベルの差のしきい値(ソースが方向探知機の平面の法線に近いことを意味する)を超えると、赤い矢印が空間に突き刺さります。 これらの矢印は消去されませんが、空間に蓄積されます。これにより、方向探知パラメーターの脳による地形への結合を追跡するのではなく、空間にぶら下がっている矢印によって自分自身を方向付けることができます。
矢印マッピングは、SagittaStorageクラスとOpenGlCylinderクラスによって処理されます。
方向探知機がWiFiソースに向けられていることを報告したら、Tangoデバイスの現在の「ポーズ」(より正確には、ポーズ自体ではなく、遷移マトリックスのみ)を要求します。
TangoSupport.TangoMatrixTransformData depthTarea = TangoSupport.getMatrixTransformAtTime(pointCloud.timestamp, TangoPoseData.COORDINATE_FRAME_START_OF_SERVICE, TangoPoseData.COORDINATE_FRAME_CAMERA_DEPTH, TangoSupport.TANGO_SUPPORT_ENGINE_OPENGL, TangoSupport.TANGO_SUPPORT_ENGINE_TANGO, 0); if (depthTarea.statusCode == TangoPoseData.POSE_VALID) { mRenderer.addPeleng(depthTarea.matrix); }
CopyOnWriteArrayListに追加します(これはArrayListのマルチスレッドバージョンです)。
各フレームでは、保存されたマトリックスをシリンダーに交互に適用し、保存されたすべての「ポーズ」でシリンダーを描画します。
public void draw(GL10 gl) { for (float[] mm : mModelMatrixList) { mSagittaObject.setModelMatrix(mm); mSagittaObject.draw(gl); } }
上で書いたように、そのような方向探知機の仕事を示す唯一の方法はビデオです。 WiFiアクセスポイントとして、共有インターネットアクセス機能がオンになっているスマートフォンがありました。 方向探知機はビーコンフレームパケットを受信し、タブレットにデータを提供します。タブレットは、それらを拡張現実(DAC)の赤い矢印で表示します。 テスト動画へのリンクを以下に示します。 クリップは平日の午後にサマーガーデンで撮影されたので、多くの人がいなかったので、不必要な冒険から私を救い、素晴らしい背景を与えました アンティークヌードの要素 。 あなたも子供のために見ることができます。
ビデオを見るのが苦手な人には、写真(フル解像度で大量のファイル)を見ることをお勧めします: 1、2、3、4、5、6、7、8、および9 。
当然、ソフトウェアで赤い矢印の交点を見つけて、ソースが存在する可能性が最も高いスペースの領域を構築して表示できます。 今日、方向探知機の拡張現実のスタイルを備えた新しいインターフェイスだけでなく、3Dで結果を表示する無線ソースの完全自動検索のベースがあると言えます。 さらに、 ここおよびここで説明する私のフェーズ衛星航法衛星方向探知機の結果の表示をより視覚的にすることも可能です。
Ktatorとしても知られるミハイルルーキンがソフトウェアの部分で私を助けてくれたことに感謝したいです(彼に感謝します!)。 私は鉄に集中しようとします。