
アイデアはシンプルでした。鳥が飛び込む-vuuuuuh-電話に表示されます。 これを実行して実装する方法を理解することは残っています。
記事では:
- Raspberry Pi B +でCaffeを起動(長い間これを望んでいた)
- データ収集システムの構築
- ニューラルネットワークの選択、アーキテクチャの最適化、トレーニング
- インターフェイスのラッピング、選択、および添付
すべてのソースコードが公開されており、結果のデザインの展開の完全な順序が説明されています。
正直に言うと、すべてがうまくいくとは確信していませんでしたが、最終的なアーキテクチャについてはあまり確信がありませんでした。 仕事の過程で、彼女は大きく変わりました。 したがって、既製のバージョンが既に存在する場合、Habréに書き込みます。 開発の浮き沈みは、GitHubとブログで追跡できます。ブログでは、キャンペーンに関する小さなレポートを作成しました(記事の最後のリンク)。
「鳥を認識したい」というアイデアには、何十もの実装があります。 作業の開始時に、フィーダーに来る鳥をシステムが自動的に検出し、鳥の種類を判別し、最適な写真を選択して、どこかにアップロードし、出席の統計を保持することを望みました。 すべてがここから出てきたわけではありません。
コンプレクトゥハ
- システムコア:Raspberry Piの最初のモデル、B +。 ほぼ仕事なしで1年半私の引き出しに横たわった。 今、もちろん、RPi 3を使用する方が論理的です。より多くの、より高速でより多くのメモリがあります。 RPi 3の価格は約3〜3.5 trです。
- RPi用のSDカード。 32ギガバイトのようです。 私は長い間買った、私は価格を覚えていません。 500-1000r付近
- 電源(microUSB)。 彼の株から取りました。 繰り返しますが、どこか500-1000rです。
- カメラ:
- 最初は、Rpiの最も基本的なカメラ(Raspberry Pi Camera 1.3rev)を使用する予定でした。 しかし、彼女は始めませんでした。 テストで判断すると、RPiコネクタまたはケーブルが死亡しました。 別のオプション-fireが飛んだ。 近い将来、私は最終的にそこに何が間違っているのかを理解するでしょう。 そのようなカメラの価格は、レンズと1.5t.r-2.5 trの特性に依存します。
- そこで、最初の解決策として、コンピューターからウェブカメラを設置することにしました。 通常のクリエイティブ、Rpi Bの利点+多くのUSBポート。 FaceCam100x。 私は今それを購入していません。1t.r。の近くのどこかにあります。 品質が悪いため、オプションは悪いです。 しかし、ベースを取得し、それをテストします。
- WiFiドングル 最も一般的なのは、400r用TP-Link TL-WN727Nです。
- 実際にはフィーダー。 私はそれをするのが面倒だったので、すぐに購入しました。 2t.rのどこかで管理 配達あり
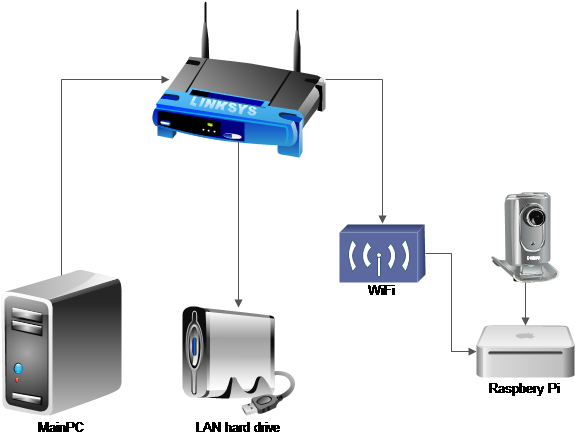
インフラ
プロジェクトを担当する私のホームネットワークの部分には、次の構成があります。
Rpi +カメラが窓の近くでハングします。 便利なマウントと見晴らしを良くするために、多くの実験を行いました。
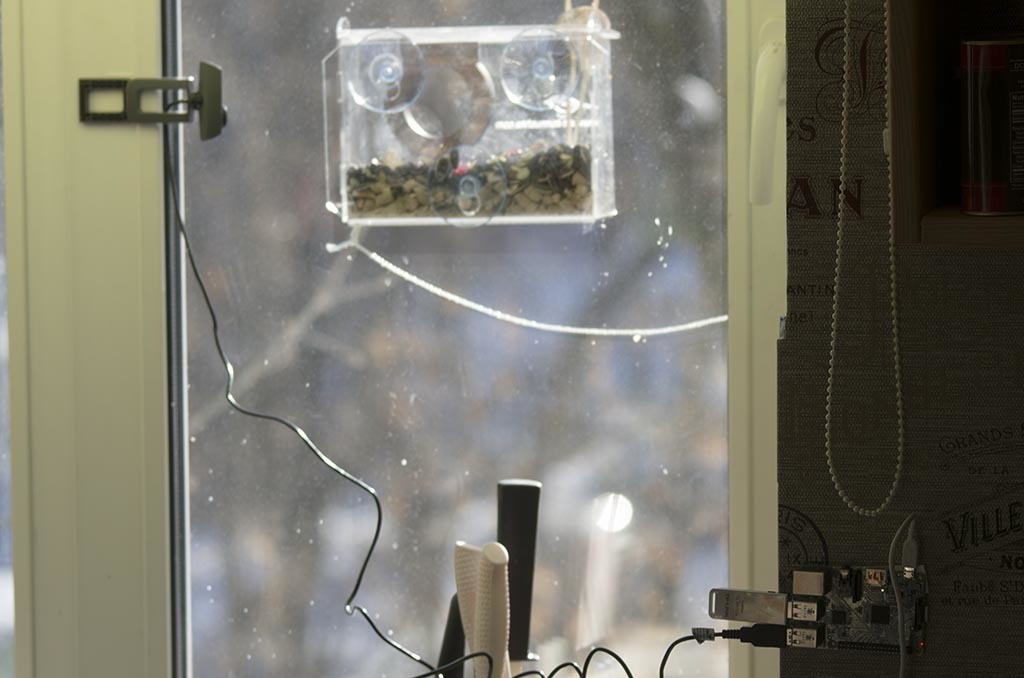
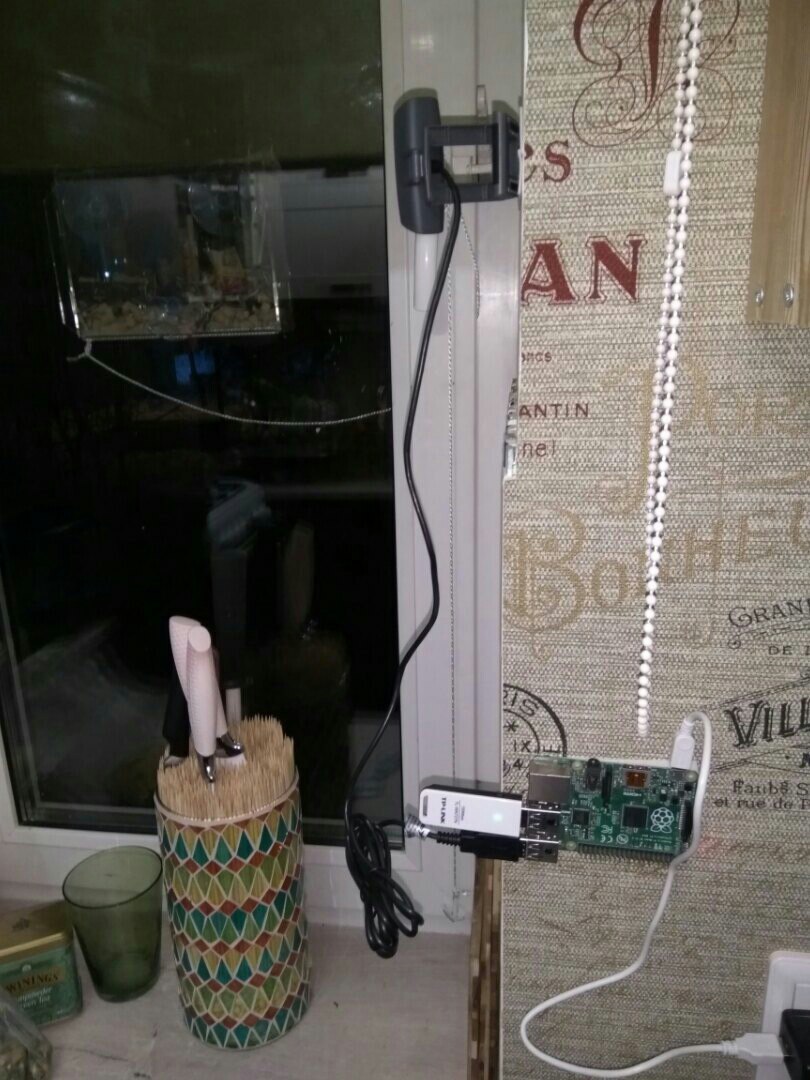
その結果、ナイフスタンドに貼り付けました。 可動式で、さまざまな角度からベースにダイヤルできます。 私の妻がこのアイデアを気に入ったと言っているわけではありませんが、これは一時的な解決策であることを保証します。

