今日、空中および地上ベースの無人航空機の新興産業には、信頼性の高い高精度の位置決めが必要です。 モバイルアプリケーションには、より高い位置決め精度も必要です。 これらの資金は、小型で低消費で安価でなければなりません。 今日まで、これらの新しい要件と製品の機能と価格の間にはギャップがありました。 ナビゲーション業界の巨人は、必要な特性を備えた製品を望んでいないか、提供できませんでした。
現在、状況は急速に変化し始めています。
大まかに言うと、センチメートル単位の正確な位置決めは高精度と呼ばれます。 この問題は、ローカルゾーンで解決できます。つまり、一部のベースステーションに依存するか、依存せずに、つまりグローバルスケールで解決できます。 これらの各タスクは、リアルタイムまたは記録によって、つまり遅延モードで解決できます。 正確さへの道で克服される主な問題、物理的な問題は、 電離層内の電磁波の遅延の不安定性です。 2メートルに達する電離層誤差を補正するために、 異なる周波数での衛星信号の同時受信、または単一周波数での受信時の基地局からの補正のいずれかを使用します。 デュアル周波数受信機の主な利点は、基地局のネットワークが必要ないことです。 テクノロジーをミックスすることは当然可能です。たとえば、基地局からの補正を使用する2周波数システムでは、2周波数を使用してナビゲーションソリューションの収束を加速し、衛星信号の可用性を変更する際の信頼性を高めます。
マルチ周波数およびマルチシステムを含む高精度受信機のハードウェアは数十年にわたって実践されており、そのコストは低いです。 現在のマーケットリーダーのデュアル周波数レシーバーである大きなキロバックは、主に使用済みソフトウェア用に取得されます。
高精度機器の主な複雑さはソフトウェアプレーンにあるという事実にもかかわらず、すべてはハードウェアの単純化から始まりました。 NTLab Minsk社は、マルチシステムマルチ周波数無線受信機であるNT1065マイクロチップを開発し、量産を開始しました。 大まかに言えば、このことは、1つまたは複数のアンテナ(最大4つ)からの信号をデジタル読み取り値に変換します。 衛星航法システムの既存および計画中のすべての周波数範囲を網羅しています。 これらのシステムと頻度はここで詳細にリストされます 。
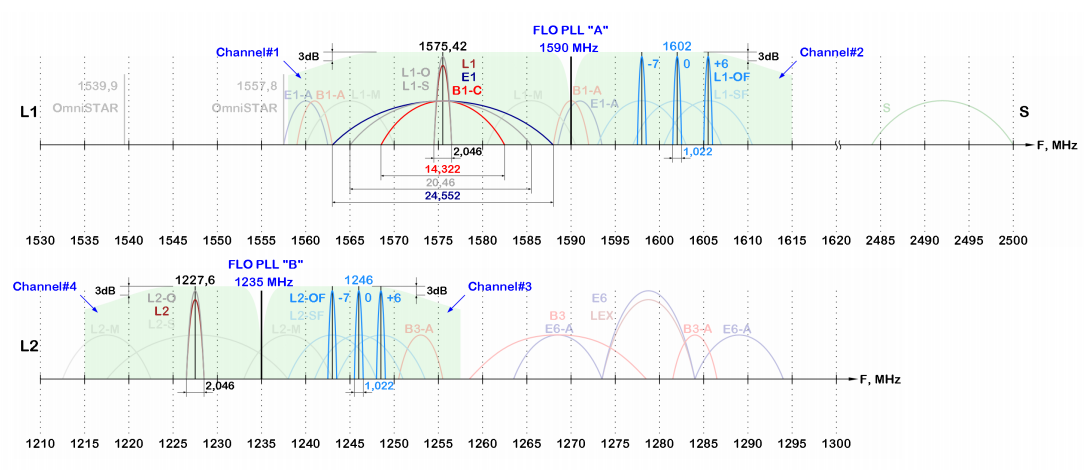
周波数計画NT1065のバリアント
