初期デバイス要件の定義。 ハードウェアの選択
非常に一般的な方法で問題を解決しないために、一般的な考慮事項に基づいて特定の要件を自問しました(予算、コンポーネント購入の単純さまたは複雑さ、実装の困難さ、または運用上の予想される問題)。 同時に、これらの考慮事項を提示することにより、可能な対話を建設的な方向に即座に翻訳することができ、私の経験を活用したい人のために、どの詳細に注意を払うべきかを教えてくれます。 それでは始めましょう。
一般的な要件
解決策は次のとおりです。
- シンプルで高価ではありません。
- 利用可能なコンポーネント上に構築された;
- 旅行中(つまり、頑丈なケース、ネジ止めされたコネクタなど)に使用する予定であるため、デバイスは十分に信頼できるものでなければなりません。
- デバイスは保守可能でなければなりません。
- 開発には、電子工学と回路に関する本当に深い知識は必要なく、学校のコースをはるかに超えて行くべきではありません。
- 開発は、数ヶ月間だけでなく、数週間も遅らせるべきではありません。
- 配線、ボードのエッチングなどはしたくありません。できればモジュールの形で、既成のコンポーネントを最大限に活用したいです。
機能的
デバイスの主な機能:
- 特定の速度での反時計回りの回転(タクトボタン、押している間-回転)
- 特定の速度での時計回りの回転(タクトボタン、押したまま-回転)
- 速度調整(ポテンショメーター)
- 「エンジンの解放」コマンド-エンジンから電圧を除去します(必要に応じて、バッテリーの寿命を延ばし、エンジンを冷却します)
- さらに、フォーカサーを長時間(たとえば、10分以上)使用しない場合は、エンジンから自動的に電圧を除去する機能を挿入すると便利です。可能なオプションを次に示します。
- リモコンに、たとえばLEDの明るさなど、回転速度を簡単に表示できると便利です。
適用方法に基づいて、フォーカシングデバイスを制御するための少なくとも2つのオプションが必要です。
- 望遠鏡で直接作業しているとき(視覚的観察中またはデジタルカメラのディスプレイ上の画像に大まかに焦点を合わせている場合を含む)のコントロールパネルから-つまり、短いケーブルのボタンリモコンは私にはまったく問題ありません。
- OS Windowsのラップトップから独自のソフトウェアを使用する場合、フォーカサーコントロールユニットは、たとえばUSBを介してPCに接続する必要があります。
- オプションで、将来的に-ASCOMドライバーを使用するPCから。
PCを使用してリモートで作業する場合、フォーカサーの位置を同じ方法で記憶し、設定した位置に移動できるようにしたいと考えています。 これは、接眼レンズを変更すると、焦点距離が変化し、焦点調節手順を再度実行する必要があるという事実によるものです。 各接眼レンズのフォーカサー位置をプリセットの形式で保存し、接眼レンズを変更するときにそれらをすばやく切り替えたいと思います。 もちろん、望遠鏡の焦点を合わせ直す必要がありますが、温度が異なると焦点距離がわずかに異なるため、これを避けることはできません。 これに基づいて、マイクロコントローラのファームウェアは、(マイクロステップモードを考慮して)ステップを実行し、現在の位置をPCに転送し、フォーカスを指定された位置にスクロールする必要があります。
エンジンとドライバー
モーターは独自のステップです。ほとんどの場合、フォーカサーが静止しているため、低回転で正確な焦点を合わせて回転する必要があり、可能な限り小さい角度まで回転する必要があり、ほとんどの場合、剛性の位置固定が必要です-ステッパーモーターはこの問題を解決するのに理想的です。
モーター接続-バイポーラ
バイポーラ。 これは、低回転で最大トルクを与えるのはまさにバイポーラ接続であるためです。 6タップのエンジンを使用する場合は、極端な中程度の断熱材を使用する必要があります。 この場合の巻線の抵抗はそれぞれ2倍増加し、電流はそれぞれ2倍減少し、トルクは減少することに留意してください。