写真は次のように取得されます。



ウェブカメラの品質はそれほど熱くありません。 しかし、原則として、何が起きているかは理解できます。
アーキテクチャに戻りましょう。 WiFiモジュールは、ルーターに接続されているRpiに接続されます。 写真はネットワークドライブに保存されます(WD MyBookライブ)。 ベースをセットアップするには、これが必要な条件です(RPiに十分なフラッシュドライブがありません)。 もちろん、使用するときはオフにすることができます。 しかし、私にとっては便利です。
Rpi自体はモニターなしでハングします。 その管理、プログラミング、および構成は、SSHを介してメインコンピューターから実行されるようになりました。 最初は、モニターに貼り付けて構成しましたが、これは必要ありません。
ベースコレクション
適切に組み立てられたベースは、適切なニューラルネットワークの選択よりもはるかに複雑です。 壊れたマークアップまたは非代表的なデータを使用すると、 ResNetの代わりにVGGを使用するよりもシステムの品質が大幅に低下する可能性があります。
基地の収集は、大量の手作業であり、未熟練労働者ですらあります。 特に大規模なデータベースのマークアップには、Yandex.TolokおよびAmazon Mechanical Turkサービスがあります。 私はそれらを使用することを控えます:私はここで長くはなく、すべて自分で手動でマークします。 でも、多分それをそこで練習し、使用する練習をするのは理にかなっているでしょう。
当然、このようなプロセスを自動化したいです。 これを行うには、何が欲しいかを検討してください。
私たちの状況のベースは何ですか:
- システムはビデオで動作します-したがって、ビデオからのフレームでなければなりません。 古いRPiでビデオシーケンスを分析する能力は、明らかに十分ではありません
- システムはビデオ内の鳥を認識する必要があるため、データベースには鳥が存在するフレームの例と、鳥が存在しないフレームの例を含める必要があります。
- システムは画質を認識する必要があります。 そのため、データベースにはフレームの品質を決定するマークが必要です
- システムは、認識する鳥の種類ごとにフレームのセットを持っている必要があります
実際、イベント「鳥の到着」が発生します。 このイベントでは、どのような鳥が飛び込んだかを判断して、良いショットをとる必要があります。
最も簡単な方法は、些細な「動き検出器」を作成し、その出力全体をダイヤルすることです。 モーション検出器を最も簡単な方法で作成します。
数行のコード:
import cv2 import time video_capture = cv2.VideoCapture(0) video_capture.set(3,1280) video_capture.set(4,720) video_capture.set(10, 0.6) ret, frame_old = video_capture.read() i=0 j=0 while True: time.sleep(0.5) ret, frame = video_capture.read() diffimg = cv2.absdiff(frame, frame_old) # d_s = cv2.sumElems(diffimg) d = (d_s[0]+d_s[1]+d_s[2])/(1280*720) frame_old=frame print d if i>30: # 5-10 , if (d>15): # cv2.imwrite("base/"+str(j)+".jpg", frame) j=j+1 else: i=i+1
