
(写真:ガソリンスタンドと水素燃料電池を備えた電気自動車、太陽電池)
ドイツでは、このデザイナーを中心に独自のコミュニティが開発され、彼らは発明者を誇りに思い、記録を樹立しました。
映像
このコンストラクターについて私が気に入ったのは、その
カットの下で、水素燃料電池の車について少し(デザイナーから「環境
エネルギー論」 + 「燃料要素」 )、デザイナーの発明者とモスクワの既存の建設キットの簡単なレビューについて(8歳以上のオタクだけがうらやむことができます。そのような贈り物は新年を待っているからです)。

(注意!目的もなく生きた年のためのkatomの痛みの下で)
水素燃料電池
燃料電池 (電気化学発電機)は、固体、液体、気体燃料の燃焼を使用する従来の技術とは対照的に、電気化学反応中に燃料の化学エネルギー(水素)を電気エネルギーに直接変換するデバイスです。 燃料の直接電気化学的変換は、環境の観点から非常に効率的で魅力的です。これは、運転中に最小限の汚染物質が放出され、強い騒音や振動がないためです。
既存の燃料電池の効率は60〜80%です 。これは、燃料エネルギーを電気に直接変換する(燃焼をバイパスする)ためです。
情報を検索しながら、たくさんの新しい単語を学びました
en.wikipedia.org/wiki/Ionistor
en.wikipedia.org/wiki/Electrochemical_Supercapacitors
en.wikipedia.org/wiki/Chemotronic
燃料電池に関する一般情報 
電気ドローン用小型水素燃料電池
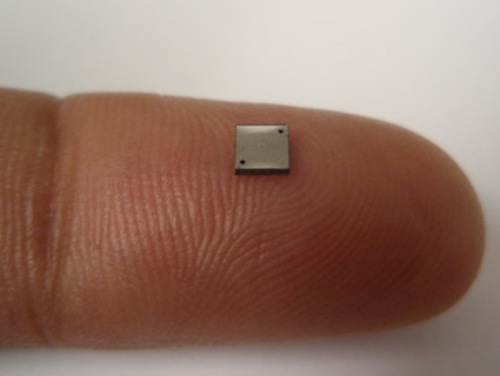
世界最小の燃料電池
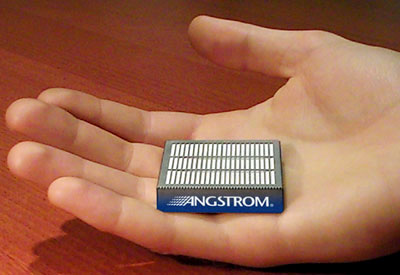
携帯電話の燃料電池
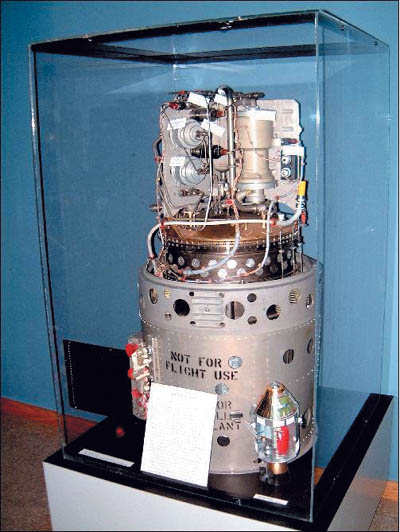
燃料電池はソビエトの月のプログラムで使用され、アポロ、ブラン、そして1982年にバスが打ち上げられました。
電気ドローン用小型水素燃料電池
世界最小の燃料電池
携帯電話の燃料電池
燃料電池はソビエトの月のプログラムで使用され、アポロ、ブラン、そして1982年にバスが打ち上げられました。
テーブル上の水素燃料電池の動作を示すビデオ(1.2 V; 440 mA)
プロトンメンブレン、水の電気分解、太陽電池、およびこれらすべてを1組の子供用デザイナーで実現します。 子供のデザイナーに原子電池がなければ、磁気メモリを搭載した子供用3Dプリンター用のグラフェンスペアパーツがない限り、次に何が私を驚かせるのかわかりません。
発明者
Artur Fischer-フラッシュとプラスチック製のダボの発明者(最初のダボは麻ひもと動物のりで構成され、私は木製のチョッパーを使用しました)

