この記事では、慣性センサーについて説明します。 それらが何を測定し、これらの物理量をどのように使用できるかについて。
最近のほとんどの携帯電話には、3つの加速度計、ジャイロスコープ、磁力計が搭載されており、多くの場合、それらに加えて気圧センサーも取り付けられています。
最後のセンサーを使用すると、すべてが非常に明確になります。自宅や国のほぼ全員に、気圧計とそのミリメートルの水銀柱が、愛する祖母の雨、悪天候、一般的な幸福としっかりと結びついています。 しかし、加速度計、ジャイロスコープ、磁力計は何を測定し、この情報を使用して宇宙でのデバイスの向きを判断する方法は何ですか?
加速度計
ウィキペディアによると、加速度計は見かけの加速度の投影を測定するデバイスです。 典型的な加速度計は、重力加速度と直線加速度を記録する相互に垂直な3つの測定軸で構成されています。
3軸加速度計の測定値を使用して、基準ベクトル(この場合は重力加速度)に対する相対方向を決定できます。 ただし、方向は完全には解決されません-重力加速度の方向に平行な軸の周りの回転角度については不確実性が残ります。
これについては、次の図で詳しく説明します。 X、Y、Zの3つの軸を持つ加速度計を備えた測定装置があることを想像してください。図では、これらの軸は赤、緑、青で示され、左の3つのベクトルを形成します。 明らかに、重力加速度ベクトルのみが方向を決定するために利用可能な場合、加速度計のZ軸が重力加速度の値を測定する測定デバイスの可能な方向が無限にありますが、デバイスの絶対方向を解決することはできません。

磁力計
方向付けを完全に有効にするには、最初のベクトルと平行ではない2番目のベースベクトルが必要です。 そのようなベクトルは、たとえば、私たちの惑星の磁場のベクトルにすることができます。 その方向がわかっている場合、方向は明確に解決されます。
ある座標系の別の座標系に対する方向を知ると、測定値をデバイスの座標系からグローバルな座標系に転送することが可能になります。 また、グローバル座標系の加速度に関する知識により、統合により速度を回復し、相対位置に関する情報を取得できます。
ジャイロスコープ