高精度位置決めのための新しいツールの例についての入門部分の後、NT1065でデバイスを設計した経験についてお話します。
さまざまな企業に関するこの部分は退屈に思えるかもしれません。 注意、写真はありません。
いつものように、最初の新興企業がこの冒険に参加しました。 誰が正確にこれら2つの最初の人であったかはわかりません。私は彼らの発表に気づいた順に名前を付けます。 1つ目は、新興企業のSwift Navigationですが、すでにかなり成長しています。 彼女は、Kickstarterでオープンソースの単一周波数RTKデバイスを使用して開始したRTKソリューション(RTKは基地局を使用した高精度のリアルタイムポジショニングシステム)に従事しています。 今日、彼らはL1およびL2範囲で動作し、わずか595ドルでセンチメートルの精度を提供するPiksi Multiデバイスを提供しています。 2,000ドル未満で、RTKアンテナと修正を送信するための通信システムを備えた2セットを使用できます。 これは市場の巨人にとって非常に心配なことだと思います。
2番目の会社はTersus GNSSです。 レシーバーボードはSwift Navigationボードと同じように見え、同じFPGA Zyncが表示されます。 アンテナと通信システムを備えたキットもあります。 ここでは、機器が無人のトラクターとヘリコプターに提供する新しい機能のよりカラフルな説明を示します。 高精度ゴニオメトリック受信機を構築するための2つのアンテナを備えた受信機オプションがあります。 このような受信機は、車両の実際の進路を正確に計算しますが、これは必ずしも必要ではありませんが、他の手段で計算することは非常に困難です。
したがって、これらの2つの企業は、業界の巨人たちのパイをゆっくりと食い尽くし、その栄光に身を任せています。 両社はテクノロジーに使用されている無線チップを開示しておらず、巨大市場への急速な参入を可能にしましたが、デバイスの大きさから、これがNT1065であることが理解できます。
数か月後、業界の巨人は、すでに何か革新的なものを開発しているのであれば、それをすべて発表する時が来たことに気付きました。そうでなければ、誰もが自分が未知の方向に去ったと考え始め、自分のサイトを見ることをやめるでしょう。