Arutr Fisherは1080件の特許の著者であり、エディソンにわずかに遅れて
アーサー・フィッシャーの写真をもっと見る 


発明特許のページ
発明特許のページ

少し後に、アーサーは骨折の治療用のダボを発明し、 ジャガイモ澱粉の子供の生分解性デザイナーを発明しました 。
このコンストラクター(Fischer TiP)から、クールな3Dギズモ(ハンドヘルドカラー3Dプリンター)を作成できます。 



レベル「ロボティクスと学習プログラミング」
おそらく、FISCHERTECHNIKの設計者は、コンピューターベースのモデル管理用の電子モジュールを組み込んだ市場で最初の製品でした。 COMPUTING EXPERIMENTALというタイトルの最初のキットは1983年に発売され、玩具ロボットをAtari、Commodore、およびBBCmicroコンピューターに接続する必要がありました。
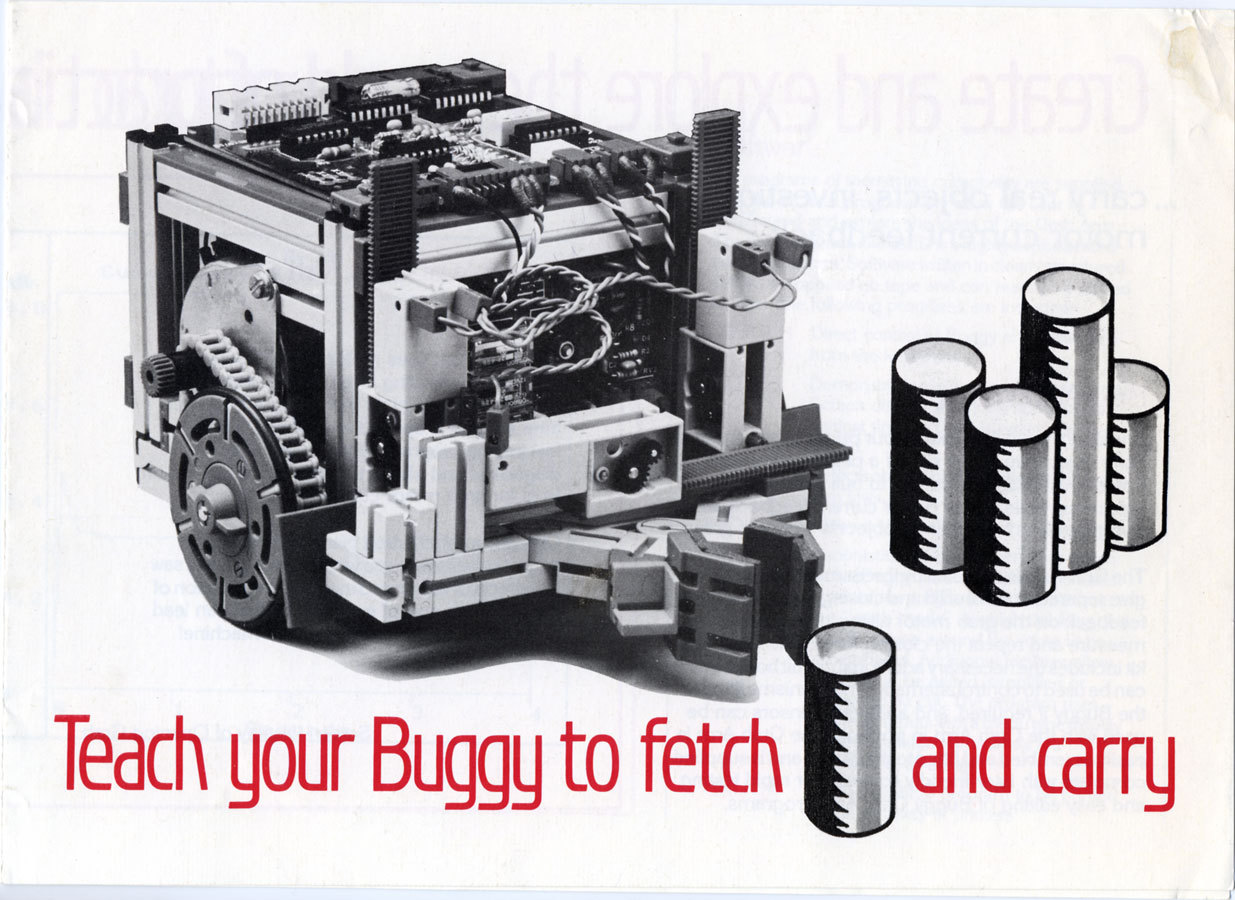
計算実験1983からのロボカメ

