この記事では、Assassin's Creed Syndicateで列車の物理をシミュレートするために作成された独自のシミュレータについてお話したいと思います。 このゲームは、社会の発展が蒸気と鉄鋼に依存していた産業革命の時代の1868年にロンドンで行われました。 ロンドンのビクトリア朝の世界を実現するユニークな機会に取り組むことは、私にとって大きな喜びでした。 歴史的および実際の詳細に注意を払って、この物理シミュレーションを作成しました。
はじめに
現在、独自の物理エンジンの作成はあまり人気がありません。 ただし、独自の物理シミュレータをゼロから作成することが非常に役立つ場合があります。 このような状況は、新しいゲームプレイ機能またはシミュレートされたゲーム世界の一部が特別に必要な場合に発生する可能性があります。 これはまさに、19世紀ロンドンの鉄道システムと列車制御の開発で生じた問題です。
ヨーロッパの列車を接続するための標準システムを図に示します。 あと1つ。 同じシステムがロンドンの19世紀の列車で使用されていました[1]。 列車の作業を始めたとき、スクリードを物理的にシミュレートすることで、興味深い相互作用と依存関係を作成できることにすぐに気付きました。 そのため、ワゴンをしっかりと固定する代わりに、列車のすべてのワゴンの動きを制御する可動カップリング装置でそれらを接続しました。
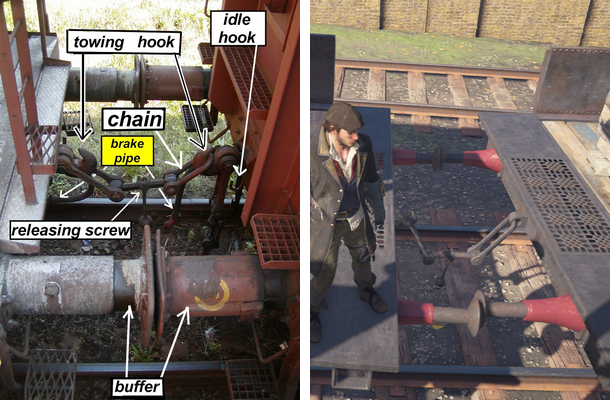
図 1.左側には、ネクタイの詳細があります(ソース:ウィキペディア[1])。 右側には、アサシンクリードシンジケートの結合システムがあります。
この場合、物理シミュレーションにはいくつかの利点があります。
- 鉄道線路の巻き取りは、1Dシミュレータを使用すると簡単に制御できます。 1次元空間でモーションコントロールリミッターを使用するように3D物理学を強制的に挿入することは、かなり危険な決定です。 発生する不安定性に非常に敏感である可能性があり、そのために車が空中に飛びます。 ただし、完全な3D空間での車の衝突を認識する必要がありました。
- 移動可能な接続により、ゲームプレイ設計の自由度が高まります。 現実の世界と比較して、車の間にははるかに長い距離が必要です。 これは、プレーヤーとカメラのさまざまなアクションを実行する(たとえば、車の屋根に登る)より多くのスペースを確保するために必要です。 さらに、自動車間の相対的な動きをより自由にするために、当社のカプラーは実際の世界よりもはるかに少ない剛性で接続されています。 これにより、鉄道の急な曲がり角に簡単に対応でき、車同士の衝突を認識することで相互侵入を防ぐことができます。
- 私たちのシステムのおかげで、ワゴンの連結解除(摩擦力を考慮に入れて)および連結解除されたワゴンと列車の残りの部分との衝突の計算を実行できます(たとえば、連結解除された車が移動し続け、その結果、列車に衝突した場合、列車が突然停止する場合)。
これが私たちの物理学の仕事の例のビデオです:
まず、列車の制御方法を説明するセクションから始めます。
注:説明を簡単にするために、「トラクター」という用語を機関車に近いワゴン、「トレーラー」という用語を列車の尾部に近いワゴンと指定します。
機関車制御
機関車を制御するために、必要な速度のリクエストのみで構成される非常にシンプルなインターフェイスを作成しました。
Locomotive::SetDesiredSpeed(float DesiredSpeed, float TimeToReachDesiredSpeed)
鉄道システム管理者は、ゲーム内を移動する各列車にこのようなリクエストを送信します。 要求を満たすために、必要な加速を作成するために必要な力を計算します。 次の式を使用します(ニュートンの第二法則):