TrimbleはCatalystを発表しました。 彼らはすぐに革命的なプロセスの本質を把握しました-鉄の利益の機会はますます少なくなります。 したがって、彼らは測位精度をサービス、サービスにしました。 ユーザーが350ドルで鉄片を購入し、必要に応じて月額料金を支払うだけで十分です。 1か月から40ドルのメーター精度から350センチメートルまで。さらに、鉄片にはすでにアンテナが含まれており、USBを介してモバイルデバイスに直接接続します。 伝えられるところでは、鉄片はデジタル化された信号のみを送信し、スマートフォンまたはタブレットはソフトウェア受信機(SDR-ソフトウェア定義受信機)を実行します。 彼らがこれをどのように行うかは不明であり、大型コンピュータがナビゲーションSDRからシャットダウンします。 彼らは彼らのソフトウェアが動作するはずのいくつかの特別なモバイルデバイスについて書いています。 GPUの専門家の1人は、モバイルデバイスでOpenCLを使用できると述べました(多くの情報は見つかりませんでした。ご存知の方は、共有してください)。 しかし、これは本当の革命です! 彼らは最初ではありませんが、そのようなことで最初の2つよりもはるかに多くのチャンスを得ることができます。
トリンブルはおそらく無線マイクロ回路用の独自のソリューションを持っていますが、NT1065をインストールする方がより有益であった可能性は十分にあります。 計算するお金はありますが、そのようなRPUを大まかに作る方が安くなることがわかります。 しかし、怠lazは進歩の原動力です。 チップが登場するまで、すべてが静止していました。チップをカートに入れるのは非常に簡単です。
2番目の会社はTersus GNSSです。 レシーバーボードはSwift Navigationボードと同じように見え、同じFPGA Zyncが表示されます。 アンテナと通信システムを備えたキットもあります。 ここでは、機器が無人のトラクターとヘリコプターに提供する新しい機能のよりカラフルな説明を示します。 高精度ゴニオメトリック受信機を構築するための2つのアンテナを備えた受信機オプションがあります。 このような受信機は、車両の実際の進路を正確に計算しますが、これは必ずしも必要ではありませんが、他の手段で計算することは非常に困難です。
したがって、これらの2つの企業は、業界の巨人たちのパイをゆっくりと食い尽くし、その栄光に身を任せています。 両社はテクノロジーに使用されている無線チップを開示しておらず、巨大市場への急速な参入を可能にしましたが、デバイスの大きさから、これがNT1065であることが理解できます。
