 この話は、私が高速道路の交通渋滞で立ち往生していたときに始まりましたが、それほど大きくはありませんでしたが、30分近く立っていました。 そして、よくあることですが、交通渋滞は自然に解決しました。事故や修理はありませんでした。ある時点で、車はより速く、さらに速く動き始めました。
この話は、私が高速道路の交通渋滞で立ち往生していたときに始まりましたが、それほど大きくはありませんでしたが、30分近く立っていました。 そして、よくあることですが、交通渋滞は自然に解決しました。事故や修理はありませんでした。ある時点で、車はより速く、さらに速く動き始めました。
交通渋滞は通常何をしますか? さて、誰が何を、どのように、そしてその日、私は平和な哲学的ムードにありました-私はただ座って考えました。 彼は特に、ロボモービルに関するギクタイムスに関する投稿を思い出しました。コメントでは、人々とロボットを運転する方法を精力的に比較し、最終的には、道路上の未来はAIのためであり、それによって交通が安全になり、平均速度が向上するという結論に至ったようです。 興味深いことに、交通渋滞はありますか? 言い換えれば、外部(客観的)な状況によって交通渋滞がどれだけ引き起こされているか、そして観客の影響は攻撃的であるかその逆であるか、抑制的な運転スタイルですか? 同時に、かつて読んだ本で、道路交通のモデリングは、まだ解決されていない最も困難な数学的問題の1つであると主張されていました。 まあ、それはおそらく長い間真実ではないでしょう。私は長い間読んでいて、その本はその時新しいものではありませんでした。今ではおそらく正しい理論が書かれ、誰もが自分のコンピューターで数えました。 でも…渋滞は残った? 一般に、空想の飛行は止められませんでした。
したがって、カットの下で、道路上のトラフィックの多かれ少なかれ意味のあるモデルを構築しようとし、運が良ければ、人間のドライバーとAIの運転の違いをシミュレートしようとします。 もちろん、組織全体および一般的に非常に優秀な人々がこの問題に専門的に関与していることは承知していますが、それでもなお興味深いことです。 一般に、非現実的な目標を自分で設定します。
そしてもう1つ-私は頭を使ってしっかりと考えているので、この投稿にはコンピューターモデリングはありません。ハードコアの鉛筆と紙だけです。
まず、微視的モデルと統計的モデルという2つのアプローチがあると言わざるを得ません。 1つ目は、ストリーム内の各マシンの動きを、1つの巨大な方程式系の独立した独立した変数のセットとして個別に考慮し、明らかな理由から、理論家に最も人気があります。 2つ目は、母集団全体を、個々のマシンが確率的にのみ記述されている連続した環境と見なします。 矛盾の感覚から、この2番目のケースから始めます。
最も単純な統計モデル
線形密度ρの均一に分散されたマシンを持つ1つのストリップがあるとします。 ただし、すべてのマシンの速度は異なります。速度vを持つ確率は、時間に自然に依存する確率密度P(v、t)によって記述され、時間t = 0で既知の関数P(v、0)に等しいと仮定します。 一般性を失うことなく、確率P(v、t)はゼロから(私を許して、すべての国の交通警察)無限の間隔で決定されると仮定できます。 正規化と平均 ( グループ )速度の概念も定義されています。

 (1.1)
(1.1)
時間dtの間、各速度vは距離vdtを通過し、遅い速度に追いついて速度を失うことによって「消失」するか、またはより速く追いついて「質量を増やす」ことができます。 時間間隔dtで、速度vの車が速度uの遅い車に追いつく(および減速する)確率はP(u、t)(vu)dtduであり、より速い車に追いつく(および減速する)確率の対称式であることがわかります。 したがって、確率密度の経時変化:
 (1.2)
(1.2)
少し考えれば、解の形式はA(v)B(t)exp(-ρvt)であり、完全な解であることを理解するのは簡単です。
 (1.3)
(1.3)
