
屋内ナビゲーションを実装するタスクを設定したと想像してください。 したがって、GPS / Glonassなど、衛星ナビゲーションシステムは利用できません。 どうする この記事では、理論的な部分でこのような問題を解決するためのオプションを詳細に検討し、実際には-最新のIntel Edisonプラットフォームに基づいてNodeJSでBluetooth BLEを介してiBeaconビーコンを操作するための「屋内」トラッカーを実装し、三辺測量とフィルターの使用を検討しますKalman、NodeJS上のCylonJSセンサーライブラリ。
パート1.理論
1.1。 問題の緊急度
最近、屋内ナビゲーションの問題だけでなく、訪問者に彼らの位置(LBS-ロケーションベースのサービス)と好みに基づいたサービスを提供することが、ますます重要になっています。 建物はますます大きくなり、しばしばかなり複雑な構造になります。これは、そのような建物を常に訪れる人によってのみ導かれ、準備ができていない人にとっては、そのような場所の向きは拷問に変わります。
さらに、屋内ナビゲーション(屋内ナビゲーション)で使用されるソリューションは、建物の外、路上でのオリエンテーションにも役立ちます-厳しい建物条件では衛星ナビゲーションシステムを使用するのが困難です(直視線に衛星がなく、反射/減衰のみがあります) /ノイズの多いGPS信号/ Glonassなど)。 この問題は、特に都市密度の高い日本に関連しています。
衛星航法(GPS / Glonass)の場合、OutDoorサービスが存在します。これにより、最寄りのカフェ/レストラン/ホテルなどについて知ることができます。 あなたの現在の場所がわかっているという事実のおかげで。 また、屋内ナビゲーションサービスのおかげで、空港ビルの最寄りのチェックインカウンター、博物館の展示(+電話スクリーンにその説明がすぐに表示されます)、部門、店舗で必要な品物のある棚をすばやく簡単に見つけることができます(時間を費やす必要はありません)店内のすべての必要な商品を検索する)、無料駐車スペースなどがあります。 典型的な例は音声ガイドです。 博物館に来て音声ガイドを入手し、番号で展示品を検索するたびに、デバイスに番号を入力して説明を聞いてください。 屋内ナビゲーションを使用する場合、すべてが自動的に行われます-興味のある展示に行くだけで、身体の動きを追加することなく説明が再生されます。 困難も時間の損失もなく、すべてが簡単です。
また、屋内ナビゲーションのおかげで、新しいマーケティングツールが表示されます。店舗を通り過ぎると、携帯電話の画面にポップアップメッセージが表示されるため、プロモーション/イベント/サービス、商品についてすぐに知ることができます(いわゆる「ジオフェンシング」、さらに、彼に提案された提案は、彼の興味を考慮します-あなたは彼の過去の購入に関する情報を考慮することができるため)、または単に特定の場所に近づくと通知を受け取ります(屋内ナビゲーションの2番目の方向と呼ばれます) 「Geo-aware」)、そしてあなた-あなたのセールスルーム内の顧客の動きに基づいて統計情報(訪問者の「ヒートマップ」-Googleアナリティクスの非常に強力なオフラインアナログ)を取得します(どの部門や製品が非常に興味深いかを理解するために-非常に簡単です)。 このようなジオコンテキスト広告(LBA-ロケーションベース広告)の市場はすでに数十億ドルで測定されており、屋内ナビゲーションシステムの開発により、その急速な成長が期待されています。
大きな商業的見通しのため、屋内ナビゲーションの方向はより人気があり、グーグル、アップル、クアルコム、ブロードコム、ソニーなどの市場の主要なプレーヤーの注目をすでに集めています。これには、間違いなく、有望な方向がすでに投資されています数億ドル。
1.2。 問題を解決するためのオプション
私たちは問題の緊急性と見通しを整理しましたが、その実装を理解することは残っています。 衛星測位システムの主な欠点は、閉鎖空間での使用が難しいことです。その結果、屋内ナビゲーションの問題を解決する他の方法を探す必要があります。 それらのいくつかがあります:
