
2週間の間、ユージンのかわいい韓国のiRobi(q)ロボットは、 iClebo Arteロボット掃除機(全員用)、ナースロボット(医療用)、サッパーロボット(軍用)、乳母ロボット、2台を製造しています。ロボット教師(子供向け)。
すべてのYujinロボットの同時ナビゲーションとマッピング(英語のSLAM。SimultaneousLocation and Mapping)の方法はほぼ同じです(したがって、掃除機を購入して軍用ロボットの仕組みを理解できます)。
カットの下には、ユージンロボットラインの簡単な説明、ハックスペースで笑っているロボットの面白い冒険、このロボット教育者が持っているものの写真がいくつかあります。
スラム

SLAM-同時ローカリゼーションとマッピング-地図を同時にナビゲートおよび構築する方法-未知の空間で地図を構築するため、または現在の位置と移動距離を監視しながら既知の空間で地図を更新するためにロボットと自律車両が使用する方法
ナビゲーションとマップの同時構築(SLAM)の方法は、2つの独立したプロセスを連続した連続計算サイクルにリンクする概念であり、1つのプロセスの結果が別のプロセスの計算に関与します。
マップ構築は、ロボットセンサーから収集された情報を統合する問題です。 このプロセスで、ロボットは「世界はどのように見えるか?」という質問に答えます。
マップを構築する主な側面は、環境データの表示とセンサーデータの解釈です。
それどころか、ローカリゼーションは地図上のロボットの位置を決定する問題です。 同時に、ロボットは「どこにいるの?」という質問に答えます。
ローカリゼーションは、ローカルとグローバルの2つのタイプに分けることができます。
ローカルローカリゼーションを使用すると、初期位置がわかっているときにマップ上のロボットの位置を追跡できます。グローバルローカリゼーションとは、不慣れな場所(ロボットが盗難された場合など)のロボットの位置です。
ロボットは次のタスクに直面します:a)マップを構築し、b)このマップでロボットをローカライズします。 実際には、これら2つのタスクを互いに独立して解決することはできません。 ロボットが(一連の観測に基づいて)環境がどのように見えるかという質問に答える前に、これらの観測が行われた場所を知る必要があります。 同時に、地図なしでロボットの現在位置を評価することは困難です。
したがって、SLAMは典型的な鶏と卵の問題であることがわかりました。ローカライズにはマップが必要であり、マップを作成するにはローカリゼーションが必要です。
SLAMは、オドメトリー(ロボットホイールからのデータ)、1Dおよび2Dレーザーレンジング、3D高解像度LiDAR、3DフラッシュLIDAR、2Dおよび3Dソナー、1つまたは複数の2Dカメラを使用して実装されます。 触覚SLAMシステム(レジスタタッチ)、レーダーSLAM、wifi-SLAMもあります。 (エキゾチックなFootSLAMもあります)
このテーマに関するHabréの記事
MITは、監視員用のリアルタイムマッピングシステムを開発しました 。
ロボットがマップを作成するために必要なものは何ですか? ;
ロボット掃除機のテスト:iRobot Roomba 780、Moneual MR7700、iClebo ArteおよびNeato XV-11 。
指導ビデオ
ユージンカンパニー
ユージンは1988年に産業および軍事目的で設立されました。
ロボットライン

サッパーロボット(マイナー?)

軍用ロボットの写真をもっと見る 


ロボット教師

インタラクティブな発音トレーニング+キャラクター
ロボット車椅子

カフェロ-ロボットウェイター

(チップの代わりに、バッテリーが必要です)
Gocartロボットポーター

ホテルおよび産業およびヘルスケア向け
イロビ
TTX

バッテリー3時間
7インチWVGAタッチスクリーン
音声認識
1.3メガピクセルのカメラ
40 GBハードドライブ(カラオケ用)
コスト-4,598ドル
2000年の韓国の幼稚園には同様のロボットが装備されていた
(現在、幼稚園はおそらくゲームリーグオブレジェンドを装備しています)
私の目にはどれほどの愛があり、ti病な赤面があります:

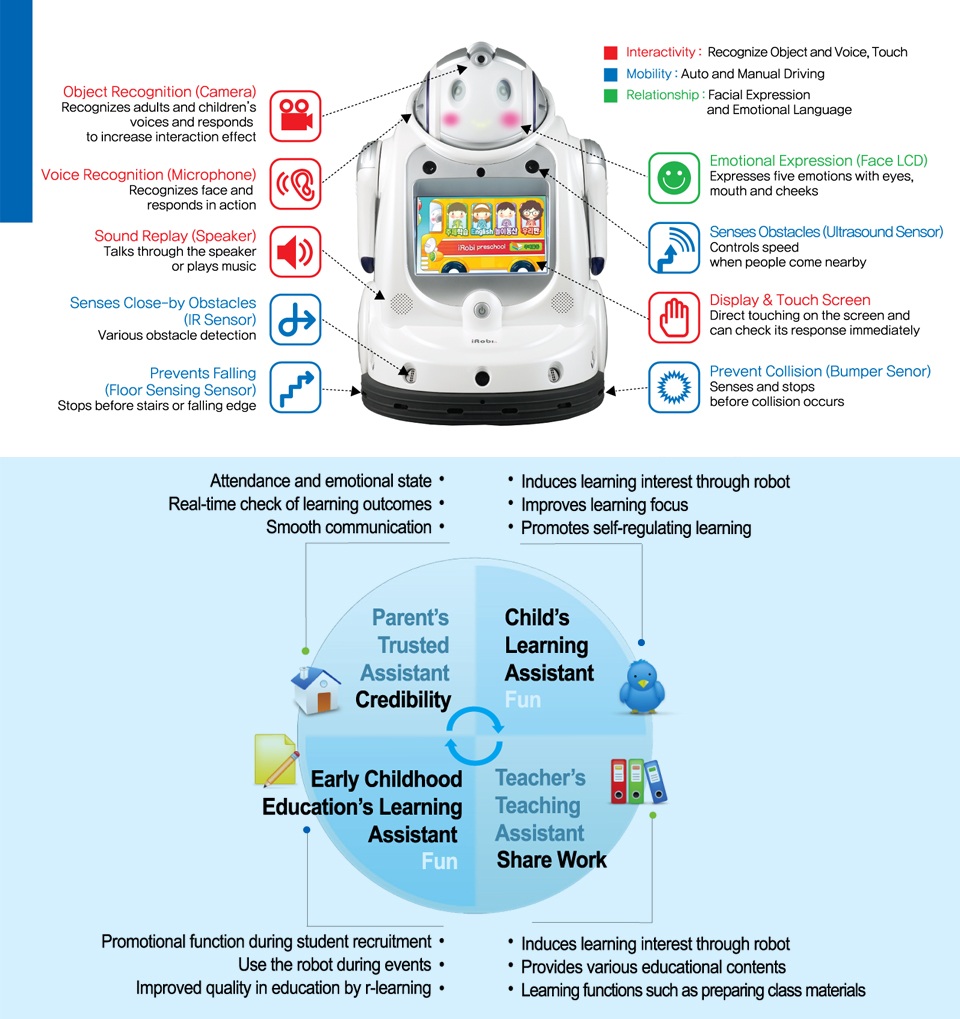
特徴
ビデオ認識(カメラ)
ロボットは画像を認識し、顔やアクションに応答できます。
音声認識(マイク)
音声認識
感情表現(顔のLED)
ロボットは、LED(目、口、ラニタ)で5つの感情を「表現」できます。
障害物検出(超音波センサー)
超音波障害物検出。 ロボットは、経路内に人や障害物を検出すると一時停止します。
オーディオ再生(スピーカー)
ロボットは話し、音楽を演奏しています。
ディスプレイとタッチスクリーン
(タッチスクリーンを使用して誰も驚かないでしょうが、2007年はクールでした)
近接障害物検出(IRセンサー)
障害物を避けるためのIRセンサー
落下防止(床検知センサー)
転倒の回避。 ロボットは階段と「崖」の前で停止します(この場合、彼はテーブルから落ちるのを防ぎました)
