さらに熱心で、興味深く、一見シンプルなオプションを選択し、行動に移し、多くの場合、コピーして最初のロボットを作ります。 これは強い意志と非常に重要な決定です-主なことは、少なくとも自分で何かを始めることです! 製造プロセスでは、ある種のシュトゥケンティヤの注文/購入と思われるものまで、多くの技術的な調整があります。 そしてまだ-コネクタは正常にはんだ付けされません-ワンタッチビデオはどのように機能しますか? 作成プロセスはしばしば遅れますが、永続的な初心者のロボット工学は何らかの形で結果を終了し、少なくとも「直線で」意味のある最初の起動を行います。
そして、ロボットが完成すると、なぜすべてがこのようにその順序で正確に行われるのかを理解することになります。 作成プロセスは、すでに何らかの形で実現、形式化、およびペイントできます。 この瞬間から、次の第二世代のモデルの開発が始まります。
はい、以前興味のある記事も読みました。 そして今、私は読んだ! 私は特にヘリコプターに関する記事が好きです。地球から、空へ! しかし、正直に言うと、彼らは私の考えだけを呼び起こしました。 さらに、プログラミングを理解する必要があり、研究所でCと一緒に働いたとき、すべてが完全に忘れられていました。 Arduinoが何であるかは知っていますが、彼女のライブを見たことはありません。 などなど。 私は技術教育を受けており、FPGAのDSP問題に関与しています。 技術的には、私が把握して把握するのに障害はありませんが、実際には...私は仕事でこれをすべて行い、私にとっては、「屋根の上」と言うように、このすべてのビジネスがあります。 その結果、何らかの形でそれを開始するためには、何らかの良いインセンティブが必要でした。 刺激は、他の誰かがそれを必要としたときに現れました。真実は、本当の創造はあなたが他の人にそれを与えるときであると言われています。
私の仕事の性質を知っている、若い(私たちは焼きたての) エンデュランス会社の創設者の1人である私の良き友人は、いくつかの技術的な問題について私に連絡しました。 彼らはアメリカに開発者がおり、すでに超安い(arduinoに車輪が付いた電話+プラスチックプラットフォーム-安くてどこにもないように見える)テレプレゼンスロボットのプロトタイプをすでに発表していることが判明しました。 しかし、彼らはただ1つのマーケティングと「ここで販売された」ビジネスをやりたくはありませんでしたが、技術的なトピックをより詳細に掘り下げ、独自のモデルを開発することを望んでいました(原理と機能が同等であっても)ロシアでは、完成した結果だけでなく、その生産のための技術自体も取得するために。 これは謙虚な僕のこの件への参加の前提条件です(私は自分自身にヒントを与えます)。
最初は、記事も読んで、彼らがどこで何を買うのか、どうやってそれをするのかを見ました。 しかし、単一の写真はありませんでした。 一般に、すべてが明確であるように見えますが、同時に、すべてではありません。 コンピューターから管理する方法、コンピューターにビデオを配信する方法は明確ではありません。 さらに、私はソフトウェアエンジニアではないので、このソフトウェアのテーマを最初から「掘り下げ」たくはありませんが、もちろん興味深いでしょう。 どういうわけか、スクリプト言語AutoItを使用して、どういうわけかすべてのニーズをうまく満たしました。 検索の結果、私にとって重要な2つの重要なリソースが見つかりました。carduinoオンラインストアとサイバープレイスフォーラムです。 ストアでは、必要なすべてのコンポーネントを1か所で購入できます。
もちろん、価格はebayやaliと比較してワイルドですが、主なものはそうではありませんでした-プラットフォームとそれに必要なボディキット、そしてすべての小さなものを買うことができました。 そして、それはピックアップ/注文に便利でした。 フォーラムの「自分でできる」\「ロボティクス」および「自分でできる」\「CyberWrt」セクションでは、一般的な情報と、Wi-Fiを介したロボットとコンピューターの接続を詳細に整理する方法を見つけることができます。 専門分野での10年の経験が実感し、すぐに何かをコピー、ねじり、またはプログラミングし始める代わりに、私は鉛筆と紙を手に入れました...
「開発」とはどういう意味ですか? 「ロボットを作る」が何であるかは明らかです-あなたはそれを受け取って...それをします! そして、それを「開発」する方法は?
以下では、ロボットの作成ではなく、プロセス、つまり開発について説明しようとしました。 ロボットを構築物として作成することは、最初から直感的で直感的です。 それが作成されると、これ-それ、あれ-これはねじ込まれます。 彼はこのようにねじ込みました-突然、2番目の部分を別の方法でねじ込む必要があり、8番目の部分は手袋のように収まることが判明しました。バッテリーワイヤを左に5番目の部分の近くに移動する必要があります近くに10番目の詳細があるためです。 継続的な創造性。 大人として試してみましょう。最初に何をするかを考え、次にそれを行います:)
したがって、この記事で説明する内容は。 私はロボットをどのようにしたかについては書かないことにしました。そのような記事はたくさんあり、他の記事の外観には意味がありません。 私は、購入プラットフォームでセンサーをぶら下げて自分や他の人を喜ばせるためのおもちゃを作った最初の人でも10人目でもありません。 私は自分の思考技術を説明するために、いわば試してみることにしました。 ロボットを作ることはそれほど難しくないという事実だけでなく、ロボットをゼロから作成して試すことができる方法論を設定し、初心者のロボット工学では、作成の段階は最初は明確で理解しやすく、未知へと進む。
ロボット工学に関与したことがない人を想像してください。 彼には、はんだごての友人、マルチメーター、ワイヤーカッター、ドライバーなどの手工具があります。 自分を紹介しましたか? いいね! 行こう...
最初のステップは理解することです
何をしたいですか? そして、なぜこれが必要なのですか?
私にとって、この問題は最初に解決されました-Wi-Fiまたはインターネットを介してコンピューターに接続できるビデオカメラを備えたタイプライターを作成する必要があります。コンピューターでは、タイプライターから写真を見て、それを制御して移動します 理解できるように思えますが、どういうわけか退屈で、何かが欠けています。 リモートコントロール-それは何らかのロボットですか? ロボット? ロボットとは? ロボットは、それ自体で作業を行うある種の自律的なものです。 このタスクに適用する方法は? そして、マシンが自分自身に乗ってみましょう! そのため、問題の声明はありません-必要に応じて放してください。 しかし、彼女が好きなように乗るなら、彼女は物体と衝突します。 これはなんとなく悪いことです。 そのため、機械は前方を確認して障害物を回避し、衝突を防ぐことができなければなりません。 これをどのように行うことができますか? ビデオカメラからのデータを処理できます。 ええと...どういうわけか、これにアプローチする方法がまったく明確ではありません。 これはおそらく簡単ではありません。 他に何がありますか? あらゆる種類の赤外線およびレーザー距離計が販売されています! あなたはそれを買うことができ、どういうわけかそこから距離を得ることができます。 それはナンセンスですが、そこには何かがあります...
反射に基づいて、デバイスの概念であるアイデアが生まれます。 考察の結果は論文に要約され、簡潔に、本質を集中させるべきです。 次のデバイスを取得する必要があります。
-オペレーターのコマンドに従って、彼の前でビデオを放送する表面での移動方法を知っています。
-「存在」の自律モードがあります:任意の方向に独立して移動できます。
-あなたの前の状況を制御します。
-正面の物体を検出した場合、オペレーターのコマンドを無視したり、オフラインモードでの移動方向を変更したりすることはできません。
目的を決めたようです。 はんだごてを用意してテーブルに配置します。 あなたは布で包むことができます-それはより柔らかく、より快適になります。 状況に慣れさせてください。
第二段階-現実の研究
基本的な機能を決定し、何をする必要があるかが明らかになった後、疑問が生じます。それをどのように行うか、どのように見えるかです。
ハンマーを手に持ち、厳しい表情であなたの家を凝視し、テーブルカバー、車椅子、パンツからのゴムバンド、中国の棒、カーテンからの20センチメートルの生地、サンダルからのラッチ、部品用に分解したラップトップ-すべてを明確に宣言します進歩の名の下に私を渡します! 声に不必要な質問がないように、脅威と精神化の色合いを同時に与えることができます。 しかし、私はより効果的な方法を提案します。この目的のために、人々が作成した楽器は「インターネット」として理想的です。 私たちは、あなたの宗教があなたに使用を許可し、読み、見、聞き、掘り下げることを開始できる検索エンジンに「自分の手でロボット」という単語を入力します。 何かを思いつくことは、それを行う方法を思いつくよりもずっと簡単だからです。 さらに、合格することであなたはもっともっと面白いことがわかります!
したがって、この段階の結果は、最後の段階で思いついたもののタイプを決定する、より詳細な抽象リストになるはずです。 デバイスは次のようになります。
-2つのエンジンを備えた3輪プラットフォーム:2つの駆動輪、3つ目-バックアップとして。
-単三電池で駆動(1.2-1.3V x 4 =約5ボルト-エンジンに最適);
-デバイスはArduino Nanoマイクロコントローラーによって制御されます(エンジン制御-エンジンドライバーを介して、5Vからマイクロコントローラーに電力を供給できます)。
-超音波センサー(5V電源)を使用して範囲を決定します。
-フラッシュされたルーター(5V電源)はアクセスポイントとして機能し、Webサーバーに接続してマイクロコントローラーにコマンドを発行できます。一方、ルーターに接続されたWebカメラから画像にアクセスできます。
-2つのスイッチがデバイスにインストールされます:ON / OFF電源とON / OFF自律モード-これ以降、デバイスはありません。自律的に動作できるため、ロボットを意味します。
-ロボットには障害物が検出されたときに点灯するLEDが装備されています。
-ロボットの前面に2つの明るい白色LEDがあります-ライト-なぜですか:暗いときはロボットを怖がらせるべきではありませんが、明るい光では常にいくらか明るくなります。ここでの主なことは振り返らないことです-ビデオカメラは前方のみ。
-ウェブカメラはロボットにインストールされ、ルーターに接続されます。
私たちが提示したこの外観は、ロボット用のコンポーネントの市場を研究している間に受け取ったアイデアに基づいています。 ねじに対するロボットの詳細な表現はありません-ただし、一般的な機能のみが、結果がどうなるか想像できます。 一般的に、すべてをcarduinoストアで購入できるほか、ルーターを使用してロボットとの通信を整理し、サイバープレイスフォーラムで示されているとおりにセットアップできると結論付けています。 個々のコンポーネントを接続する複雑さを理解し、ルーターのプログラミング方法を理解していなかったまで。 しかし、彼らは、個々のコンポーネントを互いに(電気的および情報的に)接続できることを認識し、少なくとも構造と外観を決定しました。
ロボット部品
車輪、エンジン、ファスナーを備えたプラットフォーム:

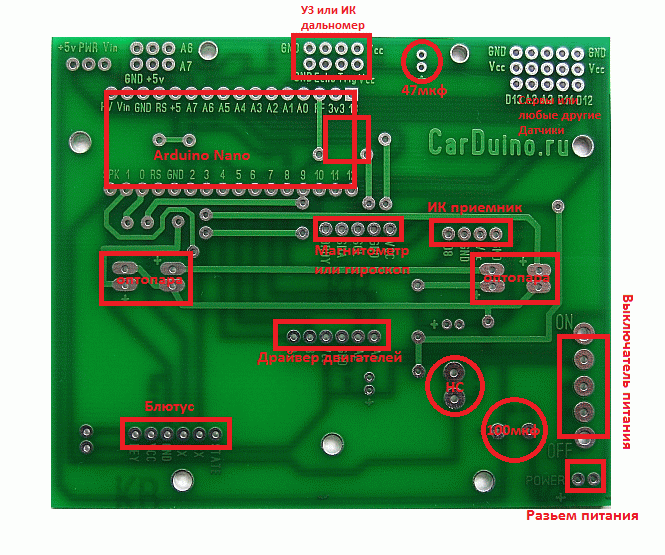
エレクトロニクス用ボード:

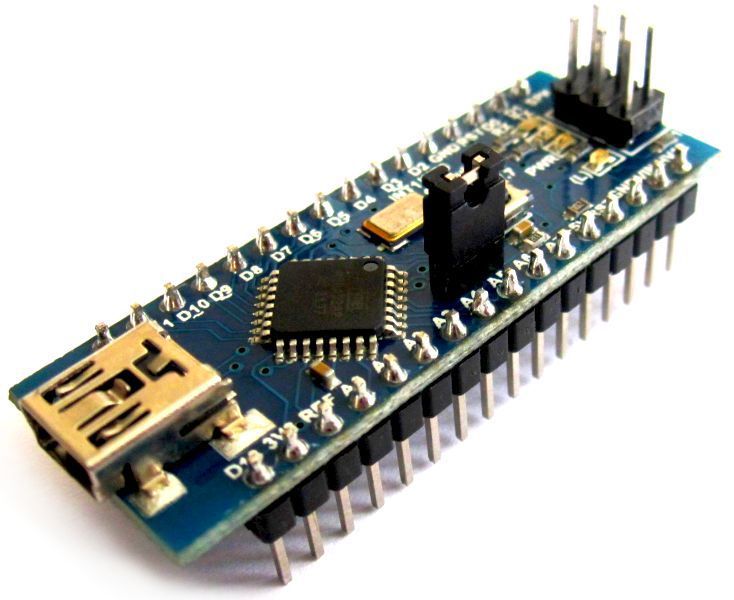
マイクロコントローラーCarduino Nano v.7:
超音波センサーHC-SR04:

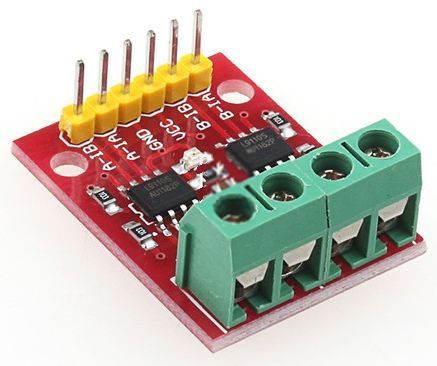
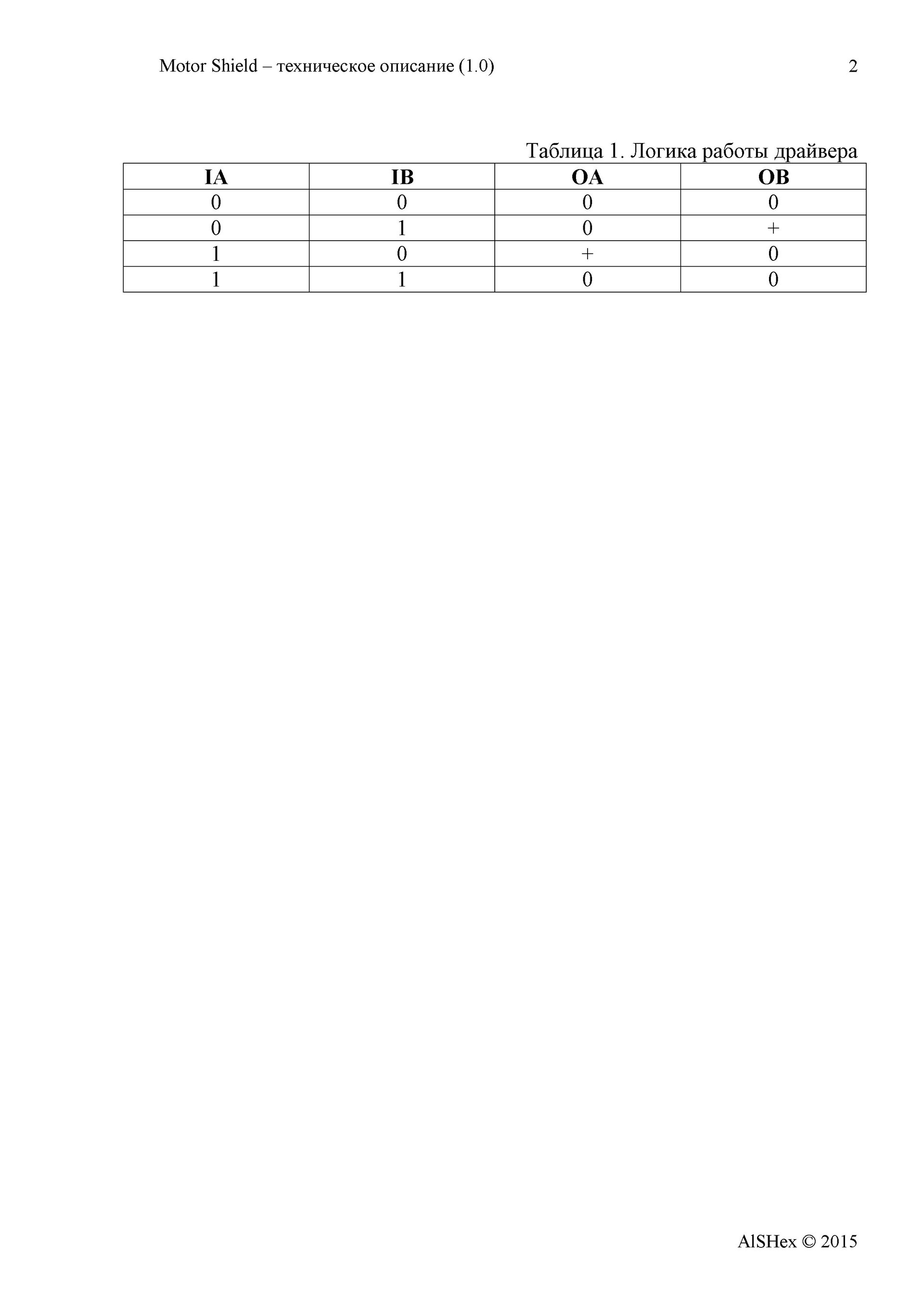
エンジン制御用ドライバー:
TP-Link MR3020ルーター:

ハブ(未知のモデルのコンパクトでミニチュアのハブ):

ウェブカメラ(Logitech C270):

