
プログラマーが座って、ボタンを使用して別の温度センサーとプログラムを作成しました。 そして突然、このセンサーは将来のモデルで電話の小さなメーカーを望んでいることが判明しました。 したがって、タスクはAndroid OSレベルでI2C / GPIOセンサーをサポートすることでした。センサーは携帯電話自体の不可欠な部分になると約束されているためです。
深い下請けであるため、エンドカスタマーからの迅速かつ定期的な対応の希望はありませんでした。猫を訓練し、手頃な価格のAndroidデバイスに鉄片を入れることにしました。
タスクはそれほど難しくなく、タブレット、その回路を見つけ、何も壊さずに必要な場所にはんだ付けし、最終的なオペレーティングシステムのセンサーの存在に有益なコードを書くことを意味しました。
そこにあるものを順番に見ていきます。
- はじめに
- タブレットなどの実際のデバイスに接続する方法
- オーディオ出力でデバッグUARTを盗み、それが機能しないことを見つける方法
- I2C、GPIO、割り込み、バックグラウンドタスクを使用した簡単なカーネルドライバーの作成方法
- Androidミドルウェアで鉄片を抽象化する方法、または既存のものを使用する方法
- システムサービスを追加する方法と、サービスを有効にして見つけるために何かを追加する場所
- SEAndroid / SELinuxを突破してルールを追加する方法
- チェック方法-簡単なアプリを書く
- すべてをまとめる方法
- 前の段落で何かが間違っていることを理解する方法
はじめに
いつものように、問題はできるだけ早くタスクの一貫性と実現可能性を証明する必要があるように開発されたため、作品のいくつかの部分が形成されましたが、すべてを説明するわけではありませんが、印象の完全性のためにそれらを提供します。
タブレットを探して、選択はいくつかの生産的な理由でネクサス7に落ちました:友人がそれを十分にhitに襲われた(becauseがタッチスクリーンを壊してマウスを使用しなければならなかった)ので、それでもまだネクサスですその上に、Googleサイトの詳細情報とソースコードがありました。 すぐにタブレットを取り上げるのは怖かったので、最初にこねたのはRaspberry Pi3でした。 ほとんどのデバッグは、それで発生しました。 さらに、この物語はRaspberry Pi 3を記念するものではありませんが、ソフトウェアの問題のほとんどがRaspberry Pi 3で解決されたことを覚えておいてください。
タブレットなどの実際のデバイスに接続する方法
回路のないタブレットなどのだまされたデバイスへの接続は
理論的には、タブレットには非常に多くのI2Cバスがあり、どのGPIOよりも桁違いに大きいはずです。適切なものを見つけてはんだ付けし、適切なレベルに引き上げるだけです。 幸いなことに、Nexus 7タブレットには背面カメラがありません。背面カメラは、制御と2つのピン(電源とリセット)にI2Cを使用するだけです。 また、I2Cと2つのGPIOが必要です(1つはオン/オフスリープモード用、もう1つは新しい温度測定を犠牲にして中断するため)。
実際の内部と図の相関関係は、すべてがタブレットの名前ほど単純ではないことを示しました。 つまり、Nexus 7には少なくとも3つのバージョンがあります。
- 2013バージョンは、他のプロセッサとさまざまな小さな詳細があるため、見つかった回路に適合しません
- 2012バージョン.1には背面カメラ用のはんだ付けされたシートがあり、すべてが問題ありません
- 2012バージョン.2にははんだ付けする場所がなく、はんだ付けははるかに困難です。
2012年にはタブレットがあり、既成のコネクタはありませんでした。さらに、キットには壊れたタッチとマウスがありました。 その結果、タンバリンを囲んで踊った後、はんだ付けされたコネクタを備えた別のタンバリンを購入することになりました。 長い間新しいNexus 7はないため、「バザール」を検索しました。これにより、蓋の下を見て、カメラの下にはんだ付けされた場所で必要なものを選択できました。
NDKを使用した簡単なプログラムを使用した簡単な検索により、正しいI2Cバスの番号が見つかりました。 これを行うには、root化されたAndroidとchmodをwitchcraftとともにadb経由でインストールして、すべてのI2Cバスをリリースする必要がありました。 並べ替えの過程で、バスのアドレスを少し遊んでみる必要がありました。アドレスの一部は既に予約されていて、通信しようとしたときにたわごとを受け取ったからです。 その結果、ターゲットバスには他に誰もいないことが判明しました。
リリカル
興味深い詳細は、わだち掘れ後にAndroidのすべてのバージョンが同じように役立つわけではないことです。この場合、最新の公式バージョンはAndroid 5.1.1でした。 インストールとわだち掘れの後、すべてが問題なく見えるようになりましたが、私たちのプログラムは/ devフォルダーにしかアクセスできませんでした。 adbシェルとchmodを使用したアクセス権の強制変更は効果がありませんでした。 熟考した後、Android 4.4.4にロールバックすることにしました。 同じわだち掘れプロセスを繰り返すと、プログラムはすぐに/ devにアクセスできました。 また、adbシェルではバージョン4.4.4の/ devフォルダーはスーパーユーザーに移動しなくても読み取り可能でしたが、Android 5.1.1では読み取り可能ではなかったことにも注意してください。 最も可能性が高いのは、Android 4からAndroid 5以降への移行中にOSセキュリティに関してかなり大きな変更が行われたためです(これはおそらくリンク上の3番目のポイントです)。
GPIOはどうですか?
図の最初のページには、一般的な概要で「背面カメラモジュールOV5650」と呼ばれるカメラがあります。
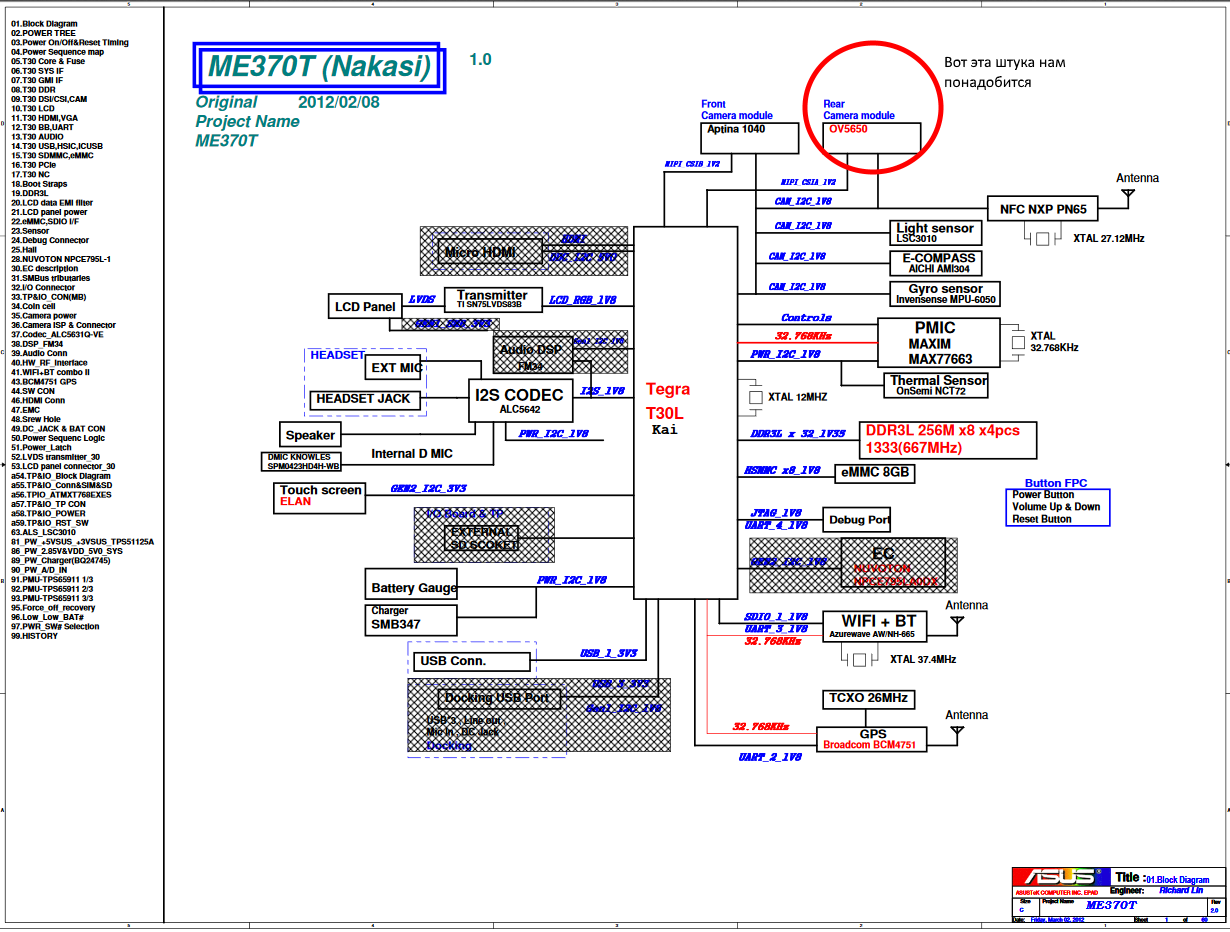
また、tegra T30L(つまりメインSoC)に直接接続されていることも示しています。 近くにI2C_CAM_行があります...見てみましょう...