現在、FISCHERTECHNIK Roboticsシリーズの設計者は、かなり大人の特徴を備えたROBOTICS TXTプログラマブルトイコントローラーを持っています。
ROBOTICS TXTコントローラーの機能:
ARM Cortex A8メインプロセッサ:2つのコア、32ビット、500 MHz
周辺プロセッサ:Cortex M3
メモリ:128 MB DDR3 RAM、64 MBフラッシュ
ディスプレイ:カラータッチ2.4インチ(320x240ピクセル)
外部メモリ:microSDフラッシュメモリカード
ユニバーサル入力:8個のデジタル/アナログ0-9Vまたは0-5 kOhm
入力のカウント:4個(Fin <1 kHz)
Bluetoot / WiFi Comboワイヤレスモジュール:BT 2.1 EDR + 4.0、WLAN 802.11 b / g / n
キット「リモートコントロールキット」のリモートコントロール用IR光検出器
PCに接続するためのUSBミニUSBコネクタ
USBカメラ、USBフラッシュドライブ、その他のデバイスを接続するためのホストコントローラー機能を備えたUSB USB-Aコネクタ。
LinuxのドライバーであるUSB経由でビデオカメラを接続する
I2Cインターフェースで拡張モジュールを接続するための10ピンコネクタ
内蔵スピーカー
指定された間隔で測定するための交換可能なバッテリーを備えた内蔵リアルタイムクロック
BluetoothまたはWiFiを介してスマートフォン/タブレットに接続すると、コントローラーの端末として使用できます。
電源:標準のフィッシャーテクニックの2.5 mmプラグを介したバッテリーから、または3.45 mmの円筒形コネクタを介した9 V電源から。
寸法:90x90x25 mm
周辺プロセッサ:Cortex M3
メモリ:128 MB DDR3 RAM、64 MBフラッシュ
ディスプレイ:カラータッチ2.4インチ(320x240ピクセル)
外部メモリ:microSDフラッシュメモリカード
ユニバーサル入力:8個のデジタル/アナログ0-9Vまたは0-5 kOhm
入力のカウント:4個(Fin <1 kHz)
Bluetoot / WiFi Comboワイヤレスモジュール:BT 2.1 EDR + 4.0、WLAN 802.11 b / g / n
キット「リモートコントロールキット」のリモートコントロール用IR光検出器
PCに接続するためのUSBミニUSBコネクタ
USBカメラ、USBフラッシュドライブ、その他のデバイスを接続するためのホストコントローラー機能を備えたUSB USB-Aコネクタ。
LinuxのドライバーであるUSB経由でビデオカメラを接続する
I2Cインターフェースで拡張モジュールを接続するための10ピンコネクタ
内蔵スピーカー
指定された間隔で測定するための交換可能なバッテリーを備えた内蔵リアルタイムクロック
BluetoothまたはWiFiを介してスマートフォン/タブレットに接続すると、コントローラーの端末として使用できます。
電源:標準のフィッシャーテクニックの2.5 mmプラグを介したバッテリーから、または3.45 mmの円筒形コネクタを介した9 V電源から。
寸法:90x90x25 mm
コントローラーは、設計者が組み立てる機構、機械、ロボットのモデルを制御するために使用されます。 システムを有効にするには、制御プログラムを開発し、コントローラーにロードする必要があります。 これには、ROBO Proプログラミング言語を使用できます。
ROBO Proでは、プログラムは古典的なフローチャートの形式でコンパイルされます。これは、アルゴリズムの基本的な手順のシーケンスを示すグラフィカルな表示(または図)です。
大人の叔父は、フローチャートを使用してプログラム開発を計画し、その手順を適切に整理します。 信号機を制御するためのフローチャートは次のようになります。

ROBO Proのフローチャート
このフローチャートの各図は、アクションの個別の段階を示しています。緑と赤の男性の楕円は、アクションチェーンの開始と終了に対応しています。 矢印は一連のアクションを示しています。
通常、フローチャートが開発された後、実際にはアルゴリズムプログラミング言語でプログラムをコンパイルする計画があります。 さらに、各ブロックは1つ以上の演算子になります。 ROBO Proでは、「プログラムを実行」ボタンをクリックすると、回路をプログラムコードに変換するプロセスが自動的に行われます。 したがって、プログラムを手動でコーディングすることなく、実際のハードウェアでアルゴリズムをデバッグできます。
フローチャートを作成することは、プログラミングを勉強するときに最初に非常に役立ちます。作成するプログラムの論理的かつ完全な計画を作成する習慣を身に付けることができるからです。
ROBO Proでプログラム要素を表すために使用される図は、 GOST 19.701-90にリストされている要素をある程度繰り返しています。
LEGOに勝る利点は、LEGOにはレゴでのみ使用される独自の「クローズド」プログラミング言語があることです。 FISCHERTECHNIKでは、この言語は「アダルト」プログラミング言語と同じ原則に基づいています。 子どもたちは、一般的に受け入れられている記録アルゴリズムとブロック図の形式に慣れます。
Wi-Fiコントロール:

ROBOTICS TXT Discovererセット/学習ラボ。 ロシア語PDFのワークブック
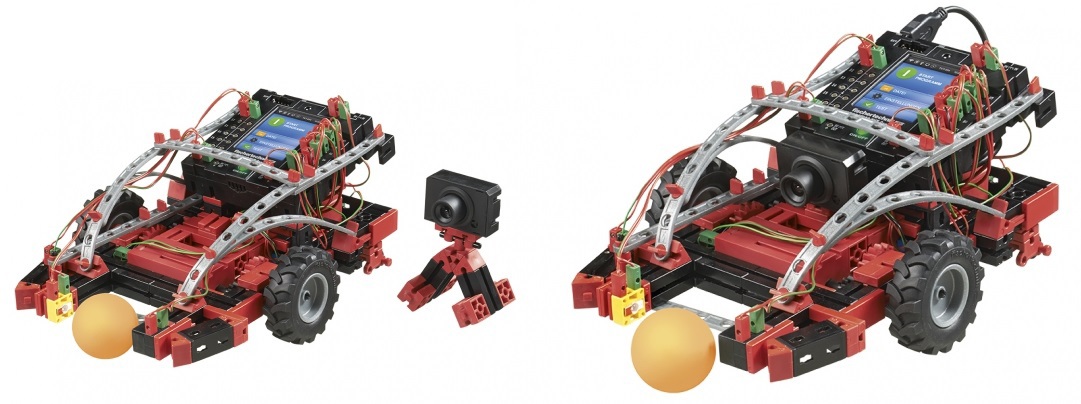
サッカーロボット

スカウトロボットとトラッカーロボット
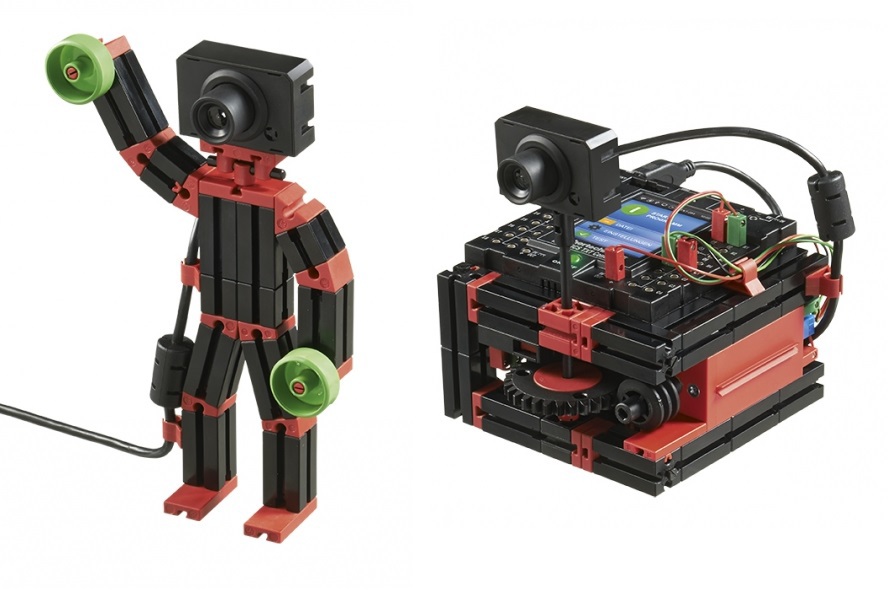
PTZカメラとビデオ撮影
ライン交差センサーと信号機を備えたハンドドライヤー

ROBO TX研究者:トンネルロボット、花探知機、レンジャー、ライフガードなど
ロシア語PDFのワークブック

ROBO TX ElectroPneumatics:ピンボール、ロボットカラーソーター、グリッパー付きボールトラック、真空マニピュレーター
ロシア語PDFのワークブック