ジャイロスコープを使用すると、デバイスの回転速度をそれぞれ測定して、速度を統合する必要がある回転角度に近づけることができます。 オリエンテーションの主な問題は、ジャイロスコープの助けを借りてのみこの位置に関連しています-ゼロオフセットまたは温度効果によって引き起こされる角速度のあまり正確ではない測定の一定の統合により、オリエンテーションドリフトが発生します。
方向フィルターで3つすべてのセンサーを使用する利点は、次のとおりです。
- ジャイロスコープの測定のおかげで、フィルターの反応性を維持しながら方向ジャンプを同時に抑制することが可能になります。実際、遅延のないローパスフィルターのアナログが得られます。可視化中、オブジェクトが回転すると「滑らかさ」が観察されます。 クイックスタートに適したフィルターはMadwickフィルターですが、私の意見では、Mahoneyフィルターはさらに直感的です。なぜなら、方向エラーは勾配を使用せず、単純なベクトル乗算によって計算されるからです。
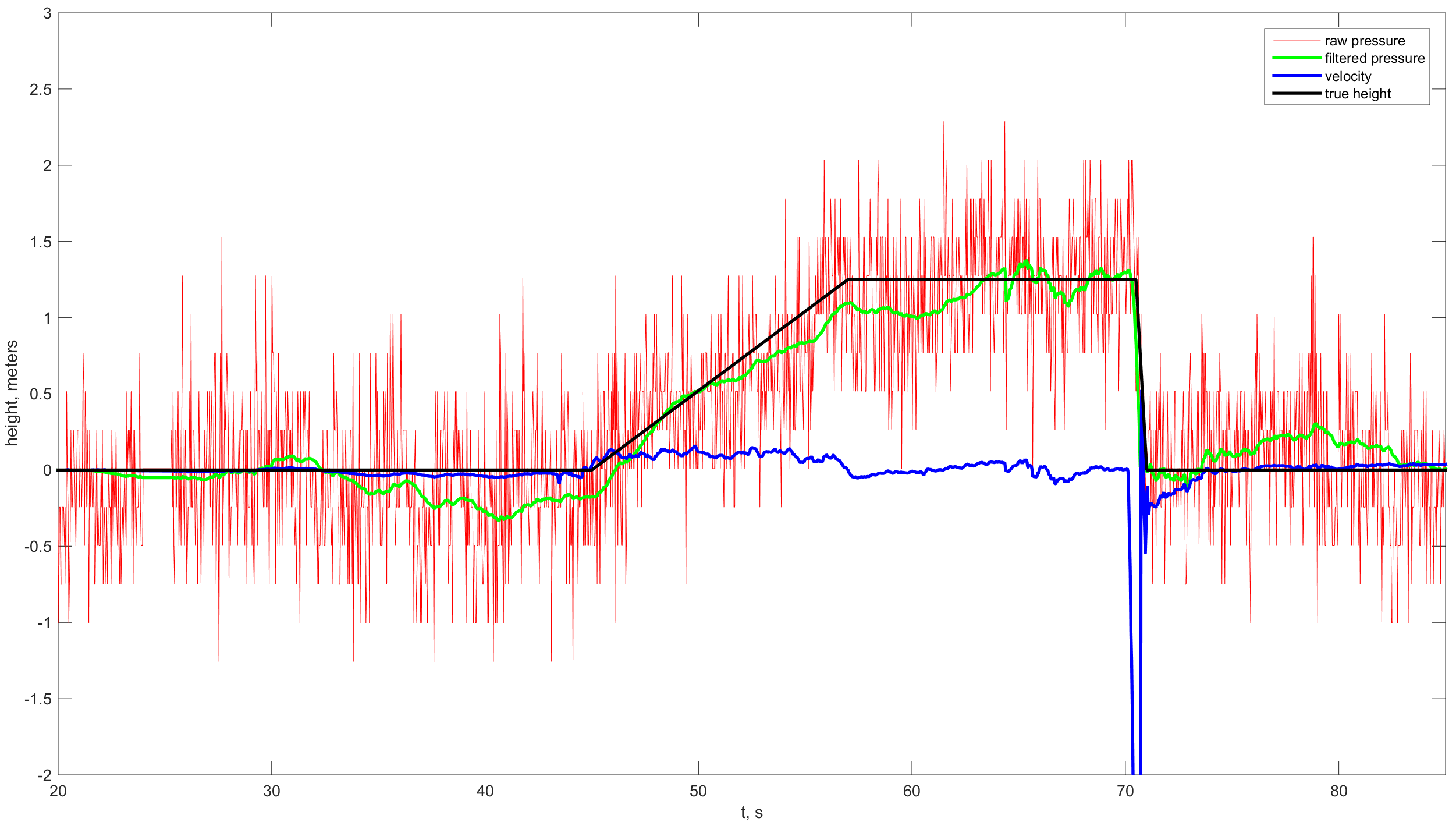
同様のフィルターを使用して、センサーのペアの測定値を組み合わせることができます。 たとえば、次の図は、カルマンフィルターを使用した高度推定の結果を示しています。気圧データは測定値として使用され、加速度計の測定値は外部の影響として使用されます。 ところで、ハブロには同様の解決策があり、加速度計と気圧計を使用して、クアドロコプターの高さを安定させます。
- システムの状態ベクトルにセンサーパラメータを含めることが可能になります。たとえば、加速度計とジャイロスコープのゼロオフセットなどです。 使用されるフィルターは、相補フィルターまたはカルマンフィルターに基づいて構築され、センサーのゼロオフセットの真の値に徐々に収束します。
- キャリブレーションデータの収集を効率的に整理できます。 そのため、磁力計のキャリブレーションデータを収集してボールの表面をできるだけ均一に覆う場合、ボールの必要なすべてのセグメントに少なくとも1つの測定値が含まれた後にのみ、デバイスの方向データを使用してキャリブレーションプロセスを開始できます。
- 方向を決定する際の主な問題を何らかの方法で解決することが可能になります:外部加速度の方向を評価するか、特定の点に局所的な磁気disturbance乱が存在するかどうかを決定するため、磁力計の測定を信頼するべきではありません。
慣性センサーからのデータをどのように使用できますか?