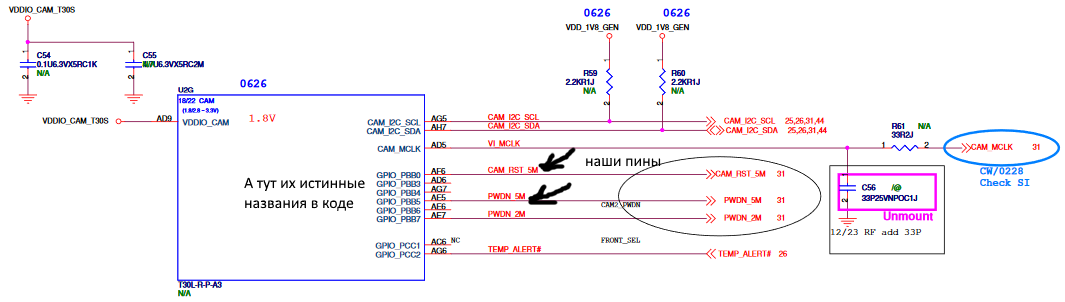
9ページに必要なものがあります。 ほとんどすべてのページは、フロントカメラとリアカメラ専用です。 また、カメラには2つのピンCAM_RST_5MおよびPWDN_5Mがあり、それぞれGPIO_PBB0およびGPIO_PBB5のSoCに接続されるという記述があります。 これが私たちに必要なもののようです。 そこにはんだ付けする方法を見つけるだけなので、検索を続けます...
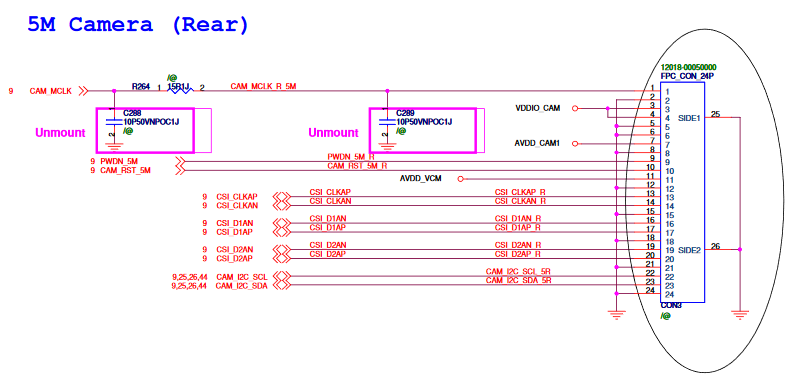
まあ、それだけです。 このページには、目的のピンを含む、カメラの電源が入っているFFCコネクタの説明があります。 オリジナルのタブレットでは、コネクタははんだ付けされていません。 しかし、後で、コネクタを備えた別のタブレットを見つけて、被害を受けないようにします。
さらに、見つかったピンのトレースはプラットフォームコードで既に再開され、ドライバーに関する部分にこれについて書かれています...
オーディオ出力でデバッグUARTを盗み、それが機能しないことを見つける方法
Linux用のドライバーと低レベルのソフトウェアを作成する場合、ドライバーもそこにロードされるため、カーネル/システムブートログを確認することが(非常に)望ましいです。 そして、何かがうまく行かないとすぐに、すべてが停止し、理由は不明です。
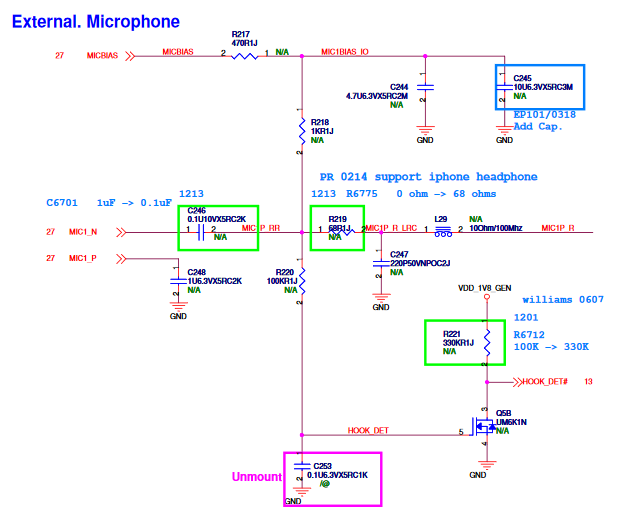
そのため、インターネットを吸って、Nexusデバイスにはオーディオジャックを介したデバッグUART出力があることがわかりました。 そして、それはこのようにソフトウェア設定なしでそれ自体のように動作します:
- MICチャンネルのオーディオジャックには、3V以上のレベルに応答するコンパレータがインストールされています。
- 通常モードでは、MICの電圧は1.8V〜2.9Vです。
- レベルを超えるとすぐに状態がピンに送信され、割り込みにより、デバッグがオーディオジャックを駆動することがカーネルに通知されます。
- その後、左右のチャンネルはそれぞれRXとTXになりますが、1.8Vのままですが、コンバーターが必要です。
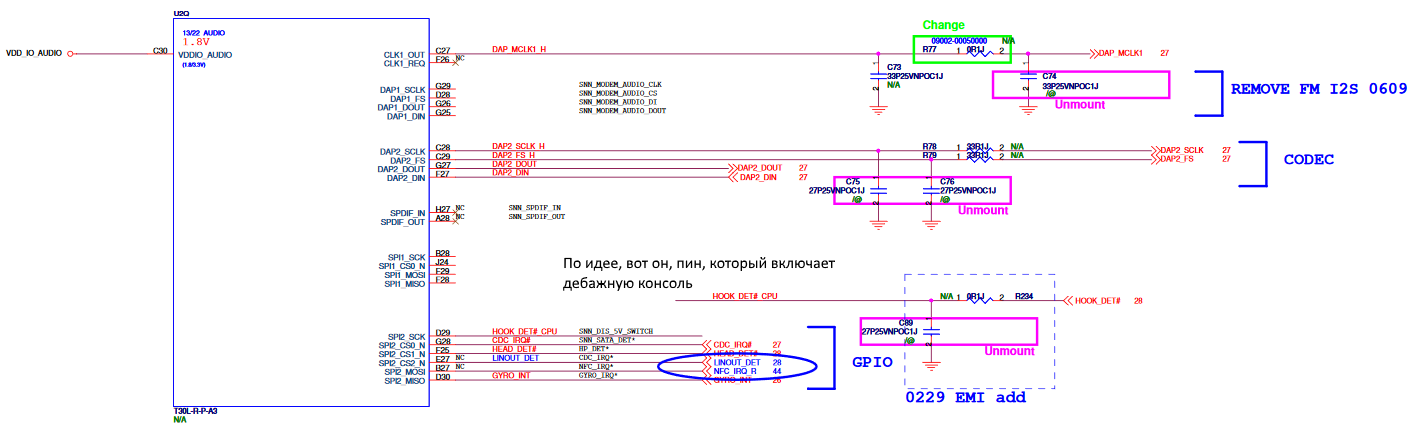
祝うために、アダプターUSB-UART->オーディオが作成されました。 立ち往生し、Ubuntu minicomコンソールでオンにして、タブレットをロードしましたが、何もありませんでした。 一般的に。 つまり、かなり。 さらにフルスケールの検索では、左右のチャネルラインがRX / TXのゼロ電圧レベルに達していないため、何らかの方法でデバッグuartがオンにならないことが示されました。 また、fastbootから多くのコマンドを試しましたが、何も役に立ちませんでした。 このベンチャーの終わりに私たちを安心させた唯一のことは、 別の人が異なるネクサスを試したという情報だけであり、まったく同じUARTタブレット以外は起動しましたが、私たちのものではありませんでした。 でも面白かったです。
さらに基本的な方法は、プロセッサのオン/オフインターフェイスを接続することでしたが、デバイスダイアグラムにはこの可能性が示されていましたが、この方向には行きませんでした。
その結果、私たちの救いは、AndroidストレージにRaspberry Piを予備的に使用することでした。 そこでデバッグポートが機能し、すべてのエラーをキャッチでき、Nexusではカーネルがロードされていない場合に何を変更するかが明確になりました。 統計によると、ほとんどの時間遅延は、はんだ付けされていないGPIOピンと、GPIOでの作業を許可するという点でのtegra3の文書化されていない機能によるものです。
ちなみに、デバッグのために完全なダウンロードログを見るのは面白いです。adbバグレポートを使用して取得できます。
I2C、GPIO、割り込み、バックグラウンドタスクを使用した簡単なカーネルドライバーの作成方法
そのため、I2CおよびGPIOを介してデバイスを操作するカーネルドライバーを作成する必要があり、/ devフォルダーで元の名前で強調表示する必要があったため、Androidミドルウェアはこのファイル/ドライバーにアクセスして何かを読み書きできます。
ドライバーを作成する際の一般的な機能:
- ドライバーは、カーネルにチェーンでロードされます-トップレベルのデバイス(プラットフォーム、バス)は、他のデバイス(それらを操作するための特定のデバイスとアルゴリズム)をロードします。
- カーネルのアセンブリ中にデバイスツリーが無効になっている場合、または古いカーネルバージョンのためにサポートされていない場合、チェーンとブート順序はデバイスツリーまたはCブートコードによって決定されます。 tegra3のケースは2番目です。
- I2C通信が通過するクライアントのi2cの構造を取得するには、プラットフォームブートコードに記載されているデバイスと登録済みドライバーのリストが一致した場合に呼び出されるプローブ関数を作成する必要があります。 i2c_add_driver。
しかし、最初に、ドライバーをダウンロードするための前提条件。 つまり プラットフォーム初期化コードについて。
Nexus 7 2012はTegra3プロセッサ上に構築されています。 カーネルは新しくなく(3.1.h.ch)、デバイスツリーはありません。 これは、すべてのハードウェアがCコードで記述され、/ kernel / tegra / arch / arm / mach-tegra /
board-grouper-pinmux.cファイルは、すべてのSoCピンの鉄の構成を記述し、nVidiaのカーネルの閉じた部分でそれらを初期化するための一般的な関数も含みます(「tegra」という単語で始まるすべての関数は、カーネルの閉じた部分で実装され、バイナリ形式で提供されます) そこで変更する必要があるものを見てみましょう
board-grouper-pinmux.c
// ... // // , , // , /* We are disabling this code for now. */ #define GPIO_INIT_PIN_MODE(_gpio, _is_input, _value) \ { \ .gpio_nr = _gpio, \ .is_input = _is_input, \ .value = _value, \ } static struct gpio_init_pin_info init_gpio_mode_grouper_common[] = { GPIO_INIT_PIN_MODE(TEGRA_GPIO_PDD7, false, 0), GPIO_INIT_PIN_MODE(TEGRA_GPIO_PCC6, false, 0), GPIO_INIT_PIN_MODE(TEGRA_GPIO_PR0, false, 0), // . - :) GPIO_INIT_PIN_MODE(TEGRA_GPIO_PBB0, true, 0), GPIO_INIT_PIN_MODE(TEGRA_GPIO_PBB5, false, 0), }; // static __initdata struct tegra_pingroup_config grouper_pinmux_common[] = { // ... /* , GPIO_PBB0 GPIO_PBB5. O , , . */ /* CAMERA */ DEFAULT_PINMUX(CAM_MCLK, VI_ALT2, PULL_DOWN, NORMAL, INPUT), DEFAULT_PINMUX(GPIO_PCC1, RSVD1, NORMAL, NORMAL, INPUT), // //DEFAULT_PINMUX(GPIO_PBB0, RSVD1, NORMAL, NORMAL, INPUT), // : , nIRQ DEFAULT_PINMUX(GPIO_PBB0, RSVD1, PULL_UP, NORMAL, INPUT), DEFAULT_PINMUX(GPIO_PBB3, VGP3, NORMAL, NORMAL, INPUT), //DEFAULT_PINMUX(GPIO_PBB5, VGP5, NORMAL, NORMAL, INPUT), // // : , DEFAULT_PINMUX(GPIO_PBB5, VGP5, PULL_DOWN, NORMAL, OUTPUT), // ... }; // ... // // , static void __init grouper_gpio_init_configure(void) { int len; int i; struct gpio_init_pin_info *pins_info; u32 project_info = grouper_get_project_id(); if (project_info == GROUPER_PROJECT_NAKASI_3G) { len = ARRAY_SIZE(init_gpio_mode_grouper3g); pins_info = init_gpio_mode_grouper3g; } else { // - 3g, 3G len = ARRAY_SIZE(init_gpio_mode_grouper_common); pins_info = init_gpio_mode_grouper_common; } for (i = 0; i < len; ++i) { tegra_gpio_init_configure(pins_info->gpio_nr, pins_info->is_input, pins_info->value); pins_info++; } } // , pinmux` // nVidia int __init grouper_pinmux_init(void) { struct board_info board_info; u32 project_info = grouper_get_project_id(); tegra_get_board_info(&board_info); BUG_ON(board_info.board_id != BOARD_E1565); grouper_gpio_init_configure(); // tegra_pinmux_config_table(grouper_pinmux_common, ARRAY_SIZE(grouper_pinmux_common)); tegra_drive_pinmux_config_table(grouper_drive_pinmux, ARRAY_SIZE(grouper_drive_pinmux)); if (project_info == GROUPER_PROJECT_NAKASI_3G) { tegra_pinmux_config_table(pinmux_grouper3g, ARRAY_SIZE(pinmux_grouper3g)); } tegra_pinmux_config_table(unused_pins_lowpower, ARRAY_SIZE(unused_pins_lowpower)); grouper_pinmux_audio_init(); return 0; } // ...
board-grouper-sensors.cファイルには、あらゆる種類の異なるデバイスの登録とそれらのデバイスの最も一般的なレベルの機能(電源管理など)が含まれています。 ここで、カーネルの一部として読み込まれるドライバーにデバイスを登録するための構造を追加する必要があります。 このようなもの:
board-grouper-sensors.c
// ... // // GPIO nIRQ // , // , , // , GPIO PWRD static const struct i2c_board_info tricky_sensor_board_info[] = { { I2C_BOARD_INFO("tricky",0x55), .irq = TEGRA_GPIO_TO_IRQ(TEGRA_GPIO_PBB0) }, }; // 2 GPIO (, ). // , // // linux/gpio static int grouper_tricky_init(void) { // tegra_gpio_enable, // int ret = 0; ret = gpio_request(TEGRA_GPIO_PBB5, "tricky_npwd"); if (ret < 0) { pr_err("Tricky: Error: cannot register GPIO_PWR_DOWN\n"); } else { ret = gpio_direction_output(TEGRA_GPIO_PBB5, true); if (ret < 0) { pr_err("Tricky: Error: cannot set GPIO_PWR_DOWN as output\n"); } else { tegra_gpio_enable(TEGRA_GPIO_PBB5); } } ret = gpio_request(TEGRA_GPIO_PBB0, "tricky_nirq"); if (ret < 0) { pr_err("Tricky: Error: cannot register GPIO_NIRQ\n"); return ret; } ret = gpio_direction_input(TEGRA_GPIO_PBB0); if (ret < 0) { gpio_free(TEGRA_GPIO_PBB0); pr_err("Tricky: Error: cannot set GPIO_NIRQ as input\n"); } else { tegra_gpio_enable(TEGRA_GPIO_PBB0); } printk("%s: Tricky OK", __FUNCTION__); return ret; } // ... // , // int __init grouper_sensors_init(void) { int err; grouper_camera_init(); #ifdef CONFIG_VIDEO_OV2710 i2c_register_board_info(2, grouper_i2c2_board_info, ARRAY_SIZE(grouper_i2c2_board_info)); #endif /* Front Camera mi1040 + */ pr_info("mi1040 i2c_register_board_info"); i2c_register_board_info(2, front_sensor_i2c2_board_info, ARRAY_SIZE(front_sensor_i2c2_board_info)); err = grouper_nct1008_init(); if (err) printk("[Error] Thermal: Configure GPIO_PCC2 as an irq fail!"); i2c_register_board_info(4, grouper_i2c4_nct1008_board_info, ARRAY_SIZE(grouper_i2c4_nct1008_board_info)); mpuirq_init(); i2c_register_board_info(2, cardhu_i2c1_board_info_al3010, ARRAY_SIZE(cardhu_i2c1_board_info_al3010)); if (GROUPER_PROJECT_BACH == grouper_get_project_id()) { i2c_register_board_info(2, cap1106_i2c1_board_info, ARRAY_SIZE(cap1106_i2c1_board_info)); } // grouper_tricky_init(); i2c_register_board_info(2/* I2C , */, tricky_sensor_board_info, ARRAY_SIZE(tricky_sensor_board_info)); return 0; } // TBD ( )