数か月後、業界の巨人は、すでに何か革新的なものを開発しているのであれば、それをすべて発表する時が来たことに気付きました。そうでなければ、誰もが自分が未知の方向に去ったと考え始め、自分のサイトを見ることをやめるでしょう。
TrimbleはCatalystを発表しました。 彼らはすぐに革命的なプロセスの本質を把握しました-鉄の利益の機会はますます少なくなります。 したがって、彼らは測位精度をサービス、サービスにしました。 ユーザーが350ドルで鉄片を購入し、必要に応じて月額料金を支払うだけで十分です。 1か月から40ドルのメーター精度から350センチメートルまで。さらに、鉄片にはすでにアンテナが含まれており、USBを介してモバイルデバイスに直接接続します。 伝えられるところでは、鉄片はデジタル化された信号のみを送信し、スマートフォンまたはタブレットはソフトウェア受信機(SDR-ソフトウェア定義受信機)を実行します。 彼らがこれをどのように行うかは不明であり、大型コンピュータがナビゲーションSDRからシャットダウンします。 彼らは彼らのソフトウェアが動作するはずのいくつかの特別なモバイルデバイスについて書いています。 GPUの専門家の1人は、モバイルデバイスでOpenCLを使用できると述べました(多くの情報は見つかりませんでした。ご存知の方は、共有してください)。 しかし、これは本当の革命です! 彼らは最初ではありませんが、そのようなことで最初の2つよりもはるかに多くのチャンスを得ることができます。
トリンブルはおそらく無線マイクロ回路用の独自のソリューションを持っていますが、NT1065をインストールする方がより有益であった可能性は十分にあります。 計算するお金はありますが、そのようなRPUを大まかに作る方が安くなることがわかります。 しかし、怠lazは進歩の原動力です。 チップが登場するまで、すべてが静止していました。チップをカートに入れるのは非常に簡単です。
革命の主要な武器の製造に進みます。 主な成分は2つです-
どのような獣-NT1065を検討してください。 開発者は、そのようなことで自分にとってどのような地平を見つけますか? 学ぶのは簡単ですか?
一般的に、これはそのようなことです:
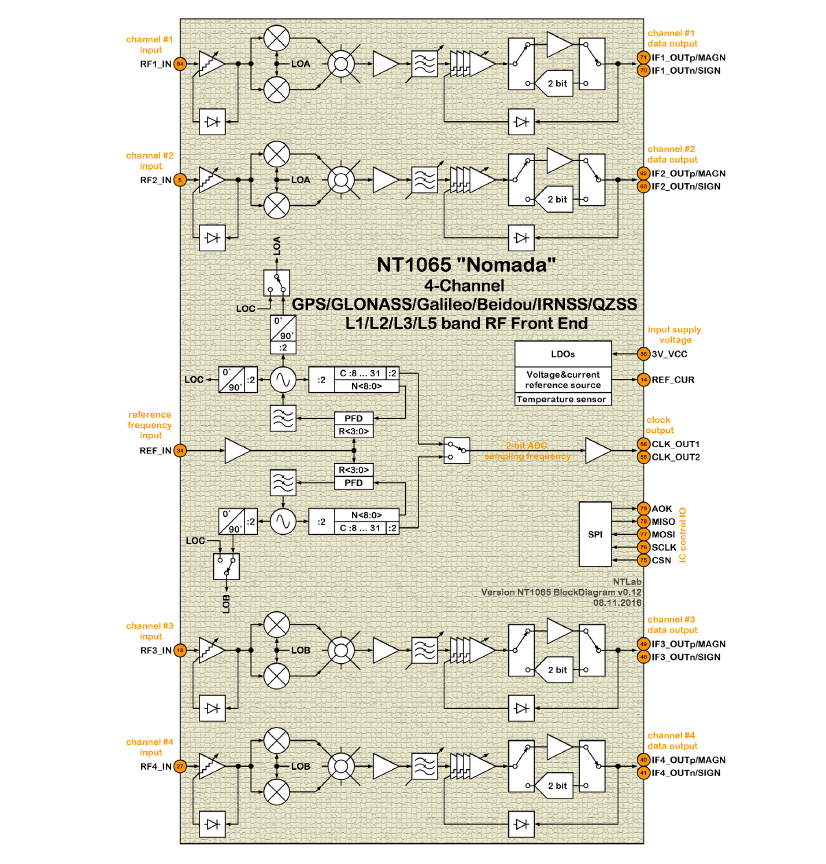