検出器の結果
検出器はあらゆる動きによってトリガーされました。 その始まりと終わりに。 検出器の動作の結果、約2000フレームのベースが1週間に募集されました。 1フレームおきに鳥がいると仮定できます=>鳥の約1000枚の画像+鳥以外の1000枚の画像。
視点があまり動かないことを考えると、ベースのプラスまたはマイナスで十分であると仮定できます。
ベースマークアップ
マークアップのために、単純なpythonプログラムを作成しました。 以下、ソースコードへのリンク。 マーキングの手助けをしてくれた妻に感謝します! 殺された時間の2時間:)そして、私は数時間を自分で過ごしました。
各写真について、2つの標識がマークされました。
合計で、各画像に2つの値のベクトルがあります。 さて、例えばここに:

明らかに、品質はゼロ(0)であり、座っている-シジュウカラ(2)です。
合計で、ベースは鳥のいるフレームの約半分で、半分は空であることが判明しました。 同時に、tits-Lazorevokはベースのわずか3-5%でした。 はい、それらから大きな基盤を獲得することは困難です。 そして、はい、これらの3-5%(〜40枚の写真)から学ぶことは非現実的です。 その結果、私は普通のおっぱいでのみ訓練する必要がありました。 そして、遅かれ早かれ、紺breedの品種のベースがより多く入力されることを願っています。
ベース拡張
今、私は物語の連続性を保つためにステージを飛び越えます。 ネットワークについては、ネットワークの選択とそのトレーニングについて次のセクションで説明します。 アゾレスを除き、すべてが多かれ少なかれそこで訓練されました。 ベースに基づいて、フレーム認識精度の割合は約95%でした。
競争と実際の機械学習とは、これらは互いに関係のない2つのことであると言うと、私を一見のように見ています。 競技会での機械学習の課題は、グリッドの最適化と抜け穴の検索の問題です。 まれに、新しいアーキテクチャの作成。 実際の機械学習のタスクは、ベースを作成することです。 さらなるリトレーニングの募集、マークアップ、自動化。
このため、フィーダーの問題が気に入りました。 一方で、それは非常に簡単です-それはほとんど瞬時に行われます。 一方、それは非常に明らかです。 ここでのタスクの90%は、非競争的なチアゴモチンです。
上記のスコアは、この種のタスクには非常に小さく、最適ではありません。 「安定性」を意味するものではありません。 4〜5個のカメラ位置のみ。 窓の外の天気。
しかし、それは「第一段階」アルゴリズムの作成に役立ちます。 これは良い基盤を獲得するのに役立ちます。
上記で説明した検出器を変更します。
if (d>20): frame = frame[:, :, [2, 1, 0]] # transformed_image = transformer.preprocess('data', frame) # net.blobs['data'].data[0] = transformed_image # net.forward() # if (net.blobs['pool10'].data[0].argmax()!=0): # 0 - misc.imsave("base/"+str(j)+"_"+ str(net.blobs['pool10_Q'].data[0].argmax())+".jpg",frame) j=j+1 else: #- : ?! misc.imsave("base_d/"+str(k)+".jpg",frame) k=k+1
ベースの設定方法!? 以前何をしましたか?
以前は、通常のベースを採用しました。 そして今-エラーのデータベースを取得しています。 ある朝、グリッドはおっぱいとして認識される500以上の状況を生成しました:




しかし、私に聞かせて! たぶんあなたのグリッドが機能していませんか? 画像をカメラからグリッドに転送したときにチャンネルをミックスしたのでしょうか?
残念ながら、ありません。 これは、少量のデータでトレーニングされたすべてのグリッドの運命です(特に単純なネットワークの場合)。 トレーニングセットには、6〜9の異なるカメラ位置しかありませんでした。 少しフレア。 少しの外来ノイズ。 そして、グリッドが完全に新しいものを見ると、間違った結果を投げ出す可能性があります。
しかし、これは怖くない。 結局、私たちはコレクションベースをねじ止めしました。 データベースには300〜400個の空のフレームしかありません。状況は改善されています。 午前中に500の誤警報が発生する代わりに、すでにゼロになっています。 何かと鳥だけが、総数の2/3しか検出されませんでした。 私はこれらを認識しませんでした:


それらのコレクションについては、上記のコードに「else」があります。 1日の動き検出のベースを簡単に表示し、2〜3パスを選択します。 これらの写真を撮るのに約20秒かかりました。
システムの実際の実装は、数日ごとにグリッドをねじる必要がある継続的なワークフローです。 また、追加のメカニズムを導入する場合があります。
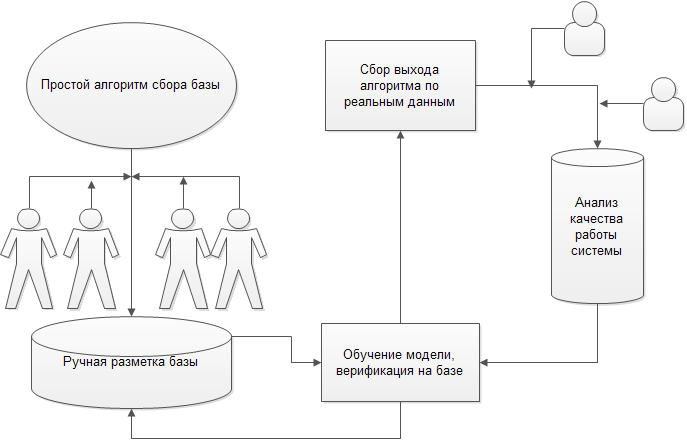
実際の問題の解決策は、再訓練、再訓練、収集、収集の最適化のすべてのプロセスを備えたこのようなスキームの構築です。
モデルを思いついて構築することは、良いモデルを訓練することよりもはるかに強力です。 多くの場合、SIFT、SURFなどの古いアルゴリズムを使用する必要があります。 また、訓練されたグリッドを取得することもありますが、完全に異なるタスクからです。 たとえば、顔検出器。
それだけですか? ベースの準備はできていますか? システムは機能しますか? もちろん違います。 窓の外は、柔らかくて白いふわふわの雪です。 しかし、それはタフで氷のようになります。 春が来ています。 過去2日間で、ロザリオは再び殺到しました。

そこから太陽は照りません。 雪が溶けました。 滴がたたきました。
このようなタスクに適した基盤は、春+冬+夏+秋です。 すべての鳥、窓の外のさまざまな種、さまざまな天気。 データベースの収集方法については、すでに長い記事をここに書いています。
このような作業には、さまざまな条件の鳥ごとに少なくとも2〜3千フレームのベースが必要なようです。
そのようなことはありません。
ベース生成
ベースは自動的に補完され、歪みが発生します。 これにより、安定性が大幅に向上します。 私はすべての可能な増分をしませんでした。 より多くのことができ、品質を向上させることができます。 私がしたこと:
- 写真のミラーリング
- 画像を15度以内の角度で回転させます
- 写真の作物(各5〜10%)
- さまざまな組み合わせでの画像チャンネルの明るさの変化
そして、これを追加することができます:
- ホモグラフィー
- 画像を2つの部分に分割し、新しい部分を接着します。 このコンテストでは、増分が非常にうまくいきました。
- さまざまな色の正方形で画像の一部をノックアウトする
- 非線形変換
正直に言うと、これらすべての歪みを完全に紹介したわけではありません。 もっと時間がかかります。 しかし、それでも基地の品質はそれを上回っていません。 これは、ほんの数パーセント戦うためのKaggleではありません。
ネットワークのセットアップと開始
設置
私が自分で理解したかった主な問題の1つは、単純なデバイスでCVのMLフレームワークを実行する機能です。 たとえば、Raspberry Piの場合。
誰かが私のためにそれについて考えたことを神に感謝します。 GitHubには、ほとんど指示のない便利なリポジトリがあります。
RPi B + Caffeとそれに必要なものはすべて、1日のうちのどこかに組み立ててインストールできます(1時間に1回立ち上がって次のコマンドを実行する必要があります)。 RPi3では、私が理解しているように、はるかに高速にできます(2〜3時間で対処しなければなりません)。
記事にたくさんのLinuxコマンドが散らばらないようにするために、 ここでリンクを省略します。 カフェが行く! うまくいく!