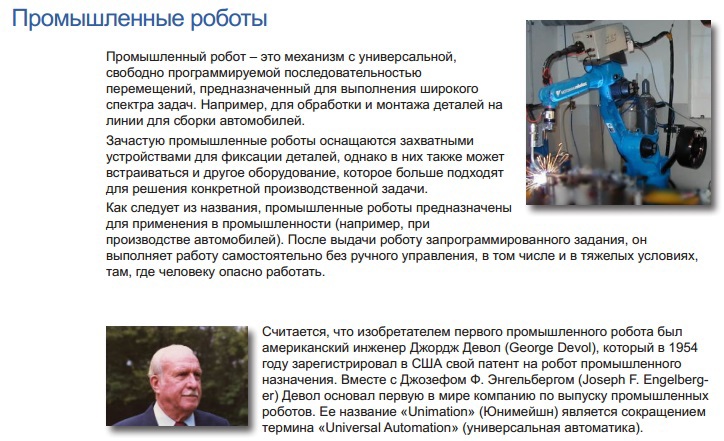
現実的で完全に機能する産業用ロボット:倉庫ロボット、3軸ロボットアーム、グリッパーロボット
ワークブックからの理論:
ロシア語PDFのワークブック
産業用ロボットのビデオ
プロレベル
「生態エネルギー」を設定する

生態学的エネルギー:風力発電設備、太陽の追跡、電気自動車、水素燃料電池
映像
回転式太陽電池、ただし追加セットあり:
回転式太陽電池、ただし追加セットあり:
ワークブックからの理論:

ロシア語PDFのワークブック
「技術革命」を設定する
17〜19世紀のさまざまな優れた発明を繰り返す11の興味深いモデル。

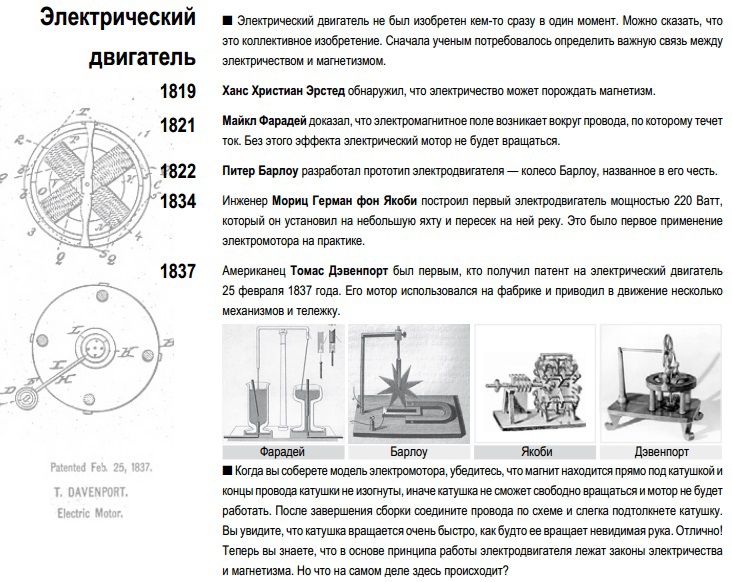
技術革新:「永久運動機械」、ヘリコプター、電気モーターおよび発電機、自動車用ワイパー(手で拭くために使用)、遠心レギュレーター(最初のサイバーアンテナ装置)、モールス電信など
ワークブックの説明の例:
ロシア語PDFのワークブック
「Leonardo Da Vinci Machines」を設定します
デザイナーから、レオナルドダヴィンチが発明したメカニズムを組み立てることができます。鍛冶屋のプライヤー、カタパルト、メカニカルドラム、グラブ、ラチェットメカニズム、翼、スライディングブリッジ、およびファイル切断機:

スライディングブリッジと戦車
ワークブックからの理論:

ロシア語PDFのワークブック
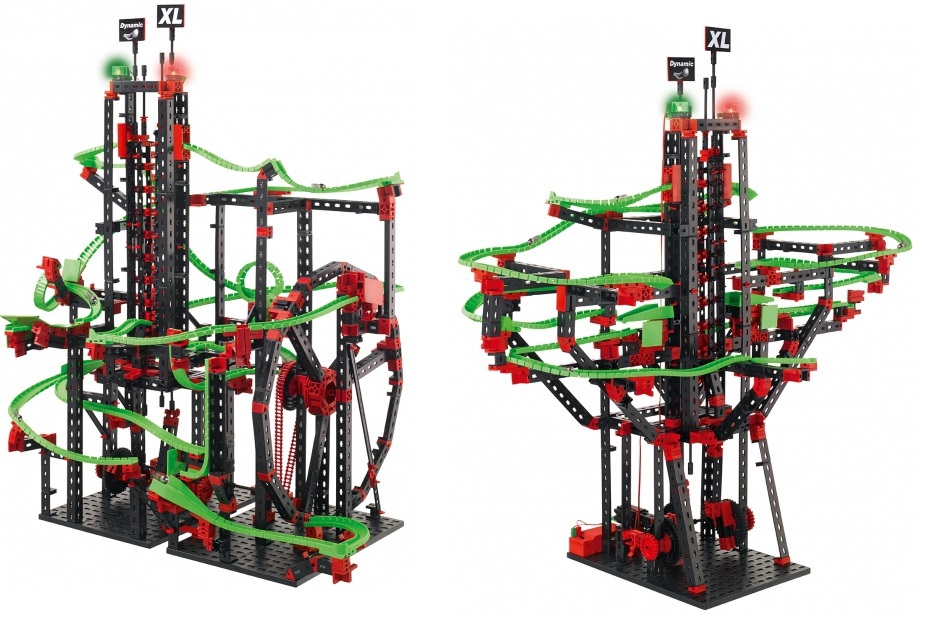
ダイナミクス/ダイナミクスXLセット
このキットを使用すると、慣性、加速、エネルギー保存、運動量などの物理現象を研究できます。
ワークブックからの理論:
ロシア語PDFのワークブック
映像
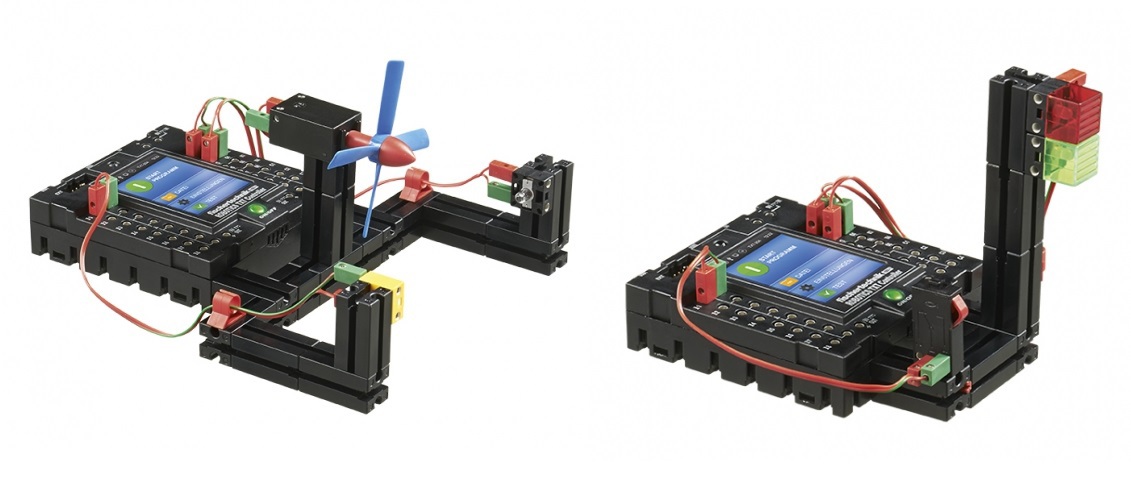
「エレクトロニクス」/「電気工学」を設定します
電子デバイスおよび自動デバイスを使用した実験用に設定します。 このコンストラクターを使用すると、エンジニアは電子機器の基礎に精通し、簡単な電気回路、要素の並列および直列接続、トランジスタを使用した回路、コンデンサ、抵抗器、LEDを習得できます。

タッチスイッチとスライドドア付きのカルーセル
ワークブックからの理論
ロシア語PDFのワークブック
おわりに

あなたが独立して、またはあなたの助けを借りてデザイナーを扱うことができる成長しているオタクがある場合は、箱入りオプションを選択してください。 ロシア語には多くのマニュアルとビデオがあります。 次回の出版物では、モスクワで若者向けのトレーニングコースが開催される場所と方法、およびサークルを自分で組織する方法に関する推奨事項を共有します。
PS
メガクラフトFISCHERTECHNIKのハードコアビデオ
ほぼ3Dプリンター:
ステム:
生産モデリング:
ほぼ3Dプリンター:
ステム:
生産モデリング: