内容
- テンソルとは何ですか、なぜ必要ですか?
- ベクトル演算とテンソル演算。 テンソルランク
- 曲線座標
- テンソル博覧会のポイントのダイナミクス
- テンソルのアクションとその他の理論的な質問
- 自由固体の運動学。 角速度の性質
- ソリッドの最終回転。 回転テンソルのプロパティとその計算方法
- Levi-Civitaテンソルの畳み込みについて
- 最終回転のパラメーターによる角速度テンソルの導出。 頭とマキシマを適用
- 角速度ベクトルを取得します。 欠点に取り組む
- 自由な動きでの体のポイントの加速。 ソリッドの角加速度
- 固体運動学におけるロドリゲハミルトンパラメーター
- テンソル式の変換の問題におけるSKA Maxima。 ロドリゲ・ハミルトンのパラメーターにおける角速度と加速度
- 剛体のダイナミクスの非標準的な紹介
- 非自由な固体運動
- 固体の慣性テンソルの特性
- ナットジャニベコバのスケッチ
- ヤニベコフ効果の数学的モデリング
はじめに
前の記事は、ヤニベコフ効果の数値シミュレーションに関するものでしたが、最初のリアプノフ法にかなり近似しているにもかかわらず、この効果を定性的に研究できることが突然思い浮かびました。 しかし、数値モデリングも非常に興味深い質問であり、特に私の研究問題の面にあります。 したがって、今日は
- 最後に、Rodrigue-Hamiltonパラメーターを使用して、空間内の身体の方向を記述する方法を決定します。