最初は、 CaffeNetやVGG16など、ある種の単純なメッシュを使用することを考えました。 しかし、 RPiでのCaffeポートの作成者は、 SqueezeNetを使用することを強く推奨しました 。 私はそれを試してみて、私はそれが好きだった。 高速で、かなりのメモリを消費します。 もちろん、精度はResNetレベルではありません。 ネットワークを展開する最初の試みはあまり成功しませんでした。 ネットワークは400 MBの空きRAMのうち500 MBを消費しました。 すぐに、主な問題は出力層にあることに気付きました。 それは1000ピンのImageNetからでした。 必要な出力ニューロンは1ダースだけでした。 これにより、ネットワークのサイズがすぐに150メートルに縮小されました。 グリッド自体は非常に興味深いものです。 AlexNetの精度に匹敵します。 同時に、著者によると、50倍高速です。 グリッド自体は、次の原則を実装しています。
- 3 * 3パッケージは1 * 1パッケージに置き換えられます。 このような各置換により、パラメーターの数が9分の1に削減されます。
- 少数のチャネルのみが残りの3 * 3畳み込みにフィードしようとします
- 畳み込み層が大きな活性化領域を持つように、サイズの縮小は可能な限り遅く行われます
- 出口で完全に接続されたレイヤーを完全に拒否します。 代わりに、それらはavg-poolingを通じて畳み込み層から認識ニューロンへの直接出力を使用します
- 残留層アナログの追加
合計 ローカルコンポーネントがあります。
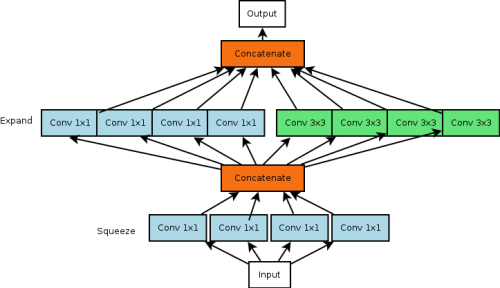
そして、これらのローカルのものから作成されたグローバルなものがあります:

アイデアは良いです。 RPi3では、どうやらリアルタイムが得られます(10〜15 fpsが必要だと感じています)。
RPi B +では、1秒あたり1.5〜2フレームでした。 まあ、もっと、私は正直に数えませんでした。
Caffeの下のポートの作成者は、C ++を介してグリッドを使用してパフォーマンスを改善しました。 しかし、私はPythonにドラッグしました。 それを開発するのははるかに高速です。
ネットワークトレーニング
まず、上で述べたように、最後に完全に接続されたレイヤーを変更する必要がありました。
layer { name: "conv10_BIRD" type: "Convolution" bottom: "fire9/concat" top: "conv10" convolution_param { num_output: 3 kernel_size: 1 weight_filler { type: "gaussian" mean: 0.0 std: 0.01 } } } layer { name: "conv10_Q" type: "Convolution" bottom: "fire9/concat" top: "conv10_Q" convolution_param { num_output: 3 kernel_size: 1 weight_filler { type: "gaussian" mean: 0.0 std: 0.01 } } }
2つの出力に置き換えました。 1つの出口-鳥の存在+そのタイプ。 2つ目は品質です。
RPi B +での最終的な作業速度は、フレームあたり〜2〜3秒+その前処理(余分な変換からコードを削除し、OpenCVがデータを直接受信する形式でトレーニングするため-1.5〜2秒です)。
実際には、「品質」に関するレイヤーのトレーニングは依然として混乱です。 私は3つのアプローチを使用しました(はい、あなたは正しくアプローチし、特別な損失レイヤーを取ることができます。しかし、怠:
- それぞれがL2正則化(ユークリッド)を持つ9つの出力ニューロン。 決定は期待の中心に向かって引っ張られました。 そうではありません。