コメント付きのドライバー部品コード
#include <linux/init.h> // Macros used to mark up functions eg __init __exit #include <linux/module.h> // Core header for loading LKMs into the kernel #include <linux/device.h> // Header to support the kernel Driver Model #include <linux/kernel.h> // Contains types, macros, functions for the kernel #include <linux/fs.h> // Header for the Linux file system support #include <linux/i2c.h> // main sensor communication protocol #include <linux/gpio.h> // sensor`s wake/sleep and new data interrupts are processed via two pins #include <linux/interrupt.h> // Support GPIO IRQ handler #include <asm/uaccess.h> // copy_to_user and copy_from_user functions #include <asm/io.h> // Access to memset() #include <linux/workqueue.h> // Make IRQ event into deferred handler task #include <linux/mutex.h> // Sync data buffer usage between IRQ-work and outer read requests #include <linux/delay.h> // Access to mdelay // /dev/tricky_temperature #define DEVICE_NAME "tricky_temperature" // #define CLASS_NAME "tricky" // ... ... // MODULE_LICENSE("GPL"); MODULE_AUTHOR("Pavel Akimov"); MODULE_DESCRIPTION("Test Linux driver for tricky sensor"); ///< modinfo MODULE_VERSION("0.1"); // , static int majorNumber; static struct class* trickyClass = NULL; static struct device* trickyDevice = NULL; // ... ... // static u8 sensor_data_buffer[I2C_DATA_SIZE] = { 0 }; // I2C struct i2c_client *tricky_i2c_client = NULL; // static int dev_open(struct inode *, struct file *); static ssize_t dev_read(struct file *, char *, size_t, loff_t *); static ssize_t dev_ioctl(struct file *file, unsigned int ioctl_num, unsigned long ioctl_param); // I2C static int tricky_i2c_probe(struct i2c_client *client, const struct i2c_device_id *id); static int tricky_i2c_remove(struct i2c_client *i2c_client); // static int set_sensor_power(u8 enabled); // I2C static int read_raw_temperatures(void); // static irq_handler_t tricky_data_irq_handler(unsigned int irq, void *dev_id, struct pt_regs *regs); // static void read_data_work_handler(struct work_struct *w); // static struct workqueue_struct *wq = NULL; static DECLARE_DELAYED_WORK(read_data_work, read_data_work_handler); static struct mutex read_data_mutex; // static struct file_operations fops = { .open = dev_open, .read = dev_read, .unlocked_ioctl = dev_ioctl }; // static const struct i2c_device_id tricky_i2c_id[] = { { CLASS_NAME, 0 }, { }, // , }; MODULE_DEVICE_TABLE(i2c, tricky_i2c_id); // , static struct i2c_driver tricky_i2c_driver = { .driver = { .owner = THIS_MODULE, .name = CLASS_NAME, }, .id_table = tricky_i2c_id, .probe = tricky_i2c_probe, .remove = tricky_i2c_remove }; // i2c i2c , static int tricky_i2c_probe(struct i2c_client *client, const struct i2c_device_id *id) { tricky_i2c_client = client; return 0; } // static int tricky_i2c_remove(struct i2c_client *i2c_client) { if (tricky_i2c_client != NULL) { i2c_unregister_device(tricky_i2c_client); tricky_i2c_client = NULL; } return 0; } // static int __init tricky_temperature_init(void) { int err; // Try to dynamically allocate a major number for the device -- more difficult but worth it majorNumber = register_chrdev(0, DEVICE_NAME, &fops); if (majorNumber<0){ pr_err(KERN_ALERT "Tricky failed to register a major number\n"); return majorNumber; } printk(KERN_INFO "Tricky: registered correctly with major number %d\n", majorNumber); // Register the device class trickyClass = class_create(THIS_MODULE, CLASS_NAME); if (IS_ERR(trickyClass)){ // Check for error and clean up if there is pr_err(KERN_ALERT "Failed to register device class\n"); err = PTR_ERR(trickyClass); // Correct way to return an error on a pointer goto err_char_dev; } printk(KERN_INFO "Tricky: device class registered correctly\n"); // Register the device driver trickyDevice = device_create(trickyClass, NULL, MKDEV(majorNumber, 0), NULL, DEVICE_NAME); if (IS_ERR(trickyDevice)){ // Clean up if there is an error pr_err(KERN_ALERT "Failed to create the device\n"); err = PTR_ERR(trickyDevice); goto err_class; } printk(KERN_INFO "Tricky: device class created correctly\n"); // Made it! device was initialized // I2 , // (, board grouper sensors) probe err = i2c_add_driver(&tricky_i2c_driver); if (err < 0) { pr_err("Tricky: Error: %s: driver registration failed, error=%d\n", __func__, err); goto err_dev; } // I2C ... // IRQ callback` // , err = request_irq( i2c_client->irq, (irq_handler_t)tricky_data_irq_handler, IRQF_TRIGGER_FALLING, "tricky_gpio_handler", NULL); // no shared interrupt lines if (err < 0) { pr_err("Tricky: Error: %s: cannot register GPIO_NIRQ irq handler: Error=%d\n", __func__, err); goto err_drv; } // IRQ wq = create_singlethread_workqueue("tricky_work"); mutex_init(&read_data_mutex); printk(KERN_INFO "Tricky: initialization completed\n"); return 0; err_irq: destroy_workqueue(wq); free_irq(i2c_client->irq, NULL); err_drv: i2c_del_driver(&tricky_i2c_driver); err_dev: device_destroy(trickyClass, MKDEV(majorNumber, 0)); // remove the device class_unregister(trickyClass); // unregister the device class err_class: class_destroy(trickyClass); // remove the device class err_char_dev: unregister_chrdev(majorNumber, DEVICE_NAME); // unregister the major number return err; } // static void __exit tricky_temperature_exit(void) { if (delayed_work_pending(&read_data_work) != 0) cancel_delayed_work_sync(&read_data_work); destroy_workqueue(wq); free_irq(i2c_client->irq, NULL); i2c_del_driver(&tricky_i2c_driver); if (tricky_i2c_client != NULL) { i2c_unregister_device(tricky_i2c_client); tricky_i2c_client = NULL; } device_destroy(trickyClass, MKDEV(majorNumber, 0)); class_unregister(trickyClass); class_destroy(trickyClass); unregister_chrdev(majorNumber, DEVICE_NAME); printk(KERN_INFO "Tricky: Goodbye\n"); } static int dev_open( struct inode *node, struct file *filep) { printk(KERN_INFO "Tricky: Open the LKM!\n"); return 0; } static ssize_t dev_read( struct file *filep, char *buffer, size_t len, loff_t *offset) { int ret; // , (HAL) , if (!buffer || len != I2C_DATA_SIZE) { return -EINVAL; } mutex_lock(&read_data_mutex); ret = copy_to_user(buffer, sensor_data_buffer, I2C_DATA_SIZE); mutex_unlock(&read_data_mutex); if (ret != 0) { return -ENOMEM; } return 0; } static ssize_t dev_ioctl( struct file *file, unsigned int ioctl_num, unsigned long ioctl_param) { switch (ioctl_num) { case IOCTL_POWER: ret = set_sensor_power(ioctl_param != CMD_POWER_WAKEUP ? 1 : 0); if (ret < 0) { return ret; } break; case ... // more commands default: pr_err(KERN_INFO "Tricky: invalid command type to apply\n"); return -EINVAL; } return 0; } static int set_sensor_power(u8 enabled) { gpio_set_value(GPIO_PWR_DOWN, enabled != 0); return 0; } // I2C : (2 ) // static int read_raw_temperatures(void) { int ret; struct i2c_msg write_message; struct i2c_msg read_message; write_message.addr = I2C_SLAVE_ADDRESS; write_message.flags = 0; // plain write write_message.buf = (char*)i2c_read_temperatures_address; write_message.len = sizeof(i2c_read_temperatures_address); memset(sensor_data_buffer, 0, sizeof(sensor_data_buffer)); read_message.addr = I2C_SLAVE_ADDRESS; read_message.flags = I2C_M_RD; // plain read read_message.buf = (char*)sensor_data_buffer; read_message.len = sizeof(sensor_data_buffer); // read out data ret = i2c_transfer(tricky_i2c_client->adapter, &write_message, 1); if (ret < 0) { pr_err(KERN_INFO "Tricky: Cannot write data address. Error=%d\n", ret); return ret; } ret = i2c_transfer(tricky_i2c_client->adapter, &read_message, 1); if (ret < 0) { pr_err(KERN_INFO "Tricky: Cannot read data from the sensor. Error=%d\n", ret); return ret; } return 0; } // - // , I2C , // I2C // , , , // static irq_handler_t tricky_data_irq_handler(unsigned int irq, void *dev_id, struct pt_regs *regs) { // , if (delayed_work_pending(&read_data_work) == 0) queue_delayed_work(wq, &read_data_work, msecs_to_jiffies(1)); return (irq_handler_t)IRQ_HANDLED; } // , // // ( , ) static void read_data_work_handler(struct work_struct *w) { int ret; mutex_lock(&read_data_mutex); ret = read_raw_temperatures(); mutex_unlock(&read_data_mutex); if (ret < 0) { printk(KERN_INFO "Tricky: read_data_work_handler. Ret = %d\n", ret); } } // , module_init(tricky_temperature_init); module_exit(tricky_temperature_exit);
個別に、アセンブリのファイルであるKConfigとMakefileに言及する必要があります。
KConfigでは、Makefileで作成されたTRICKY_SENSOR(CONFIG_プレフィックスなし)という名前で、アセンブリ中に考慮に入れる段落をここに追加します。 また、make menuconfigを使用すると、ドライバーが表示されます。
Kconfig
menuconfig THERMAL tristate "Generic Thermal sysfs driver" help Generic Thermal Sysfs driver offers a generic mechanism for thermal management. Usually it's made up of one or more thermal zone and cooling device. Each thermal zone contains its own temperature, trip points, cooling devices. All platforms with ACPI thermal support can use this driver. If you want this support, you should say Y or M here. config THERMAL_HWMON bool depends on THERMAL depends on HWMON=y || HWMON=THERMAL default y config TRICKY_SENSOR default y bool prompt "Tricky temperature sensor support"
メイクファイル
obj-$(CONFIG_THERMAL) += thermal_sys.o obj-$(CONFIG_TRICKY_SENSOR) += tricky_temperature.o
その結果、カーネル用に次のファイルを取得します。
kernel/tegra/arch/arm/mach-tegra/board-grouper-pinmux.c kernel/tegra/arch/arm/mach-tegra/board-grouper-sensors.c kernel/tegra/drivers/thermal/tricky_sensor.c kernel/tegra/drivers/thermal/KConfig kernel/tegra/drivers/thermal/Makefile
Androidミドルウェアで鉄片を抽象化する方法、または既存のものを使用する方法
次のレベルに進みましょう。 ドライバーは作成されており、Androidのユーザー空間部分に移動しています。ここで、ドライバーに何らかの方法でバインドする必要があります。
Androidで同じ種類の周辺機器の多くの実装を使用するために、ハードウェアアブストラクションのさまざまなインターフェイスを含むミドルウェアレイヤー(C / C ++で記述)があります(ハードウェアアブストラクションレベル-HAL)。 そして、あらゆる種類の温度磁気などのために センサーがある場所があります。 しかし、このHALの制限は、そのAPIが読み取り専用であることです。これは、これらのデバイスに同時にアクセスできる多くのユーザープログラムを考えると妥当です。 そして、一方の設定を変更すると、もう一方の設定になります。 このすべては、ここで非常によく説明されています 。
また、特にセンサーを操作する読み取り専用モードに関しては、上記のリンクからの引用です。
サンプリング頻度と最大レポート遅延以外に、アプリケーションはセンサーパラメーターを構成できません。 たとえば、「高精度」モードと「低電力」モードの両方で機能する物理センサーを想像してください。 それ以外の場合はアプリケーションが高精度モードを要求し、別のモードは低電力モードを要求する可能性があるため、Androidデバイスで使用できるのはこれら2つのモードのうち1つだけです。 フレームワークが両方のアプリケーションを満たす方法はありません。 フレームワークは常にすべてのクライアントを満足させる必要があるため、これはオプションではありません。
アプリケーションからセンサーまたはそのドライバーにデータを送信するメカニズムはありません。 これにより、1つのアプリケーションがセンサーの動作を変更できなくなり、他のアプリケーションが破損することがなくなります。
しかし、私たちは本当にデバイスを制御します(たとえば、電力モードと測定モードを切り替えます)。また、センサーは公式に文書化されておらず、プログラムのみが動作するため、独自のHALを作成します。 ここでは基本的なことはアクセス可能な英語で書かれているので、後でどのようなデータ構造とその理由が明らかになります。
独自のハードウェアを作成します。 これを行うには、IDを見つけて、モジュールの説明、および派生関数を含むhw_device_tを含む構造体を作成する必要があります。 Googleは、このレベルでの実装とインターフェースの外観を正確に指定していないため、兄貴を振り返ることなく、良いものをまき始めることができます。
sensor_tricky_temperature.h
#ifndef ANDROID_TRICKY_INTERFACE_H #define ANDROID_TRICKY_INTERFACE_H #include <stdint.h> #include <sys/cdefs.h> #include <sys/types.h> #include <hardware/hardware.h> __BEGIN_DECLS #define TRICKY_HARDWARE_MODULE_ID "tricky" struct tricky_device_t { struct hw_device_t common; int (*read_sample)(unsigned short *psynchro, short *pobj_temp, short *pntc1_temp, short *pntc2_temp, short *pntc3_temp); int (*activate)(unsigned char enabled); int (*set_mode)(unsigned char is_continuous); }; __END_DECLS #endif // ANDROID_TRICKY_INTERFACE_H
sensor_tricky_temperature.c
#include <errno.h> #include <cutils/log.h> #include <cutils/sockets.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <linux/i2c.h> #include <hardware/sensor_tricky_temperature.h> #define LOG_TAG "TRICKY" #define DEVICE_NAME "/dev/tricky_temperature" #define TRICKY_MODE_0 0 #define TRICKY_MODE_1 1 int fd = 0; int read_sample(unsigned short *psynchro, short *pobj_temp, short *pntc1_temp, short *pntc2_temp, short *pntc3_temp) { int ret = 0; unsigned char buffer[10]; ALOGD("HAL -- read_sample() called"); ret = read(fd, (char*)buffer, sizeof(buffer)); if (ret < 0) { ALOGE("HAL -- cannot read raw temperature data"); return -1; } if (psynchro) *psynchro = (unsigned short)(buffer[3] << 8 | buffer[2]); if (pobj_temp) *pobj_temp = (short)(buffer[1] << 8 | buffer[0]); if (pntc1_temp) *pntc1_temp = (short)(buffer[5] << 8 | buffer[4]); if (pntc2_temp) *pntc2_temp = (short)(buffer[7] << 8 | buffer[6]); if (pntc3_temp) *pntc3_temp = (short)(buffer[9] << 8 | buffer[8]); ALOGD("HAL - sample read OK"); return 0; } int activate(unsigned char enabled) { int ret = 0; ALOGD("HAL - activate(%d) called", enabled); ret = ioctl(fd, 0, enabled ? TRICKY_MODE_0 : TRICKY_MODE_1); if (ret < 0) { ALOGE("HAL - cannot write activation state"); return -1; } ALOGD("HAL - activation state written OK"); return 0; } int set_mode(unsigned char is_continuous) { int ret; ALOGD("HAL -- set_mode(%d) called", is_continuous); ret = ioctl(fd, 1, is_continuous ? TRICKY_MODE_0 : TRICKY_MODE_1); if (ret < 0) { ALOGE("HAL - cannot write mode state"); return -1; } ALOGD("HAL - mode state written OK"); return 0; } static int open_tricky(const struct hw_module_t* module, char const* name, struct hw_device_t** device) { int ret = 0; struct tricky_device_t *dev = malloc(sizeof(struct tricky_device_t)); if (dev == NULL) { ALOGE("HAL - cannot allocate memory for the device"); return -ENOMEM; } else { memset(dev, 0, sizeof(*dev)); } ALOGD("HAL - openHAL() called"); dev->common.tag = HARDWARE_DEVICE_TAG; dev->common.version = 0; dev->common.module = (struct hw_module_t*)module; dev->read_sample = read_sample; dev->activate = activate; dev->set_mode = set_mode; *device = (struct hw_device_t*) dev; fd = open(DEVICE_NAME, O_RDWR); if (fd <= 0) { ALOGE("HAL - cannot open device driver"); return -1; } ALOGD("HAL - has been initialized"); return 0; } static struct hw_module_methods_t tricky_module_methods = { .open = open_tricky }; struct hw_module_t HAL_MODULE_INFO_SYM = { .tag = HARDWARE_MODULE_TAG, .version_major = 1, .version_minor = 0, .id = TRICKY_HARDWARE_MODULE_ID, .name = "Tricky HAL Module", .author = "Pavel Akimov", .methods = &tricky_module_methods, };
モジュールをビルドするには、 Android.mkファイルが必要です。
Android.mk
# LOCAL_PATH := $(call my-dir) # .mk , # # , LOCAL_PATH include $(CLEAR_VARS) LOCAL_PRELINK_MODULE := false # , LOCAL_MODULE_PATH := $(TARGET_OUT_SHARED_LIBRARIES)/hw # LOCAL_SHARED_LIBRARIES := liblog libcutils libhardware # , LOCAL_SRC_FILES := sensor_tricky_temperature.c # LOCAL_MODULE := techartmsjdts.default LOCAL_MODULE_TAGS := debug include $(BUILD_SHARED_LIBRARY)
また、コンパイルされたライブラリをlibhardwareに含めるための別のAndroid.mkファイル。 モジュールのIDを名前で追加します。
Android.mk
hardware_modules := gralloc hwcomposer audio nfc nfc-nci local_time \ power usbaudio audio_remote_submix camera consumerir tricky include $(call all-named-subdir-makefiles,$(hardware_modules))
HALの出力には、次のファイルがあります
hardware/libhardware/include/hardware/sensor_tricky_temperature.h hardware/libhardware/modules/Android.mk hardware/libhardware/modules/tricky/sensor_tricky_temperature.c hardware/libhardware/modules/tricky/Android.mk
システムサービスを追加する方法と、サービスを有効にして見つけるために何かを追加する場所
さらに、誰かがHALに電話する必要があります。 OCの他の部分では、そのようなことは、Javaで記述されたシステムサービスとそのマネージャーを使用して行われます。 行の外に出ないようにするには、別のものを書きます。 当社のサービスは次のファイルに参加します。
frameworks\base\core\java\android\app\ContextImpl.java frameworks\base\core\java\android\content\Context.java frameworks\base\core\java\android\hardware\temperature\ITrickyService.aidl frameworks\base\core\java\android\hardware\temperature\TrickyTemperatureData.aidl frameworks\base\core\java\android\hardware\temperature\TrickyTemperatureData.java frameworks\base\core\java\android\hardware\temperature\TrickyManager.java frameworks\base\services\java\com\android\server\temperature\TrickyService.java frameworks\base\services\java\com\android\server\SystemServer.java frameworks\base\services\jni\Android.mk frameworks\base\services\jni\com_android_server_temperature_TrickyService.cpp frameworks\base\services\jni\onload.cpp frameworks\base\Android.mk
ソースからわかるように、ネイティブレベルはまだわからないため、JNIを介してHALモジュールに接続する必要があります。 同時に、参照タイプを書き留めます。これはAIDLを介して決定し、C ++からJavaに投げる必要があります。
サービスのネイティブ部分のコード
// LOG_TAG #define LOG_TAG "TRICKY" #include "jni.h" #include "JNIHelp.h" #include "android_runtime/AndroidRuntime.h" #include <utils/misc.h> #include <utils/Log.h> #include <hardware/hardware.h> #include <hardware/sensor_tricky_temperature.h> #include <stdio.h> // , , // , Android namespace android { static jlong init_native(JNIEnv *env, jobject clazz) { int err; hw_module_t* module; tricky_device_t* dev = NULL; // HAL // , hw // , // HAL ".default" - ( // - HAL, ) err = hw_get_module(TRICKY_HARDWARE_MODULE_ID, (hw_module_t const**)&module); if (err == 0) { err = module->methods->open(module, "", ((hw_device_t**) &dev)); if (err != 0) { ALOGE("init_native: cannot open device module: %d", err); return -1; } } else { ALOGE("init_native: cannot get device module: %d", err); return 0; } ALOGD("init_native: start ok"); // Java return (jlong)dev; } // static void finalize_native(JNIEnv *env, jobject clazz, jlong ptr) { tricky_device_t* dev = (tricky_device_t*)ptr; if (dev == NULL) { ALOGE("finalize_native: invalid device pointer"); return; } free(dev); ALOGD("finalize_native: finalized ok"); } // HAL // C++ TrickyTemperatureData static jobject read_sample_native(JNIEnv *env, jobject clazz, jlong ptr) { tricky_device_t* dev = (tricky_device_t*)ptr; int ret = 0; unsigned short synchro = 0; short obj_temp = 0; short ntc1_temp = 0; short ntc2_temp = 0; short ntc3_temp = 0; if (dev == NULL) { ALOGE("read_sample_native: invalid device pointer"); return (jobject)NULL; } ret = dev->read_sample(&synchro, &obj_temp, &ntc1_temp, &ntc2_temp, &ntc3_temp); if (ret < 0) { ALOGE("read_sample_native: Cannot read TrickyTemperatureData"); return (jobject)NULL; } // , // android.hardware.temperature.TrickyTemperatureData jclass c = env->FindClass("android/hardware/temperature/TrickyTemperatureData"); if (c == 0) { ALOGE("read_sample_native: Find Class TrickyTemperatureData Failed"); return (jobject)NULL; } // ( ) jmethodID cnstrctr = env->GetMethodID(c, "<init>", "()V"); if (cnstrctr == 0) { ALOGE("read_sample_native: Find constructor TrickyTemperatureData Failed"); return (jobject)NULL; } // ID . , , , getter` setter` jfieldID synchroField = env->GetFieldID(c, "synchro", "I"); jfieldID objTempField = env->GetFieldID(c, "objectTemperature", "I"); jfieldID ntc1TempField = env->GetFieldID(c, "ntc1Temperature", "I"); jfieldID ntc2TempField = env->GetFieldID(c, "ntc2Temperature", "I"); jfieldID ntc3TempField = env->GetFieldID(c, "ntc3Temperature", "I"); if (synchroField == 0 || objTempField == 0 || ntc1TempField == 0 || ntc2TempField == 0 || ntc3TempField == 0) { ALOGE("read_sample_native: cannot get fields of resulting object"); return (jobject)NULL; } // jobject jdtsData = env->NewObject(c, cnstrctr); env->SetIntField(jdtsData, synchroField, (jint)synchro); env->SetIntField(jdtsData, objTempField, (jint)obj_temp); env->SetIntField(jdtsData, ntc1TempField, (jint)ntc1_temp); env->SetIntField(jdtsData, ntc2TempField, (jint)ntc2_temp); env->SetIntField(jdtsData, ntc3TempField, (jint)ntc3_temp); ALOGD("read_sample_native: read ok"); return jdtsData; } // // JNI static JNINativeMethod method_table[] = { { "init_native", "()J", (void*)init_native }, { "finalize_native", "(J)V", (void*)finalize_native }, { "read_sample_native", "(J)Landroid/hardware/temperature/TrickyTemperatureData;", (void*)read_sample_native }, { "activate_native", "(JZ)Z", (void*)activate_native }, { "set_mode_native", "(JZ)Z", (void*)set_mode_native}, }; // onload.cpp, // system server int register_android_server_JdtsService(JNIEnv *env) { ALOGD("register_android_server_JdtsService"); return jniRegisterNativeMethods( env, "com/android/server/temperature/JdtsService", method_table, NELEM(method_table)); }; };
さらにonload.cppは、それを必要とするサービスのすべてのJNI部分をロードします。私たちのものを含む。
onload.cpp
// ... #include "JNIHelp.h" #include "jni.h" #include "utils/Log.h" #include "utils/misc.h" namespace android { // ... int register_android_server_JdtsService(JNIEnv* env); }; using namespace android; extern "C" jint JNI_OnLoad(JavaVM* vm, void* /* reserved */) { JNIEnv* env = NULL; jint result = -1; if (vm->GetEnv((void**) &env, JNI_VERSION_1_4) != JNI_OK) { ALOGE("GetEnv failed!"); return result; } ALOG_ASSERT(env, "Could not retrieve the env!"); // ... register_android_server_JdtsService(env); return JNI_VERSION_1_4; }
従来のAndroid.mkには、すべてのパーツを組み立てるための情報が含まれており、JNIのピースもそこにあります。
参照タイプはAIDLを使用して作成する必要があります。この言語はAndroidだけでなく、Androidのプロセス間データ転送の手段であるためです。また、それを転送するには、以下のリストに示すように、パーセル可能である必要があります。
TrickyTemperatureData.aidl
package android.hardware.temperature; parcelable TrickyTemperatureData;
TrickyTemperatureData.java
package android.hardware.temperature; import android.os.Parcel; import android.os.Parcelable; /** {@hide} */ public final class TrickyTemperatureData implements Parcelable { public int synchro; public int objectTemperature; public int ntc1Temperature; public int ntc2Temperature; public int ntc3Temperature; public static final Parcelable.Creator<TrickyTemperatureData> CREATOR = new Parcelable.Creator<TrickyTemperatureData>() { public TrickyTemperatureData createFromParcel(Parcel in) { return new TrickyTemperatureData(in); } public TrickyTemperatureData[] newArray(int size) { return new TrickyTemperatureData[size]; } }; public TrickyTemperatureData() { } private TrickyTemperatureData(Parcel in) { readFromParcel(in); } @Override public void writeToParcel(Parcel out, int flags) { out.writeInt(synchro); out.writeInt(objectTemperature); out.writeInt(ntc1Temperature); out.writeInt(ntc2Temperature); out.writeInt(ntc3Temperature); } public void readFromParcel(Parcel in) { synchro = in.readInt(); objectTemperature = in.readInt(); ntc1Temperature = in.readInt(); ntc2Temperature = in.readInt(); ntc3Temperature = in.readInt(); } @Override public int describeContents() { return 0; } }
サービス自体とそのマネージャーは非常にシンプルで気取らないので、ここでは説明しません。すべてを監視または突くリンクに配置します。
ここで、サービスの名前を使用して定数を追加する必要があります。そのサービスを使用すると、context.getSytemServiceを介して検索できます。コメントにはhideを含める必要があることに注意してください。そうしないと、アセンブリは機能せず、そのような名前はAPIに正式に登録するか、ハッキングする必要があるというメッセージが残ります。
// frameworks\base\core\java\android\content\Context.java /** * @hide */ public static final String TRICKY_SERVICE = "android.service.tricky.ITrickyService";
サービスを機能させるには、ここでSystemServerを介してServiceManagerに含める必要があります。
// frameworks\base\services\java\com\android\server\SystemServer.java // initAndLoop ... try { Slog.e(TAG, "Tricky Service"); trickyService = new TrickyService(context); ServiceManager.addService(Context.TRICKY_SERVICE, trickyService); } catch (Throwable e) { Slog.e(TAG, "Failure starting TrickyService", e); }
サービスをアプリケーション側で使用可能にするには、そのマネージャーをコンテキストに追加する必要があります(静的ローディングブロック内)。
//frameworks\base\core\java\android\app\ContextImpl.java registerService(TRICKY_SERVICE, new ServiceFetcher() { public Object createService(ContextImpl ctx) { IBinder iBinder = ServiceManager.getService(Context.TRICKY_SERVICE); return new TrickyManager(ITrickyService.Stub.asInterface(iBinder)); }});
RegisterService自体は、Android 4.4.4では次のようになります。
private static int sNextPerContextServiceCacheIndex = 0; // .. fetcher map private static void registerService(String serviceName, ServiceFetcher fetcher) { if (!(fetcher instanceof StaticServiceFetcher)) { fetcher.mContextCacheIndex = sNextPerContextServiceCacheIndex++; } SYSTEM_SERVICE_MAP.put(serviceName, fetcher); } // , getSystemService // ... @Override public Object getSystemService(String name) { ServiceFetcher fetcher = SYSTEM_SERVICE_MAP.get(name); return fetcher == null ? null : fetcher.getService(this); }
独自のルールを追加してSEAndroid / SELinuxを突破する方法
さて、すべてのコードが記述されているようですが、ドライバーは完全にルートユーザーによって所有されているため、サービスは開始されず、ログに実行する権限がないというメッセージが表示され、そして、何かの記録を書くと、結果として、利益はありません。必要な権利と規則は、sepolicyパートで規定する必要があります。
initスクリプトのプラットフォーム固有の部分。システム全体のほぼ初期の起動を処理します。
#(device/asus/grouper/init.grouper.rc) # ... on post-fs-data # ... # tricky temperature sensor # / system # root` chmod 0660 /sys/class/tricky/tricky_temperature/dev chown system system /sys/class/tricky/tricky_temperature/dev
また、デバイスファイル自体の権利と許可をueventdに登録します。
# device/asus/grouper/ueventd.grouper.rc /dev/tricky_temperature 0660 system system
そして...システムサービス(コードで既に追加している場所)でサービスを読み込むことができるように、あらゆる種類のSELinuxルールを作成する必要があります。また、サービスであるキャラクターデバイス(ドライバー)の読み取りと書き込みを許可するルールも作成する必要があります。主にBrilloの例に依存していました。私はそれに夢中になってすべてを理解したかどうかはわかりませんが、順番に試してみましょう:
1つのフットクロスにルールがあるすべてのファイル