個別の入力を備えた4つの受信チャンネルと、チャンネルミキサーを柔軟に録音できる2つのローカルオシレーター。 デジタルおよびアナログ形式で信号を出力できます。 したがって、各チャネルの独自の信号へのチューニング(いくつかの制限付き)と、間隔を空けたアンテナまたはアンテナアレイへの1つの信号の同期受信の両方を実装することができます。
それでは、詳細を見ていきましょう。 一見したところ、奇妙なことに電源が作られています-マイクロ回路の片足だけです。 しかし、この奇妙さを配線すると、カボチャの利点に変わりました。 これらの人はデータシートで4つのレイヤーを推奨していますが、私は簡単に2つのレイヤーに適合します! 多かれ少なかれ脚の付いたブルジョアチップでは、これはうまくいきませんでした。
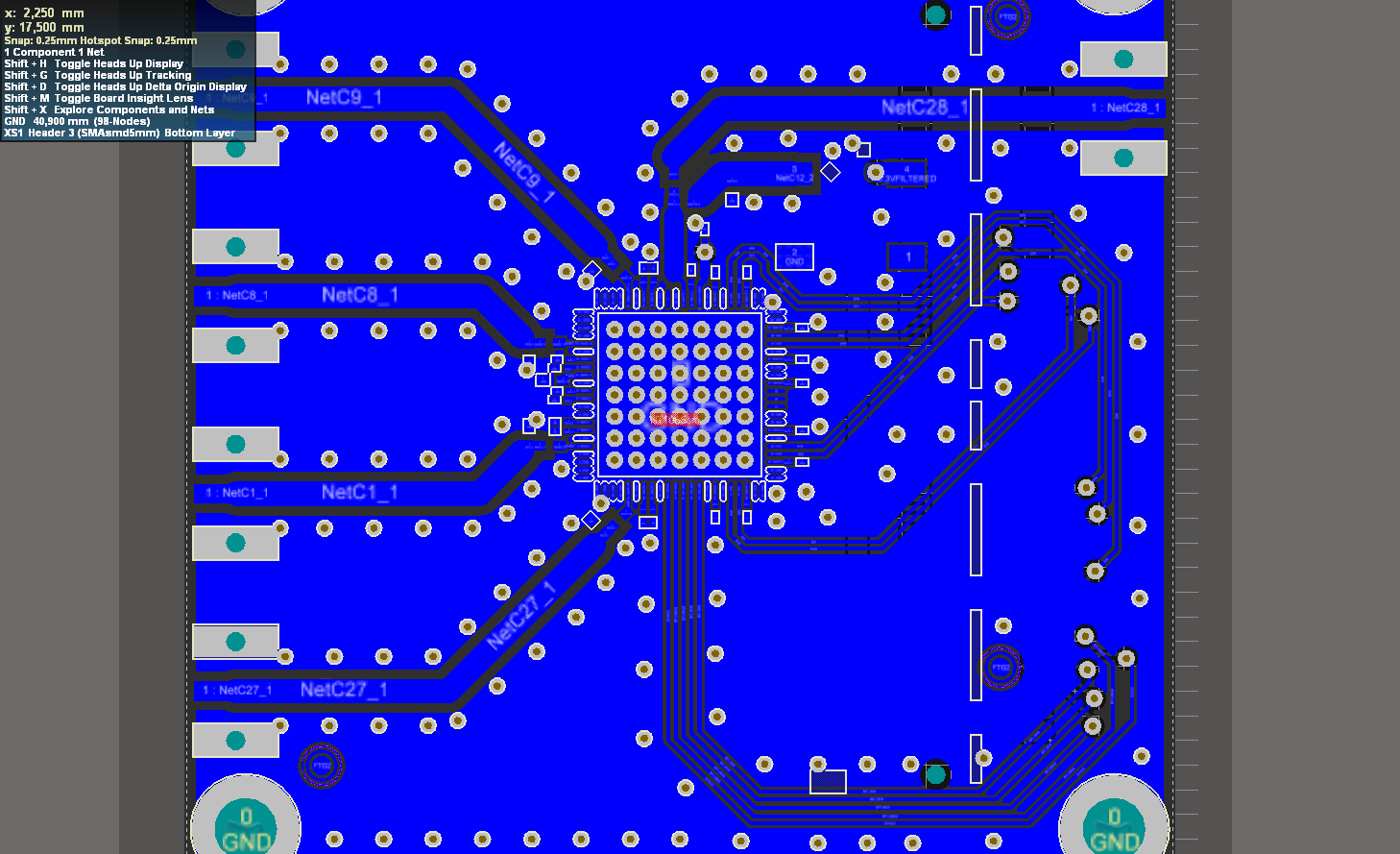
さらに、データシートでは、過渡減衰が大きくなるように各チャネルのランドを分割することを推奨しています。 私はほとんど自分自身を殺し、そのような選択肢を作りましたが、チャンネルの隔離の大幅な増加は見られませんでした。 測定が間違っているか、間違っていました。 一般的に、善の最高の敵。
したがって、電力は2.8〜3.3ボルトで、電流は最大100 mAです。 確かに、低ノイズの電源を選択する必要があります。 DCDCはここでは適していません。 リファレンスジェネレーターは、周波数安定性が良好で温度補償された低ノイズも必要です。 標準設定は、10 MHzおよび24.84 MHzをサポートします。 opornikの異なる公称周波数を使用するには、開発者に連絡する必要があります。
出力インターフェイスも非常にシンプルです-クロックとデータ。 各チャネルには2つのADC放電(サインとマグニチュード)しかなく、短期間(私は前回の仕事で16のカテゴリに慣れていました)状態になりましたが、これで十分であることがわかりました。 ただし、サンプリングレートは最大100 MHzです。 CYUSB3014コントローラーのGPIFIIインターフェイスのクロック入力でクロックサイクルを開始し、データ入力でデータを開始します。 また、SPIを制御して、データシートのガイダンスの下で、RPUの入力でのインピーダンスの配線と調整を行い、ガンの準備を慎重に行う必要があります。

NTLabには、このようなボードの完全なスキームがサイトにあります。
ソフトウェアを使用すると、任意のOSでサイプレスFX3からのストリームを簡単に受け入れることができます。WindowsとLinuxの両方でlibusbを使用できます。 Windowsでは、サイプレスのネイティブドライバを使用することもできます-違いはありません。