- 9個の出力ニューロン。ただし、1〜0ではなく、ある程度の期待が散在しています。 たとえば、「4」というラベルのフレームの場合:0、0、0.1、0.4、0.9、0.4、0.1.0、0。このアプローチでのガウス誤差は、サンプルのノイズを滑らかにします。 トレーニングは多かれ少なかれ行きましたが、私は正確さが好きではありませんでした。
- SoftMax出力を持つ3つのニューロン。 「鳥なし」、「品質の悪い鳥」(品質指標の値「0」)、「通常の品質の鳥」(品質指標の値「1〜8」)。 この方法が最も効果的でした。 統計は平凡ですが、少なくとも何らかの形で機能しています。 さらに、トレーニング時に、レイヤーに少し重みを付けます(0.1)
左-最後。 彼は何とかして働いた唯一の人です。
鳥が基地にいるので、すべてが順調です。 正しい分類の88%-90%。 同時に、もちろん、すべてのアゾレスの100%の損失。 ベースを入手した後、品質が向上しました。
ベースからの増分により、わずかに改善されています(上記を参照)。
情報出力、電報
ラストマイルまで進みます。 ユーザーに写真を配信する必要があります。 いくつかのオプションがありました。
- ネットワークドライブに残します。 落胆。 自宅でしか見ることができません。
- Twitterで共有します。 マイナス-私はそれを使用しません。 習慣なし。 さらに、フィードでこのようなスパムを本当に必要とする人(1日に100羽の鳥がやってくることがあります)
- メール。 試しました、知っています。 ひどい。 いや もちろん、私はかつて電子メールクライアントで望遠鏡のネットワークの管理を行っていましたが、もうしたくありませんでした。
- 電報 私にとっては何か新しいことですが、すでに半年間電話で使用されており、5回使用されています。
- HTTPクライアントを作成します。
Telegramを読み、そこにあるすべてのものがそれほど怖くないこと、さらにいくつかの神秘的な「チャンネル」があることを確認した後、私はそれを使うことにしました。 続行するのが怖い。 私はタスクに1日か2日を費やさなければならなかったようでした。 最後に、私は勇気を出して、作品の前面に関するドキュメントを読みました。 夕方に1時間割り当てられます。
そして、私は嬉しく驚きました。 不可解にも嬉しい驚き。 この時間は、私が念頭に置いていたすべてを書いて接続するのに実際上十分でした。 いいえ、もちろん私は嘘をついています。 2時間過ごしました。 それからもう1つ半は、不要なホイッスルを締めます。 だから、それはすべてシンプル/便利/絶望的に動作します。 基本的にボットを作成します。
- 電報に行く
- 「@BotFather」ボットを接続します。 書き始めてから、指示に従ってください。 15秒後にボットができました。
- プログラミングに便利な言語を選択し、適切なラッパーを見つけます。 私はpythonを取りました。
- そこにある例-90%が必要な機能を閉じます。
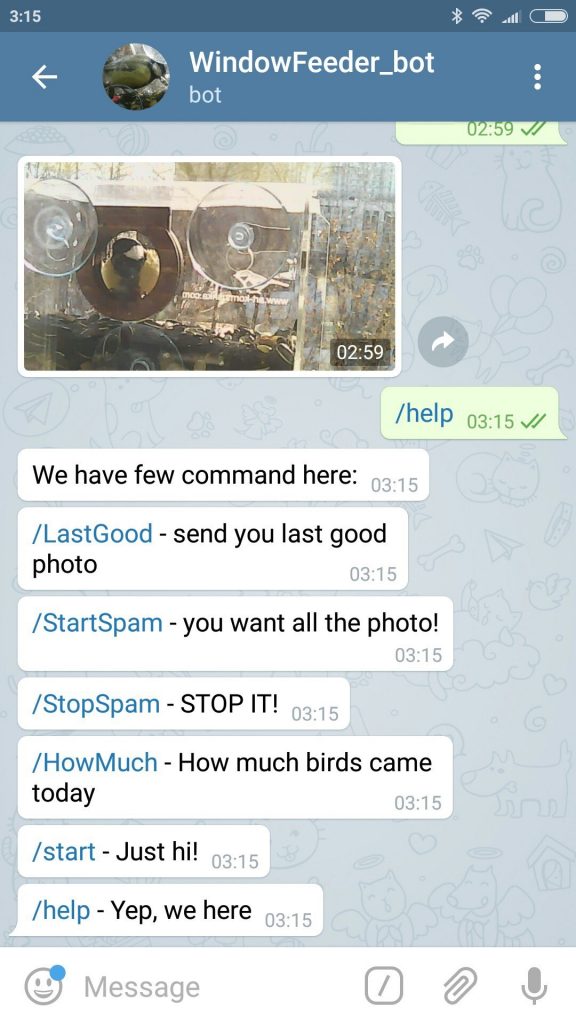
私が理解しているように、/ startおよび/ helpコマンドの処理は非常に望ましいです。
スマートな家を作るなら、これなしではできないと感じます。
ボットができること。 ボットへのリンクは以下になります:
- リクエストに応じて、最後のフレームに鳥を送ります。 後で2つのチームに分割します。1つのフレームと良いフレームです。
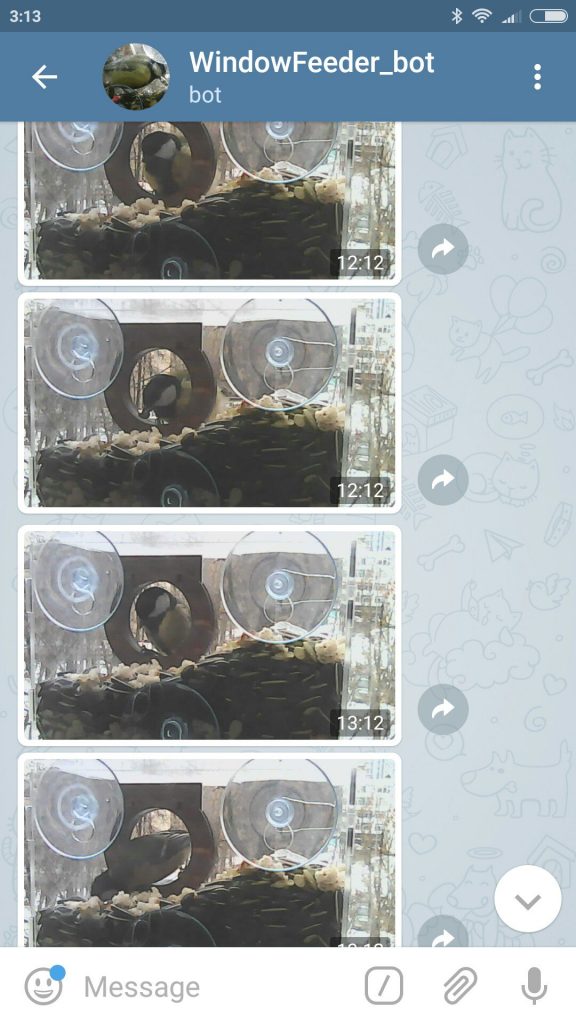
- 「給餌トラフから鳥と一緒にすべての新しいフレームを転送する」モードをオンにします。 鳥が飛ぶたびに、興味のあるすべての人にその写真を送ります。 これはRaspberry Piで回転する経済全体であるため、このモードに接続できる人の数に制限を設け、過負荷にならないようにしました(15人)。 同時に、最後の10人を定期的にリセットして、他の人が視聴できるようにします。 このチャンネルでは、このモードが複製されます-@win_feed。