平均速度自体は時間に依存するため、方程式はエレガントであることがわかりましたが、閉じていません。 ただし、時間による確率密度P(v、t)の変化の詳細には興味がありません。特に、それらは任意の初期関数P(v、0)に依存するため、(vの方程式を閉じるには(1.1)を使用できます。
 そしてここから
そしてここから  (1.4)
(1.4)
この方程式を使用して、すでに作業を行うことができます。いくつかの特殊なケースを見てみましょう。
最初にすべての車が厳密に同じ速度で移動するようにします。
 ここから
ここから
 あるべき姿。
あるべき姿。
ここで、最初に一定の間隔で速度が均等に分配されると仮定します。

この場合、平均速度は1 / taに低下し、平均移動距離は対数的に増加します。
 -そして、これは渋滞中にこの投稿を読んでいる人にとっては朗報です-あなたはまだ指数関数的な時間であるにもかかわらず、その場所に着きます。
-そして、これは渋滞中にこの投稿を読んでいる人にとっては朗報です-あなたはまだ指数関数的な時間であるにもかかわらず、その場所に着きます。
ただし、明らかな矛盾が1つあります。ストリーム内に任意の低速の車がある場合、平均移動距離は時間とともにどのように増加しますか。 答えは、速度が厳密にゼロの車の数もゼロであるということです。 次の形式で初期分布を取得する場合:

つまり、ほとんどすべての車が同じ速度で移動し、非常に小さな部分だけが立っていると、グループの速度は指数関数的に低下します

また、平均移動距離は一定の制限になりがちです。
したがって、私たちは数枚の紙を使い、遅かれ早かれ、単一車線の道路で、誰もが最も遅い車の尾に埋もれ、その速度で引きずられることを示しました-素晴らしい結果です。 もう少し現実的なオプションを試してみましょう。
現実への一歩
注意深く読んでいると、この場所に合法的な当惑の感覚があるはずです。渋滞はどこですか? いったいなぜ、線密度ρが時間または座標に依存しない定数であると仮定するのですか? 結局、交通渋滞は本質的に車の集まりです。 そうです、現在のモデルのフレームワークでは、非常に大きな間隔で平均化された動きのプロファイルを考慮します。そのため、平均化された密度は一定です。 その内部では、車は完全に空の隙間がある列に崩壊しますが、モデルの特徴的なスケールでは、これらはすべて重要ではありません。 不均一性、列、またはギャップの特性サイズは時間とともに増加し、今では最終的に特性スケールと等しくなると、コルクが発生する可能性がありますが、モデルは適用できないためそうではありません。 より詳細なモデルを探す必要があります。 また、ストリーム内を移動する個々のマシンでは、以前に使用した速度P(v、t)の分布はなく、速度v(x、t)と局所密度ρ(x、t)しかありません。 彼女と一緒に働きます。
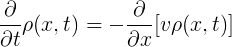
まず、密度については、連続方程式が満たされる必要があります。
 (2.1)
(2.1)
本質的に絶対に基本的な法則は、パイプにどれだけ流れ込んだか、それだけが流れ出るべきであることを意味します。 ρvは、単に単位時間あたりの道路区間を通過する車の数であることに注意してください。
もちろん、この方程式には無限の解があります。たとえば、任意の速度vの任意の密度プロファイルの動きを記述する任意の関数f(x-vt)になります。 機械とともに移動する座標系に移動する場合、この式はさらに単純な形式、 ρv= constを取ります。 密度が法則ρf(x-vt)に従って変化し、速度uが低下した道路の前でu <vであるとすると、密度プロファイルはPf(x-ut)のようになります。ここで、 ρv= Puです。 このようなモデルは理想的なガスに似ており、道路上の交通の理想的な挙動を表します-速度が低下すると、密度が比例して増加し、単位時間あたりの道路区間を横断する車の数は一定です(変動f(x)に正確)、いつでも旅行する時間を計算できます一定の距離であり、道路上の他の車に依存しません。
それでも、 渋滞はどこにありますか?