エンジンを選択する必要がある非常に重要なパラメーターは、 必要なエンジントルクです。 私の場合、室温で固定できる最大トルクは2 kg / cmでした。
余裕を持たせたいので、最小トルクを3 kg / cmに設定しました。
自宅で機器を測定せずにトルクを測定する方法。
これは簡単です。 これを行うには、フォーカス装置のシャフトにレバーを取り付け(フォーカスホイール自体を使用し、エッジでキャッチ)、ダイナモメーターを使用してシャフトの位置が「壊れる」力を測定する必要があります。 これを行うには、力を徐々に増やして、ダイナモメーターをレバーの軸に厳密に垂直に(当然、レバーの平面に、フォーカサーシャフトの軸に垂直に)引き、回転が始まる瞬間をキャッチします。
スキーム2
動力計の読み取り値を必要なユニットに持っていき、レバーアームを掛けることを忘れないでください(通常、トルクはN * mまたはkg * cmで示されます)。 動力計がない場合はどうなりますか? たとえば、スチールヤード、キッチンスケール、またはスプリングと定規を使用して自分でやる
後者の場合、キャリブレーションが必要です。これは、水のボトル(1l = 1kg)を使用して実行できます。 正確さは確かに高くはありませんが、私たちの仕事にとっては十分です。
ベアリングまたはフォーカサーのウォーム機構にかかる摩擦力は、スペース内の後者の方向(望遠鏡上)、および機器のフォーカサーに取り付けられた重量(アダプター、回転プリズム、接眼レンズ、デジタルカメラなど)に大きく依存することに注意することが重要です。 そのため、最大数の機器を吊り下げ、いくつかの位置で測定(2〜3回)を行うことをお勧めします(少なくとも2つは、フォーカサーの光軸が垂直および水平に向いている場合)。
さらに、寒い気候では摩擦力が著しく増加する可能性があるため、より多くのトルクが必要になることに留意する必要があります。
UPD! 別の非常に重要なポイント-通常、メーカーは定格トルクを示しています。 つまり、定格電圧、定格電流、 フルステップでの瞬間です! 必要な精度を達成するには、トルクが大幅に低下するマイクロステップモードを使用する必要があることが以下で明らかになります! したがって、余裕のあるトルクの大きさのモーターを選択する必要があります。
スキーム2
動力計の読み取り値を必要なユニットに持っていき、レバーアームを掛けることを忘れないでください(通常、トルクはN * mまたはkg * cmで示されます)。 動力計がない場合はどうなりますか? たとえば、スチールヤード、キッチンスケール、またはスプリングと定規を使用して自分でやる
後者の場合、キャリブレーションが必要です。これは、水のボトル(1l = 1kg)を使用して実行できます。 正確さは確かに高くはありませんが、私たちの仕事にとっては十分です。
ベアリングまたはフォーカサーのウォーム機構にかかる摩擦力は、スペース内の後者の方向(望遠鏡上)、および機器のフォーカサーに取り付けられた重量(アダプター、回転プリズム、接眼レンズ、デジタルカメラなど)に大きく依存することに注意することが重要です。 そのため、最大数の機器を吊り下げ、いくつかの位置で測定(2〜3回)を行うことをお勧めします(少なくとも2つは、フォーカサーの光軸が垂直および水平に向いている場合)。
さらに、寒い気候では摩擦力が著しく増加する可能性があるため、より多くのトルクが必要になることに留意する必要があります。
UPD! 別の非常に重要なポイント-通常、メーカーは定格トルクを示しています。 つまり、定格電圧、定格電流、 フルステップでの瞬間です! 必要な精度を達成するには、トルクが大幅に低下するマイクロステップモードを使用する必要があることが以下で明らかになります! したがって、余裕のあるトルクの大きさのモーターを選択する必要があります。