デバイスの向きを決定する従来のよく研究されたタスクに加えて、慣性センサーを使用して次のことができます。
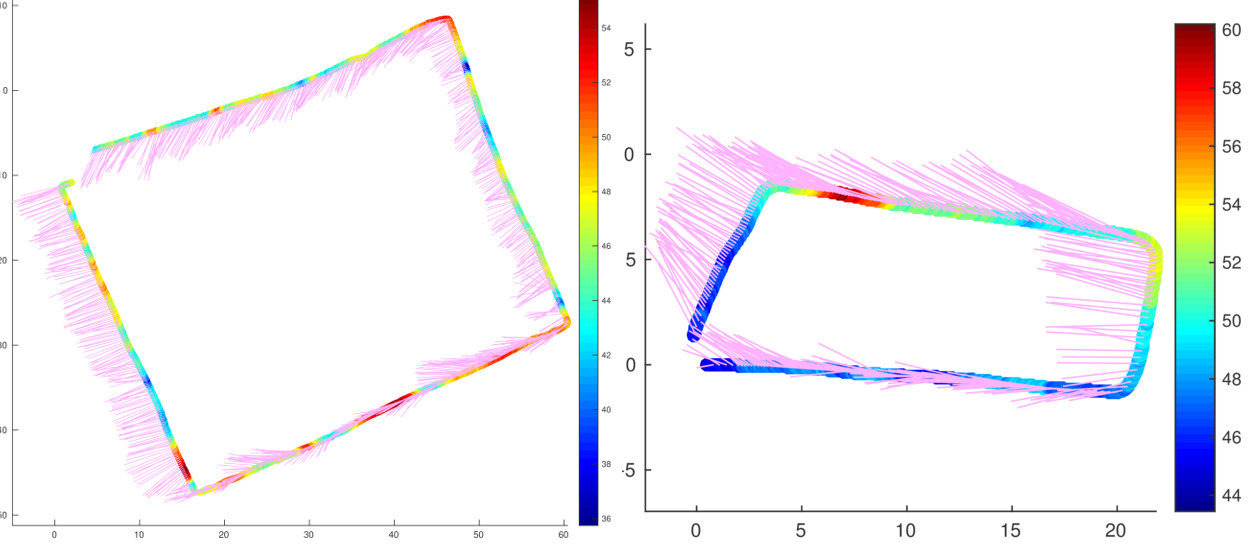
- 部屋の磁気地図上のデータの収集。 そのようなカードの例を下の図に示します。 建物のさまざまな部分で、磁場の大きさ(μT)だけでなく、磁気誘導ベクトル(ピンク色の線で示されている)の方向も変化していることがわかります。 このようなマップは 、従来の無線信号カードに加えて、オブジェクトの洗練された位置決めに使用できます 。
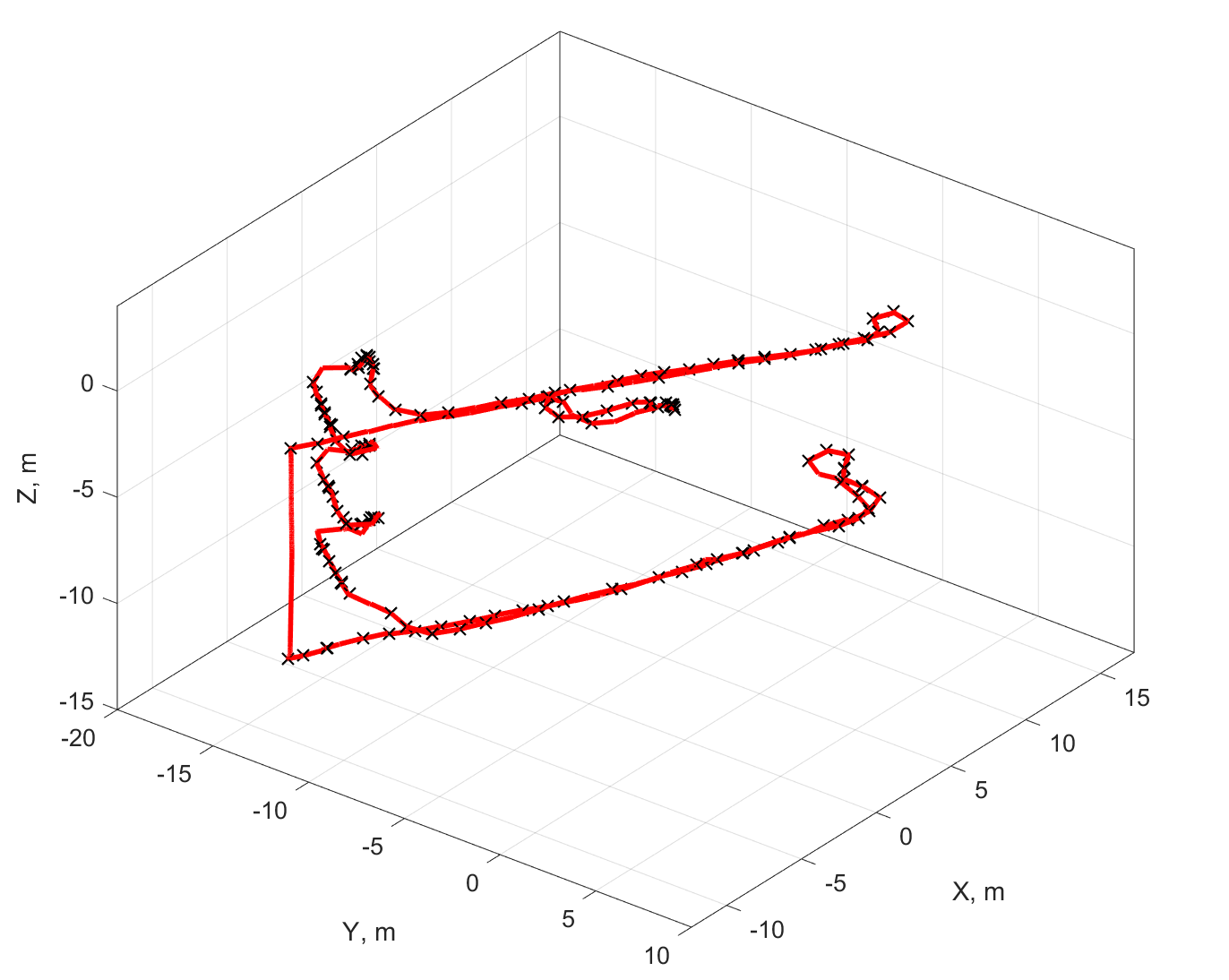
オブジェクトの軌道を復元します。 そのようなオブジェクトは、歩行者または車であり得る。 場合によっては、たとえば、デバイスを足に取り付けて、センサーの予備の正確なキャリブレーションを行うと、100メートルを超える光路長で数10センチを超えない、移動開始点に戻る誤差を達成することができます。 大気圧センサーの測定値によって補完される、ZUPTメソッド(不動期間中にエラーをリセットする場合)によって復元された軌道の例を次の図に示します(移動の軌道には、廊下に沿った通路、階段を下り、別の通路、エレベーターのリフトが含まれます)。 同様の方法がすでにここのハブで言及されています 。