1) Wi-Fiナビゲーション。 通信ネットワークの既存のインフラストラクチャ-Wi-Fiワイヤレスネットワークのポイントが使用され、これは最も安価なオプションです。 座標を決定する方法は次のとおりです-ユーザーデバイスは利用可能なWi-Fiアクセスポイントをスキャンし、それらに関する情報をサーバーに送信します。このデータベースデータは、ユーザーの座標を計算するために使用されるこれらのアクセスポイントの座標と比較されます。 残念ながら、Wi-Fiポイントの座標は正確にはわかっていませんが、変更される可能性があります(Wi-Fiポイントを別の場所に移動するか、別の場所に置き換えます-座標は既に正しくありません)。
このアプローチの精度には、多くのことが求められます(エラーは最大25メートルです!特別に作成されたwi-fiインフラストラクチャを使用する場合、3〜5メートルの精度ですが、このようなシステムの作成と保守にはすでにかなりのコストが必要です) -Fi、部屋の地図に位置を関連付けるのは問題です-iOS 8以降、Appleデバイス(iPhone、iPad)のMACアドレスは「広告」監視を防ぐために絶えず変更されています。
2) 地磁気位置決め。 これは、地球の磁場による方位に基づいており、地磁気の位置決めの基準として地磁気異常に基づいています(異常は、地磁場の不均一性により発生します)。 それは、地磁気異常を修正し、それが方向付けられることになっている領域の地図にそれらを置くことにあります。 将来、ナビゲーションは、磁力計が組み込まれているデバイスによってコンパイルされたマップに従って実行されます。 実装の実用的な例は、オウルのフィンランド大学の科学者チームのIndoorAtlasシステムです。 欠点は、実装の複雑さが高く、精度が低いことです。 敷地内には動的に変化する磁気異常が多数あります(配線、接続された負荷に応じて変化し、周囲の磁場の構成を大幅に変更するフィールド、電子デバイス、ラック、カートを持つ訪問者)は、示された方向方法に基づくナビゲーションを非常に複雑にしますスペース。
3) 衛星航法システム(GPS / Glonassなど)+慣性航法システム(ANN)。 トンネルを通過するなど、衛星ナビゲーションシステムからの信号が定期的に表示される場合に適用されます。トンネルに入ると、GPS / Glonass衛星から現在の座標と移動方向にアクセスできますが、トンネルに入ると信号が失われ、慣性航法が使用されますシステム(ANN、加速度計、ジャイロスコープ、磁力計に基づく)。これは、衛星との接続が失われ、受信に基づいてその関連性を維持するまで、最新の現在のGPS / Glonassデータを初期条件として使用します。 現在の速度/加速度についてのセンサデータ/衛星との通信を再開する前に、方向を駆動します。 エラーが絶えずANNに蓄積されていることを考慮する価値があり、時間が経つにつれて、ANNから受信したデータはますます現実とは異なってきます。
4) モバイルオペレーター(GSM)の基地局の方向。
少なくとも1つのGSMベースステーションが常に携帯電話/ GSMモデムの範囲内にあり、通常は複数あります。 これらのベースステーションの位置座標は既知です(Yandex.Navigatorなどの多数のナビゲーションサービスのおかげで、アプリケーションはGSM / Glonassを介して携帯電話で見えるベースステーションと現在位置に関する情報を受信し、データベースがこれらのデータに基づいているYandexにこの情報を送信します) 「ベースステーションと座標」の対応。提供されたAPIを介して無料でアクセスできます。 AT + CREG = 2コマンドをモデムに送信し、その結果、+ CREGメッセージを受信し始めます:現在接続されている基地局に関する情報-LACおよびCELLID(それぞれゾーンコードと基地局識別子)。 このデータを特別なサービス(Yandex、Google、およびその他の企業が提供)のいずれかに送信することにより、このベースステーションの座標を取得します。 多くのモデムでは、LACとCELLIDを示す表示可能なベースステーション(BS)のリストを取得できます-座標を取得し、三角測量法を使用しておおよその位置を決定するには、BSの座標を含むデータベースを介してのみ残ります。
短所-低精度(BSはユーザーから35 kmの距離で取り外すことができます+一部のBSはモバイルであり、常に位置を変更します)。