理想的なガスモデルは、相互作用しない粒子の状態を表し、相互作用が考慮されると非理想性が始まります。 それは私たちにも同様に判明します-車が近すぎるときにブレーキを考慮する必要があります。 ブレーキ距離は、式v 2 / 2a +vτ+ dで記述できます。ここで、aは、定数によって(大まかに)推定される快適なブレーキの加速度です。 τは時間の次元であり、ドライバーの反応時間の次数です。 dは車の長さのオーダーの値です。
空間密度ρは逆数でなければなりません。 わかった? いいえ、高速の限界では密度は1 / v 2ではなく1 / vに低下するはずですが、道路区間ρvを通る車の流れさえも速度の増加とともに減少することがわかりました。 間違いは、ドライバーが制動距離に反比例する間隔を維持しないことです。前の車が即座に停止する可能性がある場合-あまりにも強い仮定で、実際には同じ加速度aで制動します。 次に、二次項が消え、合理的な式が得られます。
ρmax = 1 /(vτ+ d) (2.2)
密度が1 / d (つまり、バンパーからバンパー)に増加すると、自動車は立つことができるだけであり、速度が増加すると、流れは制限に向かう傾向があります: ρv= 1 /τ 。 これは、 与えられた速度での最大密度を表す式で、車がさらに近くに収束すると、減速し始めます。 多分これについて詳しく説明しすぎたかもしれませんが、特定の限定的なケースを考慮して、正しく組み込まれたモデルがそれ自体を修正し始める方法を示したいと思いました。
同じ速度vと密度ρの車のコンボイを道路に沿って移動させます。 この列が、速度u <vで減速してセクションに入ると、マシンの密度が増加します。これは、以前見たように、 ρ * =ρv/ uです。

ただし、密度がクリティカルに近づくと、道路の新しいセクションがそのようなストリームを通過できないことが判明する場合があります(道路セクションを通る自動車の最大流量はνmax(u)=uρmax(u)= u /(uτ+ d)であり、速度が低下すると単調に減少します) )
ρ * =ρv/ u>ρmax = 1 /(uτ+ d) 。
ここで、速度と密度プロファイルの変化を表す方程式(2.1)が登場しますが、非定常および振動を含む無限の解があります。 上から道路のスループットを最適化するための理想的なケースを考えてみましょう;このためには、全知の悪魔マクスウェルが各車を運転しなければなりませんが、それでもなお。 その後、各車は、次のような神秘的に予測された速度uに正確に適切なタイミングで事前に減速します。

さらに、ブレーキ境界は、簡単に計算できる速度で左に移動します。
[ρv-u/(uτ+ d)] / [1 /(uτ+ d)-ρ] = [ν-νmax(u)] / [ρmax(u)-ρ] (2.3)
そして、フロントフロントで何が起こっていますか? ある時点で制限速度が消えてから、前部が蒸発し始めたとします-車は初期速度vまで加速し始め、前部も左に動き始めます。 ただし、蒸発速度は明らかにブレーキ速度よりも低くなります。 主な理由は、ドライバーが目の前のブレーキライトを見るとすぐに減速し、加速のために前の車までの距離と速度を評価する必要があるためです。 経験的な考慮なしに前面蒸発速度を推定することはかなり困難ですが、速度制限uに依存する左境界の速度(2.3)よりも大きいまたは小さいと仮定できます。 そして、それがより少ないことが判明した場合、道路上のソリトンのようなものが得られます-車の1つのランダムな短時間のブレーキングと既存の有限時間から生じる安定したフォーメーション。 このようなソリトンが発生するために、実際の速度制限を設定する必要はもはやないことを追加することが重要です。マシンの1つが、 τを超える時間で自発的に減速し、ある臨界速度未満の速度になれば十分です。
実際の交通渋滞の前に小さなステップが1つ残されました。形成されたソリトンは不安定で、密度が重要(2.2)であることに気付くのに十分です。コラム内のマシンの1つをランダムに十分に強く制動すると、新しい同様のプロセスが発生し、さらに低速で新しいシールが形成されます。 このようなフォーメーションの寿命が十分に長い場合、このシナリオは繰り返され、道路上のまばらなセクションに到達するか、実際の生活で実際に観察される列の終わりに車が完全に停止するまで重なります。
これで、確率の理論に基づいて、結果のソリトンの長さ(トラフィック密度の変動によって決定されます)、その寿命、さらに大きな圧縮の可能性、トラフィックが完全に停止する可能性、およびトラフィック容量の平均的な減少を推定することが可能になります。 要するに、この単純なモデルに基づいて、道路交通の完全な確率的記述を構築することが可能です。 しかし、私はポスト内の数式の数の制限を長い間失効させたのではないかと疑っています。さらに、いくつかの経験的および/または定量的データが必要になるので、どうしても避けようとしました。 個人的には、交通渋滞がどのように発生するかをすでに理解しており、そこから喜びを得ています。 さらに、私は悪の勢力が私の人生から30分引き出したことに気付き、すぐにより良く、より楽しく生き始めました。
しかし、ロボットはどうですか?