- 今日は何羽の鳥がいました。 簡単な質問は簡単な答えです。
- 神秘的なインラインモード。 これは、メッセージにテキストを入力するときにボットにリクエストを送信できるテレグラムのことです。 なぜ追加したのかわかりません。 彼はあまりにも夢中になり、止められませんでした。 リクエストでは、鳥と一緒に最後の5枚の写真の出力を追加しました。 「アーカイブへのアクセス」と入力します。 むしろ、実験のために。
ボットは認識と組み合わされます。 そのテキストはソースにあります。 Capture.pyファイル。
ボットへのリンクとボット出力のあるチャネル-以下、記事のフッターに。
そして、これがスパムモードです。
開発方法
改善方法と次に何をすべきかについて、さらにいくつかのアイデアがあります。
- PRiからカメラを受け取ります。 このタスク専用の優れたカメラを選択することは可能です。
- より完全なベースにダイヤルします。 別のウィンドウでハングアップし、夏にベースにダイヤルします。 国内の拠点を募集するなど。
- 複数の種類の鳥を作ります。 少なくとも悪名高いブルーホール。
さらにグローバルな計画があります。 理想的には、来年の冬、完全に自律的な給餌トラフを作りたいと思います。 彼女を田舎に掛けて街から管理する。 しかし、このためには多くの問題を解決する必要があります。 まず、適切なプロバイダーを見つけて、めちゃくちゃ多くのトラフィックを消費しないシステムを作成します。 第二に、リモート制御可能なフィードディスペンサーを作成します。 第三に、この奇跡すべてを単一の小さなバッグに適切に組み立てること。
時間予算
上記の多くを他のタスクと並行して行いました。 そのため、評価に偏りが生じる可能性があります。 あなた自身のために同じことをしたい場合、方法の一部は私のソースをカットするのに役立ちますが、多くを繰り返す必要があります。
- 古いRPIを起動します。 テスト、確認、WiFiの接続、ネットワークドライブの接続-3〜4時間。
- 観察用のアセンブリレイアウト、吊り下げ-1時間
- 最初のベースビルドプログラムの作成-0.5時間
- ベースの分析、分析、マークアップ-5時間、そのうち2-妻。
- RPiカフェへのインストール-約10〜15時間。 システムアップデート、Pipモジュールのアセンブリなど。 プロセスは純粋にバックグラウンドです。 1時間に1回、何が起こっているのか、何をするのかを確認し、さらに実行します。
- SqueezeNetのマニュアルの読み取り、トレーニング、ネットワークの起動、最適化、テスト、比較、トレーニングプログラムの作成、テスト-トレーニングには約4〜5時間+ 4時間。
- 認識モーション分離プログラムの更新-1時間
- テレグラムボット(すべての時間)-4時間
- 収集されたベースの分析、作業の分析、追加トレーニングなど。 -3時間+ 5時間のコンピューター時間
現実には、このすべてが3〜4週間続きました。 ソースコードと新しいRPiを使用すると、2〜3倍速く処理できるように思えます。
ソースコード
実行中のフォームでのすべての外観のリンクを広げます。 プロセス内のすべてのソースへのリンク。 使用されているすべてのフレームワーク/ガイド/フォーラムへのリンク
テスト方法
いくつかの制限があります。
- ラズベリーパイでの認識とテレグラムボットのスピン。 彼にはあまり力がないことは明らかです。 そして、Habr効果から、彼はうそをつくかもしれません。 そのため、私は特に部品を限定しました。 「新鮮な写真を送る」機能を制限しました。 これは最もロードされた関数です。 合計で、この機能の最初の15人にアクセスしました。 私がチェックした5-6人で、それはうまく働きます。 さらに、定期的にリセットするので、誰かが興味を持っている場合は、それらをオンにすることができます。 さらに、この機能はこの Telegramチャネルで複製されます。 ボットが再起動し、habroeffectがプルしない場合、重複するボットアカウントを登録しました。 それから私は落ちたと書いて、彼にそれを投げます、そして、私はアドレスを与えません。 その後、写真はチャンネルでのみ表示できます。 それから、私は興味がある人にそれを返します-postest。