ここで、 Fは計算された力、 mは機関車の質量、
 (目的の速度は現在の速度です)、 t = TimeToReachDesiredSpeed(目的の速度に達するまでの時間) 。
(目的の速度は現在の速度です)、 t = TimeToReachDesiredSpeed(目的の速度に達するまでの時間) 。
力を計算した後、それを「エンジン出力」としてWagonPhysicsStateに転送して、機関車を動かします(これについては次のセクションで詳しく説明します)。
列車の物理的挙動は、たとえば車の数に依存する可能性があるため(衝突する車は連鎖反応を起こし、列車を前進させます)、速度の要求が完全に満たされるようにする方法が必要です。 これを達成するために、2秒ごとに必要な速度を達成するために必要な速度を再計算します。 したがって、提出されたリクエストが結果として満たされることを保証します。 ただし、このため、 TimeToReachDesiredSpeedの値と正確に一致させることはできません。 ただし、ゲーム内でのわずかな一時的な逸脱は許容されます。
さらに、 SetDesiredSpeedリクエストで指定された機関車の速度を維持するために、ジャンクションリミッターで機関車の速度を変更することはできません。 リミッターからのこのようなインパルスの欠如を補うために、牽引力をモデル化するための特別な方法を作成しました(詳細については、「列車の始動」セクションを参照してください)。 そして最後に、列車が速度ゼロまで減速しない限り、衝突に対する反応が機関車の速度を変えることを許可しません。
次のセクションでは、物理シミュレーションの基本レベルについて説明します。
基本的なシミュレーション手順
各ワゴン(および機関車)に関する物理情報を格納するために使用される構造は次のとおりです。
struct WagonPhysicsState { // , : // . RailwayTrack m_Track; float m_LinearMomentum; // , . float m_LinearSpeed; // . float m_EngineForce; float m_FrictionForce; // , . Vector m_WorldPosition; Quaternion m_WorldRotation; // : float m_Mass; }
ご覧のとおり、角速度はありません。 3Dコライダーを使用して車同士の衝突をチェックしても(そして、ターンは常に線路の方向に対応します)、列車は鉄道線路に沿って1次元の世界を動きます。 したがって、物理学は角運動に関する情報を保存する必要はありません。 さらに、シミュレーションは1次元であるため、物理量(力、運動量、速度)を保存するには、float変数で十分です。
各車について、基本シミュレーションのステップとして、オイラー法[2]を使用します( dtはシミュレーションの1ステップの時間です)。
void WagonPhysicsState::BasicSimulationStep(float dt) { // . float dPosition = m_LinearSpeed; float dLinearMomentum = m_EngineForce + m_FrictionForce; // . m_LinearMomentum += dLinearMomentum*dt; m_LinearSpeed = m_LinearMomentum / m_Mass; // . float DistanceToTravelDuringThisStep = dPosition*dt; m_Track.MoveAlongSpline( DistanceToTravelDuringThisStep ); // . m_WorldPosition = m_Track.GetCurrentWorldPosition(); m_WorldRotation = m_Track.AlignToSpline(); }
BasicSimulationStepを実装するには、3つの基本式を使用します。 これらの方程式は、速度が位置の導関数であり、力がインパルスの導関数であることを示しています(記号の上の点は時間の導関数を示します)[2-4]。