そして、それらはすべて単純です。私は人間特有の仮定をしていなかったので、基本モデルも彼らに当てはまります。 つまり、ロボモービルがその能力の限界で道路に沿って運転することを余儀なくされると、交通流に自発的な障害が発生し、完全に停止するまで減速する可能性があります。 ただし、このような障害の可能性は大幅に低減できます。
- 第一に、ロボットだけで構成されるフローでは自発的な変動がはるかに少ない頻度で発生し、ロボットは運転中にくしゃみをせず、火のついたタバコを落とさず、乗客のチャタリングに気を取られず、実際に減速する主観的な理由はありません。 ただし、客観的な理由(たとえば、道路の滑りやすいストレッチ)は残っています。
- 第二に、理論的には、ロボットの反応時間τははるかに短く、限界ではゼロになります。 ただし、ロボモービルの開発者は、アルゴリズムを駆動する際に人為的に過大評価しているのではないかと心配しています。 時間が経つにつれて、この準備金も関係します。
- 第三に、感情はロボットにとって異質であり、特に焦り、to望、貪欲です。 これにより、必要な最小距離よりも少し長く距離を保つことができます。その結果、スループットは少し直線的に減少しますが、交通渋滞の確率は非線形的に何度も減少します。 しかし、このためには、少なくともロボモービルが道路上で勝つことが必要です。
- 第四に、これは人間と人間を区別する最も重要なことです。ロボットはマクスウェルの悪魔にずっと近いです。 特に、道路上の情報交換を許可した場合、各セクションのトラフィックを制御する仮想分散AIを作成できます。 簡単な例として、誰もがトラックの列の最初の速度を常に知っていれば、トラックの列が明らかに勝つことができます。 もう1つ-前方(どこかかなり遠く)で圧縮が開始されることがわかった場合、マシンは事前に間隔を広げてコルクの広がりをブロックできます。 そして最後に、車が前の車から加速の信号を受信すると、加速時間が大幅に短縮され、ソリトンの寿命が劇的に短縮され、雪崩効果が防止されます。
- そして最後に、道路を設計および構築する人のために-速度制限がv maxの各道路にはv max /(τvmax + d)のオーダーの最大スループットがあり、フローの増加が予想される場合(都市が成長する)この値のセクションでは、道路の拡張を予測するか、最高速度を上げるとよいでしょう。 まあ、これはもちろん絶対的な空想の領域からです。
ロボモービルのメーカーが現在どのモデルを開発しているのか、一般的には、それらが道路で勝つまでに精神的に準備されているかどうかはわかりません。 しかし、それは時間だと私には思えます。 地元の運転アルゴリズムを補完し、協調的なものに拡張する時が来ました。そうすれば、渋滞に立ち向かう時間が少なくなり、世界が少し良くなります。
PS:当初、Giktaymsでこの投稿を計画していましたが、適切なハブがないことに驚きました。 私の意見では、正しい組み合わせは数学 +楽しいタスク + 未来の輸送でしょうが、最初の2つはHabréと開発セクションにのみ存在することがわかりました。 さて、大丈夫、私はハブが対応する場所に書き込みます。