- 自由体の運動方程式の表現形式を考えてみましょう。テンソル方程式を行列および成分方程式に変換する方法を示します。
- 主慣性モーメント間のさまざまな比率で自由剛体の運動をシミュレートし、ジャニベコフ効果がどのように現れるかを示しましょう。
1.テンソル形式の自由運動の微分方程式
これらの方程式をベクトル形式で繰り返し検討しました
ベクトル表記は、依存関係の性質の一般的な分析に便利であり、馴染みがあり、特定の用語の意味を示します。 ただし、方程式をモデリングに便利な形式にさらに変換するには、テンソル表記に渡します
どこで
方程式系(2)は既に閉じられており、それを統合することで、重心の運動の法則と時間に対する体の角速度の依存性を得ることができます。 しかし、私たちはまだ身体の向きに興味があるので、この方程式系を補足します
方程式(3)は、ロドリゲハミルトン方向パラメーターによる角速度の成分の表現にすぎません。 以前の記事ですでにこの表現を受け取っています。 次に、方向パラメータを角速度成分に関連付ける微分方程式として考えます。
ただし、Rodrigue-Hamiltonパラメーターは冗長です。4つのパラメーターがあり、3つの座標で空間内の身体の向きを説明できます。 また、システム(2)、(3)の未知数の数は、方程式の数を1つ超えています。 したがって、式(2)および(3)を方向パラメーター間の関係式で補足する必要があります。 Rodrigue-Hamiltonのパラメーターに関する記事では、身体の回転が単一の四元数によって都合よく記述されることを示しました。
または、テンソル形式
(4)を時間で区別します
スカラー積の可換性を考えると、
望ましいコミュニケーションの方程式があります。 テンソル形式の自由剛体の完全な運動方程式系は、次の形式になります。
かなり怖い-(6)13個の未知の量を持つ13個の非線形1次微分方程式が含まれています。 一般的なテンソル表記のために恐ろしいように見えますが、特定の座標(この場合はデカルト座標)に移動すると、システム(6)は大幅に簡略化されます。
2.デカルトベースの剛体の運動の微分方程式の行列形式
身体の位相座標の列ベクトルを導入します
どこで
デカルト基底では、計量テンソルは単位行列で表され、クリストッフェル記号はゼロに等しいため、方程式系(6)は次のように行列形式で記述できます。
行列が導入される場所
一次微分に関してシステム(7)を解くと、
コーシーの形の運動方程式系。
3.ジャニベコフの効果のモデリング
外力要因がない場合、システム(8)の右側はゼロであり、重心の運動方程式は初期条件を考慮して簡単に統合されます。
ナットの回転は、(8)から得られる7つの1次方程式のシステムによって記述され、無次元の慣性モーメントを導入します。
システム(9)の数値積分のために、初期条件を設定します
どこで
パラメータ値あり
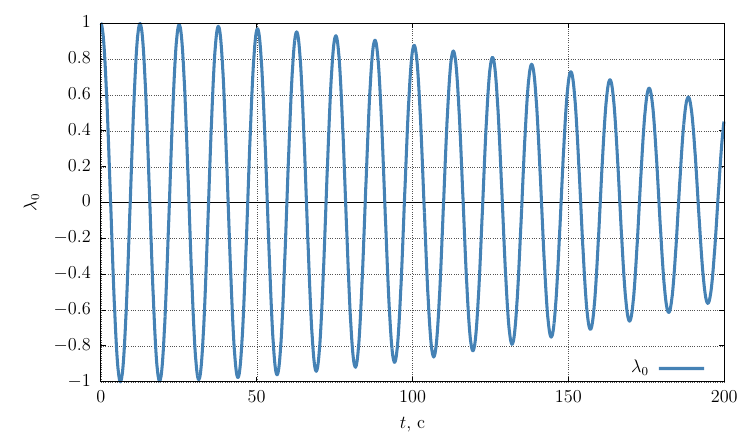
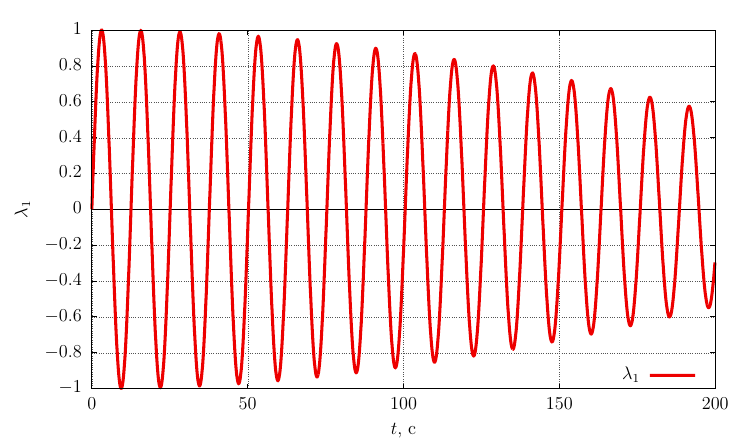
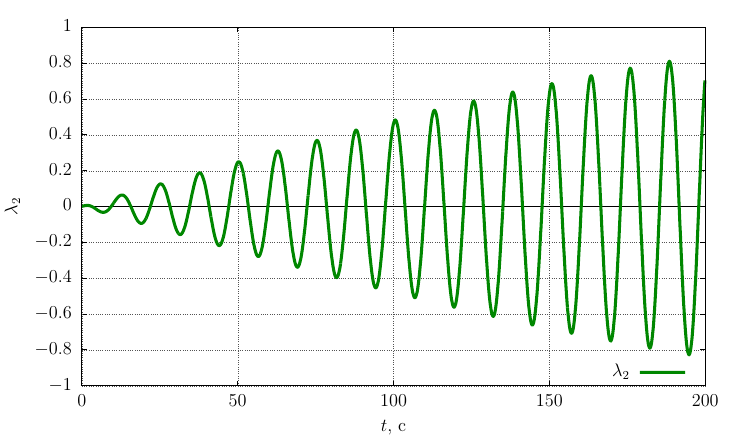
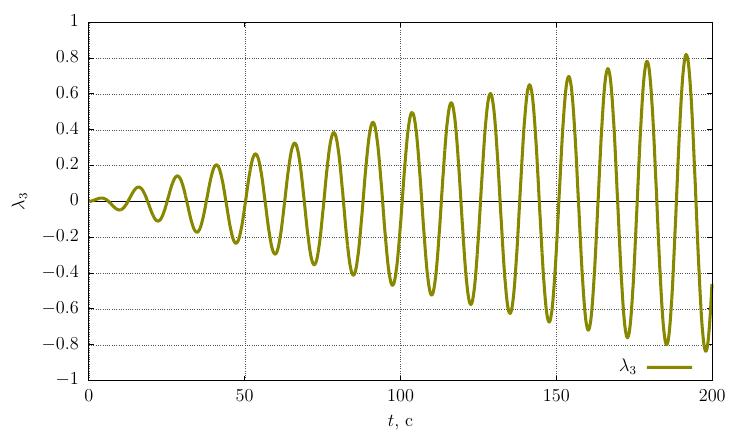
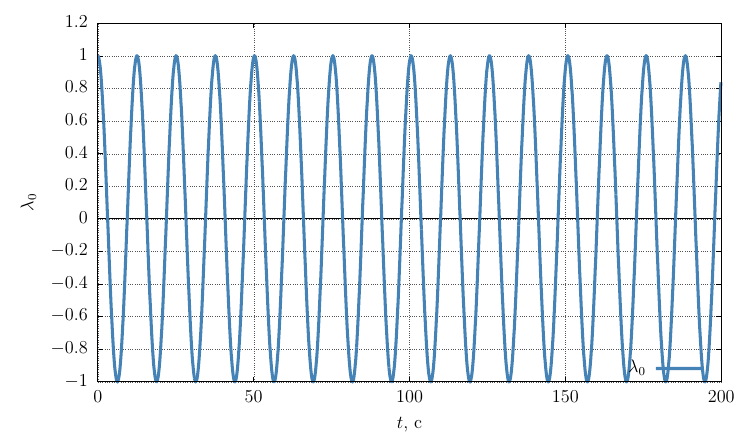
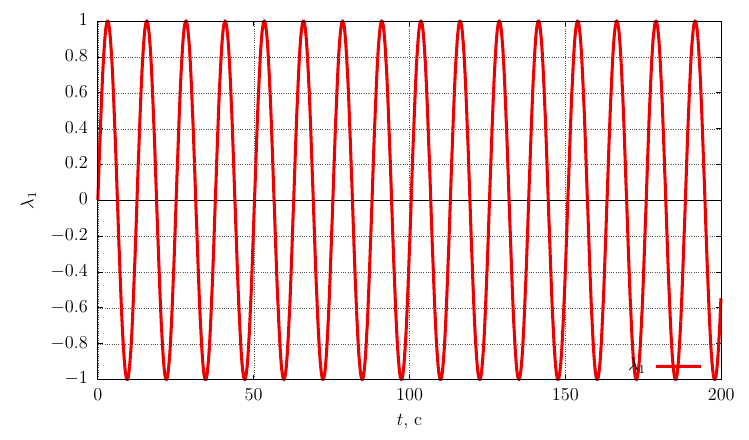
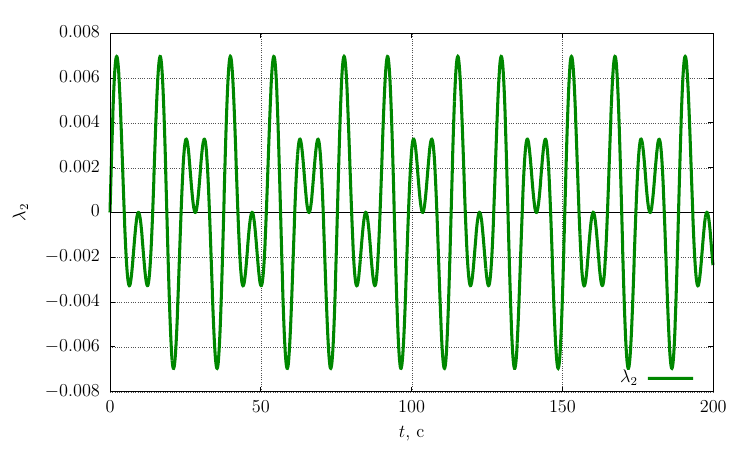
ロドリゲハミルトンの方向パラメーター
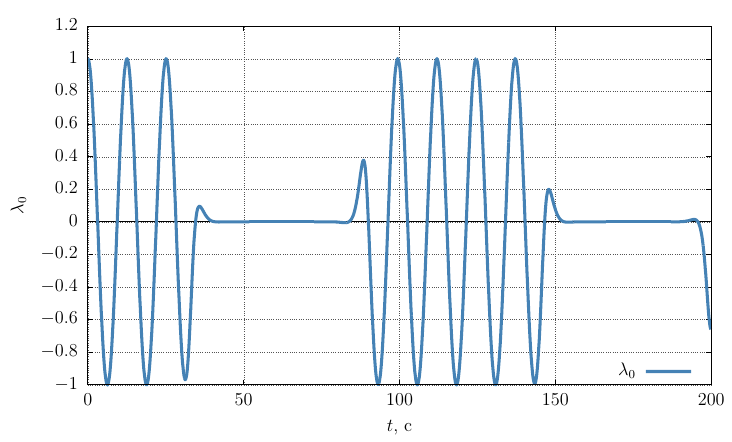
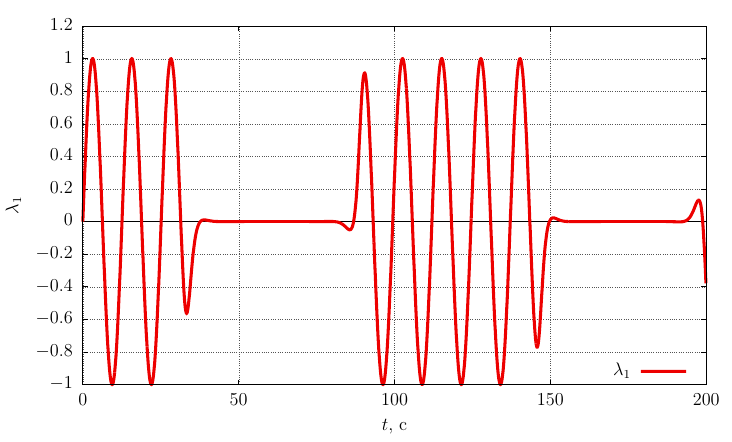
自身の軸上の角速度の投影
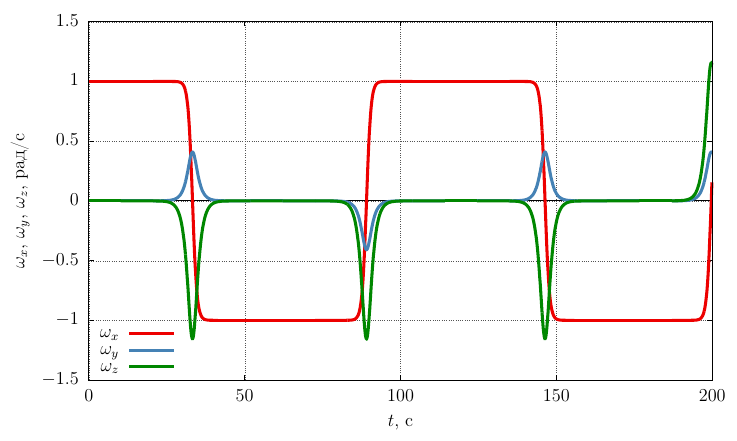
グラフは、
結果を、軸の周りにねじれた体の動きと、最大慣性モーメントで比較します。つまり、
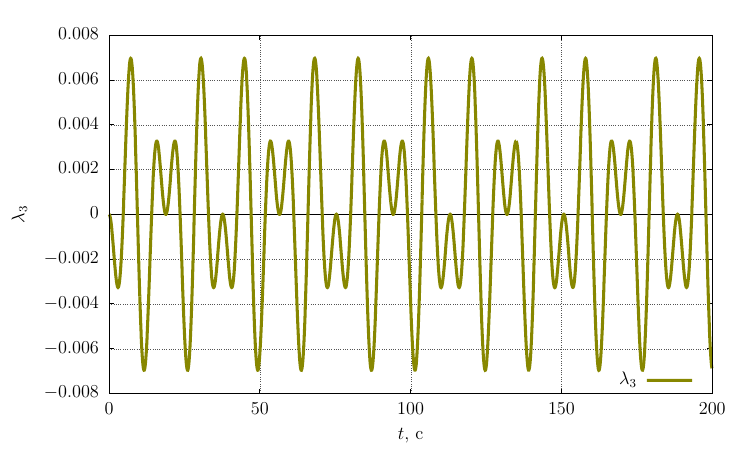
ロドリゲハミルトンの方向パラメーター
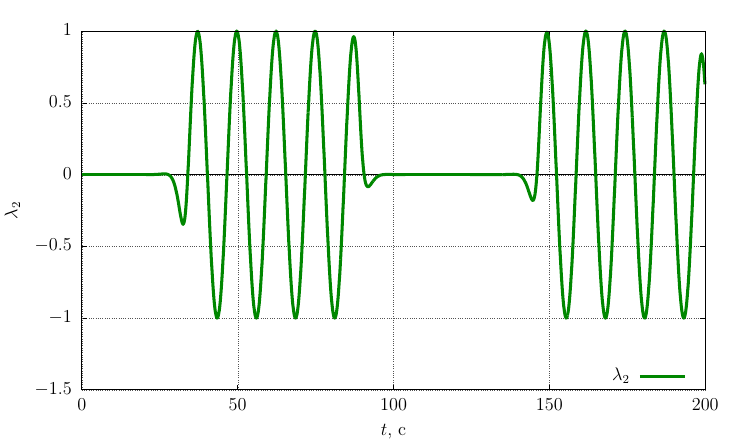
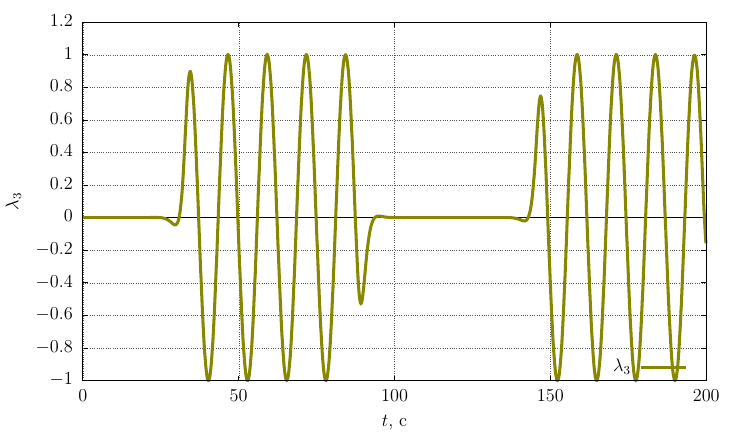
自身の軸上の角速度の投影
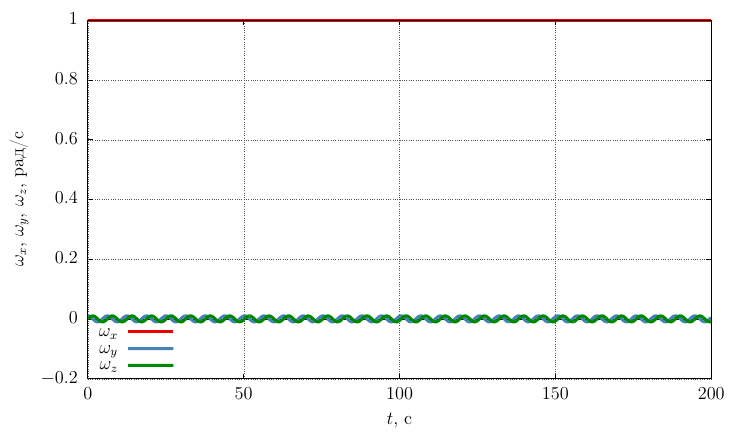
角速度の十分に大きな摂動により、運動は軸の周りの安定した回転のままであることがわかります。
同様の画像が、慣性モーメントが最小の軸の周りにねじれた物体に対して観察されます(
ロドリゲハミルトンの方向パラメーター