次に重要なパラメーターは、位置決め精度です。 ステッピングモーターを使用することを既に決めているので、質問は次のとおりです。モーターに必要なステップと、マイクロステップをサポートするドライバーを使用する必要がありますか。 利用可能なエンジンのほとんどは、1回転あたり1.8°(または200ステップ)のステップがありますが、0.9°(1回転あたり400ステップ)、7.5°などのステップがあるモデルも利用できます。 このパラメーターも個別です。 私の場合、焦点領域は約15°でした。
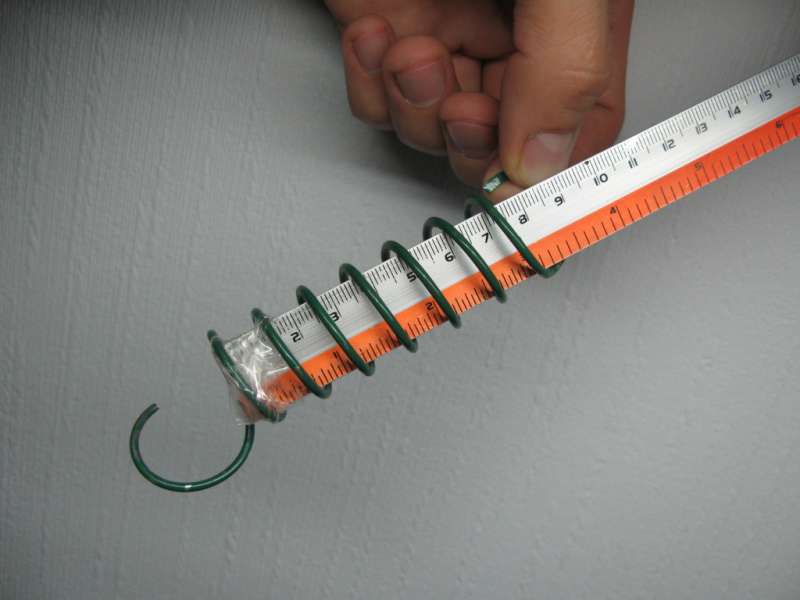
焦点角測定
ポジショニングの精度を評価するには、焦点を合わせるときに焦点装置のシャフトをどの角度で回転させるかを決定する必要があります。 これを行うには、フォーカサーハンドルにラベルを付けます-ゼロポイント。 さらに、マスクを使用して、バフチノフは星に注目しました。 分度器による垂直に対するマークの位置である角度a1を測定しました。 次に、彼は画像の焦点を(どちらかの方向に)デフォーカスし、焦点の欠如がはっきりと目立つようにしました(中央のビームは回折パターンの対称中心から実質的に離れていました)。 角度a2を測定しました-垂直線に対するマークの2番目の位置。 値の差(a1-a2)を2で乗算したものが焦点領域です。
スキーム3
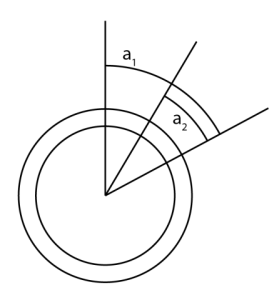
この場合、正確な焦点(中心からの中央ビームのシフトが顕著になる最小角度)は2°未満です(選択した方法ではより正確な測定はできませんが、これは必要ありません)。 したがって、エンジンを1.8°刻みで使用すると、フォーカスエリア全体が約10ステップでカバーされ、正確なフォーカス調整は事実上不可能になります。 0.9°のステップでも、焦点を合わせるには不十分です。
異なる接眼レンズで焦点合わせが行われる角度を測定することにより、異なる値が得られましたが、同じオーダー-10-20°でした。 したがって、この場合の接眼レンズの影響はおそらく基本的ではありません。
スキーム3
この場合、正確な焦点(中心からの中央ビームのシフトが顕著になる最小角度)は2°未満です(選択した方法ではより正確な測定はできませんが、これは必要ありません)。 したがって、エンジンを1.8°刻みで使用すると、フォーカスエリア全体が約10ステップでカバーされ、正確なフォーカス調整は事実上不可能になります。 0.9°のステップでも、焦点を合わせるには不十分です。
異なる接眼レンズで焦点合わせが行われる角度を測定することにより、異なる値が得られましたが、同じオーダー-10-20°でした。 したがって、この場合の接眼レンズの影響はおそらく基本的ではありません。
その結果、1.8°または0.9°のピッチのステッパーモーターを使用できるという結論に達しましたが、いずれにしてもマイクロステップをサポートするステッパーモータードライバーが必要です。 このため、Arduino Shieldとして配布されている一般的なドライバーの使用を放棄しなければなりませんでした。すべてのドライバーはマイクロステップをサポートしていません。 選択肢は、アクセスしやすく安価なPolulu A4988でした 。これは、実際には別のボードに配置する必要がありました。
後の次のプロジェクトでは 、同じメーカーのDRV8825を使用しましたが 、ずっと気に入っています。
 」
」
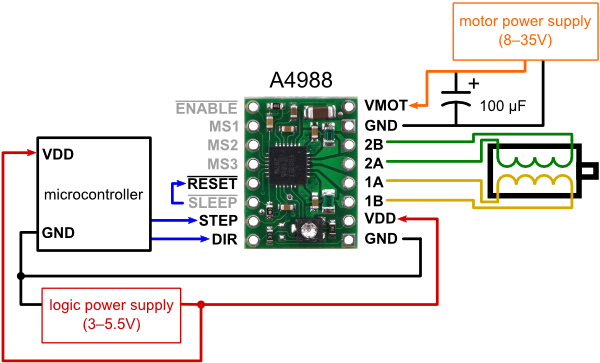
A4988を制御するには、少なくとも6つの信号(ENABLE、STEP、DIRおよび3つのマイクロステップ信号MS1、MS2、MS3)が必要です。 リモコンの3つのボタン(左、右、「リリース」)と速度LEDを考慮すると、マイクロコントローラーの10個のデジタル出力を使用する必要があることがわかります。
マイクロステップモードでのステップのスキップと低精度-神話と現実