5) Becon Bluetoothビーコンの使用 -容認できるレベルの財務コストで十分な精度を提供します。 積極的に開発されている有望な技術であるため、次のセクションで詳細に説明し、それを実行するのはiBeaconです。
6) 相乗効果に基づくナビゲーション -上記のすべて(またはほとんど)の方法を使用して、現在位置を特定する問題を解決します。 一度に複数の座標決定ベクトルを使用するため、効率が達成されます。これにより、エラーを補正し、座標決定の精度を高めることができます。 ところで、昨年、このようなシステムの実装のために、新技術センターの開発と商業化のためのスコルコボ開発基金は、100万ドルの助成金を割り当てました。
1.3。 ビーコン技術
操作スキームは簡単です-周囲にBluetoothビーコンがインストールされており、その位置座標がわかっています。 特定の周期性を持つこれらのビーコンは、それらを識別する情報を含むブロードキャストを生成します。 ユーザーアプリケーションはこのデータを周期的に受信し、データベースからビーコンの座標を決定し、信号強度に基づいてビーコンの位置を決定します(これにより、各ビーコンからの距離を決定できます)。
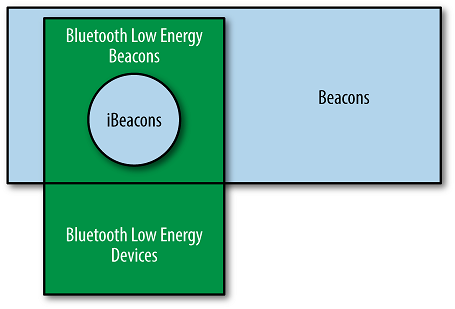
これらのビーコンはしばしばiBeaconビーコンと呼ばれますが、これは間違いです。 iBeaconはiOSでのモバイルアプリケーションで使用するAppleの標準の名前であり、Beaconはビーコンの物理的な実装であるため、Beacon beaconsと呼ぶ方がより正確です。
ビーコンマシンを詳しく見てみましょう。
物理的な実装に関しては、ビーコンビーコンは通常のBluetooth 4.0 LE(低エネルギー)デバイスであるため、BLEチップを搭載した任意のデバイス(Androidスマートフォン、iPhone、iPadなど)でその役割を正常に実行できますラップトップ、USBブルートゥースドングルを備えたRaspberry Piなど、ビーコンビーコン機能を実装する特別なアプリケーションがインストールされています。 上の図に示されている典型的なビーコンビーコンは、かなりコンパクトなサイズであり、1個のバッテリーから2年まで使用できます。 回路は、バッテリーとSoc(Systen-On-Chip)Texas Instruments CC2540 / 2541(Nordic nRF51822を使用)で構成されます。これは、Beaconビーコン機能を実装するためにファームウェアが読み込まれる8051マイクロコントローラーです。 ビーコンの範囲は平均10メートルです(モデルと設定に応じて15-20cmから25-40mまで変化します)。 データ出力の頻度は200ミリ秒ですが、この場合も原則として設定されます。頻度をより高く、頻度をより低く設定することができます。 1つのバッテリーの寿命は、モデルによって異なりますが、1年弱から3年(平均-2年)です。 1つのビーコンの価格は約15〜20ドルです。 ビーコンは、GATT Bluetoothプロファイルを使用して(広告モードで)全員にデータをブロードキャストするだけのシンプルなデバイスです(ただし、接続する必要さえありません)が、メーカーは通常、リモート構成の目的のためのビーコン(ブロードキャストされたデータの編集+データ出力の周波数と放射電力)。
1.4。 ビーコンビーコンの使用と安全性。
この記事の冒頭で検討した適用分野に加えて、ビーコンビーコンは、小型のサイズと単一のバッテリー充電での長寿命により、企業や建設において、貨物、人員、および機器の向きを合わせるために使用できます。 また、このようなビーコンを車で使用することも提案されています。 たとえば、車は1つの大きなビーコンビーコンになる可能性があります。これにより、「私の車はどこですか」などの機能を実装して、大きな駐車場で車を検索できます。