エレクトロニクス用ボード:
マイクロコントローラーCarduino Nano v.7:
超音波センサーHC-SR04:
エンジン制御用ドライバー:
TP-Link MR3020ルーター:
ハブ(未知のモデルのコンパクトでミニチュアのハブ):
ウェブカメラ(Logitech C270):
はんだごてはテーブルの上にあり、上の写真に興味を持って見えます。 興味は明らかです-はんだ付けは彼のためにすべてです!
ステージ3-創造性:一般的な開発
多くの時間が費やされましたが、結果はまだ見えていません! 結果は、イメージと思考の形で私たちの頭の中にしかありません。 どういうわけか、これらの考えを具体化する必要がありますか? ロボットの外観がどのように見えるかは、すでにおおよそ理解できます。 コンポーネントのセットも定義されています。 どのように接続しますか? これらはすべてどのように互いに通信しますか? ロボット-これは電球ではありません-スイッチをフリックすると点灯しました。 それから彼はトグルスイッチをクリックし、電源が供給された-そして何? そして、ここで、親愛なる読者、開発は3つのコンポーネントに分岐し始めます:デザイン、電気、ソフトウェア。
完全に既製のものをすべて使用するため、このような完全な設計開発は行われません。 予見可能なすべての設計作業は、個々の箱を両面テープにうまく接着し、特別に指定された場所にボルトをねじ込むことで構成されます。 概して、そういうコンポーネントの組立図があるはずです。 しかし、プラットフォームやベースがない場合は、インストールされているすべてのコンポーネントの寸法を推定し、寸法を計算して、ベースボードのサイズ、他のロボットコンポーネントの取り付け方法などを理解する必要があります。 しかし、すべては私たちにとって単純であり、アセンブリ図面の役割はロボットの最終的なタイプの写真によって演じられるため、この開発の方向はこの記事ではまったく考慮されていません。
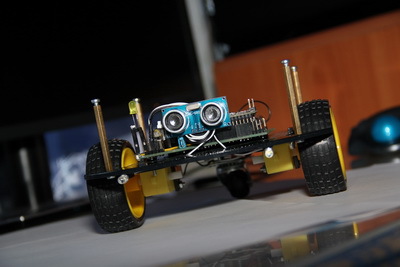
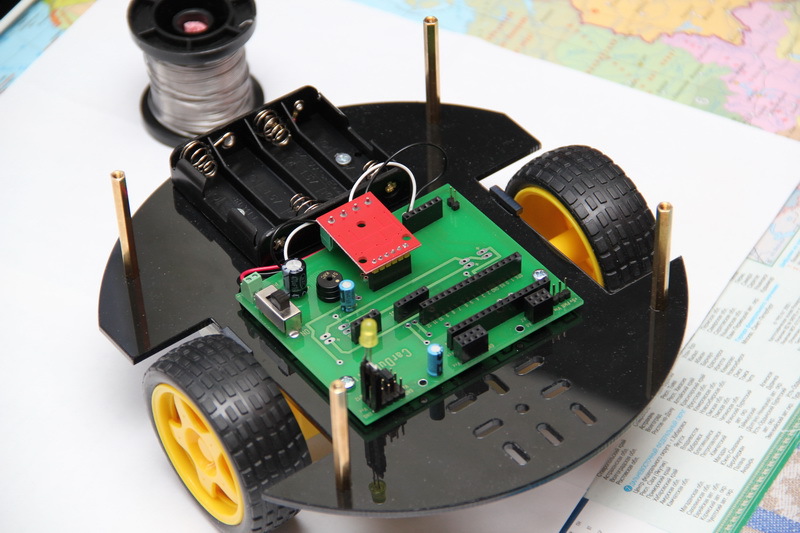
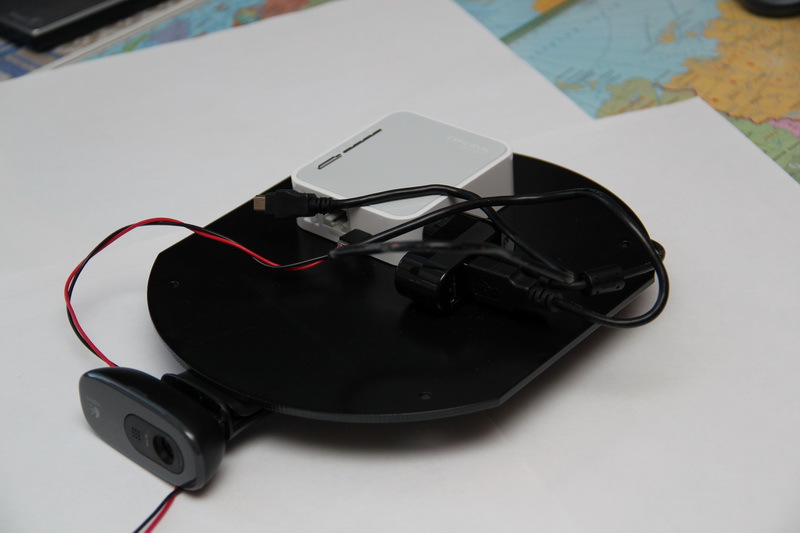
座って絵を描いた後、ロボットの次の機能的なフォームに移動できます。
写真の品質については事前に謝罪します。 たくさんの写真を撮りましたが、トラフィック量を減らしたくありませんでした。そのため、品質と音量の間で妥協することになりました。つまり、少し重くなりますが、読みやすく理解しやすいです。
写真には何が見えますか?
ロボットは、通信ユニットと制御ユニットの2つの独立した部分で構成されます。 通信ユニットは外部オペレーターと通信し、外部オペレーターからコマンドを受信し、それらを制御ユニットに発行します。 制御装置は、コマンドを受け取り、それらを実行します。 つまり、管理を2つのレベル-低レベル(プラットフォーム管理、センサーとの相互作用)と高レベル(低レベル部分のオペレーターとコマンド制御との相互作用)に分割しました。 管理タスクは2つの部分に分かれており、個別に解決できます。まず、Arduinoマイクロコントローラーの形で動くプラットフォームを扱い、次に再構成されたルーターの形で通信します。
通信ユニット。
1)電気工学。 ここでは、すべてが一般的に明らかであるように見えます。カメラはビデオと音声を提供し、ハブを介してルーターに接続します。 Arduinoもハブを介して接続します。 ケーブルをUSBコネクタに接続するのはあまり賢明ではありません。間違える可能性は十分に小さく、逆も同様です。一部の人はこの可能性を十分に持っていますが、これは私たちについてではありません!!! 挿入する場所を見て、登らない場合は、強く押します-ぴったり収まるはずです、USBです!
2)プログラミング。 ルーター用の既製のファームウェアとロボット用の既製のモジュールが使用されるため、ここでの開発はありません。 コントロールユニットとのインターフェイスプロトコルは既に決定されています-あなたもそれを把握する必要があります。 どのように正確にフラッシュし、そこで何を正確に構成するか-後でそれを理解します。
コントロールユニット。
1)電気工学。 すべてが明らかなようです。 マザーボードにはすべてがはんだ付けされています。 センサーがArduinoに接続されている場所を把握する必要があるだけで、同時にどこでも不要な作業を行わないため、地面が電源と混同されます。 接続の観点からは、特別な問題はないようです。 確かに、ボードとの接続先をすぐに把握することはできませんが、マスターの作品を見て、下の写真を見つけた後、すべてが適切に配置されます。 どのように、そして何が離婚されたのか-そして、私たちはそれを理解します、誰もファイルルールをキャンセルしません:何かがあれば、それを終了します!
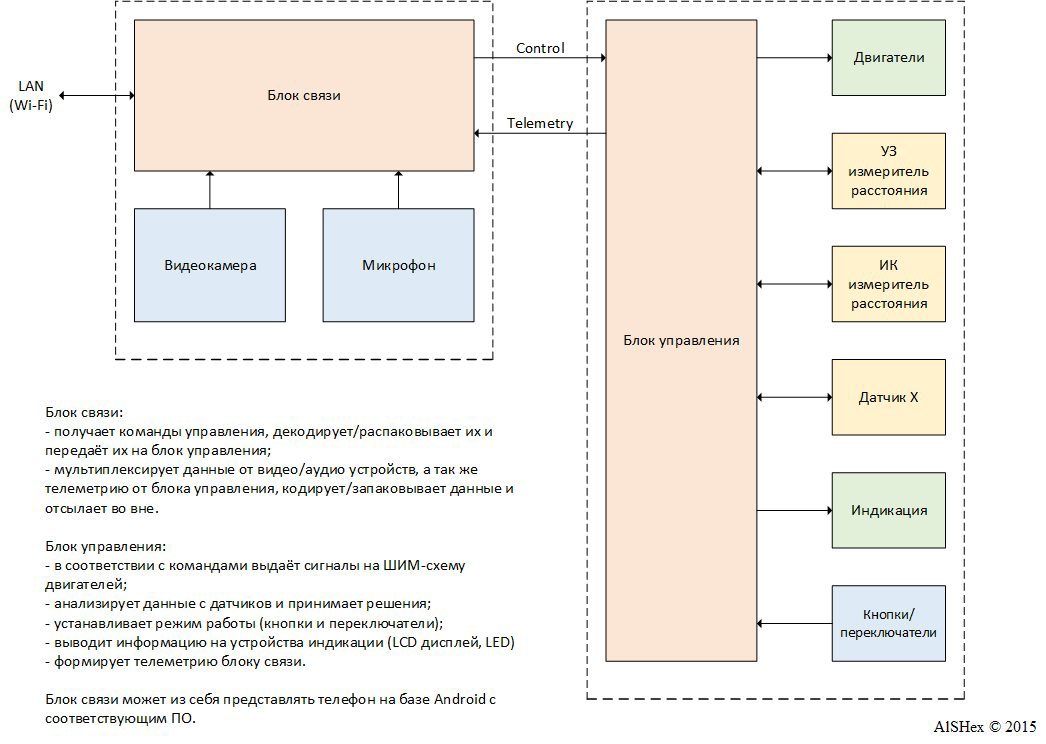
2)プログラミング。 そして、ここに問題があります。 そこでどのように、何をすべきか。 ここにチームが来ました。 どうする 私たちは再び紙と鉛筆を取り、描画します。 その結果、次の機能的なソフトウェアスキームを取得できます(プラットフォームのみ)。