3番目の方程式では、運動量Pが決定されます。これは、質量と速度の積です。

私たちの実装では、車にインパルスを適用することは、現在のインパルスを使用した単純な加算操作です。
void WagonPhysicsState::ApplyImpulse(float AmountOfImpulse) { m_LinearMomentum += AmountOfImpulse; m_LinearSpeed = m_LinearMomentum / m_Mass; }
ご覧のとおり、勢いを変更した直後に、この値にアクセスしやすいように速度を再計算します。 これは、[2]と同じ方法で行われます。
これで、経時的な変化を計算する基本的な方法ができたので、アルゴリズムの他の部分に進むことができます。
1つの列車に対する高レベルのシミュレーションステップ
1つの列車の完全なシミュレーションステップの擬似コードは次のとおりです。
// // ApplyDeferredImpulses ( ) // UpdateCouplingChainConstraint ( ) // UpdateEngineAndFrictionForces ( ) SimulationStepWithFindCollision ( ) CollisionResponse ( )
擬似コードで記述されているように、各パーツは1つの列車のすべての貨車に対して順番に実行されることに言及することが重要です。 パートAは、列車の発進に関連する特別な動作を実装します。 パートBでは、衝突中に得られたインパルスが適用されます。 パートBは、カプラーの解法アルゴリズムであり、カプラーの最大距離を超えないようにします。 パートDは、エンジンと摩擦の力、基本シミュレーションのステップ(統合)、および衝突の処理を担当します。
シミュレーションアルゴリズムでは、電車の同じ更新順序が常に保持されます。 機関車から始めて、列車のすべての車を最初から最後まで順番に通過します。 このプロパティはシミュレータで使用できるため、計算の定式化が簡単になります。 この機能は、衝突に接触する場合、各車の動きを順番にシミュレートする場合、および隣接する1台の車との衝突を確認する場合にのみ使用します。
この高レベルのシミュレーションサイクルの各部分については、次のセクションで詳しく説明します。 パートDの特別な重要性のため、それとSimulationStepWithFindCollisionから始めます。
衝突シミュレーション
SimulationStepWithFindCollision関数のコードは次のとおりです。
WagonPhysicsState SimulationStepWithFindCollision(WagonPhysicsState InitialState, float dt) { WagonPhysicsState NewState = InitialState; NewState.BasicSimulationStep( dt ); bool IsCollision = IsCollisionWithWagonAheadOrBehind( NewState ); if (!IsCollision) { return NewState; } return FindCollision(InitialState, dt); }
最初に、時間を完全に変更してテストシミュレーションステップを実行します。
NewState.BasicSimulationStep( dt );
新しい状態で衝突が検出されたかどうかを確認します。
bool IsCollision = IsCollisionWithWagonAheadOrBehind( NewState );
このメソッドがfalseを返す場合、計算された新しい状態を直接使用できます。 ただし、衝突が検出された場合は、 FindCollisionを実行して、衝突イベントの直前に物理学のより正確な時間と状態を見つけます。 このタスクを達成するために、[2]で使用されているものと同様のバイナリ検索を使用します。
より正確な衝突時間と物理状態を見つけるためのループは次のとおりです。
WagonPhysicsState FindCollision(WagonPhysicsState CurrentPhysicsState, float TimeToSimulate) { WagonPhysicsState Result = CurrentPhysicsState; float MinTime = 0.0f; float MaxTime = TimeToSimulate; for (int step = 0 ; step<MAX_STEPS ; ++step) { float TestedTime = (MinTime + MaxTime) * 0.5f; WagonPhysicsState TestedPhysicsState = CurrentPhysicsState; TestedPhysicsState.BasicSimulationStep(TestedTime); if (IsCollisionWithWagonAheadOrBehind(TestedPhysicsState)) { MaxTime = TestedTime; } else { MinTime = TestedTime; Result = TestedPhysicsState; } } return Result; }
反復するたびに、衝突の正確な時間に近づきます。 また、衝突をチェックする必要があるのは、現在のキャリッジの直前(または後方に移動する場合は後方)にあるキャリッジ1つのみとする必要があることもわかっています。 結果を計算するために、 IsCollisionWithWagonAheadOrBehindメソッドは、2つの指向バウンディングボックス(OBB)間の衝突チェックを使用します。 WagonPhysicsStateのm_WorldPositionおよびm_WorldRotationを使用して、完全な3D空間で衝突をチェックします。
衝突反応
衝突イベントの直前に物理状態を受け取った後、対応するジェットの運動量jを計算して、トラクター(トラクター)とトレーラー(トレーラー)の両方に適用する必要があります。 衝突前の車間の現在の相対速度を計算することから始めます。

相対速度の同様の値
 衝突イベント後:
衝突イベント後:

どこで
 そして
そして  -衝突jへの反動のインパルスの適用後の速度。 これらの速度は、衝突前の速度と運動量jを使用して次のように計算できます(
-衝突jへの反動のインパルスの適用後の速度。 これらの速度は、衝突前の速度と運動量jを使用して次のように計算できます(  そして
そして  車の塊です):
車の塊です):


これで、弾性回復係数rを決定する準備ができました。

弾性回復係数は、衝突に対する反応の「弾性」を決定します。 r = 0の値はエネルギーの完全な損失を意味し、 r = 1の値はエネルギーの損失がないことを意味します(絶対弾性)。 この式を前の式に代入すると、次のようになります


運動量jを得るためにこの方程式を順序付けます:


最後に、運動量jを計算できます。


ゲームでは、弾性回復係数r = 0.35を使用します。
インパルス+ jをトラクターに、インパルス-jをトレーラーに適用します。 ただし、トラクターには「遅延」パルスを使用します。 トラクターの統合は既に完了しており、現在の速度を変更したくないため、パルスをシミュレーションの次のフレームに延期します。 視覚的には、1つのフレームの違いがほとんど見えないため、これはあまり目立ちません。 このような「遅延」インパルスは自動車用に保存され、次のシミュレーションフレームのパートBに適用されます。
列車の停留所の例を含むビデオ:
接続スクリード(チェーン)
接続スクリードを車間の距離のリミッターとして使用できます。 この距離リミッターの要件を満たすために、適切なパルスを計算して適用し、速度を変更します。
次のシミュレーションステップの距離方程式から計算を開始します。 カプラーで接続された2台の車ごとに、次のシミュレーションステップでカバーする距離を計算します。 現在の速度を使用して(および積分方程式を調べることで)この距離を非常に簡単に計算できます。

ここで、 xは距離、 Vは現在の速度、 tはシミュレーションのステップ時間です。
次に、式を計算します。

ここで:
 -次のシミュレーションステップでトラクターがカバーする距離。
-次のシミュレーションステップでトラクターがカバーする距離。
 -シミュレーションの次のステップでトレーラーがカバーする距離。
-シミュレーションの次のステップでトレーラーがカバーする距離。
FutureChainLengthがタイの最大長よりも大きい場合、次のシミュレーションステップの距離リミッターが壊れます。 仮定する

距離制限が壊れている場合、 dの値は正になります。 この場合、距離リミッターの条件を満たすために、 d = 0のようなパルスを適用する必要があります。 必要なパルスのスケールを確立するには、車の質量を使用します。 軽いワゴンはより多く移動し、重いワゴンはより少なく移動する必要があります。 次の係数を割り当てます
 そして
そして 


に注意してください
 。 シミュレーションの次のステップで余分な距離を移動するトレーラーが必要です
。 シミュレーションの次のステップで余分な距離を移動するトレーラーが必要です  距離のあるトラクター
距離のあるトラクター  。 インパルスを適用してこれを達成するには、与えられた距離に、質量をシミュレーションステップの時間で割った値を掛ける必要があります。
。 インパルスを適用してこれを達成するには、与えられた距離に、質量をシミュレーションステップの時間で割った値を掛ける必要があります。