しかし、この技術を過大評価せず、その使用の安全性の問題を忘れないでください。 いくつかの情報源では、車でビーコンビーコンを使用してリモートでバリアを開くという提案に出会いました。 ビーコンビーコンが組み込まれた車が到着します-(企業/ガレージなどの入り口にある)バリアが自動的に開きます。 ここでは、この技術はセキュリティ機能を提供せず、攻撃者がリアルタイムで空をスキャンして目的のビーコンを検出することを妨げるものは何もないことを覚えておく必要があります。 その後、目的のpUUID、Major、Minorを偽のビーコンに登録し、それをオンにするだけで、他の誰かの障壁が上がり(またはドアが開く)、他の誰かの領域への道が開かれます。 この場合、ビーコンビーコンの使用を放棄し、送信機(マシン)と受信機(バリア)の間で暗号化された対話型交換コードの実装に頼る方が、ハッキングの可能性がなくなります。
また、攻撃者が以前に部屋に置かれたビーコンの方向を混乱させ、偽物をpUUID / Major / Minorで露出させて、屋内ナビゲーションを混乱させることを防ぐものは何もありません。 または、固定されたビーコンによって貨物の位置が決定される場合、攻撃者は灯台のデータを使用して適切な場所に自分自身を置き、この貨物を拾うことができます。
この技術を使用して、これを覚えて、あなたの保護方法を使用してください。
1.5。 データ形式。
ビーコンデータによって発行される形式を検討してください。 所定の周期性で、周期的に、ビーコンは同じデータセットを生成します。

Bluetoothパッケージの一般的な構造は次のとおりです。
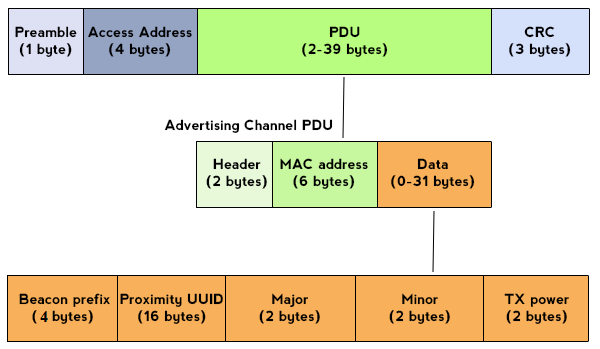
プリアンブル (4バイト)は、ビーコンビーコンを処理していることを確認できるパケットプレフィックスです。 常に4c000215です。 プリアンブルは4つのフィールドで構成されます。会社識別子(この例では2バイト、4c00)、タイプ(例では1バイト、0x02)、データ長(1バイト、値0x15)です。
近接UUID (16バイト)-ビーコンビーコンのグループの識別子。 たとえば、灯台が必要な複数のトレーディングフロアがあります。 この場合、これらすべてのホールで、灯台は私たちが指定したものと同じUUIDを持つことになり、これにより他の部外者と灯台が区別されます。
メジャー (2バイト)-1つのグループ内の小さなビーコンセットを区別できます。 つまり、UUIDで識別されるビーコンの1つの大きなグループ内に、それぞれがメジャー番号で識別される複数のサブグループを持つことができます。 たとえば、この例では、各ホールに独自のメジャー番号を割り当てることができます。 灯台が建物の複数のフロアをカバーする必要がある場合、通常、各メジャー番号は各フロアに関連付けられています。
マイナー (2バイト)-ビーコン自体をメジャーで識別する番号。 uuid + major + minorの組み合わせにより、ビーコンを一意に識別し、これらのデータからビーコンと座標の対応表からビーコン自体の座標を決定できます。
次の図は、これらの識別ビーコンパラメータの目的を視覚的に示しています。

TX電力 (上図のパラメーターK、2バイト)-ビーコン電力の基準値。これは、ビーコンから1メートルの距離での信号強度です。 ビーコンは、製造中に1回測定され、記録されます。 この定数は、ユーザーからビーコンまでの距離を決定するときに使用されます。 最初のビットは符号付きです(1-"-"、0-"+")。 たとえば、この例のTX Power(上の図のパラメーター「K」を参照)は0xBEです。 これは10進数で190です。 次に、ビーコンから1 mの距離での基準信号強度は256-190 = -66 dBmです。
ビーコンまでの距離の決定について詳しく説明します。 空間内での位置を決定するには、表示されているビーコンの座標(pUUID / Major / Minorに基づいて座標を決定できます)だけでなく、ビーコンまでの距離も知る必要があります。 これにより、受信信号の強度に基づいてユーザーのBluetoothレシーバーによって計算されるRSSI(受信信号強度インジケーター)パラメーターを作成できます。 このパラメーターの値が高いほど、ビーコンに近づきます。 TX電力-これはRSSIであり、ビーコンメーカーが1メートルの距離で測定した基準のみです。 次のように、ビーコンまでの距離(メートル単位)を決定するために、現在のRSSI値と修正用の基準TXパワーが使用されます。