現時点では、一連のソフトウェアがあります(GitHubに投稿され、NT1065という単語で検索します)。
主なツールはいくつかのプログラムです。 そのうちの1つはチップからディスクへの連続信号を確実に記録でき、2つ目は診断とデモンストレーションに適しています。
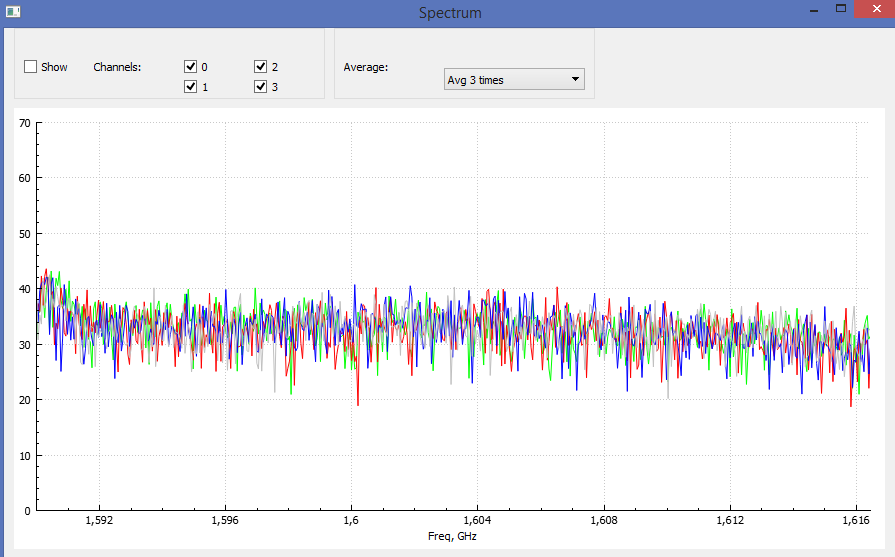
入力信号のスペクトルを見ることができます(ジェネレーターから信号を送信できます)。
簡単な方法でアンテナを接続すると、衛星信号を検出できます。
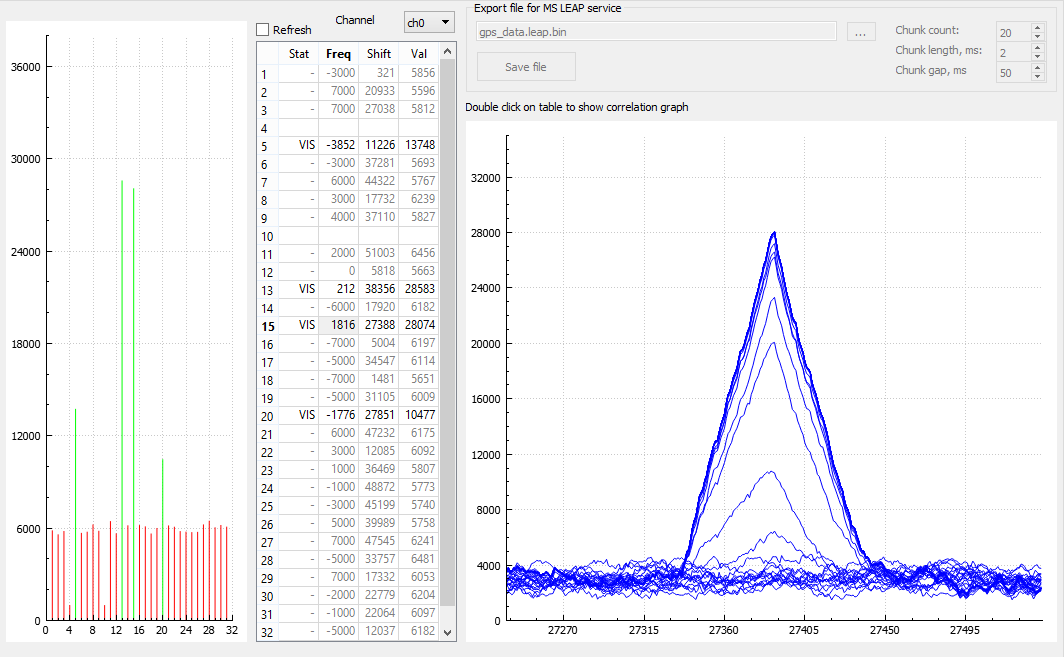
そして、GPSだけでなく、L1の周波数のGLONASSも。 そして、L2の周波数のGLONASSでさえもです! アメリカ人とは異なり、私たちは標準精度のオープンソースコードをL2にも送信します。
そのため、プログラムから直接GPS / GLONASS L1 / L2を選択して相関関係を確認できます-先日作成しますが、30分ほどで問題が解決します(各ケースでペンでコードを修正します)。
現在、Androidバージョンに取り組んでいます。
現在、世界を征服する能力は、衛星航法用の革新的なデバイスを思い付き実装する能力によってのみ制限されています!
PS
この記事は、ナビゲーション受信機との干渉に対処するために使用される手段を検討するという意味で、 前の記事の続きです。Habréですぐに書きたいと思います。
個人的に不明瞭なのは、Trimbleが携帯電話でどのようにナビゲーションSDRを実行するかということです。 最初は信じられないと思いましたが、その後、モバイルデバイスの最新の計算機の性能を示すサインを送ってきました。 したがって、モバイルデバイス向けのOpenCLのような技術について人々に尋ねたいと思います。 それらを使用した人はいますか? オウムの理論的性能を見つけましたが、たとえばFFTなどのタスクでモバイルGPUのテストはありますか?
申し訳ありませんが、TrimbleとOpenCLについての前の段落は明確ではないかもしれません。Trimbleについてのテキストはスポイラーの下で可能な限り退屈だからです。 興味がある人は、上記を読んでください。
まあ、ポスターは非常に攻撃的であり、タイトルに示されているロシアの歴史の期間に正確に対応していません。 赤い言葉で何ができませんか?