過去に、ロボットは劇的に変化しました。 約束どおり、改善点を共有したいと思います。
それで何が行われたのですか:
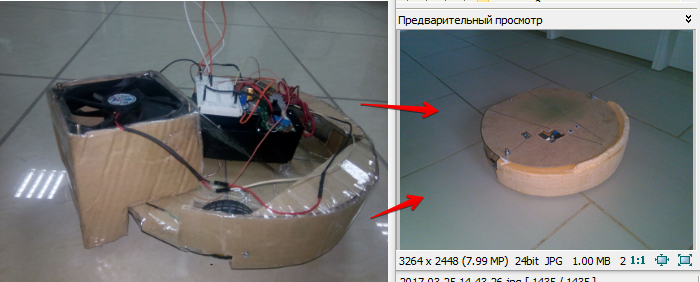
1.ボール紙ベースの代わりに、9mmの合板円があります。これにより、スクリードではなく、通常のネジを使用してロボットのすべての詳細を適切に固定できました。
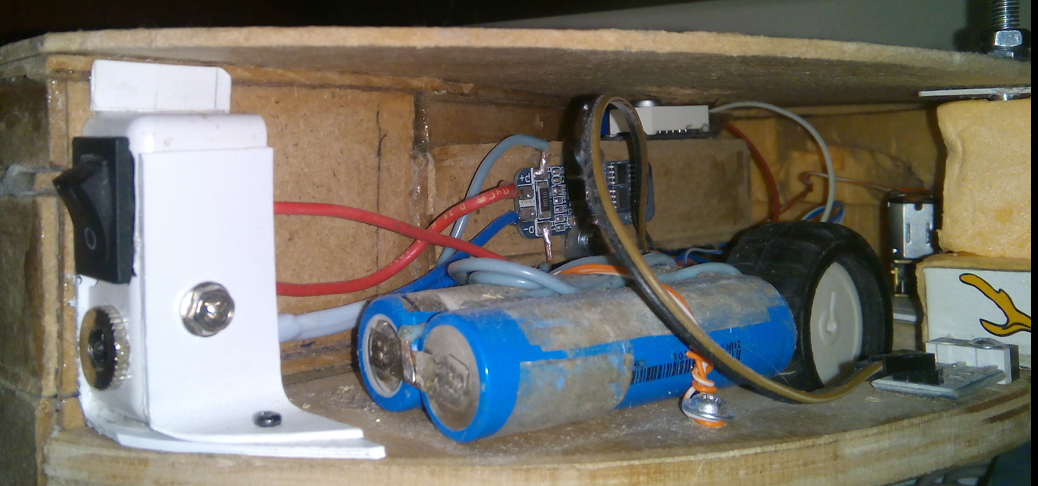
2.次に変換されるのは、掃除機ブロックでした。 彼はモーターとタービンを同じままにしたが、それらを「パンケーキ」に入れず、タービンをケーシングの前面に運んだ。 私は自家製の製品でこのようなものを見たことがない。 このトリックにより、掃除機の高さを8.5 cmに下げることができ、一部のキャビネットの下でもクロールできます。 ハウジング自体は、細い繊維板から新たに組み立てられます。
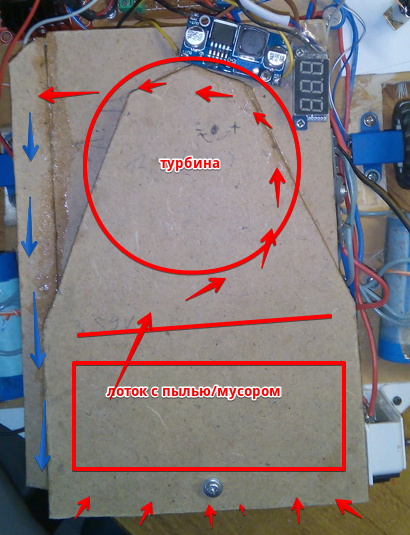
「排気」空気は、フィルターを取り付けた後でも十分に埃っぽく、すべての埃が左のモーターに直接吹き付けられたため、ハウジングの外側で除去する必要がありました。 また、ケースに「一時的に」DC / DCステップアップボードを掛けて、タービンの供給電圧を上げました。 