function get_distance(rssi, tx_power) { if (rssi == 0) { return -1; // } var ratio = rssi / tx_power; if (ratio < 1) { return Math.pow(ratio, 10); } else { return 0.89976 * Math.pow(ratio, 7.7095) + 0.111; } }
1.6。 ビーコンビーコンによる座標の決定。
まず、ビーコンビーコンを部屋に配置する必要があります(たとえば、両面テープで壁/支柱に貼り付けて、ビーコンがより多くあり、ビーコンがより近くにある-座標を決定した結果が良い)可能な場合は、部屋の領域全体を均等にカバーし、互いのビーコンの距離を考慮して、それらを部屋マップの座標グリッドに配置します(原点の場合、部屋の角度などを選択できます)。


部屋に対する相対的な位置を決定するため、地理座標は必要ありません。したがって、部屋自体の内部の座標にアタッチされます。 上記の例では、円は部屋の支柱であり、各支柱にはビーコンが固定されています。 部屋は座標(0,0)、(9,0)、(9,7)、(0,7)によって制限されます。 接続するビーコンのデータが不明な場合、スマートフォンで可視性のフィールドにpUUID /メジャー/マイナービーコンを表示するアプリケーションを起動し(たとえば、AndroidにはiBeacon Locateがあります)、ビーコンの場所の同様のマップをコンパイルします。
一見、場所を特定するのに複雑なことはありません。ビーコンビーコンをスキャンし、テーブルから座標を特定し(上図を参照)、RSSIを使用して距離を計算し、場所を特定します...しかし、この瞬間から最も興味深い部分が始まります...

厳しい現実は独自の調整を行います。 実際には、ビーコンを使用して直接視認できる条件でも、RSSIパラメータは「ジャンプ」し、その値をランダムに変更します。その結果、数学的装置を使用しないと、ビーコンまでの距離を決定することが困難になります。 これは、次の要因によるものです。
- ビーコンの指向性と指向性、またはビーコン/ユーザーデバイスアンテナの受信
- ビーコンからデバイスへの方向にある大きな遮蔽物(人も1つ)の存在
- メインビームとのマルチパス干渉により、無線信号をよく反射する材料で作られた近くの表面の存在、および同じエリア内のビーコンビーコンの大きな蓄積
まず、各ビーコンのRSSI値を何らかの方法で平均化する必要があります。 これを行うには、ビーコンを最大周波数でデータを出力するように設定します(データ出力の周波数が高い-平均化のためのデータが多く、出力の精度が高いですが、データ出力の周波数が高くなるとビーコンのバッテリー寿命が短くなるため、注意する必要があります) 「ゴールデン平均」)、バッファに蓄積し、一定の周期(例えば、1秒に1回)で、バッファに蓄積されたデータに基づいて、各ビーコンの平均RSSI(以下、これらの「平均」RSSIに基づいて)を計算します。 我々の立場毎秒)ヤット、その後、バッファと次の秒、再びので、繰り返しデータを保存し、をクリアします。
その後、毎秒、平均RSSIを計算した後、最高の平均RSSIを持つ3つのビーコンを選択し、これらのビーコンの座標を使用して三辺測量を使用して空間内の位置を決定します。 ちなみに、 三辺測量はしばしば三角測量と混同されますが、これは同じことではありません。 デバイスの座標が参照オブジェクトの座標と各デバイスからデバイスまでの角度に基づいて計算される三角測量とは異なり、三辺測量では、2つ以上の参照オブジェクトの既知の位置と各参照オブジェクト間の距離の測定値(ビーコンビーコン)を使用してオブジェクトの位置が計算されますおよび場所が決定されるデバイス。 三辺測量のみを使用して2次元平面上のポイントまたはオブジェクトの位置を正確かつ明確に決定するには、原則として、少なくとも3つの参照ポイントが必要です(平均RSSIが最適な3つのビーコンビーコンからの情報)。
計算は2次元空間(XとYの2つの軸のみ)で実行され、ビーコンまでの距離はそれぞれ3次元であることを忘れてはなりません。オブザーバーとビーコンのZ軸の違いが目立つ場合は、X軸に投影を構築する必要があります。 Y:

ここで、AはRSSIを介して取得された距離、Bは2次元平面(観測者が位置する場所-座標が決定されるデバイス)からのビーコンの高さ、Cはこの平面内のビーコンまでの距離であり、これが検出されます。 なぜなら 三角形が正三角形の場合、ピタゴラスの定理により、簡単に目的の距離を見つけて計算に使用できます。
ですから、三辺測量を使用して3つのビーコンによって位置を特定しましたが、...喜ぶには早すぎます。 私たちが静止していても-私たちの場所はまだ「ジャンプ」しますが、実際には、この方法で3メートルの精度を得ることができました。
たとえば、最高のRSSIを持つビーコンを1秒間に1回選択し、10回連続して測定すると、次の計画の画像が得られます(1つのグリッド区分は4メートルです)。

(デバイスの位置は赤で決定され、その座標が決定され、そこから測定が行われます。円内の数字は、示されたビーコンが10回の連続測定で最高の平均RSSIを示した回数を示します)。 したがって、三角測量でも十分に受け入れられない結果が得られます。
したがって、得られた結果をさらに数学的に処理する必要があり、ここではカルマンフィルターが役立ちます。 このフィルターは、測定ノイズ(ランダムバースト)を除去し、現在の測定結果と過去の測定に基づいた予測結果の両方を考慮した結果を生成します。 このフィルターは、動的システムモデル(運動の法則)と2つの周期的に繰り返される段階(予測と調整)を使用します。 最初の段階-予測-次の瞬間のシステムの状態を計算し、2番目の-修正-次の測定結果を使用して予測を修正します。

このフィルターの詳細については、「 カルマンフィルター-はじめに 」をご覧ください。フィルターには制御アクションを考慮に入れる機能があるだけです。 たとえば、加速度計からの情報はそのような制御アクションである可能性があり、これにより結果が大幅に改善されます(この場合、エラーは3メートルではなく、1-1.5も小さくありませんが、一部はシステムを使用するカルマンフィルターによるものです運動方程式が与えられ、カオス運動を扱っています)。 つまり スキームは次のとおりです。平均RSSIを考慮します->最高のRSSIを持つ3つのビーコンを選択します->三辺測量により座標を取得します->カルマンフィルターを入力に供給します(制御アクションとして加速度計の読み取り値とともに)。
エラーを減らすことができます-一度に2つのシステムを適用します-ビーコンビーコンを使用した基本的な位置決定に加えて、加速度計、ジャイロスコープ、およびコンパスで構成される慣性ナビゲーションシステムを使用します(磁力計-その使用は不要ですが、非常に望ましい):
- 加速度計-作用力の投影を示します。 デバイスが静止しているか、加速せずに移動している場合、加速度計はその軸上の重力加速度(重力)の投影値を示します。
- ジャイロスコープ-角速度の投影を示します。 デバイスが静止している場合、ゼロになります。 デバイスの角度を変更すると、軸上にレイアウトされた回転速度が与えられます。
- 磁力計-軸上に配置された磁場強度を示します。
これらのセンサーからのデータは、「生の」形式での使用には適さず、ビーコンの場合のように、数学的な処理が必要です。さらに、温度補償のための温度センサーの使用が非常に望ましい MEMSジャイロスコープには、かなり顕著な温度ドリフトがあります。
使用するには、特定のシステムにある程度の自信を持たせる必要があります。 たとえば、座標を決定するときに、ANNを90%(ANNの信頼レベルが高いため)信頼し、10%-ビーコンビーコン(つまり、後者の場合、エラーとジャンプがはるかに高い)を信頼することを指定します。 このオプションを使用すると、ANNを使用して、座標を決定する精度を20〜30 cmまで向上させることができます(一般に、位置を特定するビーコンの数も座標を決定する精度に影響します-デバイスに近いほど精度は高くなりますが、実装はより高価になります。ビーコン-ペニーのものではありません)。
次の記事では、Intel Edison IoTデバイスを作成するための新しいプラットフォームに基づいたBeacon-trackerの実用的な実装について検討します。NodeJSでアプリケーションを作成します。