衝突検出(バンパーセンサー)
バンパーにはタッチセンサーが装備されています。 トリガーされると、ロボットは停止します
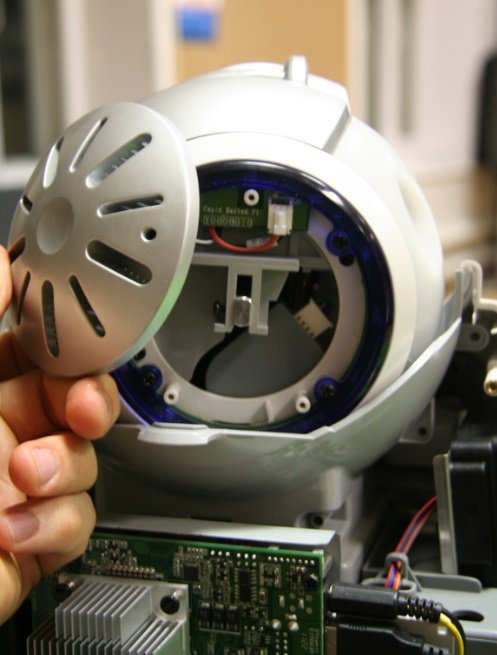
ロボットには、部屋の地図を作成するためのカメラが装備されています。 それを使用して、彼は天井をスキャンし、毎秒最大24フレームを生成して、部屋の正確な構造を形成し、壁の接合部とパーティションの位置を決定します。
デバイス:
応用分野
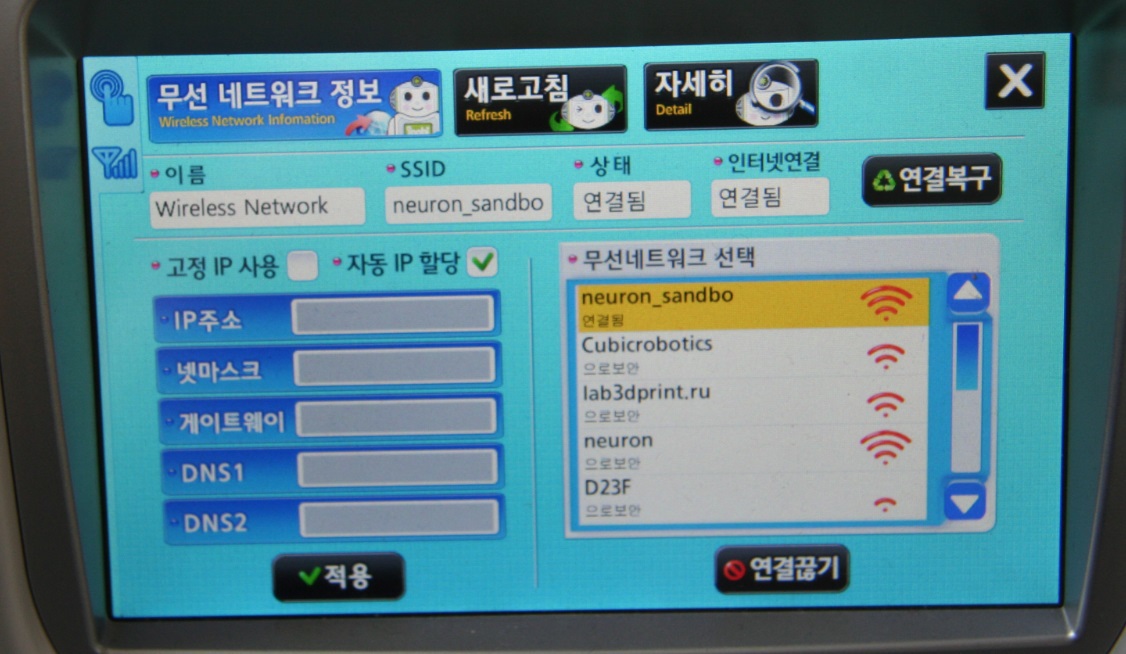
インターネット接続メニュー:
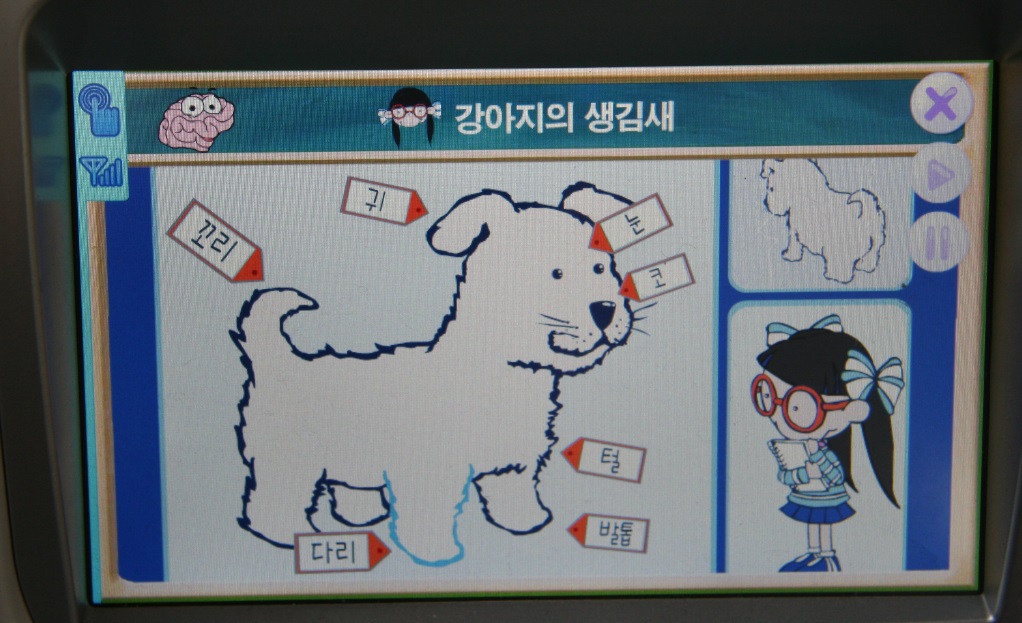
すべてのボタンを徹底的に検索し、次のように入力して韓国語を学習します。
メインメニュー:

アクションの上の2行はインターネット接続を必要とし、下の行は自律的です。 サーバー(クラウド?)のどこかにアカウントが作成され、人間のコンサルタントがいた可能性さえあるようです。
あなたが彼を撮影するときにあなたを撮影します。

彼の手に触れると写真が撮られます。
このような先生を使えば、すぐに韓国語を学ぶことができます。
(大きな目が喜ぶ)
ああ、これらの韓国の文化的なコード:

(メモリ開発ゲーム)
カラオケモード:

(韓国の歌が流れている間、ロボットは手を動かして手を振る)
反射:

ポールエクマンの「嘘の理論」は、ロボットでも機能します。

内部

「ルーク、私はあなたの父親です」
彼女なしで

腕の下-ハードドライブ
背面のタッチスクリーン:

戻る:
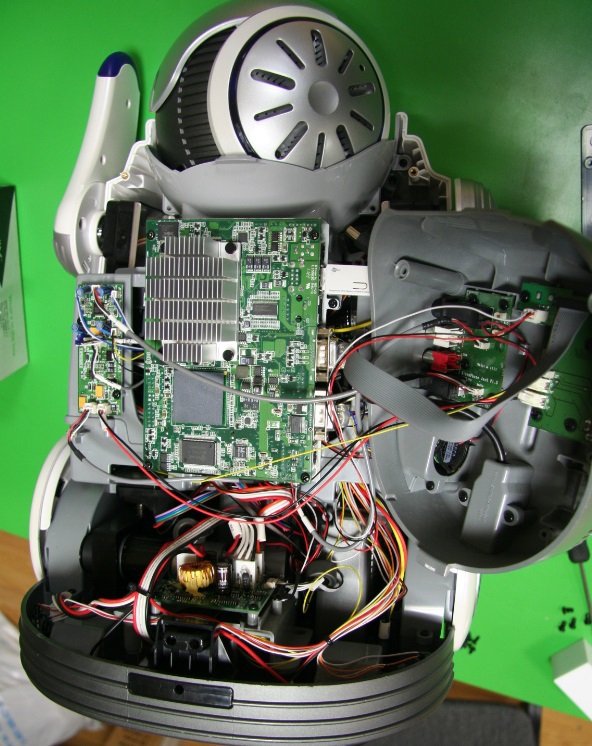
Wi-Fiモジュール:

私は頭の中に深く入らず、耳を離して見ました-カメラからのモーターとワイヤーがあります:
IRセンサー:

変なケース
一度、「私は食べたい、ソケットを探します」という叫びで(彼は英語で、おおよその翻訳を話しました)、ロボットは冒険に向かって駆けつけました。 、彼は端まで走り、tiてて数センチ身を乗り出し、「さあ、あなたは気にしない」と言いました(翻訳は逐語的ではありませんが、意味はこのようなものです)、スリープモードに入りました。
ロボットを引き出しに入れて「オン」キーを静かに押し、ロードに20〜30秒かかるので、静かに梱包を続けましたが、突然命が吹き込まれ、腕をかき混ぜて何かをつぶやき始めました。 私は心が沈み、子猫をバッグに押し込んだことをすぐに思い出しました。
Azimovは、人類がロボットの感情的な認識に問題を抱えることは正しいことでした。