マイクロステップモードのステッピングモーターは必然的にステップをスキップしたり、不正確に配置されたり、トルクが壊滅的に低下したりするなど、まったく使用すべきではないと言うことがよくあります。 この問題にしばらく時間を費やした後、これはよくある誤解であるという印象を受けました。 これは、私自身の実験とネットワーク上のさまざまなソースの両方で確認されています。 私はこの分野の専門家ではありません。収集した情報(理論的および実験的)を要約して、最終的な結論を読者に委ねます。 したがって、SDとマイクロステップに関する最も一般的な主張:
SDについて簡潔かつ非常に有能であることが、 ここ 、 ここ 、そしてここで非常によく述べられています
ほとんどの場合、手順をスキップする問題はSDの問題ではなく、電力供給不足の問題、または「過負荷」の問題です。 最初の問題は、適切な電源を選択し、A4988リミッターの正しい位置を設定することにより、非常に簡単に解決されます。 2番目の方法では、すべてのフォーカサーロードオプションを慎重に検討する必要があります。 また、低温での摩擦力(モーターシャフトとフォーカサー)の増加により、回転に必要なトルクが増加するという問題を解決する必要があります。 さまざまな方法で解決できます。 より強力なエンジンを使用するか、耐霜性グリースを使用できます。
したがって、SDはこのタスクに実際に理想的であり、ステップをスキップするという問題は、正しいSDと動作モードを選択するという問題だと思います。 そのため、ステッピングモーターのパワーは、あらゆる状況で十分なトルクを与えるのに十分です。
- マイクロステップモードでは、トルクが非常に低下します。 はい、確かに、SDの一般的な理論モデルでは、マイクロステップに切り替えるとトルクが大幅に低下します。 そして、ステップが小さいほど、損失は大きくなります。 同時に、多くのソースで(たとえば、 hereおよびhere )。 また、1/16および1/32マイクロステップモードで作業しているにもかかわらず、私の実験ではトルクが3倍低下したことにも気付きませんでした。
- マイクロステップモードでは、SDはステップをスキップする必要があります。
ステップがスキップされる理由を見てみましょう。 メーカーが示した主な理由:
- 不十分な栄養 A4988ドライバーには電流リミッター(リミッター)があり、向きを変えて、不十分な電流(および実際にはトルクの損失)がマイクロステップにどのように影響するかをすぐに確認します。 電流強度を16マイクロステップではなく減少させることにより、最初に8、次に安定4を得ることが徐々に可能になります。最初に、フルステップのさまざまなフェーズでのトルクも異なります。
- 負荷トルクが大きすぎる 。 つまり、エンジンに加えられるトルクは、特定のフェーズでこのエンジンによって与えられるトルクよりも明らかに大きい-この時点ではギャップがあります。
- 速度が高すぎます。 SDにはペースを合わせる時間がありません。 このタスクには関係ありません。
- ブレーキ/加速が速すぎる。 このタスクでは関係ありません。
- 悪いエンジン。 そして、これも起こります。
SDについて簡潔かつ非常に有能であることが、 ここ 、 ここ 、そしてここで非常によく述べられています
ほとんどの場合、手順をスキップする問題はSDの問題ではなく、電力供給不足の問題、または「過負荷」の問題です。 最初の問題は、適切な電源を選択し、A4988リミッターの正しい位置を設定することにより、非常に簡単に解決されます。 2番目の方法では、すべてのフォーカサーロードオプションを慎重に検討する必要があります。 また、低温での摩擦力(モーターシャフトとフォーカサー)の増加により、回転に必要なトルクが増加するという問題を解決する必要があります。 さまざまな方法で解決できます。 より強力なエンジンを使用するか、耐霜性グリースを使用できます。
したがって、SDはこのタスクに実際に理想的であり、ステップをスキップするという問題は、正しいSDと動作モードを選択するという問題だと思います。 そのため、ステッピングモーターのパワーは、あらゆる状況で十分なトルクを与えるのに十分です。
栄養
Arduino Unoはかなり広い電圧範囲(推奨範囲は7〜12V)と小さな電流で駆動されるため、電源を選択するときは実際にエンジンから離す必要があります。 A4988ドライバーは、8〜35Vの電圧をサポートします。 ステッピングモーターは、さまざまな定格パラメーター(さまざまな電圧と電流)を備えた幅広い品揃えで提供されます。 コントロールユニットとエンジン自体の両方に電源を使用したいと思います。 ここから制限があります。供給電圧は8〜12Vの範囲でなければなりません。 最終的な選択は、必要なパワーに基づいてエンジンを選択した後に行うことができます。
さらに、望遠鏡の使用場所を検討する価値があります。 私の場合、これはロッジア(〜220 V)、家の屋根(バッテリー)、道路(車、12 Vまたは〜220 Vのインバーターを介していますが、場合によっては車を出てから再びバッテリーを出さなければならない)です。 おそらく、誰かが電源の代わりにすぐにバッテリーを手に入れる必要があります。
力学
モーターの同軸配置を選択しました。 カップリングの助けを借りて、モーターは焦点合わせ装置のシャフトに直接固定されています。 2番目の支点は、フォーカサー本体へのエンジンの任意の剛性マウントです。 シンプルで信頼性が高いですが、より多くのトルクが必要です。 このようなスキームは、可能な限り取り付け(1ポイント)を簡素化し、必要に応じてエンジンの取り外しと取り付けを容易にし、最も重要なことには、ギア、プーリーなどの機械部品の「位置合わせ」を回避します。
スキーム1
重量と寸法
エンジンは望遠鏡の焦点合わせ装置に配置されるため、重量が重要です。 重量が多すぎるとバランスが複雑になり、マウントと三脚への負荷が大きくなり、寸法が大きくなります-風損を加えます。 したがって、エンジンが小さければ小さいほど良いです。 この基準は非常に個別であり、最大エンジン重量を300 gに設定します。
主要コンポーネントの選択(プラットフォーム、SD、PSU、ハウジングなど)
エンジンの選択
そのため、特定のステッピングモーターが必要であると既に判断しています。
特性。
- ステップ1.8°または0.9°;
- 3 kg / cmからのトルク;
- 定格電圧12V;
- 巻線電流-小さいほど、妥当な制限は1A以下です。
- 接続はバイポーラです(4タップ、6タップのユニポーラモーターを選択する場合、巻線の抵抗を2倍にして電流を再カウントすることを忘れないでください)。
- 重量-0.3 kg以下
- 寸法 一部の取り付け位置でモーターが大きすぎると、他の機器に干渉する可能性があることに注意してください。 このパラメーターは、最小化する意味もあります。
次に、ブラウザを起動して、インターネット上で適切なエンジンを探します。 中国の平均コストは10〜20米ドル、ロシア連邦の平均コストは1000〜1500rです。 定格電流が可能な限り低いモーターを選択しようとします。 理論的には、最大2Aの電流のモーターを使用できますが、大電流はエンジンの強力な加熱につながり(焦点を合わせた後は毎回オフにする必要があります)、バッテリー消費が速くなります。 さらに、A4988ドライバーには電流リミッターが組み込まれています。これは、非常に高い電流用に設計されたモーターを接続できるため、優れています。 悪いニュースは、そのようなエンジンでは必要なトルクが得られないことです。
例
力学
カップリングを選択するには、内径を知る必要があります。 これを行うには、フォーカサーシャフトの直径を測定し、モーターシャフトの直径を調べる必要があります。 私の場合、それぞれ8 mmと5 mmでした。 また、トルクを知る必要があります。
例
エンジンをフォーカサーにマウントすることは、純粋に個々のタスクです。 私はそれを次のように解決しました:アルミニウムのコーナー(特別にカット)をエンジンにねじ込み、このコーナーが入るフォーカサーのボディのスロットをカットしました。 これはすでにクランキングを除外するには十分ですが、バックラッシュを除外するには十分ではありません。 バックラッシュをなくすために、私は変圧器リングを取り、内側に医療待ちのストリップを接着し、フォーカサーに固定しました。 アルミニウムの角に別の穴を開け、ボルトでクランプを引っ張りました。 バックラッシュはなくなりましたが、もちろん構造全体は堅固ではありません。私は、柔軟なカップリングを介して、フォーカサー+シャフトのマウントに1つの支点を得ました。 したがって、カップリングのモビリティはほとんどありません。 実際には、この可動性は干渉しませんが、カップリングの変形に対するトルクの一部を「食べる」ことができます。
この質問は創造的で非常に個性的です。

コントロールユニット用プラットフォーム
実際、確かに多くのオプションがあります。私はArduino Unoを選びました。
Arduino UnoまたはOdaの最新のモジュール式電子機器を選択した理由
最も重要なことは、Arduino Unoには十分な数の入力と出力があり、使用する準備が完全に整っていることです。追加の配線、取り込み、プログラムは必要ありません。
さらに、実装には多くのオプションがあり、Arduino互換であるため、開発環境とコミュニティとともに、異なるアーキテクチャに実装されています。 もちろん、Arduino Unoでは、光は収束しませんでした。 モジュラーエレクトロニクスに基づいて学校の知識を使用すると、望遠鏡、水槽、温室、揺りかごの子供の乗り物酔い、または高精度プロセスの制御など、さまざまなプロセスの機械化と自動化が可能になります。 「スマートホーム」の理解できない不条理な概念は、気候、照明などによって制限されます。 最終的にいくつかの実用的な意味を獲得し、いくつかの本当に新しい品質を提供します。 さらに、多くの人がアクセスできるレベルで。 そしてそれは完璧です!
- 利用可能;
- 高価ではありません。
- 無料の開発環境。
- C ++プログラミング。
- 人気のプラットフォーム、世界中の愛好家のためのサポート。
- RS232サポート-マイクロコントローラーのデバッグボード(USB)をPCに接続すると、システムにCOMポートが表示されます。 マイクロコントローラーによって実行されるプログラムの側面からのRS232の操作のサポートも利用でき、プログラミングの観点からは、すべてが非常に簡単です。
最も重要なことは、Arduino Unoには十分な数の入力と出力があり、使用する準備が完全に整っていることです。追加の配線、取り込み、プログラムは必要ありません。
さらに、実装には多くのオプションがあり、Arduino互換であるため、開発環境とコミュニティとともに、異なるアーキテクチャに実装されています。 もちろん、Arduino Unoでは、光は収束しませんでした。 モジュラーエレクトロニクスに基づいて学校の知識を使用すると、望遠鏡、水槽、温室、揺りかごの子供の乗り物酔い、または高精度プロセスの制御など、さまざまなプロセスの機械化と自動化が可能になります。 「スマートホーム」の理解できない不条理な概念は、気候、照明などによって制限されます。 最終的にいくつかの実用的な意味を獲得し、いくつかの本当に新しい品質を提供します。 さらに、多くの人がアクセスできるレベルで。 そしてそれは完璧です!
電源の選択
非常に一般的な電圧は12Vで、停止したのはその電圧でした。 Arduinoに適しています。 この電圧用に設計された多くのステッピングモーターが市場に出回っています。 大量の電源、バッテリーがあり、車のシガーライターから直接接続できます。
私のデバイスについては、12Vおよび25ワットの電源に落ち着きました 。
もう少し詳細..
電源の選択は、電圧と電力の2つの主要なパラメーターに従って実行されます。 私の場合、U = 12Vです。 最大電流をI * Uとして知ることで、電力を推定できます。 エンジンの2Aと12Vの電圧に基づいて、24ワットが得られます。
バッテリーでも同様ですが、電力の代わりに、容量と動作電流を見るのが理にかなっています。 電流-最大2A、2〜3時間の稼働に基づく容量-4〜5 A *時間と言います。 実際には、夜間に集中するのに1時間以上かかることはほとんどないため、2 A *時間の容量でも十分です。
Arduinoとエンジンの一般的な電力条件に従って、ArduinoマイクロコントローラーのGNDとVINバスをそれぞれA4988のGNDとVMOTバスと組み合わせました( 図を参照 )。 同時に、Arduino電源コネクタと同様の2番目の電源コネクタがケースに表示されます。 これは、別の電源(24Vなど)を備えたより強力なエンジンにエンジンを交換する場合に、VINバスとVMOTバスを問題なく分離し、必要な電圧をエンジンに印加できるようにするためです。
バッテリーでも同様ですが、電力の代わりに、容量と動作電流を見るのが理にかなっています。 電流-最大2A、2〜3時間の稼働に基づく容量-4〜5 A *時間と言います。 実際には、夜間に集中するのに1時間以上かかることはほとんどないため、2 A *時間の容量でも十分です。
Arduinoとエンジンの一般的な電力条件に従って、ArduinoマイクロコントローラーのGNDとVINバスをそれぞれA4988のGNDとVMOTバスと組み合わせました( 図を参照 )。 同時に、Arduino電源コネクタと同様の2番目の電源コネクタがケースに表示されます。 これは、別の電源(24Vなど)を備えたより強力なエンジンにエンジンを交換する場合に、VINバスとVMOTバスを問題なく分離し、必要な電圧をエンジンに印加できるようにするためです。
建設的
最初は、デバイスを開発するときに標準コンポーネントを使用するための条件を設定しました。以下の仕様のすべてのコンポーネントは店舗で入手でき、大部分はインターネットで注文できます。
初心者の喜び、またはデータシートに書いていないこと...
「7回測定して1つ注文する」ということわざを思い出したいだけです:)組み立てた後も、予備の部品がたくさんありますが、2回目は注文する必要があります:)
ケース内のコネクタとブレッドボード上のボタンの配置について少しお話したいと思います。 コネクタを配置するときは、ケースが閉じてコネクタがアセンブリに干渉しないように配置することを考慮してください。 ボタンを配置するときは、組み立て後にボタンがキャップに取り付けられることに注意してください。このキャップはボタン自体よりも幅が広い場合があります。 したがって、ボード上のボタンを近づけすぎた場合-キャップをファイルする必要があります:)ボタンの高さも注意する価値があります-キャップを置くのに十分なケースから出なければなりません(ボタンの高さは、リモコンケースを注文するときに考慮する必要があります) DU)。
ケース内のコネクタとブレッドボード上のボタンの配置について少しお話したいと思います。 コネクタを配置するときは、ケースが閉じてコネクタがアセンブリに干渉しないように配置することを考慮してください。 ボタンを配置するときは、組み立て後にボタンがキャップに取り付けられることに注意してください。このキャップはボタン自体よりも幅が広い場合があります。 したがって、ボード上のボタンを近づけすぎた場合-キャップをファイルする必要があります:)ボタンの高さも注意する価値があります-キャップを置くのに十分なケースから出なければなりません(ボタンの高さは、リモコンケースを注文するときに考慮する必要があります) DU)。
エンジンコントロールユニット
したがって、このデバイスの頭脳はエンジンコントロールユニットです。 乱雑にならず、フォーカサー、Arduino Unoマイクロコントローラーボード、およびA4988ドライバーに負担をかけないように、それらを別の標準的な工業ビルに配置しました。 したがって、ケースには次のコネクタが表示されます。
- 電源(必要に応じて、標準のArduinoコネクタと独立したエンジン電源用の別のコネクタ)
- モーター電源ケーブルコネクタ
- PCおよびリモートコントロール用のマイクロコントローラーUSBポート
- リモートコントロールコネクタ
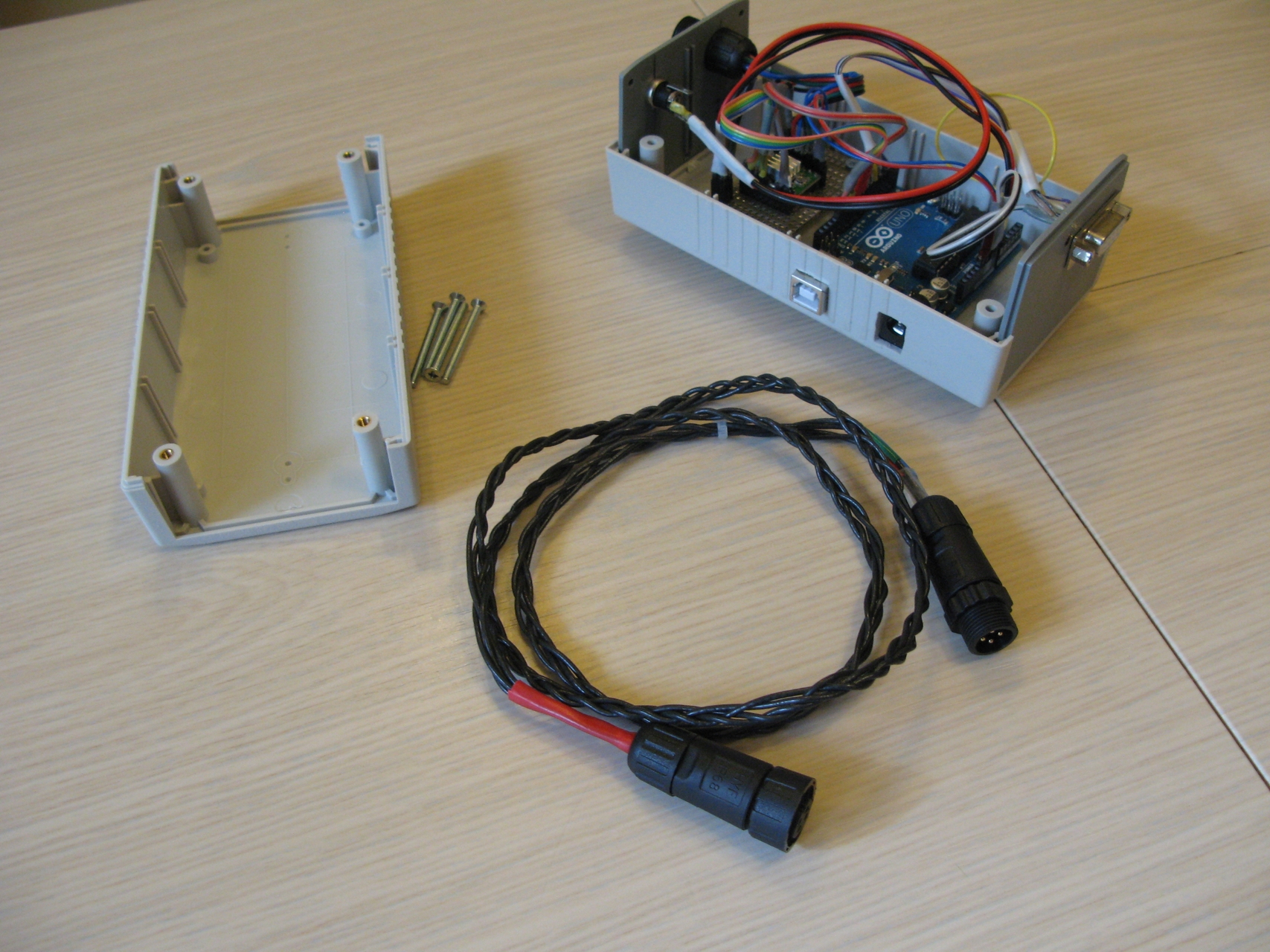

経験が示しているように、私は非常に質の高いケースではあるが、最も成功したものではないものを選んだ。 あなたは同様のものを撮ることができますが、数センチメートル低く、1-2センチメートル広いです。
コントロールユニットを望遠鏡の下または三脚の棚の上に置きます。 したがって、ケーブル長BU-モーターは約1mでなければなりません。 ケーブルは4芯で、最大2Aの電流に十分な断面積です。 自分で織ることができます。
リモコン
繰り返しますが、プリント回路基板を内部に配置できるようにするために、任意のケースを選択できます。 最初にプリント基板を準備し、次にケースを選択することをお勧めします。
回路基板についての別の言葉。 私は本当にPCBレイアウトに従事したくなかったので、完成したブレッドボードをDIP-1Mのはんだ付けに使用し、A4988の下で1/4カットし、残りをリモートコントロールに使用しました。

今日は以上です。 選択したコンポーネントの詳細については、こちらをご覧ください 。
回路図は、 ここと最初の部分にあります。
次のパートでは、Windowsのマイクロコントローラーコードとコントロールパネルコードについて説明します。