
ブログでは、通信システムの開発と高度なプログラミングに向けた最初のステップについて書いています。
ただし、学生の活動はオリンピックへの参加に限定されません。本日は、ITMO大学の経営情報学部の一部として作成された学生設計局(ロボット工学部門またはRED)の仕組みについてお話します。
REDプロジェクトはどのようにそしてなぜ起こったのか
ちょっとした歴史:3年目の「ロボットのインテリジェントテクノロジー」分野の学士号は、S&I部門で実践的なトレーニングを受けます。 そのため、学生は実際のロボットシステムとそれらを使用した作業の基本について理解します。 練習は約1か月続き、この期間中、学生はグループで作業するか、単独で、既存の機器で小さなプロジェクト(ほとんどの場合ソフトウェア)を実行します。
将来、彼らはしばしば彼らが始めたプロジェクトで働き続け、それをすでに「メカトロニクスおよびロボットシステムのためのソフトウェア」という主題の枠組みの中で改善しています。
2015年、こうした実践の過程でREDが登場しました。最も成功した6人の学生が、学科の「より重要な」部分になり、独自の設計局を形成するよう招待されました。 今、REDでは、彼らは「義務的な慣行を通過する」だけでなく、創造的な可能性を認識し、ロシアおよび外国のロボット展示会に参加し、プロジェクトで「成長」し、比較的単純な問題の解決からより複雑で大規模な問題に徐々に移行できます。
現在、設計局はいくつかの目標を設定しています。それは、科学開発の分野での学生の統合、ロボット競技会への参加、部門の設備に基づいた学生プロジェクトの実施です。

典型的なRED作業環境
仕事で使用するもの
2015年に設計局が登場したとき、現在のプラクティスの主流はROSオペレーティングシステムでした。 ROSは、さまざまなソフトウェアコンポーネントの開発と統合を容易にするロボット用のパッケージとインフラストラクチャのセットです。 言い換えると、ROSはロボットをプログラミングするためのシステムソフトウェアであり、分散作業に機能を提供します。
ROSは、ハードウェアの抽象化、低レベルのデバイス制御、プロセス間のメッセージの受け渡し、パケット管理などのサービスを提供することに注意してください。 ROSはアマチュアプロジェクトと教育プロジェクトの両方で使用されており、特に産業用ロボットの開発では、ROS-Industrialソフトウェアがロボットモデルの記述に使用されています。
教育プロセスにROSを選択した理由は、汎用性と比較的単純です。 ROSは、さまざまなアーキテクチャの機器間の相互作用を構築するのに便利な抽象化レイヤーを導入します。 さらに、膨大な数のパッケージが存在するため、ほとんどの場合、ハードウェアドライバーをゼロから作成する必要はありません。 もちろん、ROSは最良または唯一の正しいソリューションではありません。