次の正方形が判明した。 しかし現在、これらは純粋にソフトウェアモジュールです。 感じることも触れることもできないもののある種の具体化ですが、それは、ロボットがこの抽象化のレベルの論理に基づいて動くためです。
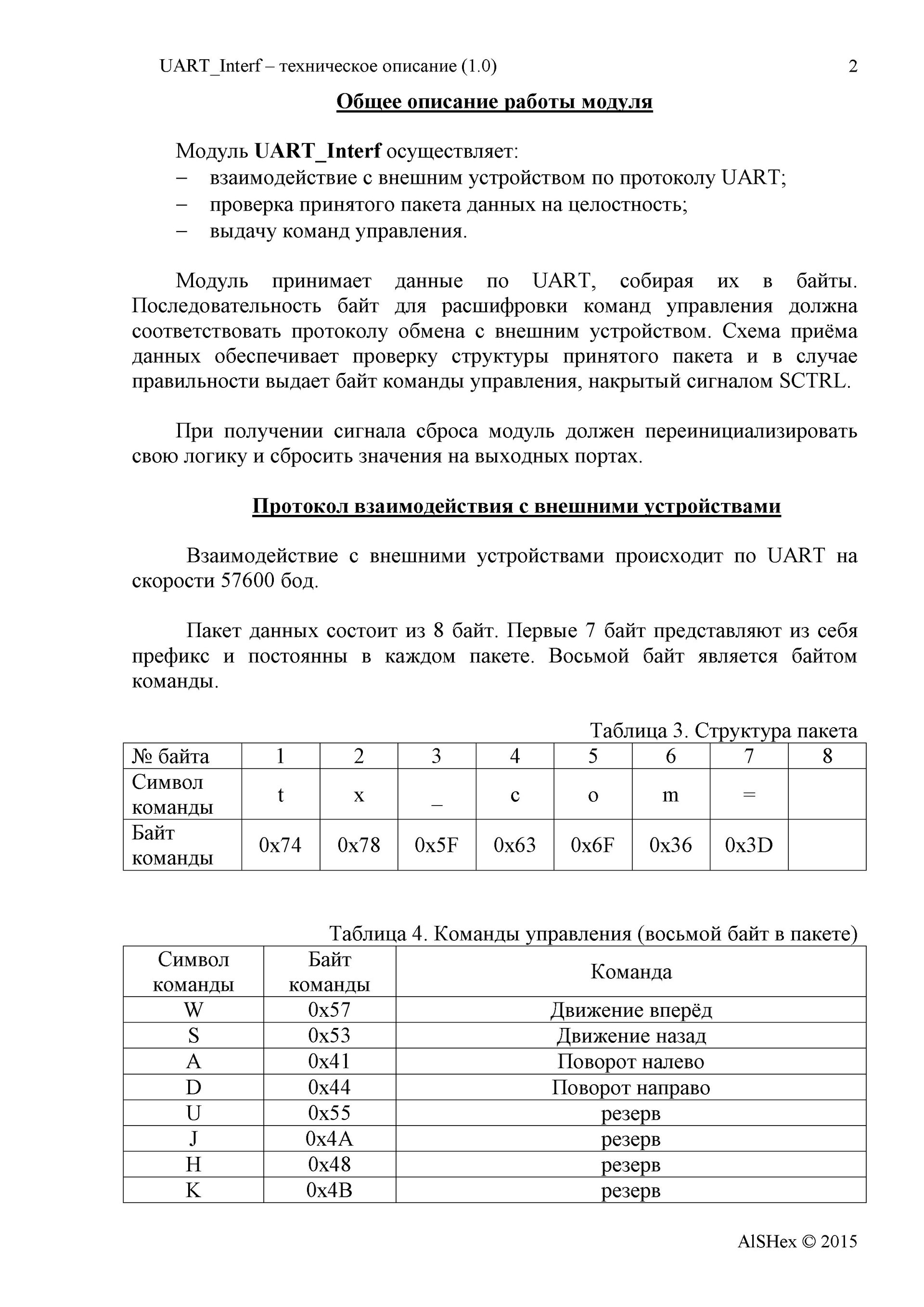
コマンドは、インターフェイスモジュールで受け入れられる必要があります。 着信データが理にかなっていること、これが干渉や誤ったコマンドではないことを認識しなければならないのは彼です。 コマンドを識別する場合、モジュールは制御モジュールにどのようなコマンドが届いたかを通知する必要があります。 コマンド制御モジュールは、いくつかのアクションを実行する必要があります-移動を開始、停止、前方に障害物があるかどうかを「見る」、ライトをオンにする、またはオフにするなど。
自律モードボタンが押された場合、制御モジュールは前方に障害物があるかどうかを判断し、モーターモジュールに適切なコマンドを発行して前進し、障害物がある場合は何らかのアクションを実行する必要があります。 エンドデバイスを直接制御する機能は、複雑さのレベルに基づいて他のモジュールに部分的に委任されます。 制御モジュールは、エンジンを前進させるために、前進が可能かどうかを知る必要があります。 ほとんどの場合、そのように、超音波センサーからデータを取得することはできません-なぜこれを行う必要があるのでしょうか? 命令方法は知っているだけです-センサーを操作するためのソナーモジュールがあります! そしてここで、ロボットの前の動作状況に関するレポートを求めています。先に進むことができますか?
はんだごてがぼろぼろになって、ぼんやりと見えないように出てきて、興味を持ってソケットを見つめていました。110ボルトか220ボルトか。
第4段階-創造性:詳細な開発
何をどのように行うかは理解できます。 何から明らかです。 これがどのように機能し、どのように見えるかは明確です。 時間だ! 何かを始めましょう! 非常に多くの人が、読み、見、評価し、考え、発明し、拒否し、塗りました。 ええと...そこに、はんだごてが近くにあります。 彼は私たちを見ています。 彼は困惑している-それは取ると支払うように見える、なぜ私はゴミをする必要がありますか? 私たちはため息をつき、はんだごてを一枚の紙で覆います。今すぐ眠りましょう、すべてが準備できているわけではありません。 すべてが機能する様子を理解するだけでは十分ではありません。すべてが構造的に見える様子を理解する必要があります。 理解を最大限にする必要があります。
通信ユニット。
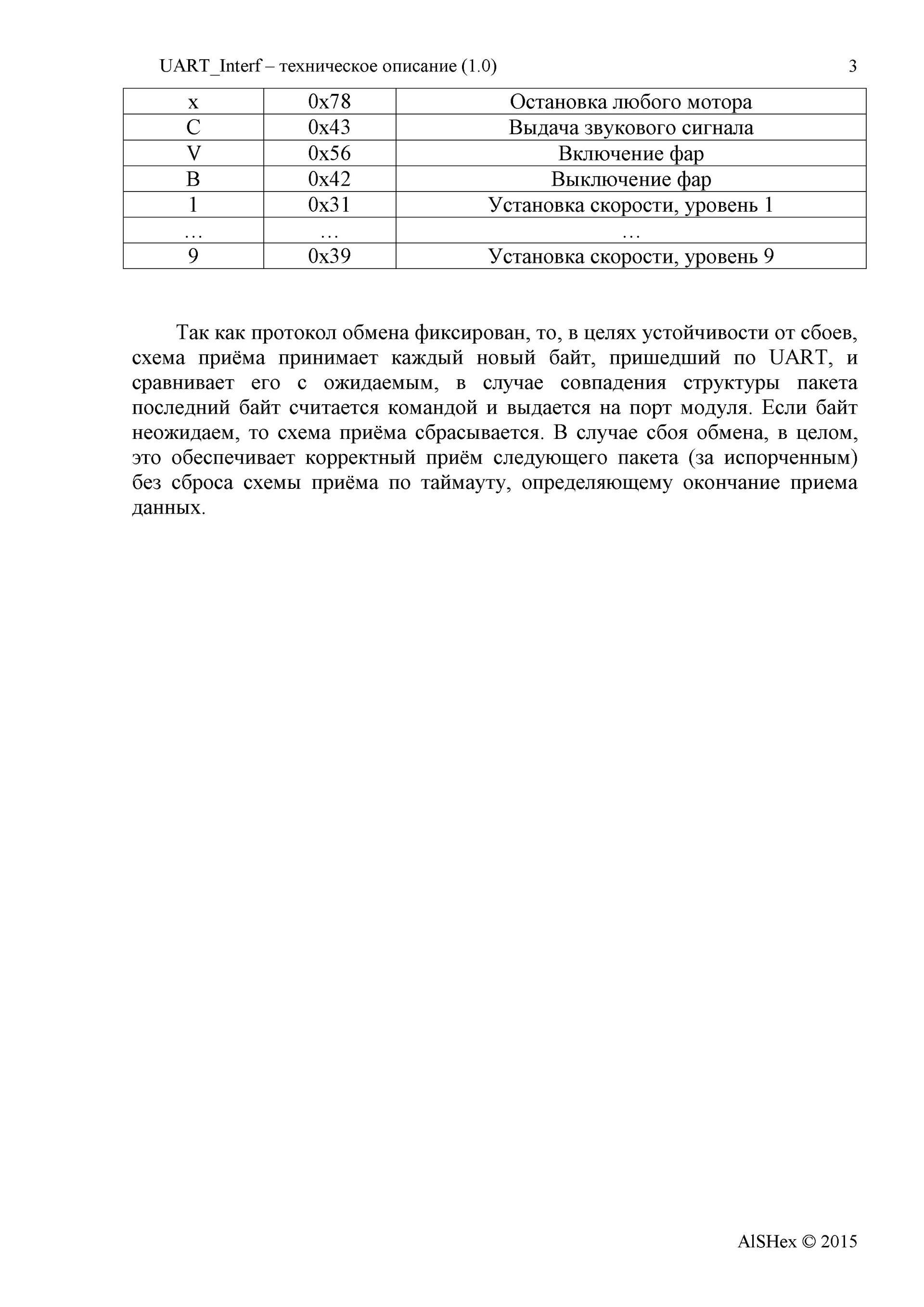
ほとんどすべてが最終段階で発見されました。 すべてが明確です。 サイバープレイスフォーラムでは、 このトピックに精通し、TP-Link MR3020ルーターを再フラッシュして構成する方法を理解します。 ルーターのファームウェアをダウンロードします。 どこにどのIPを入力し、何を、どこにクリックするかを記述したファイルを作成します。唯一の問題は、どのコマンドがマイクロコントローラーに送信されるかが明確でないことです。フォーラムに座って、読書とチャットをした後、すべてが明確になりました(私に答えて助けてくれたすべての人に感謝します)。すべてのコマンドを同じテキストファイルに記述し、どのチームが何を担当しているかをマークします。すべてがシンプルであることが判明しました。たとえば、「進む」などのボタンが押されると、ASCIIコードの特定の行が送信され、ボタンが解放されると、「停止」(以下のバイトが送信されます)というコマンドが発行されます。
コントロールユニット。
前の段階で、制御ユニットに正確に接続するものを決定しました。コントロールユニットの中心はArduino nanoです。これは何ですかそれらの電球とこれらのコネクタは何に責任がありますか?ソナーの脚に関連する結論は何ですか?とにかく:ソナーと通信する方法は?
コンポーネントに関する情報を一生懸命勉強し始めます。幸いなことに、インターネットがあれば図書館に行く必要はありません。使用するコンポーネントの技術的な説明を作成します。ロシア語のリソースで、どのようなボードが機能するかを読んでメモを取ることができます。エンドデバイスとの接続方法とエンドデバイスの操作方法を理解するために、彼らはすべてが非常に簡潔で明確で理解可能な独自の「データシート」を作成します。メーカーの英語のデータシートを調べるだけで十分な場合もありますが、中国語またはデータシート自体が非常に膨大である場合があります(そのように200ページ)ので、短いメモを作成することをお勧めします。
私たちはマイクロコントローラーで「ヘルプ」を作成します。
Carduino nano v。7 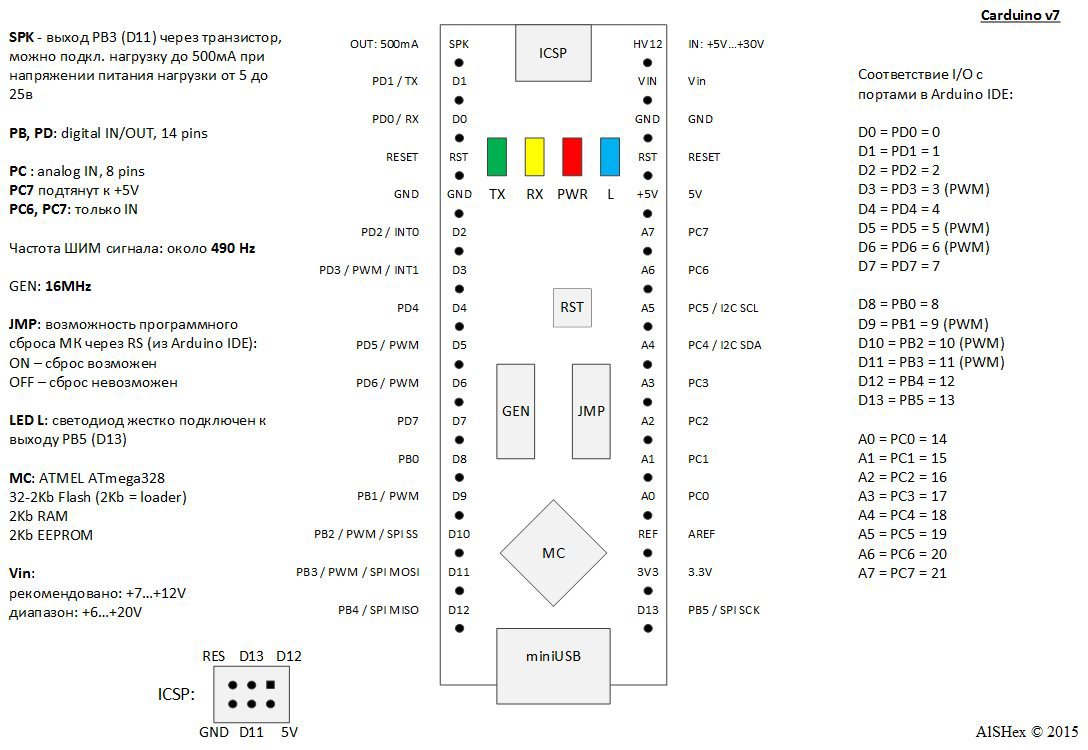
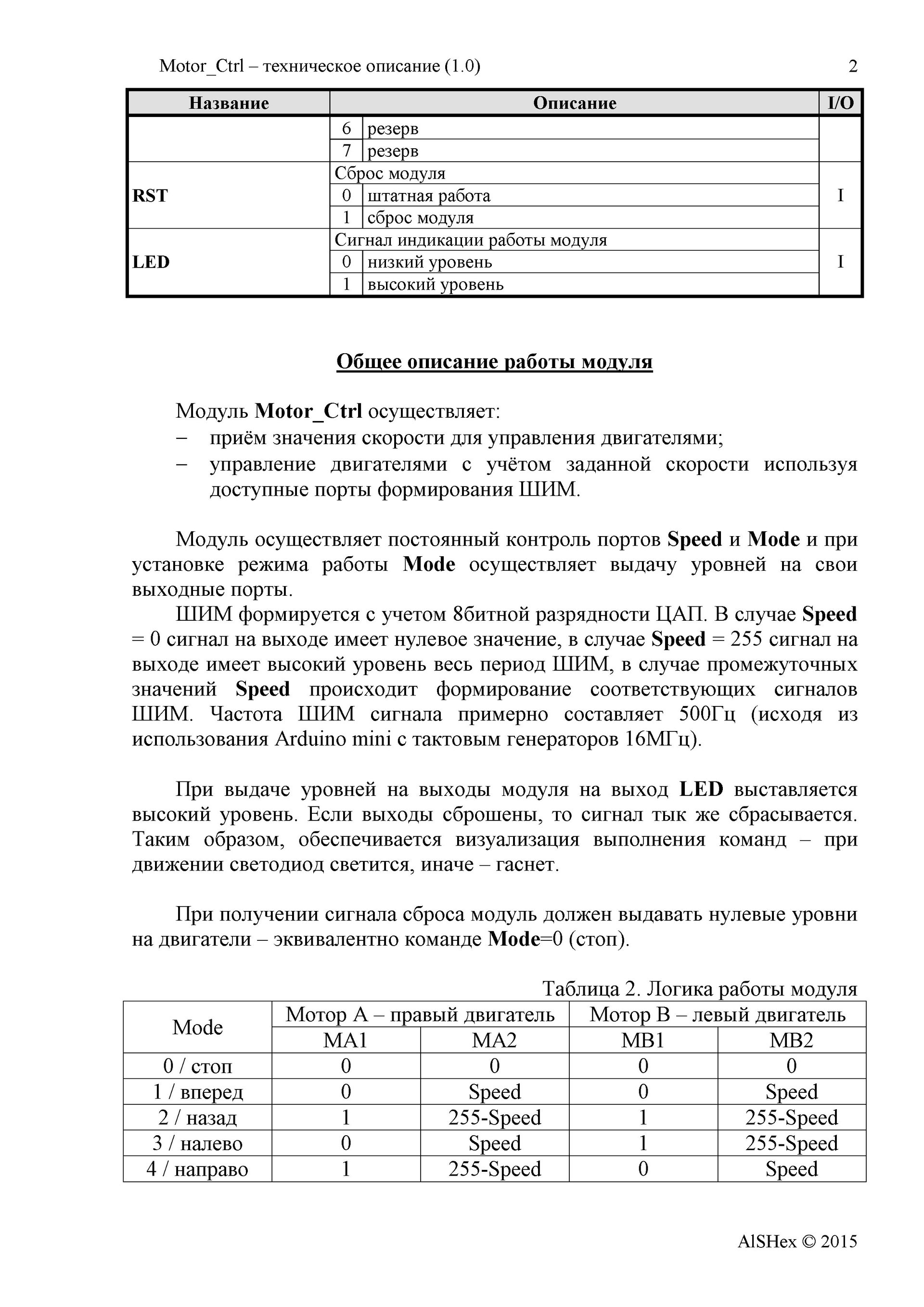
次に、周辺機器がどのように接続され制御されるかを理解します。エンジンドライバー:
L9110Sチップに基づくエンジンドライバー 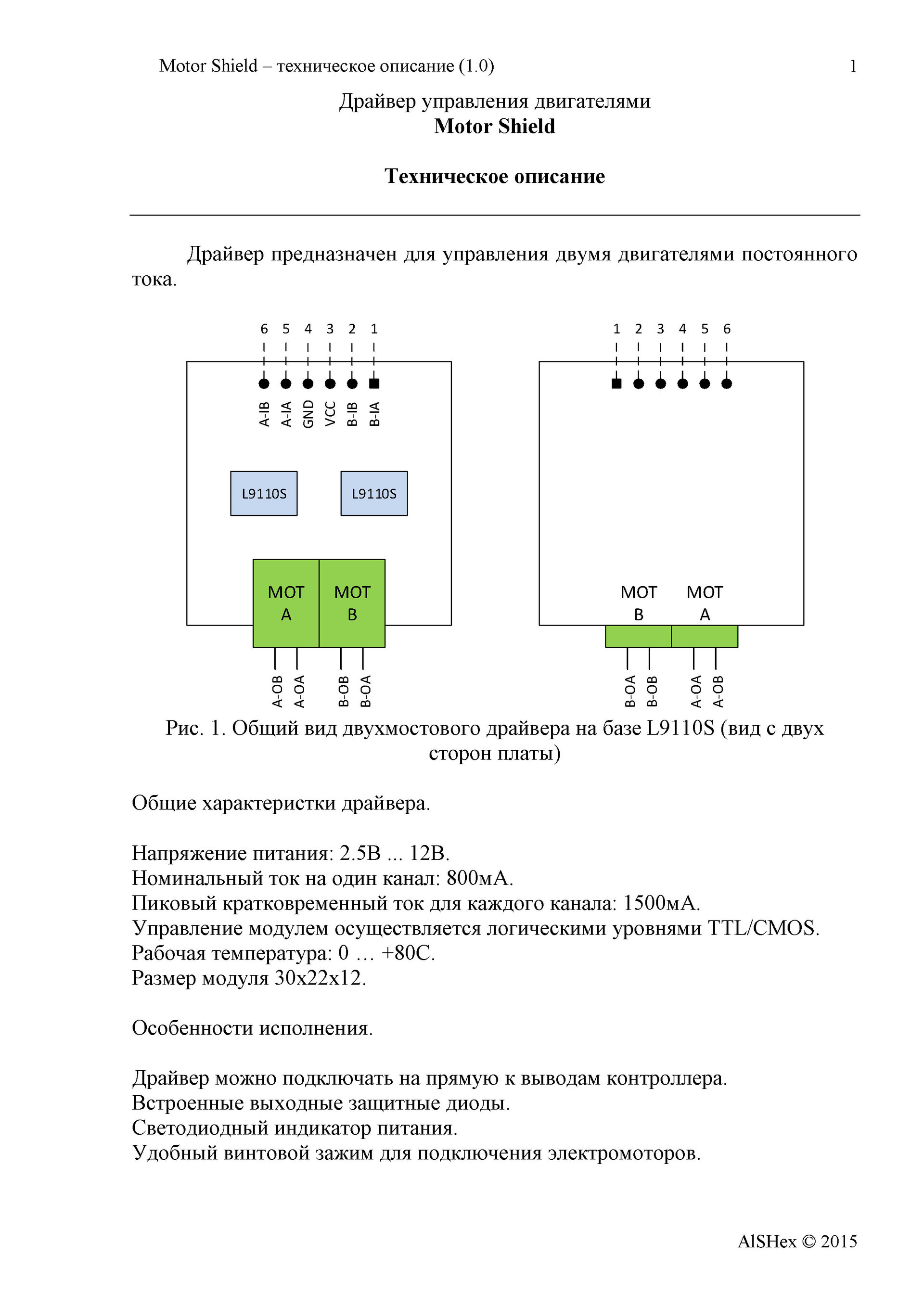
超音波センサー:
ソナーHC-SR04 