入力電圧は+ 12Vですが、これは中/大汚れを確実に吸収するには不十分です。 約+ 16Vの電圧で、牽引力はすでに十分です。 上げることができますが、ノイズが増えます。 また、電圧計を掃除機の本体に(再び「一時的に」)取り付けて、現在のバッテリー充電量をほぼ決定しました。
3.分布の隣には「黄色」ギアモーターがありました。 彼らは大きなノイズのために収まりません。 はい、トルクを失うことなくこれらのエンジンの速度を下げるために、私は通常成功しませんでした-ロボットは部屋の周りを走り回って猫を怖がらせていました)
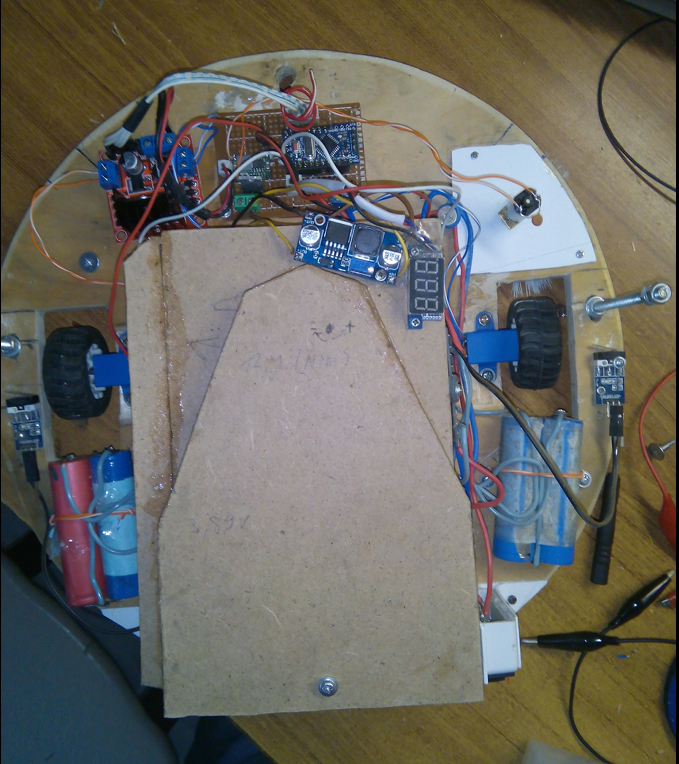
インターネットで、小さなN20エンジンに出会ったので、それらを使用することにしました。
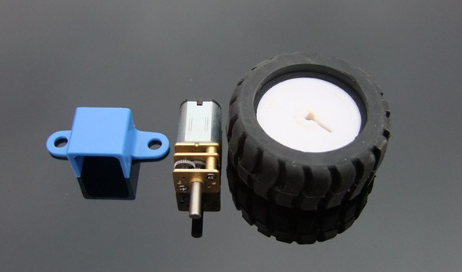
しかし、2つのトラブルが彼らに起こりました:何らかの理由で、売り手は私に異なるギア比の両方のエンジンを送って、それらがプラットフォームに設置されたとき、それらは中国の黄色のギアモーターよりもさらに騒々しいことが判明しました。 おそらく、モーターとボディの間に一種の「ダンパー」を作るとノイズを減らすことができますが、今のところ、ロボットが狂ったように部屋を歩き回るのを止めても、他のモーターを探すのをやめました)最終的に同じL298Nを置きます。