デバイスを人体に任意に取り付けると、開始点に戻るエラーは、通常、はるかに大きくなり、移動距離の15〜20%になります。 この値は、第1に、ステップ長の決定におけるエラー、第2に、移動方向の決定におけるエラーによるものです。
イベントを発生させるか、デバイスを制御します。 空中に図または画像のデバイスを「描く」ことでこれを行うことができます。たとえば、∞という記号を使用して磁力計のキャリブレーションを開始し、デバイスの縦波を-緊急メッセージを生成し、トリプル「タップ」-オフにします。 これらのタスクは、事前に訓練された分類器を使用して解決されます。
- 現在のユーザーアクティビティの定義。 たとえば、オフィスでデバイスを使用する場合、就業時間中に移動した人の数と移動の種類(彼が座っている間に立ち上がった時間、建物の周りのさまざまな散歩に費やした時間)を知ることが役立つ場合があります。
将来の記事では、慣性センサーの操作方法のトピックを明らかにする予定です-慣性センサーを調整する方法を議論します(これは既にHabrで議論されていますが)、人の軌道を復元する既存の方法を見て、磁場の摂動を検出および除去するアプローチを研究し、議論しますタイムリーなタイムスタンプとその測定の処理のためのファームウェアアーキテクチャ。
著者はアレクサンダー・ミコフです。