このすべての理解の後に、ソフトウェアモジュールの接続のブロック図が描かれます。これは、それらとの相互作用を反映し、何がどこに接続されているか(マイクロコントローラーのどのレッグに)に関する情報を含みます。

この図を描くには精神的な努力が必要です-結局、フレームワークは基本的に設定され、その上にコードが配置されます。ここで、発言する必要があります。実際、私はFPGAを開発しているため、最初はFPGAの場合と同じように構造をペイントしました。SIのようなプログラミングの場合、回路上の信号の数は実際には冗長であることが理解されるべきです。しかし、その後、プラットフォームの独立性が得られます。FPGAですべてを試すことができ、さらにオプションがあります。
この図を左から右に読みましょう。 UARTインターフェイスモジュールはデータを受信します。データがコマンドの場合、SCTRLパルスストローブの下のCTRL制御バイトを制御モジュールに発行します。ストロボを受信した制御モジュールは、何らかのコマンドが到着したことを理解し、CTRL入力を読み取り、コマンドを実行します。 「forward」コマンドが来たとしましょう。出力信号はパルス信号Get_Distであり、距離データはDist入力で期待されます。原則として、Get_Distパルスを常に受信することは禁止されていません。この場合、必要なときにDist入力ポートから範囲値を取得するだけです。レンジですべてが大丈夫だとしましょう-障害物はまだ遠くにあり、あなたはそよ風に乗ることができます。モードバスを介してモーター制御モジュールに信号が発行され、所定の速度で前進する必要があることを示します。範囲を測定し、対応するLEDに移動すると、動作を示し、システムで何が起こっているかを理解するために、高レベル(論理ユニット)も発行されます(デバッグ時に役立ちます)。
モジュール方式があります!頭が整いました!方法と内容は明らかです。次に、これを説明する必要があります-各モジュールが何をすべきか、どのような条件の下で。
インターフェースモジュール: 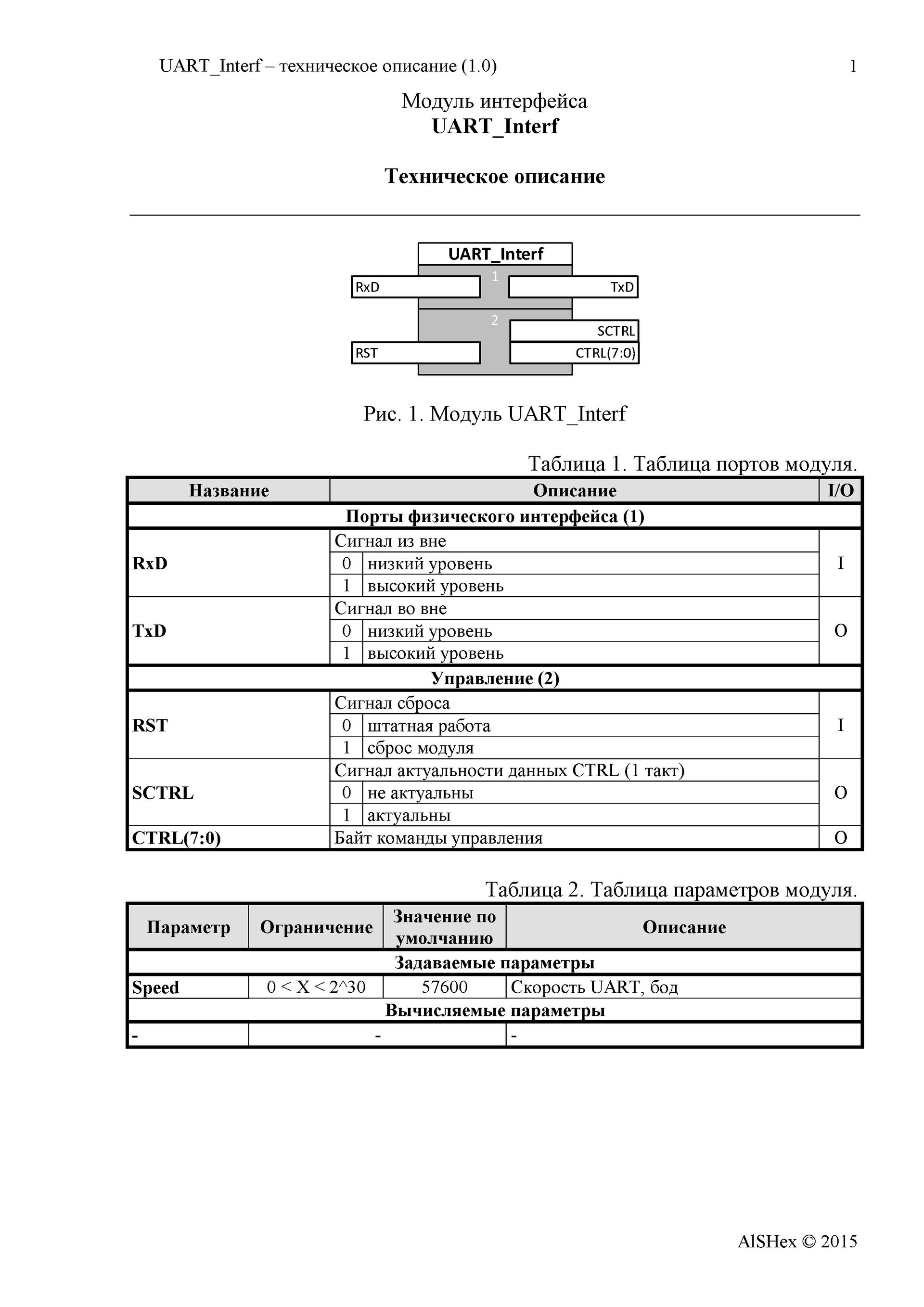
制御モジュール: 


距離測定モジュール: 


エンジン制御モジュール: 
はんだごてからのプラグが付いている尾はテーブルのコーナーのまわりのシートの端の下から落ちた。葉が少し滑り、銃口が開いた。はんだごては、「神殿の周りに指をねじる」というジェスチャーさえ必要としない表現で見えます:「TKは自分自身に書きます-なんと異端...ここで私は所有者と「幸運」ですが、」彼は悲しげに考え、電源プラグを静かにテーブルで振った。
第5段階-作成
開発はほぼ完了しました。すべての瞬間が限界まで明らかにされています。それは奇跡を生み出すために残っています-スペアパーツのこの山と、写真、プレート、図、図を含む小さなリーフレットの山から、すべてが始まったものを集めるために。
悲しいはんだごてをつかんで、コンセントに差し込みます。私たちがスポンジで刺し傷をきれいにした瞬間に、彼は喜び、ヒスを浴び始めます。はんだを含むフラックスは、テーブル上での友好的なラウンドダンスによって導かれます。太陽は窓の外を見て、ボード上のスポットはんだ付けスポットSMD抵抗器を強調しています。ゆっくりはんだ付けすると寿命が長くなります!


誰もが無関心になることのない、最も楽しくて面白い開発段階。ここで、私たちの目の前で、私たちは誰にとっても明白な、何か面白いものを手に入れます。タブレットである種の絵を描くことは観察者にとって面白くないだけでなく、それがどのように発生するかを心から理解できないため、この段階は以前のものと対照的です。そして...最初のロボットがテーブルの最初の1センチを通過し、手のひらでテーブルの端をブロックしたからといって、丁度20センチの端から止まるのはとてもクールです。賢い生き物が判明-これ以上先に進むことができないことを理解しています!


この段階で、機械構造全体を組み立て、ワイヤをはんだ付けし、マイクロコントローラをプログラムします。何が起こったかをテストします。分かりません 思う。TKを修正します。実際には、実際に書かれて発明されたものとはまったく異なる方法で判明するからです。再び議会に戻ります。テスト中です。分かりません 失意しないでください。マルチメーターで突いて、放電したバッテリーを交換します。喜ぶ...


厳密に言えば、この段階の最後に、上記のドキュメントとともに結果の再現性を保証するリストを作成する必要があります。上記の大きなコンポーネントを引用しましたが、注文時に必要な「ルースパウダー」も入れるように頼みました:電源スイッチ、バッテリーコンパートメントを接続するためのコネクター、コネクターパッド2.54mm ...

さらに、ワイヤ、はんだ、フラックス、工具などの消耗品が作業に使用されました。技術的なニュアンスがある場合、それらにも注意を払う必要があります。

プログラムを2回書いた。
最初に書かれたとおりに書かれたとき。私は積極的にサイトarduino.ruを読みました。私はもうプログラムを書きませんでしたが、構文を理解し、Cを思い出し、プログラムコード実行のシーケンスで絶えず誓いました(すべての計算ブロックがクロック/ループで動作するとき、 1行のみが処理されます)。
2回目は、厳密に構造的にプログラムの組織に行きました。これは常に正当化されたわけではありませんが、元のスタイルを設定する場合は、それに従う必要があります。要点は...上記のソフトウェアモデルの構造をコード内で繰り返すことです。コードでは、最初にすべての変数を宣言し、定数を構成します。次に、初期化ブロック「void setup」に従います。そして、メインサイクル「ボイドループ」が続きます。そのタスクは、モジュールを継続的にポーリングすることです。各モジュールには、その動作に影響する独自の入力変数と出力変数があります。メインループでは、これらの変数が管理されます。
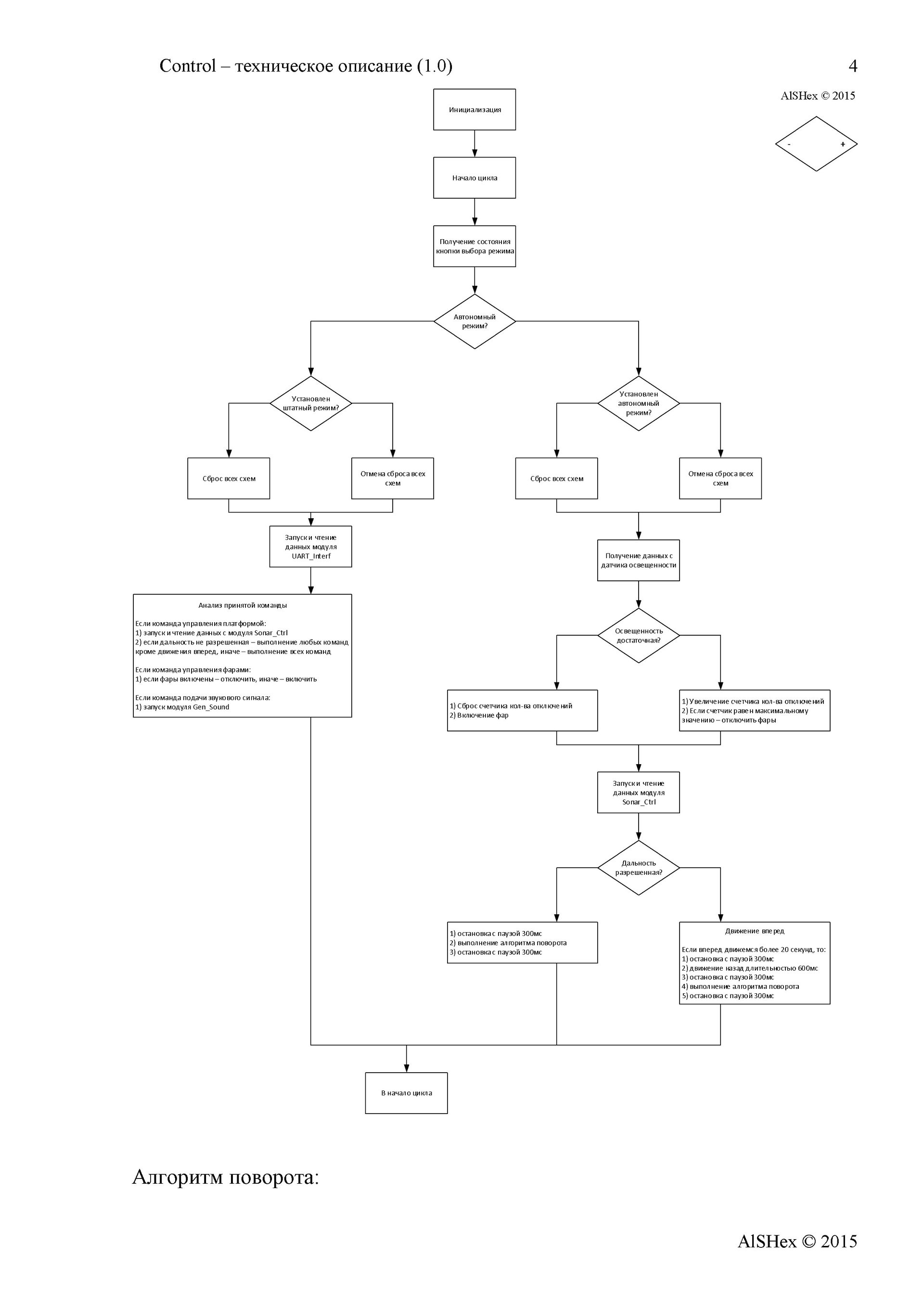
問い合わせボタンは、すべてのモジュールの動作モードを設定します。インターフェイスを介してコマンドを受信した場合、オフラインモードが有効になっていないと、コマンドは他の制御モジュールに送信されます。最初は、モーター制御とライトの2つのモジュールしかありませんでした。その後、サウンド生成モジュールが登場しましたが、それを作成する時間はありませんでした。ここで、影響を受けたレイアウト構造-モジュールの追加/除外は簡単で明確です:変数宣言のブロック、初期化の行、メインループの行、モジュール自体のコード。範囲決定モジュールと回転アルゴリズムを実装するモジュールは、必要に応じて他のモジュールから呼び出されます。
プログラムテキスト
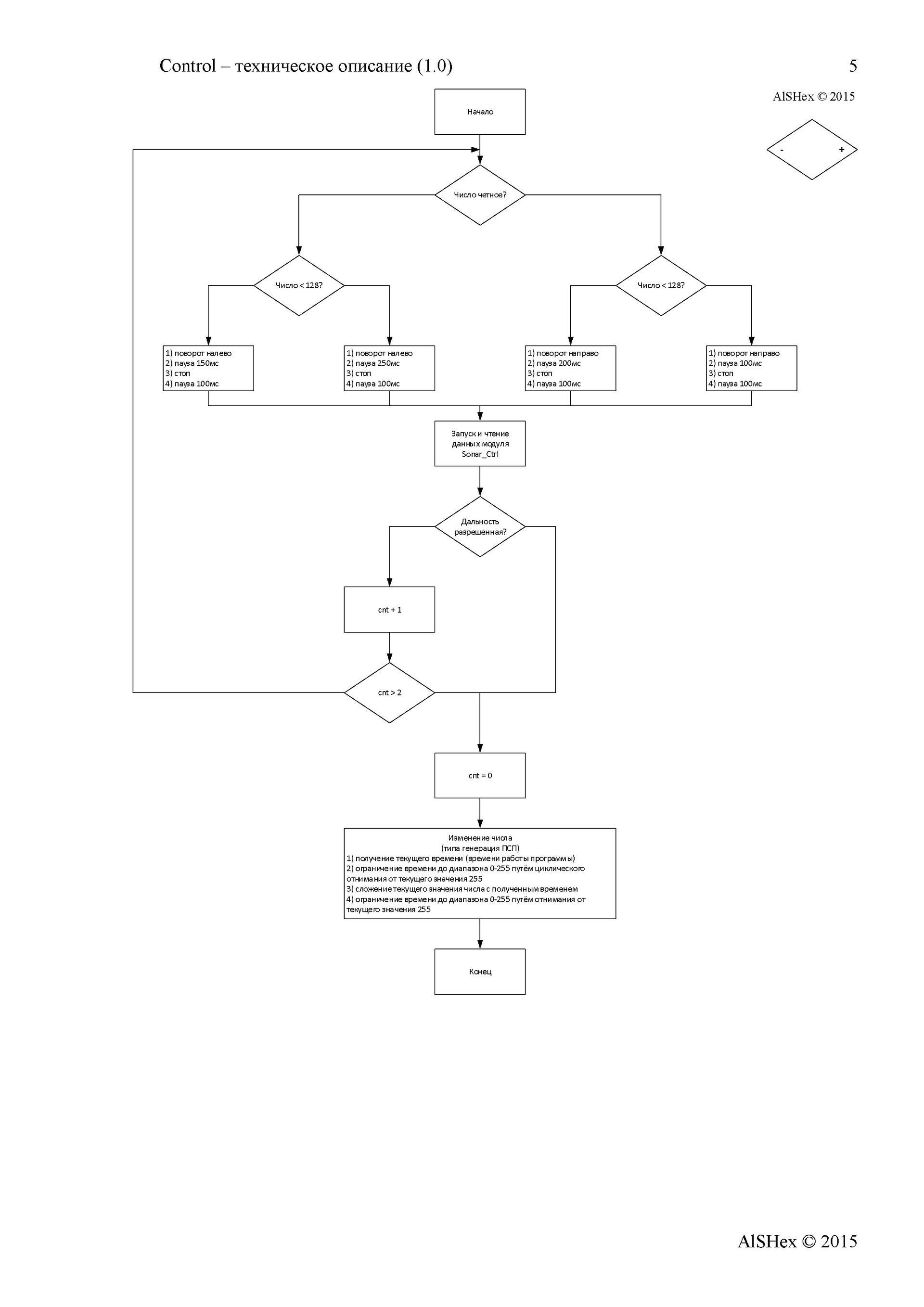
////////////////////////////////////////////////////////////////////////////////////////////////////////// // Robot Platform RASH 1 AlSHex // 1.0 // // Create: 23/03/2015 // Modification: 11/04/2015 // // Description: RASH 1 // ////////////////////////////////////////////////////////////////////////////////////////////////////////// // const int LEDtech = 13; // const int LEDdist = 3; // const int Sonar_t = 14; // const int Sonar_r = 15; // const int Mode = 16; // - : =0 - ; 1= const int MB1 = 4; // - digital const int MB2 = 5; // - pwm const int MA1 = 6; // - pwm const int MA2 = 7; // - digital const int HDL = 17; // const int SPK = 11; // //const int LGHT = ; // // const long UART_Speed = 9600; // UART // const int D1 = 20; // const int D2 = 110; const float A = 2.5; const float B = 305; // const byte Byte_forward = byte('W'); //: const byte Byte_back = byte('S'); //: const byte Byte_left = byte('A'); //: const byte Byte_right = byte('D'); //: const byte Byte_stop = byte('x'); //: const byte Byte_sound = byte('C'); //: / const byte Byte_light = byte('V'); //: const int Dist_min = 40; // , [] const int Cycle_lightoff = 1000; //- const int Speed_default = 255; // , , // const int Delay_prog = 10; // , [] const int M_stop = 0; // ( ) const int M_forward = 1; const int M_back = 2; const int M_left = 3; const int M_right = 4; // - //========== Interface ========== void _UART_Interf(unsigned int RST, unsigned int *Data); // : Data[0]=1 - ; Data[1] - //RST - : 0= ; 1= //Data - : Data[0]=1 - ; Data[1] - // // UART Serial //========== Motor ========== void _Motor(unsigned int RST, unsigned int Mode, unsigned int Speed); //RST - : 0= ; 1= //Mode - : 0= ; 1= ; 2= ; 3= ; 4= //Speed: - , : 0= ; 255= // //MA1, MA2, MB1, MB2 - , MB1 MA2 - , MB2 MA1 - (0/255) //LEDtech - , "" //========== Sonar ========== unsigned int _Sonar(unsigned int RST); //RST - : 0= ; 1= // //Sonar_t - Trig //Sonar_r - Echo //LEDdist - (0/255) , - - , //========== Control Motor ========== void _ControlM(unsigned int RST, unsigned int SCTRL, unsigned int DCTRL, unsigned int Mode); //RST - : 0= ; 1= //SCTRL - DCTRL: 0= ; 1= //DCTRL - () //Mode - : 0= ; 1= // // Sonar, Motor Rotate //LEDtech - , 1 //========== Control Light ========== void _ControlL(unsigned int RST, unsigned int SCTRL, unsigned int DCTRL, unsigned int Mode); //RST - : 0= ; 1= //SCTRL - DCTRL: 0= ; 1= //DCTRL - () //Mode - : 0= ; 1= // //HDL - : 0= ; 1= //========== Control Sound ========== void _ControlS(unsigned int RST, unsigned int SCTRL, unsigned int DCTRL, unsigned int Mode); //RST - : 0= ; 1= //SCTRL - DCTRL: 0= ; 1= //DCTRL - () //Mode - : 0= ; 1= // //SPK - (0/255) //========== Rotate ========== - , ControlM void _Rotate(unsigned int RST, unsigned int Speed); //RST - : 0= ; 1= //Speed: - , : 0= ; 255= // unsigned int CMD[2] = {0,0}; // : CMD[0]=1 - ; CMD[1] - unsigned int CTRL[8] = {0,0,0,0,0,0,0,0}; // //CTRL[0]: 0= ; 1= //CTRL[1]: 0= ; 1= void setup() { // pinMode(MB1, OUTPUT); digitalWrite(MB1, LOW); pinMode(MB2, OUTPUT); analogWrite(MB2, 0); pinMode(MA1, OUTPUT); analogWrite(MA1, 0); pinMode(MA2, OUTPUT); digitalWrite(MA2, LOW); pinMode(Sonar_t, OUTPUT); digitalWrite(Sonar_t, LOW); pinMode(Sonar_r, INPUT); digitalWrite(Sonar_r, LOW); pinMode(LEDdist, OUTPUT); analogWrite(LEDdist, 0); pinMode(Mode, INPUT); digitalWrite(Mode, LOW); pinMode(LEDtech, OUTPUT); digitalWrite(LEDtech, LOW); pinMode(HDL, OUTPUT); digitalWrite(HDL, LOW); pinMode(SPK, OUTPUT); analogWrite(SPK, 0); // Serial.begin(UART_Speed); _UART_Interf(1, CMD); _UART_Interf(0, CMD); _Sonar(1); _Sonar(0); _Motor(1, 0, 0); _Motor(0, 0, 0); _Rotate(1, 0); _Rotate(0, 0); _ControlM(1, 0, 0, 0); _ControlM(0, 0, 0, 0); _ControlL(1, 0, 0, 0); _ControlL(0, 0, 0, 0); _ControlS(1, 0, 0, 0); _ControlS(0, 0, 0, 0); } void loop() { // if (digitalRead(Mode) == LOW) { if (CTRL[1] == 1) { CTRL[0] = 1; } else { CTRL[0] = 0; } // , reset , . reset CTRL[1] = 0; } else { if (CTRL[1] == 0) { CTRL[0] = 1; } else { CTRL[0] = 0; } CTRL[1] = 1; } // , D_Interf _UART_Interf(CTRL[0], CMD); // // _ControlM(CTRL[0], CMD[0], CMD[1], CTRL[1]); // _ControlL(CTRL[0], CMD[0], CMD[1], CTRL[1]); // _ControlS(CTRL[0], CMD[0], CMD[1], CTRL[1]); delay(Delay_prog); } //========== Interface module ========== void _UART_Interf(unsigned int RST, unsigned int *Data) { unsigned int DUART; static unsigned int cnt_byte; if (RST == 0) { if (Serial.available() != 0) { DUART = Serial.read(); switch (cnt_byte) { // , - case 0: if (DUART == byte('t')) { cnt_byte++; } else { cnt_byte = 0; } Data[0] = 0; Data[1] = 0; break; case 1: if (DUART == byte('x')) { cnt_byte++; } else { cnt_byte = 0; } Data[0] = 0; Data[1] = 0; break; case 2: if (DUART == byte('_')) { cnt_byte++; } else { cnt_byte = 0; } Data[0] = 0; Data[1] = 0; break; case 3: if (DUART == byte('c')) { cnt_byte++; } else { cnt_byte = 0; } Data[0] = 0; Data[1] = 0; break; case 4: if (DUART == byte('o')) { cnt_byte++; } else { cnt_byte = 0; } Data[0] = 0; Data[1] = 0; break; case 5: if (DUART == byte('m')) { cnt_byte++; } else { cnt_byte = 0; } Data[0] = 0; Data[1] = 0; break; case 6: if (DUART == byte('=')) { cnt_byte++; } else { cnt_byte = 0; } Data[0] = 0; Data[1] = 0; break; case 7: // , cnt_byte = 0; Data[0] = 1; Data[1] = DUART; break; } } else { Data[0] = 0; Data[1] = 0; } } else { cnt_byte = 0; Data[0] = 0; Data[1] = 0; } } //========== Sonar module ========== unsigned int _Sonar(unsigned int RST) { unsigned int Duration; if (RST == 0) { digitalWrite(Sonar_t, HIGH); // delayMicroseconds(10); digitalWrite(Sonar_t, LOW); Duration = pulseIn(Sonar_r, HIGH); // ( ) // if (Duration/58 > D1 && Duration/58 < D2) { analogWrite(LEDdist,int((-A*float(Duration/58)+B))); } else { if (Duration/58 < D1) { analogWrite(LEDdist, HIGH); } else { analogWrite(LEDdist, LOW); } } return Duration/58; // } else { digitalWrite(LEDdist, LOW); return 0; } } //========== Control Motor module ========== void _ControlM(unsigned int RST, unsigned int SCTRL, unsigned int DCTRL, unsigned int Mode) { unsigned int Dist; static unsigned int Speed; static unsigned long Time_forward; if (RST == 0) { if (Mode == 0) { //"" if (SCTRL == 1) { // switch (byte(DCTRL)) { // case Byte_forward: Dist = _Sonar(0); if (Dist > D1) { _Motor(0, M_forward, Speed); } // - break; case Byte_back: _Motor(0, M_back, Speed); break; case