- 鳥。 1月に、彼らは絶えずトラフに飛んだ。 1日あたり200の到着がありました。 しかし、時間が経てば進むほど、彼らは少なくなりました。 理由がよくわかりません。 群れが移住したか、種を食べ過ぎたか、春を感じたかのどちらかと言うよりコーシャの場所を見つけました。 先週、1日に2-3羽の鳥が到着しました。 そして1つでもありません。 あなたが接続するが、鳥がいない場合-申し訳ありません。
- 誤検出があります。 あまりありませんが、あります。 通常、それらは何らかの効果によって引き起こされます。 これが観察されず、友人がなる前に。 したがって、彼らはしばしば連続して行きます。 さらに。 春です。 雪が溶ける様子(2、3日後)-何十回もわなにかかったり、過ぎ去ったりするのだと思います。
- 鳥は午前8時から午後6時の間を飛行します(モスクワ時間)。
- フィーダーは継続的に動作しません。 鉄片を分解して改善したいです。 さらに、すぐに雪が溶けます。 1週間オンにしてから、オフにします。 私は間違いなく来年の冬に、おそらくもっと適切な形でそれを返すでしょう。
怖いことを願っています。
これがボットへのリンクです-@WindowFeeder_bot
そして、こちらが再びチャンネルです-t.me/win_feed
ソースコード
プロジェクトリポジトリ 。
データベースをマークアップするためのプログラムは次のとおりです。 Windowsとubuntuでは(何らかの理由で、OpenCVはキーボードコードを異なる方法で認識します。
ネットワーク学習の例を次に示します。 私の意見では、Caffeにとって非常に便利です。 自分で何かを教えるとき、私はしばしばこの種の似たようなプログラムを手に入れます。
これがメインコードです。 ここでは、モーション検出器、テレグラムボット、認識用ニューラルネットワークが実装されています。
これが写真のベースです。 ほとんどの写真にはテキストファイルがあります。 2つの数字があります。 最初は鳥の種類です。 2番目は、画像の品質です(鳥がいる場合にのみ関連します)。 テキストのない写真もあります。 鳥は常にいません。 VOC2012のデータベースに参加して、トピックとはまったく関係のない画像を含むサブサンプルを作成しました。あなたは子猫や犬を見る-驚かないでください。
あなたのベースを入力すると、私のサプリメントは安定性を高めるはずです。
指示、便利なコマンドなど
RPiの設定に関するかなり多くの詳細をこの記事でカットしました。私のブログでは、構成手順のいくつかについてもう少し話をしました。
さらに、ここでは、継続できなかったアイデアの一部を切り取りました。トピックの唯一の4の注意事項:1、2、3、4。
Raspberry PiのCaffeバージョンは、ここからドラッグされています。
インストールの説明はほとんどありません。あなたは私のブログで読むことができ、最も近いガイドに基づいて行動することができます(hdf5で作品をスキップします)。RPiでOpenCV
を起動するためのガイド。有用な指導
Telegramでボットを作成します。一般的に、私は彼に関するほとんどのサンプルをここから取りました。優れたリポジトリ(Python API)。
Z.Yu。
突然誰かが自分の鳥を認識したい場合、RPIがありますが、データのグリッドをトレーニングするための展開されたコンピューターはありません。指定された形式でマークアップされたデータベースを送信します。私は自分自身を追加して再トレーニングし、パブリックドメインに投稿します。
Z.Yu.Yu.
私は今日、鳥が飛ぶことも壊れることもないことを非常に恐れていました。記事を投稿しましたが、空です。しかし、喜んで1人がまだ飛び立った。たぶんもっとあるでしょう。