##################################### # , # . # , . # (te_macros) # tricky_service_domain(domain) # Allow a base set of permissions common across Android daemons. define(`tricky_service_domain', ` init_daemon_domain($1) # Allow using binder and performing IPC to system services. binder_use($1) binder_service($1) # Allow access to files in /proc. # Fixes denials like: # avc: denied { read } for pid=1267 comm="peripheralman" name="misc" dev="proc" # ino=4026531967 scontext=u:r:peripheralman:s0 # tcontext=u:object_r:proc:s0 tclass=file permissive=0 allow $1 proc:file r_file_perms; allow $1 tricky_service:service_manager find; # Cut down on spam. dontaudit $1 kernel:system module_request; ') ##################################### # , , # # (tricky_service.te) type tricky_service, domain; type tricky_service_exec, exec_type, file_type; tricky_service_domain(tricky_service) ##################################### # , system manager # (service.te) type tricky_service, service_manager_type; # , # "tricky_service" . # SELinux https://source.android.com/security/selinux/ ##################################### # (service_contexts) android.service.jdtstemperature.IJdstsService u:object_r:tricky_service:s0 ##################################### # . # . # (device.te) type tricky_device, dev_type, mlstrustedobject; ##################################### # # (file_contexts) /dev/tricky_temperature u:object_r:tricky_device:s0 ##################################### # ( , , # "bootanim" # ) #(bootanim.te) allow bootanim tricky_device:chr_file rw_file_perms; ##################################### # , , SystemServer system apps # (system_server.te) allow system_server tricky_device:chr_file rw_file_perms; ##################################### # (system_app.te) allow system_app tricky_device:chr_file rw_file_perms;
ここで、サービス用の新しいドメインを作成し、デバイスを特定し、サービスにドライバーへの読み取りおよび書き込み権限があることを示しました。もちろん、それをすべて書いたのは初めてではありませんでした。このすべてのロードの後、システムは最終的にブロックされたサービスに関するメッセージを取り除き、adbシェルでドライバーがシステムのユーザー名に記録され、世界中に公開されていることが明らかになりました。
チェック方法-簡単なアプリを書く
すべてが機能することを何らかの形で検証する必要があります。もちろん、adbシェルを介してlogcatをじっと見つめることもできますが、何らかの理由で誰もがこの結果に満足しているわけではないため、カスタムOCに組み込みアプリケーションも追加します。もちろん、ビルトイン。このタブレットを除き、誰がそれを必要とします。パッケージ/アプリ/ TrickyDemo、およびビルド/ターゲット/製品/core.mkに入れるソースでは、事前定義されたもののリストでそれを示します。
メインコード内部アプリケーション
package com.android.trickydemo; import android.app.Activity; import android.os.Bundle; import android.util.Log; import android.widget.CompoundButton; import android.widget.ImageView; import android.widget.Switch; import android.widget.TextView; import android.hardware.temperature.*; public class MainActivity extends Activity { private final String TAG = "TrickyDemo"; private final int POLLING_PERIOD_MS = 200; private TrickyManager mServiceManager = null; private TrickyTemperatureData mSensorData = null; private GaugeView mGaugeObj; private GaugeView mGaugeNtc1; private GaugeView mGaugeNtc2; private GaugeView mGaugeNtc3; private TextView mTextSynchro; private ImageView mIrqImage; private TextView mTextObj; private TextView mTextNtc1; private TextView mTextNtc2; private TextView mTextNtc3; // all temperatures are .2 points precision values in degrees Celsius final private Object mDataSync = new Object(); private boolean mMeasModeUpdateRequired; // set up when user switches between measurement modes and queues I2C expander command // to switch the mode private boolean mIsContinuousMode; // continuous mode (power is always on, no control) // burst mode (every cycle power on, read and power off required) private boolean mPowerState; private boolean mPowerUpdateRequired; private Thread mCommThread = null; private boolean mIsRunning = true; // the communication thread goes on unless onDestroy method is called @Override protected void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(R.layout.activity_main); // enforce the sensor to switch into continuous mode on startup mPowerUpdateRequired = true; mPowerState = true; mMeasModeUpdateRequired = true; mIsContinuousMode = true; mIrqImage = (ImageView) findViewById(R.id.image_led_irq); mGaugeObj = (GaugeView) findViewById(R.id.gauge_view_obj); mGaugeNtc1 = (GaugeView) findViewById(R.id.gauge_view_ntc1); mGaugeNtc2 = (GaugeView) findViewById(R.id.gauge_view_ntc2); mGaugeNtc3 = (GaugeView) findViewById(R.id.gauge_view_ntc3); mTextSynchro = (TextView) findViewById(R.id.text_synchro); mTextObj = (TextView) findViewById(R.id.text_obj); mTextNtc1 = (TextView) findViewById(R.id.text_ntc1); mTextNtc2 = (TextView) findViewById(R.id.text_ntc2); mTextNtc3 = (TextView) findViewById(R.id.text_ntc3); Switch switch_mode = (Switch) findViewById(R.id.switch1); switch_mode.setOnCheckedChangeListener(new CompoundButton.OnCheckedChangeListener() { @Override public void onCheckedChanged(CompoundButton buttonView, boolean isChecked) { synchronized (mDataSync) { mIsContinuousMode = isChecked; mMeasModeUpdateRequired = true; } } }); Switch switch_power = (Switch) findViewById(R.id.switch_power); switch_power.setOnCheckedChangeListener(new CompoundButton.OnCheckedChangeListener() { @Override public void onCheckedChanged(CompoundButton buttonView, boolean isChecked) { synchronized (mDataSync) { mPowerState = isChecked; mPowerUpdateRequired = true; } } }); switch_power.setChecked(true); // power is on by default mServiceManager = (TrickyManager) getSystemService(TRICKY_SERVICE); mCommThread = new Thread() { @Override public void run() { while(mIsRunning) { synchronized (mDataSync) { if (mPowerUpdateRequired) { if (mServiceManager.activate(mPowerState)) { mPowerUpdateRequired = false; } else { Log.w(TAG, "Cannot update power state"); } } if (mMeasModeUpdateRequired) { if (mServiceManager.setMode(mIsContinuousMode)) { mMeasModeUpdateRequired = false; } else { Log.w(TAG, "Cannot update measurement mode"); } } } mSensorData = mServiceManager.readSample(); if (mSensorData != null) { updateUI(); } else { updateNonIRQUI(); } try { Thread.sleep(POLLING_PERIOD_MS); } catch (InterruptedException e) { e.printStackTrace(); } } } }; mCommThread.setUncaughtExceptionHandler(new Thread.UncaughtExceptionHandler() { @Override public void uncaughtException(Thread t, Throwable e) { e.printStackTrace(); } }); mCommThread.start(); } @Override protected void onDestroy() { super.onDestroy(); try { mCommThread.join(POLLING_PERIOD_MS * 2); } catch (InterruptedException e) { e.printStackTrace(); } } private void updateUI() { runOnUiThread(new Runnable() { public void run() { float obj_temp = mSensorData.objectTemperature / 100.F; float ntc1_temp = mSensorData.ntc1Temperature / 100.F; float ntc2_temp = mSensorData.ntc2Temperature / 100.F; float ntc3_temp = mSensorData.ntc3Temperature / 100.F; String s_obj = String.format("%.2f °C", obj_temp); String s_ntc1 = String.format("%.2f °C", ntc1_temp); String s_ntc2 = String.format("%.2f °C", ntc2_temp); String s_ntc3 = String.format("%.2f °C", ntc3_temp); String s_synchro = String.format("Synchro = %d", mSensorData.synchro); mGaugeObj.setTargetValue(obj_temp); mTextObj.setText(s_obj); mGaugeNtc1.setTargetValue(ntc1_temp); mTextNtc1.setText(s_ntc1); mGaugeNtc2.setTargetValue(ntc2_temp); mTextNtc2.setText(s_ntc2); mGaugeNtc3.setTargetValue(ntc3_temp); mTextNtc3.setText(s_ntc3); mTextSynchro.setText(s_synchro); mIrqImage.setImageDrawable(getResources().getDrawable(R.drawable.led_green_hi)); Log.d(TAG, s_synchro + "Obj = " + s_obj + " NTC1 = " + s_ntc1 + " NTC2 = " + s_ntc2 + " NTC3 = " + s_ntc3); } }); } private void updateNonIRQUI() { runOnUiThread(new Runnable() { public void run() { mIrqImage.setImageDrawable(getResources().getDrawable(R.drawable.led_green_md)); } }); } }
簡単にするために、アプリケーションはAndroid Studioで作成され(sdkを正しく設定することを忘れないでください-4.4.4で収集しています)、不要なものはすべて切り離されます。しかし、ビルドにはAndroid.mkが再び使用されます。これは私にとってはこのように見えます。
LOCAL_PATH := $(call my-dir) include $(CLEAR_VARS) LOCAL_MODULE_TAGS := optional LOCAL_SRC_FILES := $(call all-java-files-under, src) LOCAL_RESOURCE_FILES := $(addprefix $(LOCAL_PATH)/, res) LOCAL_PACKAGE_NAME := TrickyDemo LOCAL_CERTIFICATE := platform LOCAL_STATIC_JAVA_LIBRARIES := android-support-core-utils-api24 include $(BUILD_PACKAGE)
アセンブリに間違ったライブラリのエラーまたはそれらのいくつかの欠如が含まれている場合、out / target / common / obj / SHARED_LIBRARIESを調べて適切な名前を探します。
すべてを収集する方法
今では、すべてを収集するだけです。ターゲットデバイスのパラメーターは次のとおりです。HW
:Nexus 7(2012 grouper)
OS:Android Kitkat 4.4.4 KTU84P
カーネル:tegra3_android_defconfig 3.1.10-gle42d16
最初に、カーネルをビルドします。
必要なカーネルソースは次のとおりです。
git clone https://android.googlesource.com/kernel/tegra.git -b android-tegra3-grouper-3.1-kitkat-mr2
ここからカーネルを構築するために必要なツールをダウンロードします。
mkdir arm-eabi-4.6 cd arm-eabi-4.6 git init git clone https://android.googlesource.com/platform/prebuilts/gcc/linux-x86/arm/arm-eabi-4.6/
カーネルをビルドする方法(カーネルのルートフォルダーにある):
ARCH=arm SUBARCH=arm CROSS_COMPILE=<path_to_arm_eabi-4.6>/arm-eabi-4.6/bin/arm-eabi- make tegra3_android_defconfig ARCH=arm SUBARCH=arm CROSS_COMPILE=<path_to_arm_eabi-4.6>/arm-eabi-4.6/bin/arm-eabi- make menuconfig ARCH=arm SUBARCH=arm CROSS_COMPILE=<path_to_arm_eabi-4.6>/arm-eabi-4.6/bin/arm-eabi- make -j4 zImage
カスタム変更をコピーしてmenuconfigを作成した後、デバイスドライバーセクションには、トリッキーな温度センサー用に選択したドライバーが含まれているはずです(menuconfig-上記のコマンドを使用してこの情報を参照してください)。カーネルは高速化しています。アセンブリ後、結果のイメージはkernel / tegra / arch / arm / boot / zImageにあります。
次はAndroidです。ソースからAndroid OSをビルドするには、長時間退屈しないように強力なコンピューターと、多くのディスクスペースが必要です(詳細はこちら)。私の場合、アセンブリはUbuntu 14.04 LTS x64で行われました(Windowsでのアセンブリはサポートされていません)。
必要なパッケージのインストールプロセスについては、ここで詳しく説明しています。、それで私はそれに止まらない。唯一覚えておくべきことは、異なるバージョンのJavaを使用して異なるOSバージョンを構築することです(Android 7ではOpenJDK Java 8、Nexus 7およびAndroid 4.xではOracle Java 6)。
Androidをビルドする前に環境をセットアップするには、こちらをお読みください。
リポジトリからソースをダウンロードするには、GitのフライバックであるRepoを使用します。これにより、すぐに多くのgitリポジトリを操作できます(インストールの詳細はこちら)。Repoをインストールした後、将来のソースがあるフォルダーに移動して、これを実行します。
repo init -u https://android.googlesource.com/platform/manifest -b android-4.4.4_r2 cd .repo repo sync
ダウンロードプロセスは約50 GBでダウンロードされるため、非常に時間がかかります。
次に、Nexusのバージョン4.4.4 KTU84Pの追加のバイナリを製造元から(Android OSソースのあるフォルダーのルートに)ダウンロードします。
https://dl.google.com/dl/android/aosp/asus-grouper-ktu84p-b12ce5f7.tgz https://dl.google.com/dl/android/aosp/broadcom-grouper-ktu84p-646d5a68.tgz https://dl.google.com/dl/android/aosp/elan-grouper-ktu84p-742223b3.tgz https://dl.google.com/dl/android/aosp/invensense-grouper-ktu84p-724c855a.tgz https://dl.google.com/dl/android/aosp/nvidia-grouper-ktu84p-e6d581dc.tgz https://dl.google.com/dl/android/aosp/nxp-grouper-ktu84p-27abae08.tgz https://dl.google.com/dl/android/aosp/widevine-grouper-ktu84p-57b01f77.tgz
バイナリの内容を解凍して抽出します。
tar -xvf asus-grouper-ktu84p-b12ce5f7.tgz tar -xvf broadcom-grouper-ktu84p-646d5a68.tgz tar -xvf elan-grouper-ktu84p-742223b3.tgz tar -xvf invensense-grouper-ktu84p-724c855a.tgz tar -xvf nvidia-grouper-ktu84p-e6d581dc.tgz tar -xvf nxp-grouper-ktu84p-27abae08.tgz tar -xvf widevine-grouper-ktu84p-57b01f77.tgz rm *.tgz ./extract-asus-grouper.sh ./extract-broadcom-grouper.sh ./extract-elan-grouper.sh ./extract-invensense-grouper.sh ./extract-nvidia-grouper.sh ./extract-nxp-grouper.sh ./extract-widevine-grouper.sh
まあ、私たちは収集します:
mkdir nexus cd nexus make clobber ( ) . build/envsetup.sh lunch aosp_grouper-userdebug make -j4
次のコマンドを使用して、以前のアセンブリを削除できます。
make clobber
アセンブリ後、最終イメージはout / target / product / grouperフォルダー(system.img、recovery.img、ramdisk.img、userdata.img)に配置されます。アプリケーションapkファイルは、out / target / product / grouper / obj / APPS / Jdts160demo_intermediates / package.apkにあります。
fastbootを介して画像を作成およびアップロードします。タブレットのFLASH(デフォルトでは、boot.img、system.img、recovery.img、userdata.img、ramdisk.img)にアップロードする必要がある画像と、コンテンツを含むandroid-info.txtファイルを含む.zipアーカイブを作成します。
require board=grouper require version-bootloader=4.23
ブートローダーのデフォルトバージョンが同じでない場合は、ここから完成したFactoryイメージイメージをダウンロードして、そこからflash_all.shスクリプトを実行できます。また、変更を入力するためのベースイメージとして使用することもできます。
boot.imgを更新するには、abootimgツールをインストールする必要があります。
sudo apt-get install abootimg abootimg --create boot.img -k zImage -r ramdisk.img
abootimgのコマンドでは、次のようなブートパラメータも指定できます。とコンソールが、それでもまだ動作しませんので、それで地獄に。
fastbootモードに移動します。オプション:
adb rebootブートローダー(タブレットの電源がオンで、usb経由で接続され、adbによって認証されている
場合)オフになっている場合は、電源ボタンと音量ボタンを押しながらオンにします。
fastbootの可用性を確認します(USBが接続され、USBデバッグが有効になっています)。
fastboot devices
次に、コマンドのリストを実行します。すべてを削除する必要はまったくなく、変更可能な部分のみが許可されます。
fastboot oem unlock fastboot erase boot fastboot erase cache fastboot erase recovery fastboot erase system fastboot erase userdata fastboot -2 update image.zip
前の段落で何かが間違っていることを理解する方法
実際、タスクを完了するプロセスでは、詳細を深く正直に整理する時間があまりなく、ネットワークの空きスペースにある小石を通り抜けました。タスクが閉じられた後、何を、どのように、どこで実行できるかについての分析と読み取りが異なって開始されました。結果は小さなリストです:
- OSの変更は、アセンブリ中に考慮されるカーネルとOS構造に直接ではなく、多くのオーバーレイを書き込むことにより、devices / asus / grouper / ...フォルダーで行うことをお勧めします。主な情報源と同じ構造をブロックできるかどうか、または特定の要件があるかどうかは完全にはわかりませんでした。
- audio-jack . , , - . すなわち:
- uart-1 & uart-4 debug, pinmux GPIO not_used/disabled.
- Google usb-uart FTDI , 50, .
- make menuconfig uart uart`. , .
- fastboot bootloader command line . , , .
- , . system