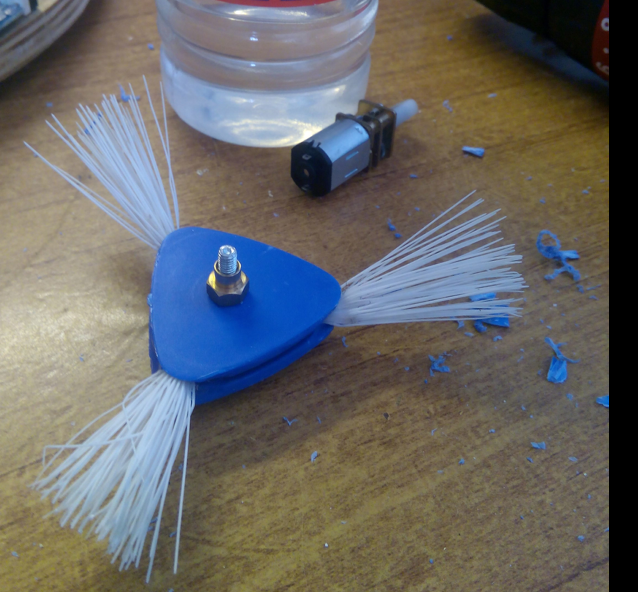
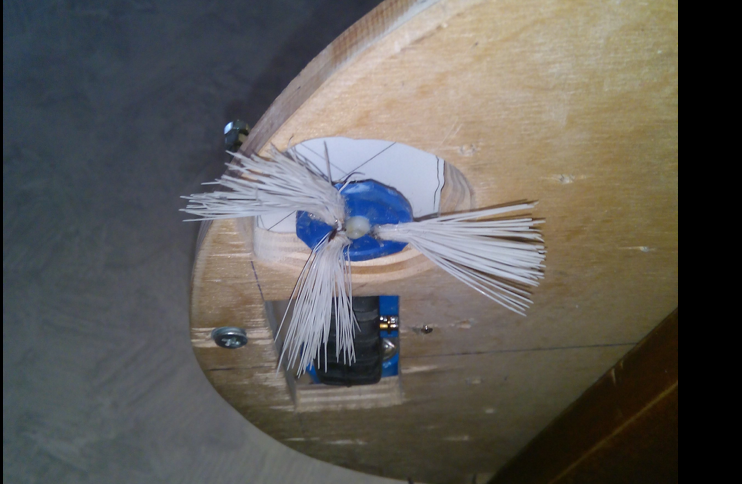
4.ロボットには、ブラシ付きの別の小さなモーターが追加されました。 即興の手段でブラシを作りました。
5.フロントバンパー。 多くの異なるオプションを試したので、それをいじらなければなりませんでした。 その結果、私はペノプレックスに落ち着きました

また、壁センサーとして、最も単純なエンドスイッチを配置しました。 追加のスプリングは必要ありませんでした-ボタンは、障害物に触れた後にバンパーを戻すのに十分な伸縮性があります。
6. 3つのリチウムバンク用にBMSコントローラをインストールしました。 当初は4つ入れたかったのですが、4つの銀行のBMSに欠陥がありましたが、「一時的に」そのようになりました

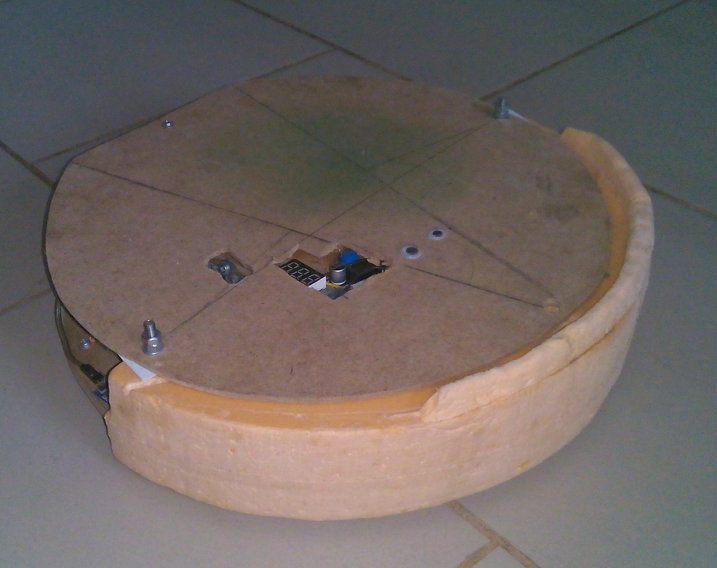
その結果、適切な予算で、シンプルですが、非常にうるさいロボット掃除機ができました。
読者がどのモーター/ギアボックスを使用するのが良いか教えてくれたら、感謝します。 静かで動力のある3-12v、1分間に約60回転のシャフトが必要です。 ありがとう