Byte_left: _Motor(0, M_left, Speed); break; case Byte_right: _Motor(0, M_right, Speed); break; case Byte_stop: _Motor(0, M_stop, Speed); break; default: break; } if (DCTRL > 47 && DCTRL < 58) { // Speed = (DCTRL-47)*25+5; digitalWrite(LEDtech, HIGH); delay(1000); digitalWrite(LEDtech, LOW); } } } if (Mode == 1) { // Speed = Speed_default; Dist = _Sonar(0); if (Dist > Dist_min) { if (millis()-Time_forward < 21000) { _Motor(0, M_forward, Speed); } else { // 20 , , .. . _Motor(0, M_stop, Speed); delay(300); _Motor(0, M_back, Speed); delay(600); _Motor(0, M_stop, Speed); delay(300); _Rotate(0, Speed); _Motor(0, M_stop, Speed); delay(300); Time_forward = millis()-1; //-1 , millis()-Time_forward } } else { _Motor(0, M_stop, Speed); delay(300); _Rotate(0, Speed); delay(300); Time_forward = millis()-1; } } } else { Dist = 0; Speed = Speed_default; Time_forward = 0; _Sonar(1); _Motor(0, 0, 0); _Rotate(1, 0); digitalWrite(LEDtech, LOW); } } //========== Control Light ========== void _ControlL(unsigned int RST, unsigned int SCTRL, unsigned int DCTRL, unsigned int Mode) { static unsigned int Light; // 0= ; 1= if (RST == 0) { if (Mode == 0) { //"" if (SCTRL == 1) { // switch (byte(DCTRL)) { // case Byte_light: if (Light == 0) { Light = 1; digitalWrite(HDL, HIGH); } else { Light = 0; digitalWrite(HDL, LOW); } break; default: break; } } } if (Mode == 1) { // //block operations } } else { Light = 0; digitalWrite(HDL, LOW); } } //========== Control Sound ========== void _ControlS(unsigned int RST, unsigned int SCTRL, unsigned int DCTRL, unsigned int Mode) { if (RST == 0) { if (Mode == 0) { //"" if (SCTRL == 1) { // switch (byte(DCTRL)) { // case Byte_sound: //block operations break; default: break; } } } if (Mode == 1) { // //block operations } } else { analogWrite(SPK, 0); } } //========== Motor module ========== void _Motor(unsigned int RST, unsigned int Mode, unsigned int Speed) { if (RST == 0) { switch (Mode) { // case 0: //stop digitalWrite(LEDtech, LOW); digitalWrite(MB1, LOW); analogWrite(MB2, 0); analogWrite(MA1, 0); digitalWrite(MA2, LOW); break; case 1: //forward digitalWrite(LEDtech, HIGH); digitalWrite(MB1, HIGH); analogWrite(MB2, 255-Speed); analogWrite(MA1, Speed); digitalWrite(MA2, LOW); break; case 2: //back digitalWrite(LEDtech, HIGH); digitalWrite(MB1, LOW); analogWrite(MB2, Speed); analogWrite(MA1, 255-Speed); digitalWrite(MA2, HIGH); break; case 3: //left digitalWrite(LEDtech, HIGH); digitalWrite(MB1, LOW); analogWrite(MB2, Speed); analogWrite(MA1, Speed); digitalWrite(MA2, LOW); break; case 4: //right digitalWrite(LEDtech, HIGH); digitalWrite(MB1, HIGH); analogWrite(MB2, 255-Speed); analogWrite(MA1, 255-Speed); digitalWrite(MA2, HIGH); break; default: break; } } else { digitalWrite(LEDtech, LOW); digitalWrite(MB1, LOW); analogWrite(MB2, 0); analogWrite(MA1, 0); digitalWrite(MA2, LOW); } } //========== Rotate ========== - void _Rotate(unsigned int RST, unsigned int Speed) { unsigned int Dist; static unsigned int Num; unsigned int cnt; unsigned long Now_time; if (RST == 0) { do { if (Num%2 == 0) { // if (Num >= 0 && Num < 128) { _Motor(0, M_right, Speed); delay(100); _Motor(0, M_stop, Speed); delay(100); } if (Num >= 128 && Num < 255) { _Motor(0, M_right, Speed); delay(200); _Motor(0, M_stop, Speed); delay(100); } } else { if (Num >= 0 && Num < 128) { _Motor(0, M_left, Speed); delay(250); _Motor(0, M_stop, Speed); delay(100); } if (Num >= 128 && Num < 255) { _Motor(0, M_left, Speed); delay(150); _Motor(0, M_stop, Speed); delay(100); } } cnt++; Dist = _Sonar(0); } while (Dist < Dist_min && cnt <= 3); // 3 ( . - - Num) cnt = 0; Now_time = millis(); // while (Now_time > 255) { // Now_time -= 255; } Num += Now_time; // : + while (Num > 255) { // Num -= 255; } } else { Dist = 0; Num = 0; cnt = 0; Now_time = 0; _Motor(1, 0, 0); _Sonar(1); } }
第6段階-作成の理解
私たちは何をしたかったのですか?
見てみましょう:
一般的に、それは何もないようです。 乗ります。 止まります。 紡績。 しかし...すべてがそんなに良いわけではありません。 ロボットは「2階」なしで非常に精力的に運転しますが、2階を設置すると、明らかに「退屈します」。 さらに、彼は絶えず左に連れ去り、人生の1つにとって本当に悪いことをほのめかします。そして、彼がそれをしたので、この非常に...さまざまな種に参加することは素晴らしいことです。
まとめると、開発するものがたくさんあることを正直に認めることができます。
1)ロボットは常に直線運動で左にピックします。 電源の放電が強いほど、偏差は大きくなります。 明らかに、これはエンジンパラメーターの広がりによるものであり、おそらくエンジンドライバーチャネルの異なる動作によるものです。 ロボットのこの動作をなくすには、光学式エンコーダーを接続し、そこから情報を受け取って、前進または後退するときにエンジン制御モジュールのアルゴリズムを調整する必要があります。 さらに、電源には統合された電圧レギュレータが必要です。たとえば、降圧電圧コンバータを使用してLi-IONエレメントのペアに電力を転送できます。
2)ロボットは、多くの場合、前方の物体を認識しません。 これは、超音波距離計の視野角が狭いためです。 明らかに、2つまたは3つの超音波センサーを設置することで、物体までの距離を決定する精度と信頼性を向上させることができます。 距離を決定するために、センサーは短い休止時間で連続的に調査され、超音波信号の相互反射の影響を排除します。
3)ファームウェアバージョン1.0で数回、回転アルゴリズムがハングする状況がありました-ロボットは絶えず回転し、前方に障害物がなくても前進しませんでした。 ロボットが強制的に自由な方向に保持されると、しばらくすると正常に動作し始めます。 このような状況を排除するには、問題が発生した場合のロボットの強制再初期化により、ロボットの動作の自己診断の基準を拡張する必要があります。 MKのハングを回避するには、WatchDogを使用する必要があります。
4)リモート制御中に、モーションを設定するキーボードのボタンを放した後、ロボットが停止しなかった場合に、状況がよく発生します。 その後、移動ボタンをすばやく押して離す必要がありました。 おそらく、停止コマンドが受信バッファーで失われたのか、おそらくコマンドはルーターから発行されなかったのでしょう。 このような状況を解消するには、モーションボタンを離すときに、ルーターから連続して数回停止コマンドを発行する必要があります。
5)MKのファームウェアを作成する場合、プログラムの順次実行により詳細が決まります。 「forward」コマンドを実行するには、インターフェイスモジュールに順次問い合わせ、範囲を決定、制御し、モーションモジュールを呼び出す必要があります。 このような調査では、範囲決定モジュールは最大50ミリ秒の遅延を導入し、着信コマンドの決定を禁止します。 機能の過度の成長や追加の範囲モジュールの出現の場合、遅延は受け入れられなくなる可能性があります。 FPGAにはこのような問題はありません。すべてのブロックは常に並行して動作します。 ある時点で、コマンドを取得し、範囲を処理してLEDに表示し、他の多くの操作を実行することが許可されています。 MKでは、無関係な関数を相互に並列実行することも不可能であるか、外部イベントに常に割り込みを使用する必要がありますが、これは必ずしも便利ではありません。 ただし、FPGA用のファームウェアの開発は、本質的に時間のかかる作業であり、特定のスキルが必要です。 ほとんどすべてのプログラマーがCコードを作成でき、VHDL / Verilogでコードを作成するには、チップロジックの本質を理解する必要があります。
6)リモートコントロールでは、オンボードカメラからの画像の変化が大きすぎるため、宇宙での向きを決めるのが難しくなります。 この効果を減らすには、表示ウィンドウのスムージングや縮小を適用する必要があります。
7)テストの過程で、機械部品の設計の失敗が明らかになりました。 全負荷時(プラットフォーム+「2階」)、プラットフォームのダイナミクスが低下し、コーナリング時にきしみ音が聞こえます。 おそらく、電源電圧を上げることで状況を修正できます。 さらに、設計が不十分なため、ボールベアリングのコーナリングやグリース補給が役に立たない場合、後輪が頻繁に詰まることがあります。
8)前方に移動するときの最大速度での手動制御により、必要に応じて停止し、後方に素早く移動すると、サポートのバックポイントが地面から引き裂かれながら、ロボットが急激に前方に傾く可能性があります。
そして今、私たちは何をしますか?
1)オーディオ信号の発行の実装-特定の周波数のオーディオ信号発生器の開発。
2)車輪に光学センサーと光学エンコーダーを使用して、直線運動で車輪の速度を調整します。
3)光センサーを使用した自動オン/オフヘッドライトの実装。
4)超音波センサーを3つに増やすことにより、前方の物体までの距離を決定する信頼性を向上させます。
5)標準サイズ18650の2つのリチウムイオン電池と統合電圧レギュレータに基づく電源。
6)エンジンギアボックスを分解してシリコングリースで潤滑し、きしみ音をなくします。
7)6.0-7.5Vへの供給電圧の増加を評価します。 同時に、MK出力の最大出力電流を超えないように、LEDの抵抗を再カウントしてはんだ付けする必要があることを考慮してください。
8)運動速度の滑らかな変化を実現するための状態の急激な変化(運動の開始または停止)の間、変化関数は線形または指数関数的です。
第7段階-開発
「第2段階」に進みます
さて、ここに我々はいる、そして物語全体のフィナーレに達した。
私はロボットの実証に成功し、サポート文書、特定された欠点の説明、およびそれらに対処する方法を手渡しました。 私の意見では、これらの技術的な説明と参照用語に精通していると、「内部」の電子機器の動作を正しく理解し、「微妙な」技術的な問題の大部分を除去できるはずです。 誰もが満足していたようです。
残念ながら、Enduranceの開発に真剣に参加するのに十分な時間があるとは限りません。 私の知る限り、同社は興味を持っており、ある程度、独立した開発者を探しています。このトピックに興味があるだけでなく、ロボット工学に参加する経験、機会、欲求がある場合は、そこに歓迎されるでしょう。
もちろん、このバージョンでのロボットの使用は、いくつかの産業タスクの観点から皮肉な光で見られます。 ただし、このプラットフォームは便利です。 遠隔監視を目的として、このようなロボットを国内に設置できたらいいと思います。 サーボドライブを取り付けて、ビデオカメラを回転させ、電源システムを考え直せば、家の状況をいつでも調べることができます。 そして、窓辺に乗って窓に行くと(はい、少なくともボードを置いて、傾斜した平面を作ります)、家の外に出ます。
バッテリーをLi-IONバッテリーと交換すると、問題なく充電できます。 同様のコントローラーが既製で利用可能です。 このようなロボットの最初のバージョンでは、検査後、充電ステーションに手動で簡単に調整でき、たとえば小型の電磁石を使用してコンタクタを接続します(オフハンド:一般的に、ロボットは切り替え時に主電源に切り替えられ、バッテリーは絶縁されます配線図と自律充電)。 ロボットの2番目のバージョンでは、自分でそれを行う方法を教えることができます-充電ステーションに合わせて「駐車」ボタンを押します(オフ:駐車ターゲットの中央に明るい形を描くことができ、ロボットは色検出センサーによって誘導され、夜にすべてがヘッドライトで強調表示されます)。
ロボット工学で頑張ってください!
始めることを恐れないでください。