次の追加の係数Cを使用する場合

次に、パルスの式を単純化して


大きさは同じですが、記号が異なることに気づくかもしれません。
両方のパルスを印加した後、そのような接続カプラーで接続された車は、次のシミュレーションステップで距離制限を解除しません。 これらのインパルスは、積分式の結果として、スクリードの最大距離の条件を満たす位置が取得されるように速度を変更します。
ただし、1つの接続カプラーのこれらのインパルスを計算した後でも、列車内の他の車両の最大カプラー距離を超える可能性があります。 最終的な結果を減らすために、このメソッドを数回実行する必要があります。 ただし、実際には1サイクルで十分であることがわかりました。 満足できる全体的な結果を得るには十分です。
これらの計算は、機関車から始めて、列車内の接続カプラーごとに順番に実行されます。 カプラーで接続された両方の車に常にインパルスを適用します。 ただし、このルールには1つの例外があります。機関車に勢いをかけることはありません。 速度を維持するために機関車が必要なので、インパルスは機関車の後の最初の車にのみ適用されます。 このインパルスはトレーラにのみ適用され、必要な距離d全体の補償が必要です(この場合、
 、
、  そして
そして  )
)
急カーブの修正
シミュレーションは1次元の線に沿って実行されるため、車が急旋回するときにフックの接続タイが完全に一致するという問題があります。 この状況では、1Dの世界はゲームの3Dの世界と交差します。 カプラーは3Dの世界にありますが、パルス(距離リミッターの条件を満たすための補償)は、単純化された1Dの世界でのみ適用されます。 フック上のカプラーの最終位置の決定を修正するために、トラクターとカプラーの方向の間の相対角度に応じてMaximumLengthOfCouplingChainをわずかに変更します。 角度が大きいほど、スクリードの最大長は短くなります。 最初に、2つの正規化されたベクトルのスカラー積を計算します。

どこで
 -接続スクリードの正規化された方向、および
-接続スクリードの正規化された方向、および  -トラクターの前方方向のベクトル。 次に、次の式を使用して、接続スクリードの物理的な長さから差し引く必要がある距離を最終的に計算します。
-トラクターの前方方向のベクトル。 次に、次の式を使用して、接続スクリードの物理的な長さから差し引く必要がある距離を最終的に計算します。
float DistanceConvertedFromCosAngle = 2.0f*clamp( (1.0fs)-0.001f, 0.0f, 1.0f ); float DistanceSubtract = clamp( DistanceConvertedFromCosAngle, 0.0f, 0.9f );
ご覧のとおり、角度の正確な値を計算するのではなく、コサインを直接使用します。 これにより、計算時間が少し節約され、ニーズに十分対応できます。 経験的なテストに基づいて追加の数値を使用して、許容範囲内で値を制限することもできます。 最後に、 DistanceSubtract値を使用して、タイロッドの長さ制限の条件を満たします。
MaximumLengthOfCouplingChain = ChainPhysicalLength - DistanceSubtract;
実際には、これらの式は非常にうまく機能することが判明しました。 これにより、トラックルートが急に曲がった場合でも、タイストラップがフックに正しく掛けられます。
次に、特別なケース-列車の発進について考えます。
列車の始発
前に述べたように、接続カプラーのインパルスが機関車の速度を変更することは許可しません。 ただし、特に電車の発進時には、トラクションの影響をシミュレートする方法が必要です。 機関車が始動すると、他の車を引っ張り始めますが、車の質量に応じて機関車自体も減速する必要があります。 これを実現するために、列車がゼロ速度で加速するときに速度を変更します。 バランスの運動量の法則に基づいた計算から始めます。 この法則は、「外力がシステムに作用しない場合、システムの勢いは一定である」と述べています[3]。 これは、この場合、勢いが
 別の車をけん引する前に、それは勢いに等しくなければなりません
別の車をけん引する前に、それは勢いに等しくなければなりません  接続スクリードが別の車を引っ張った直後:
接続スクリードが別の車を引っ張った直後:


この場合、これを次の式に展開できます。

どこで
 -i番目のキャリッジの質量(
-i番目のキャリッジの質量(  -機関車の質量)、
-機関車の質量)、  -機関車の現在の速度(すでに動いているすべての車が機関車と同じ速度であると認めます)、
-機関車の現在の速度(すでに動いているすべての車が機関車と同じ速度であると認めます)、  -けん引後のシステムの速度(すべてのけん引車が同じ速度を持っていると仮定します)。 追加表記を使用する場合
-けん引後のシステムの速度(すべてのけん引車が同じ速度を持っていると仮定します)。 追加表記を使用する場合  として定義される
として定義される

次のように式を単純化できます
 私たちが探している価値は:
私たちが探している価値は:

この式を使用すると、単に新しい速度を設定できます
機関車と、現在接続カプラーによって引っ張られているすべての車(2〜n)の場合。
図 図2は、機関車が
2台の車が3台目の車を引っ張り始めます  :
:

図 2.列車を開始します。
これが列車の出発のビデオです:
摩擦
摩擦力( WagonPhysicsStateのm_FrictionForce変数)を計算するには、一連の実験後に選択され、ゲームプレイに最も適した式と値が使用されます。 摩擦力の値は一定ですが、現在の速度に応じてさらにスケーリングします(速度が4未満の場合)。 ゲーム内の車の標準摩擦力のグラフは次のとおりです。

図 3.ワゴンの標準摩擦力。
切断されたワゴンの場合、他の値が使用されます:

図 4.切断されたワゴンの摩擦力。
さらに、切断した後短時間、プレイヤーがワゴンからワゴンに簡単にジャンプできる機会を提供したいと考えました。 そのため、より低い摩擦値を使用し、自動車が切断されてからの経過時間に比例してスケーリングしました。 切断された車の摩擦の最終値は次のように設定されます。

ここで、 tは、切断イベント後の経過時間(秒単位)です。
ご覧のとおり、最初の3秒間は摩擦を使用せず、徐々に増加させます。
最新のメモ
ゲームトレインでは、車の前後に可動バンパーを追加しました。 これらのバンパーは、体力を生み出しません。 追加の視覚要素としてそれらの動作を実装しました。 それらは、別の車の隣接するバンパーの検出された変位に従って移動します。
さらに、ご覧のとおり、シミュレータでは異なる列車間の衝突をチェックしません。 鉄道システム管理者は、衝突を避けるために列車の速度を調整する責任があります。 シミュレーションでは、衝突は1つの列車の貨車間でのみチェックされます。
ゲームサウンドと特殊効果は、列車の知覚において非常に重要な役割を果たすことを追加することが重要です。 サウンドと特殊効果(接続スクリードを引っ張る音、バンプ、ブレーキなど)を制御するために、物理的な動作から取得したさまざまな値を計算します。
まとめ
アサシンクリードシンジケート用に作成された物理列車シミュレーターについて話しました。 ゲームのこの部分での作業は非常に楽しく、非常に困難でした。オープンワールドのゲームプレイには、多くのゲームプレイ機能とさまざまなインタラクションがあります。開かれた世界は、安定した持続可能なシステムを提供する上でさらに困難を生み出します。しかし、すべての作業が完了した後、ゲーム内で列車が移動し、ゲームプレイの品質に貢献するのを見るのは非常に楽しいです。
謝辞
この記事と役立つヒントを編集してくれたUbisoft Quebec CityのJames CarnahanとUbisoft Singaporeの三浦信行に感謝します。
また、Ubisoft Quebec Cityスタジオの同僚であるPierre Fortinにも感謝したいと思います。PierreFortinは、列車物理学の開始を支援し、開発を促しました。テクニカルサポートのDave Tremblay。物理学に関するすべての講演についてジェームズ・カーナハン。インスピレーションを与えるアプローチのためのマシューピエロ。 Maxime Begin。プログラミングについていつも話してくれました。助けを求めてビンセント・マルティノー。さらに、マーティン・ベダード、マーク・パレントー、ジョナサン・ジェンドロン、カール・デュモン、パトリック・チャーランド、エミル・ユデストランド、ダミアン・バーデンに感謝します。ダミアンバスティアン)、エリックマーテル、スティーブブレジー、パトリックレガーレ、アサシンクリードシンジケートに取り組んで、このような素晴らしいゲームを作ったギヨーム・ルピエン、エリック・ジラード、そして他のみんな!
参照資料
[1]「バッファーとチェーンカプラー」、https://en.wikipedia.org/wiki/Buffers_and_chain_coupler [注。パー:ロシア語の記事ウィキペディアにはかなり表面的です。組成物に使用される化合物の詳細については、読むことができるここに。]
[2]アンドリュー・ウィットキン、デビッドBaraffによると、マイケル・カスによって、「入門の物理ベースのモデルに」、http://www.cs.cmu.edu/~baraff/pbm /
[3]フレッチャーダン、イアンパーベリー、「グラフィックスとゲーム開発のための3D数学入門、第2版」、CRCプレス、テイラー&フランシスグループ、2011年
。第2版」、モルガンカウフマン、エルゼビア、2010年。