自身の軸上の角速度の投影
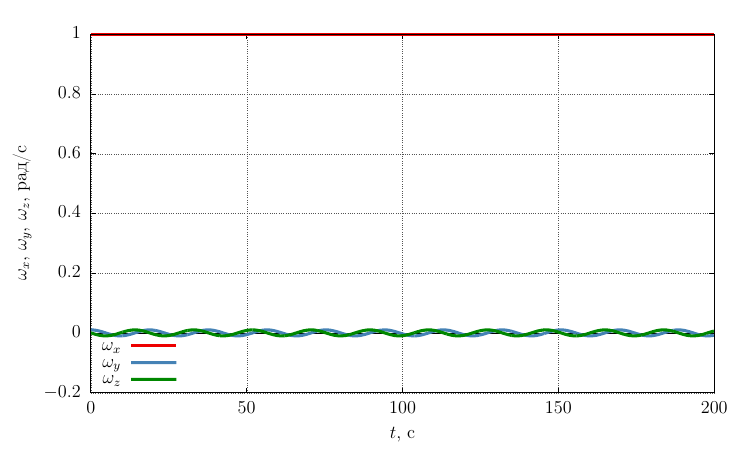
歳差振動数は、最大慣性モーメントを持つ軸を中心にねじる場合よりも大幅に低くなります。これは、ケースよりも大きな慣性モーメントを持つ軸を中心に振動が発生するためです。
おわりに
すべての計算は、著者がSKA Maple 18で実行しました。グラフは、Kile + LaTeX + gnuplotバンドルを使用して計算ログから作成されます。
私もアニメーションを作りたいと思っていますが、この問題に関する著者の経験は非常に少ないです。 したがって、読者に質問をしたいと思います-時間に応じて一連の方向の四元数パラメータの体の動きを示すアニメーションクリップを作成するために使用できるソフトウェア(Linux / Windows用)はありますか? これはBlender 3Dでできると思うが、よく分からない。
それまでの間、ご清聴ありがとうございました!
更新 :
謝辞
ただし、この記事(および以前の記事)は、 parpalakが開発したMarkdown&LaTeX Editor Webアプリケーションを使用して作成されたことを完全に忘れていました 。 このシステムでは、MakdownとLaTeXで記事を入力し、Habraエディターに直接挿入するのに適したコードを生成できます。 製品テストに参加してくれた著者に感謝します。 彼の許可を得て、私はこのシステムを記事の数学的テキストの作成に使用することをお勧めします
継続するには...