たとえば、サンクトペテルブルク州立大学のマットメックの同僚が開発したTRIKコントローラーで実行されるロボットをプログラムするには、独自のSDKが使用されます。
私たちは何を開発しています
すでに2015年に、設計局に基づいて、いくつかのプロジェクトを実施することができました:リーフレットを配布するロボットプロモーター(LynxmotionのJohnny5ロボットに基づく)と、2つのロボットのマルチエージェントシステム用のグローバルローカリゼーションシステム(Festo DidacticのRobotinoに基づく)。
ロボットプロモーター
3年生の2人の学士号は、Johnny5で3か月間働きました。 当初、Johnny5ロボットには情報を処理するための「頭脳」がありませんでした。コントローラーはサーボの制御のみを担当するため、ROSがインストールされた外部コンピューターが情報処理装置として使用されます。
外界に関する情報は、Microsoft KinectやASUS Xtionなどのモーション認識デバイスを通じて取得されます。 実際、ROSを介して、テクニカルビジョンシステム、コンピューター、ロボットコントローラーの間に「通信」があります。 これを行うために、学生は、シリアルインターフェイスを介してコマンドを送信するためのコントローラーのドライバーと、ビジュアルデータを制御するためのハンドラープログラムを作成しました。
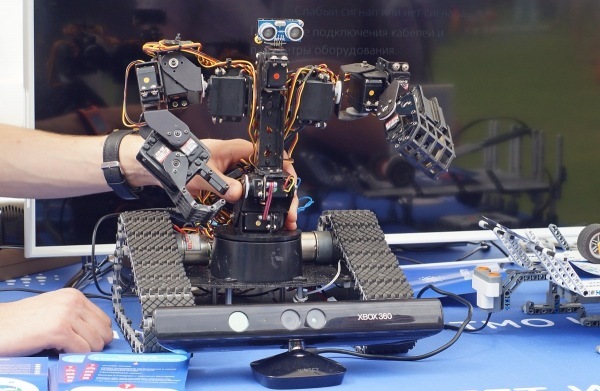
GeekPicnic 2015でJohnny5ロボットがチラシを配る
学生は視覚の小さな統合を実行することができました。これにより、ROSの下にドライバーがあれば、あらゆるモーション認識デバイスを使用できるようになりました。 たとえば、Microsoft KinectおよびASUS Xtionのドライバーは、自由に配布されたライブラリから取得されました。
その結果、生徒は人を検出し、注意を引き、人が近づくとすぐにリーフレットを配布できるロボットを手に入れました。 将来的には、ロボットに人間の顔を認識させることを教えるとともに、大きなコンピューターをRaspberry Piに似た単一のボードに置き換えることが計画されています。
Robotinoマルチエージェントシステム
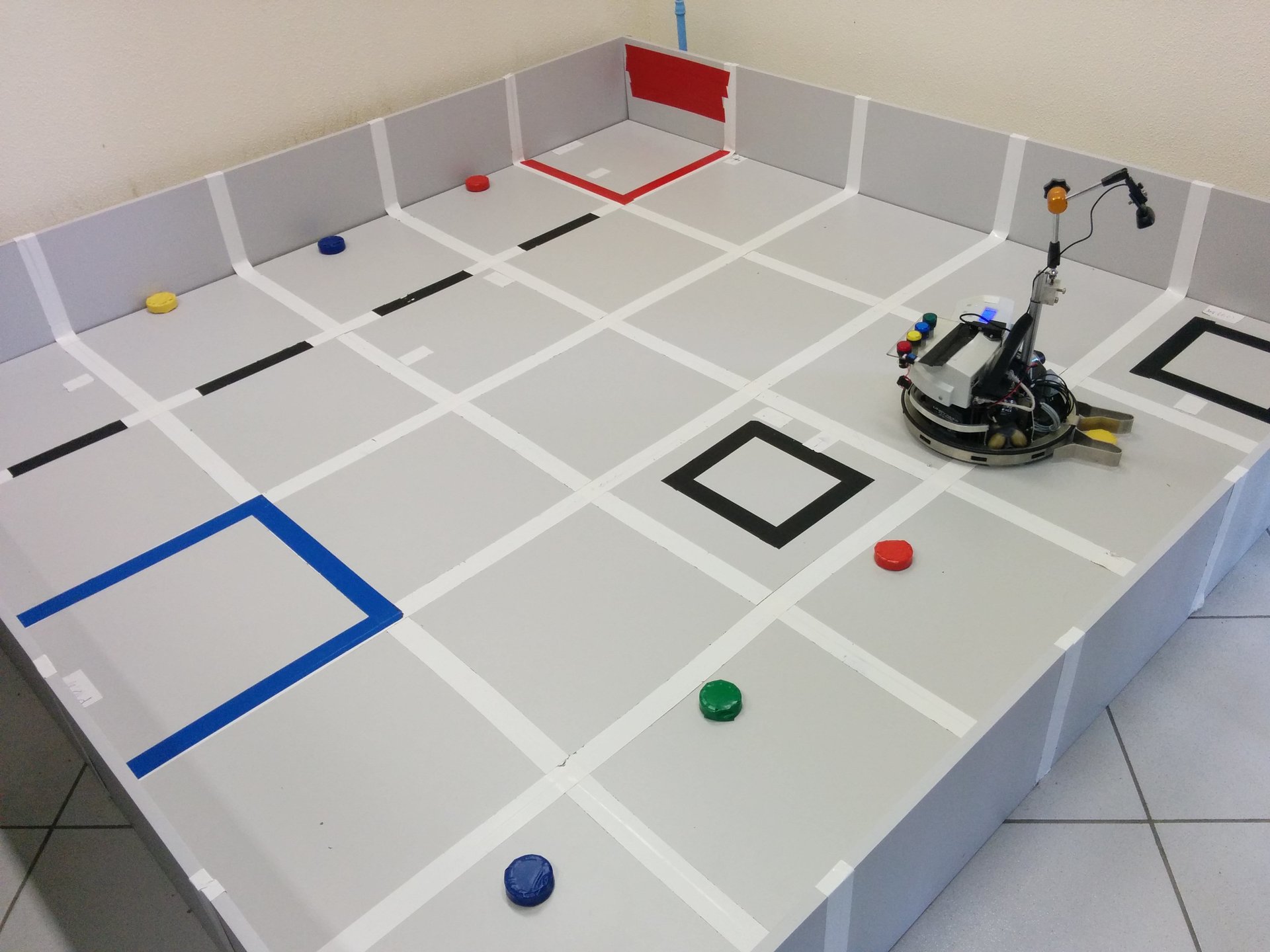
3年生の2人の学士号も1か月間Robotinoで働いていました。 ROSライブラリにはRobotinoを操作するためのパッケージが既に含まれており、学生はこれらのパッケージを調整して、1台のPCから2つ以上のロボットを制御できるようにしました。 屋内ナビゲーションシステム-Festo DidacticのNorthstar Sensorがビューとして使用されます。
さらに、学生は、ロボットの位置の推定値を取得するために必要な計算を実行するソフトウェアを作成しました。 したがって、Robotinoロボットはローカライズできます。つまり、Northstarが箱から出して許可するよりも大幅に大きい領域での位置の公平な推定値を受け取ります。

ブラジル、ビトリアのUFES大学を訪問するRED
REDロボットの人気
それ以来、REDチームは、GeekPicnicやRobot Ballの展示など、いくつかの人気のある科学イベントに参加し、ブラジルのロボット産業(UFES、UNESP、UFABC大学)の同僚と連絡を取りました。
ブラジル、サンパウロ、UNESP大学のRoboCup Logistics Leagueの競技場
2015年の夏、サンクトペテルブルク州立大学のMat-Mechの同僚と協力して、ロボット工学に関する一連の講義とワークショップ-Summer Cybernetic School 2015が開催されました。トレーニングタスクを完了しながらREDで作業する。
REDの管理者は、REDの一部として引き続きプロジェクトに取り組み、その後、より深刻なタスクを進めるように勧めています。 ジュニアの生徒はREDの仕事に実行可能な貢献をします。たとえば、一部の生徒はロボフットボールに従事しています。 最も有能な人は、REDに早まって採用されます。

サマーサイバネティックスクール2015
今後の計画
新しいタスクを選択するとき、REDの学生は利用可能な機器を基に構築するため、既存のロボットとセンサーのタスクを策定します。 幸いなことに、それらの多様性は非常に大きいため、ナビゲーションからマニピュレーター制御まで、さまざまな分野のロボットの問題を解決できます。
学生も参加できる既存のプロジェクトがあります。 さらに、誰もが新しい機器のための新しいプロジェクトを提案することができ、そのプロジェクトに価値があるとほとんどが判断した場合、その予算はRED予算から割り当てられます。
一般に、私たちのチームはロボット工学の最も多様な分野に興味を持っています。 過去1年間に完了したタスクから判断すると、以下が含まれます。
- ロボットの技術的ビジョン;
- ロボットのマッピングとローカリゼーション(SLAM)(IR距離計センサーと詳細な画像のカメラを使用);
- マニピュレーター制御(直接および逆運動学の問題);
- サッカーロボット。
将来、REDは国際的なロボット競技会(特に、RoboCupとEurobot)に参加する予定です。 さらに、一部のREDメンバーは、スタッフ以外の従業員とともに、モバイルロボット工学のイーサリアム分散ネットワークへの統合に関連するプロジェクトに関与しています。