カットの下にたくさんの写真。
背景

典型的な日に私たちの研究室
私のクラスメートは、MSTUの水中ロボット部門で勉強しています。 N.E.バウマン。 新年の少し後に、私は彼からメッセージを受け取ります。誰も特にチームでプログラミングを行っていないため、マイクロコントローラープログラマーとして競技用水中ロボットのプロジェクトに参加するという提案があります。 私は次の学期の独立した仕事の予定がなかったので、喜んで同意しました。最終的に、私は最終的に触れることができ、ホームクラフトの範囲を超えた現実的な何かをする機会を得ました。 Hydronavtikaセンターは数年前から当研究所で運営されており、その活動は主に、遠隔操作の水中ビークルに関するMarine Advanced Technology Education Center(MATE)の競技会の準備と参加に集中しています。英語文学は伝統的にROVと略されます)。 センターの実験室には、オシロスコープ、はんだ付けステーション、さまざまな機械やツール、水ろ過システムを備えた小さなプールなど、生産的な作業に必要なすべてのものが原則として装備されています。 彼がいなければとても難しいでしょう 必要に応じて、大学のスポーツ施設のプールにぶつかるたびに。

ホームプールでロボットをテストする
私の友人との短いチャットの後、私たちは彼らの研究室で他の人と会うことに同意しました。 みんなはとても楽しかったし、前向きでした。 プロジェクトの現状とコンテスト自体についての短い議論の後、私の参加について決定が下されました。
イベントの本質
競技に関する詳細は、 公式ウェブサイトをご覧ください 。 要するに、競争はいくつかの段階を経ることです。 まず、参加に関するコンペの主催者の承認を得る必要があります。そのためには、デバイスの詳細な説明を含む技術レポートなど、多数のドキュメントを準備する必要があります。 また、パフォーマンスの1か月前に、デバイスの動作を示すビデオを提供して、一般に泳ぎ、少なくともいくつかのタスクを水中で実行できることを示す必要があります。 準備段階を経て主催者の承認を得た後、コンテストに参加できます。 すべての同様のイベントと同様に、タスクのセットは毎年変更されます。
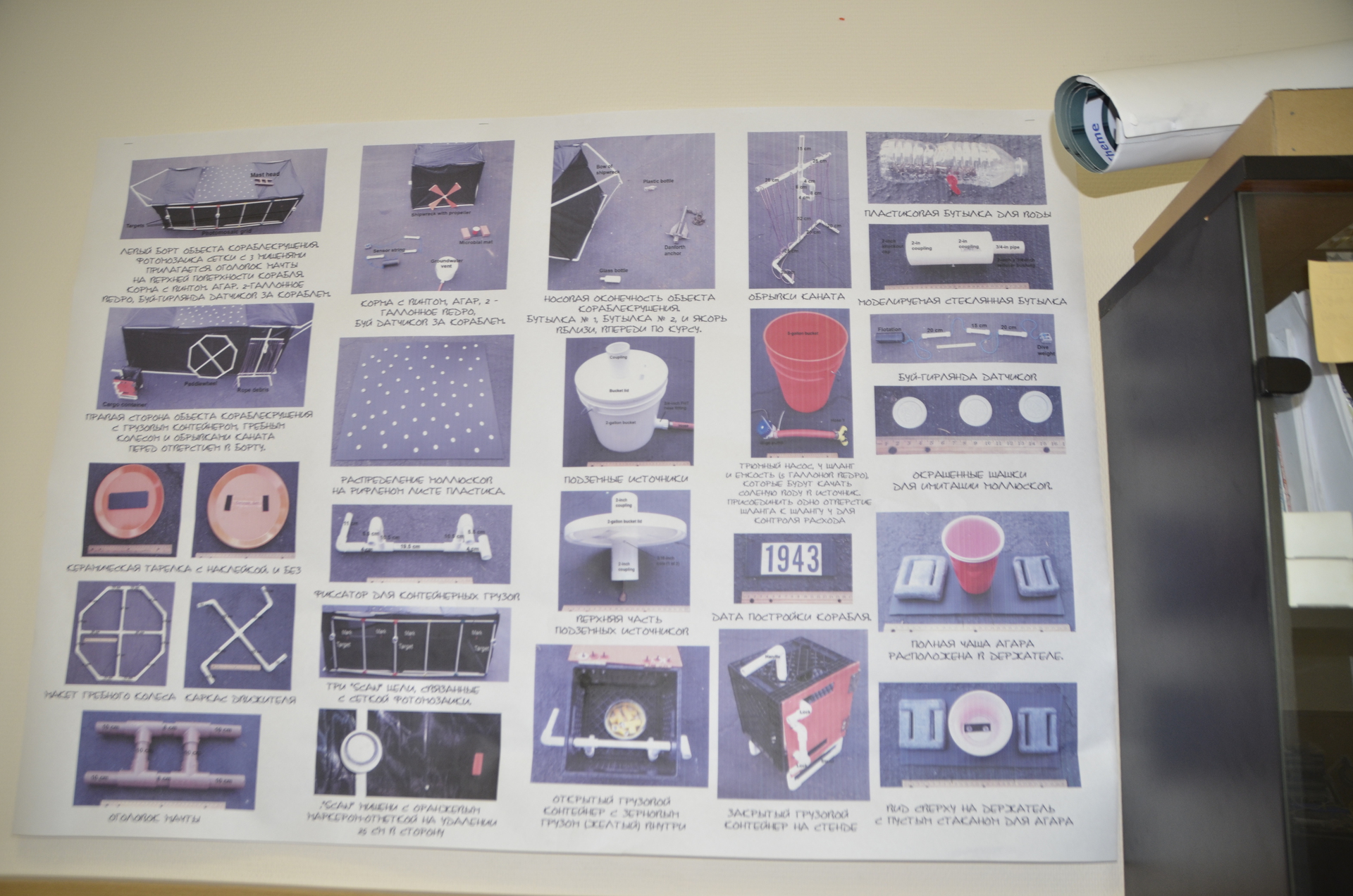
実験室の壁にあるすべてのタスクのリスト
毎年、競技会には、水中の乗り物を必要とする水中の実際の問題とタスクに関連する特定のテーマがあります。 今年の課題は、グレートアメリカン湖の1つであるヒューロン湖の底を調べることでした。 湖の底には、多くの沈没船がそのまま残っていました。 装置の使命は、3つの段階で構成されていました。難破船の調査、底部での科学研究、残骸の底部の清掃です。 もちろん、競争自体は実際の状況のシミュレーションにすぎないため、デバイスは湖ではなく、深いプールで泳ぎ、その底には難破船のレイアウトやその他の底装置が設置されました。 最初の段階では、船の種類、建造年、登録港を特定するために、難破船ゾーンを調査する必要がありました。 2番目の段階には、船の表面で成長した軟体動物の数のカウント、水中源からの水の伝導率の決定、ゼリー状の生体材料サンプルの底からの持ち上げなどのタスクが含まれます。

わずかに停滞しているため、カビの生えたテストゼリーグラス
第3段階では、湖の底からゴミ(ガラス瓶とペットボトル)と沈没船の重鋼アンカーを上げる必要がありました。
水中ですべてのタスクを正常に完了しても勝つには十分ではないことに注意してください。 水中ミッションは、合計600のうち320ポイントしか「コスト」がかかりません。競争は、チームが水中操業の入札に参加する民間企業の代わりに参加する必要があるように設計されています。 つまり、各チームは審査員に自分自身を上手く提示し、なぜ自分の装置とチームが最もうまく作業を実行できるのかを正当化する必要があります。 コンテストのこの部分は、エンジニアリングとコミュニケーションと呼ばれ、技術レポート、エンジニアリングプレゼンテーション、ポスターという3つの項目で構成されています。
技術レポートは、デバイスとその開発プロセスの詳細な説明、技術的特徴(「機能」)を含む25ページのドキュメントで、水中ミッションを正常に実行することを保証します。 この文書は、競技の約1か月前に準備し、審査員に送付する必要があります。 テクニカルレポートでは、最大100ポイントを取得できます。
ポスターでは、チームは簡潔に、ただしチームとデバイスに関する情報にカラフルに適合させる必要があります。 また、ポスターはコンテスト中に審査員によって評価され、チームは最大50ポイントを獲得できます。
エンジニアリングプレゼンテーションは、専門家の審査委員会の前にいるチームによる口頭プレゼンテーションであり、競合他社に対するこの装置の利点についての話をします。 プレゼンテーションは100ポイントの価値があります。
残りの30ポイントは、最初の試行で、安全性と規制への準拠についてデバイスのテストに合格したチームに与えられます。
したがって、すべてのポイントを慎重に準備するだけでチームが勝利することができます。
開発開始
私はプロジェクトに受け入れられましたが、思い出させてください、それは2月の初めかそれ以降のどこかで、物事はあまり良くありませんでした:前のチームが卒業し、それから少なくとも何らかの形ですべてがどうあるべきかを想像した人は2人しかいませんでした。 残念ながら、新しいチームは実務経験がほとんどなく、多くの人が最初の実際のプロジェクトでした。 古いチームは動作中のロボットを置き去りにしたので、完全に機能しました。 しかし、残念ながら、1つのロボットを2回続けて競技に参加することは歓迎されないため、新しいチームのタスクは新しいロボットの開発と組み立てでした。 また、この学年の最初の学期はほとんど空で過ごしました、そして、一般的な学問的な負荷を考えると、競争の前にわずか6か月しか残っていませんでした。
プロジェクトでの私の仕事には、Arduinoプラットフォームに基づいたオンボードエレクトロニクスソフトウェアの作成が含まれていました。 この選択は、ほとんどの参加者がプログラミングのみを学んだという事実によって正当化され、そのようなプラットフォームが最良の選択でした。 私は、純粋なMKプログラミングの愛好者として、最初は抵抗しましたが、すべてのボードは既に設計されており、何も変更する時間がなかったため、最終的にこの選択に同意しました。
実際、これがすべての始まりです。残念なことに、私は長い間この問題に取り組みましたが、ほぼ1か月半後にようやく、すべてが最終的にどのように見えるかを理解しました。 繰り返しますが、トレーニングの負荷が影響し、完全な力で作業することはできませんでした。
技術的な詳細について少し説明します。 私たちのロボットの電子機器は、円筒形のプレキシガラスのケースに置かれ、両側が密閉されたカバーで閉じられた、いくつかの丸いプリント両面ボードの塔でした。

電子タワーの2つの部分
電子機器のハウジングのカバーの固定はネジなしで行われるため、組み立て/分解は非常に迅速に行えます。 すべてのボードは同じピン配列の同じコネクタを備えているため、不適切なアセンブリの可能性が排除されます。 この概念は以前のロボットから取られたものであり、私の意見では、この状況では非常に便利です。 タワーは、メインコントローラーボード(Arduino Mega、ローターモータードライバーボード、セカンダリ電源ボード、デバイスコントロールボード(マニピュレーター、ライト、圧力センサー、カメラドライブ)、加圧コネクター付きの2つのインターフェースボード、両側に1つずつ)で構成されています。 ロボット自体には、ベクター形式で8つのローターモーターがあります:垂直4、水平4。

ロボットの本体の上部。 1つの垂直および2つの水平ローターモーターが見える
また、パイロット用と画像処理システム用の2台のカメラがあるカメラボックスもあります。 2つのマニピュレーターとライトもあります。
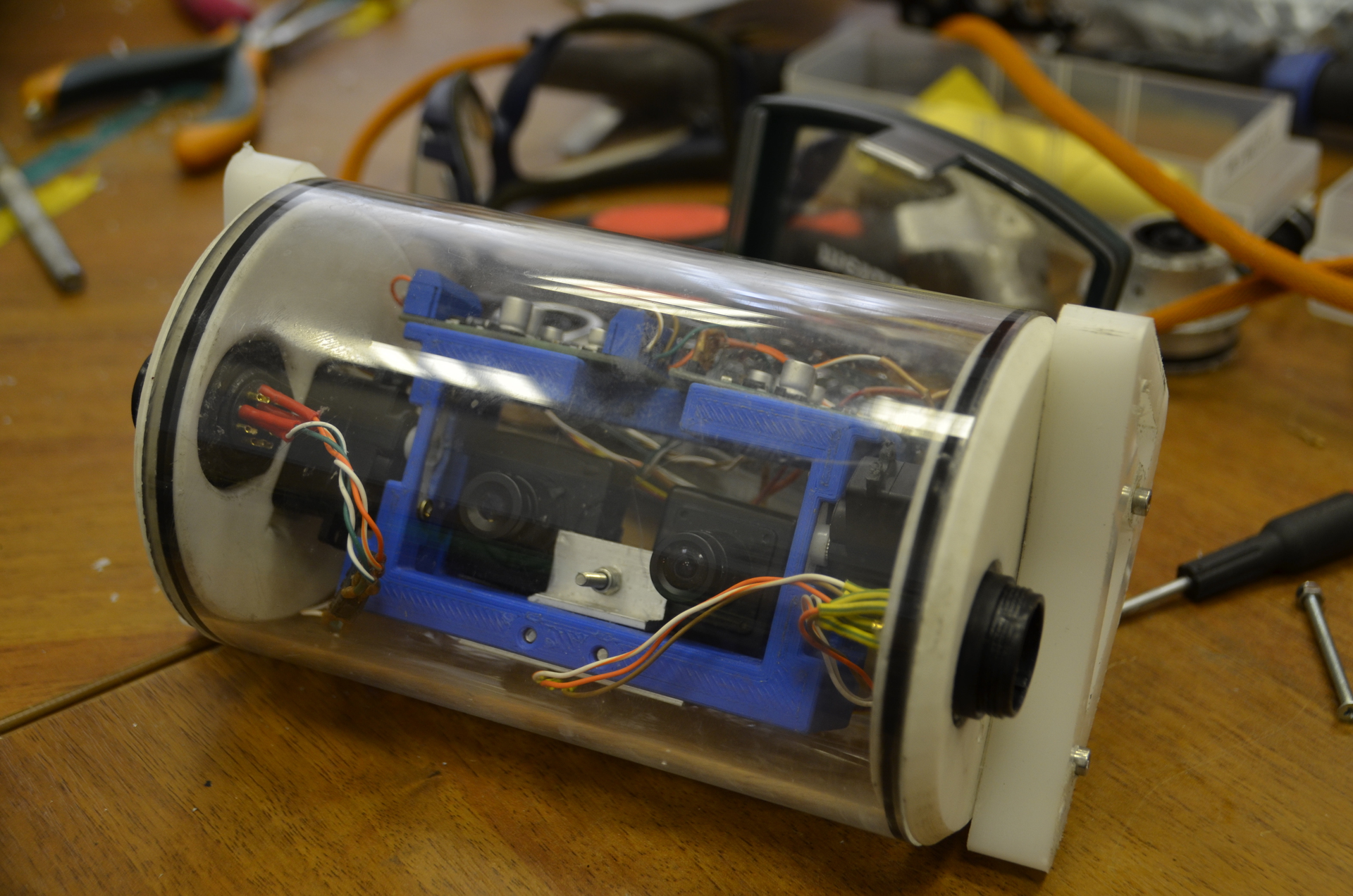
カメラ本体、未加工オプション
Vectornav VN-100センサーを使用して、空間の方向と安定化を実行します。 ロボットとの通信は、当社が開発したシンプルなプロトコルに従って、RS-485インターフェースを介して行われます。 また、2 kWの電源、内蔵PC、カメラからのビデオ用の3Dモニター、ダッシュボードをレンダリングするための小さなタッチスクリーンを備えた、前のコマンドの残りのコントロールパネルがあります。

制御盤
ロボットのさまざまな部品の開発、組み立て、テストと並行して、競技会への登録、事務処理などが進行中でした。 5月初旬、米国大使館でビザの面接を受けました。 このイベントは、私たちのほとんどが追加の検証のために送られただけでなく、翌日、現在の電子機器を終了してデバッグする時間がなかったため、電子機器を使用することに決めたため、重要でした完全に動作しているため、以前のロボット。 原則として、決定は非常に論理的でしたが、新しい電子機器は60-70%の準備が整っていたため、少し面倒でしたが、方向、ローターモーターの制御、グリップ、ライト、カメラの位置があったためです。

モスクワに残っているのは、数ヶ月の仕事の結果です。 チューリップの中は偶然でした
しかし、私の結果を守る状況があったので、すぐに別のタスク-導電率センサーに切り替えました。 初めは、これはセンサーが突き出た小さなブロックであり、パイロットはシミュレートされた熱水源に設置されると想定されていました。 しかし、その後、設計がわずかに変更され、データ処理ユニットが岸に残り、センサーセルのみが底に沈みました。 知らない人のために、水伝導率センサーは2本のグラファイトロッドで構成されており、その間に交流電流が導入されます。 可変-ロッドへのイオンの「付着」を防止します。 次に、1本のロッドから、この交流電圧がダイオードを介してADCに供給され、電圧レベルが測定され、さらに処理されて導電率値が得られます。 みんなは回路を自分で作りました-ブレッドボードに組み立てられて、どんな種類の作品に見えました。 ブロックに立つnano arduino用のソフトウェアを作成する必要がありました。つまり、ADCを介した電圧レベルの測定とこのデータのコンピューターへの配信を整理する必要がありました。そのために、画面に表示するためのソフトウェアを作成する必要がありました。 また、導電率値を調整するには、導電率センサー内に温度センサーを配置する必要がありました。

完成した導電率計
おもしろいことに、温度センサーを正常に動作させるのに多くの時間を費やしてから離れる前に、現在では一般的に導電率を決定する必要があり、この値は温度に依存しないため、不要であることが判明しました。 原則として、これはプロジェクトに取り組んでいる間に私たちがコミットした多くの学校の1つでした。 センサーのシンプルさにもかかわらず、私はそれに多くの時間を費やしました。 わずかに不器用なアナログ回路に加えて、どうやら自分自身の生活を送っていたようだから、例えば温度センサーやUSB-UARTアダプターの不具合など、他の多くの問題があった。 センサーからのデータを処理するソフトウェアは、文字通り最後の瞬間まで完成しましたが、それについては後で詳しく説明します。
ロボットが組み立てられた後(5月中旬)、プールに何度か行きました。ここでは、スポーツコンプレックスのプールのトラックの割り当てに貢献してくれた大学の管理者に感謝する必要があります。
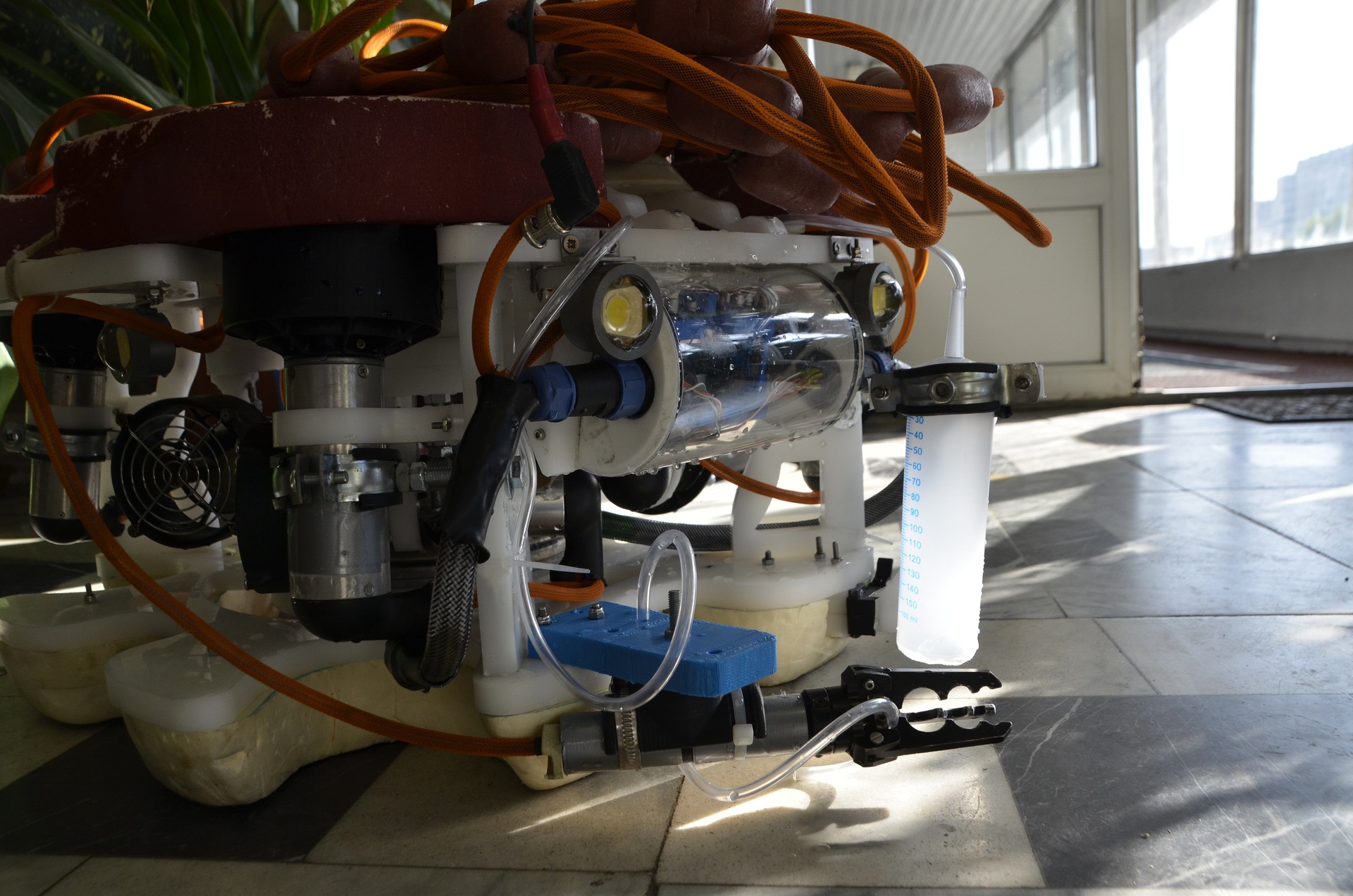
最終オプション
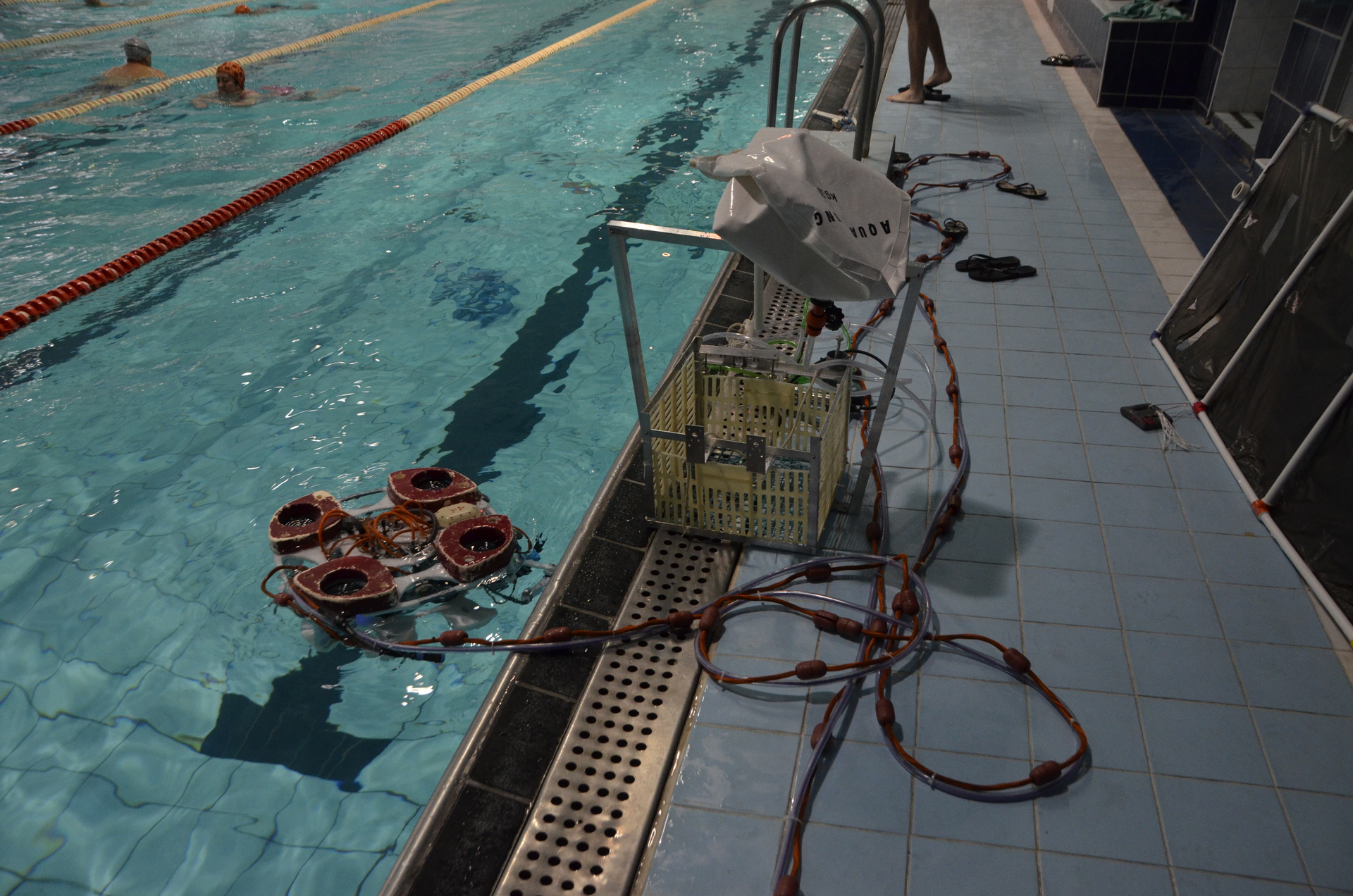
出発直前のトレーニング。 主なものはスリッパを忘れないことでした
テスト中に多くの問題がありました:リーク、接続の喪失、ボードの焼損。 そのため、ビデオリンクが失われた。 カメラユニットを分解すると、ビデオカメラの信号変換ボードに焼損したダイオードが見えました。 解決策は、ケーブルをシールド付きツイストペアケーブルに交換することです。 また、アナログビデオ信号の干渉も排除しました。
リークによりドライバーのパワートラックが完全に燃え尽きると、エンジンが停止しました。 すぐではないことに気付きました ロボットは動作し続け、遅れに沿った牽引はまったくありませんでした(遅れは横軸に沿った平面平行移動です)。 最初は、ネジがシャフトマウントから外れたと思っていましたが、実験室に来て、すべてが非常に悲しいことがわかりました。

ローターで焼かれた電源経路
などなど。 結局のところ、出発時にはチームの本格的なトレーニングを1回も行うことができず、設定された時間内にすべてのミッションを完了することができませんでした。 また、プールでのトレーニング中に、パイロットが絶えず流れに対処しなければならなかったことも興味深いことでした。 しかし、判明したように、学ぶことは困難でした-戦いが簡単で、大会が開催されたプールには流れがなかったので、パイロットがタスクを完了するのははるかに簡単でした。
戦闘ミッションに出発する
出発する前の週は、予想通り、非常に波乱に富んだものでした。 多くの人が試験を受けたという事実に加えて、出発の準備をする必要がありました。 さまざまなデバイス、ロボット部品、私のセンサー、その他多くのものがすぐに完成しました。 出発の日に、男たちがスーツケースにロボットを仕分けして梱包している間に、私は買い物に行き、さまざまなジャンクを買いました。

スーツケースの梱包。 すべてがすべて到着することが非常に重要です
大学を去るたびに、20分で終わった激しい豪雨に見舞われたことは面白いです。 私たちは午前5時に飛行機を持っていたので、前の日はすべて、実験室でトレーニングキャンプで過ごし、夜に空港に行き、朝に飛びました。 ロボットに加えて、ツール、オシロスコープ、ロボット用のスペアパーツ一式などを提供しました。 その日の動力計が主要なツールの1つであったため、私は過負荷を非常に心配していました。 彼らは緊急にポスターを印刷し、審査員に見せるための書類を準備しました。 結局、大学の車でシェレメーチエヴォに到着し、そこで他の人たちと会い、スーツケースを荷物に安全に引き渡し、いくつかの過負荷を支払い、アムステルダムに飛びました。

出発の5時間前
アムステルダムでは、非常に短い乗換を待っていました。その結果、あるゲートから別のゲートへの軽快な走りと警備員とのさりげない会話の後、デトロイトに飛ぶ飛行機に乗っていました。
コンテストは毎年新しい都市で開催されます。前回はシアトル郊外のフェデラルウェイの町でしたが、今回は恵まれず、ヒューロン湖のほとりにあるミシガン州北部のアルペナの町を待っていました。 私にとって、これは私のアメリカへの最初の訪問であり、この国を初めて訪れるほとんどの人とは異なり、私の知り合いは最も純粋な奥地から始まりました。
1万人がアルペナに住んでいますが、これは私の故郷よりもほぼ10分の1です。 そのため、このレベルの都市での国際大会は本当に大きなイベントでした。 私が見たものの印象については説明しません。興味を持つ人はほとんどいないと思います。 私は一つのことを言います:私は街とその住民が信じられないほど好きでした。 おそらくアメリカ人はみんなに笑っているかもしれませんが、路上で出会った人々は、私たちがチームの一員であり、さらにロシアからもそうであると知り、笑顔で、幸運を祈りました。
それで、デトロイトに到着した後、私たちはすぐに2台のレンタカーを拾い、アルペナに向かいました。 ほぼ5時間の旅行の後、ようやくホテルに到着しました。 アルペナは小さな町であるため、ホテルは2つしかありません。ホテルには競争の参加者が非常に均等に収容されています。 アメリカ、インドネシア、中国、カナダのチームもホテルに住んでいた。 最初の日は、ロボットの組み立てに完全に忙しかった。 各チームは独自の方法でこれを行いました。幸運で、数字が入った人は部屋のすぐ内側にあり、不運で数字は外にあり、部屋にロボットを組み立てました。
これらの人はラッキーです、彼らは大きなテーブルとたくさんのスペースを持っています
幸運ではなかった。 予想通り、ある部屋は小さなワークショップに変わり、そこで誰かが常に何かをしていました。

大きなテーブルはありませんが、より快適でした
アクセス可能なプールがないため、バスルームでロボットの密閉を確認しました。
1日目と2日目はすべてホテルで過ごし、ロボットとアクセサリーを収集しました。数回だけ食べに行き、詳細と登録のために店に行きました。
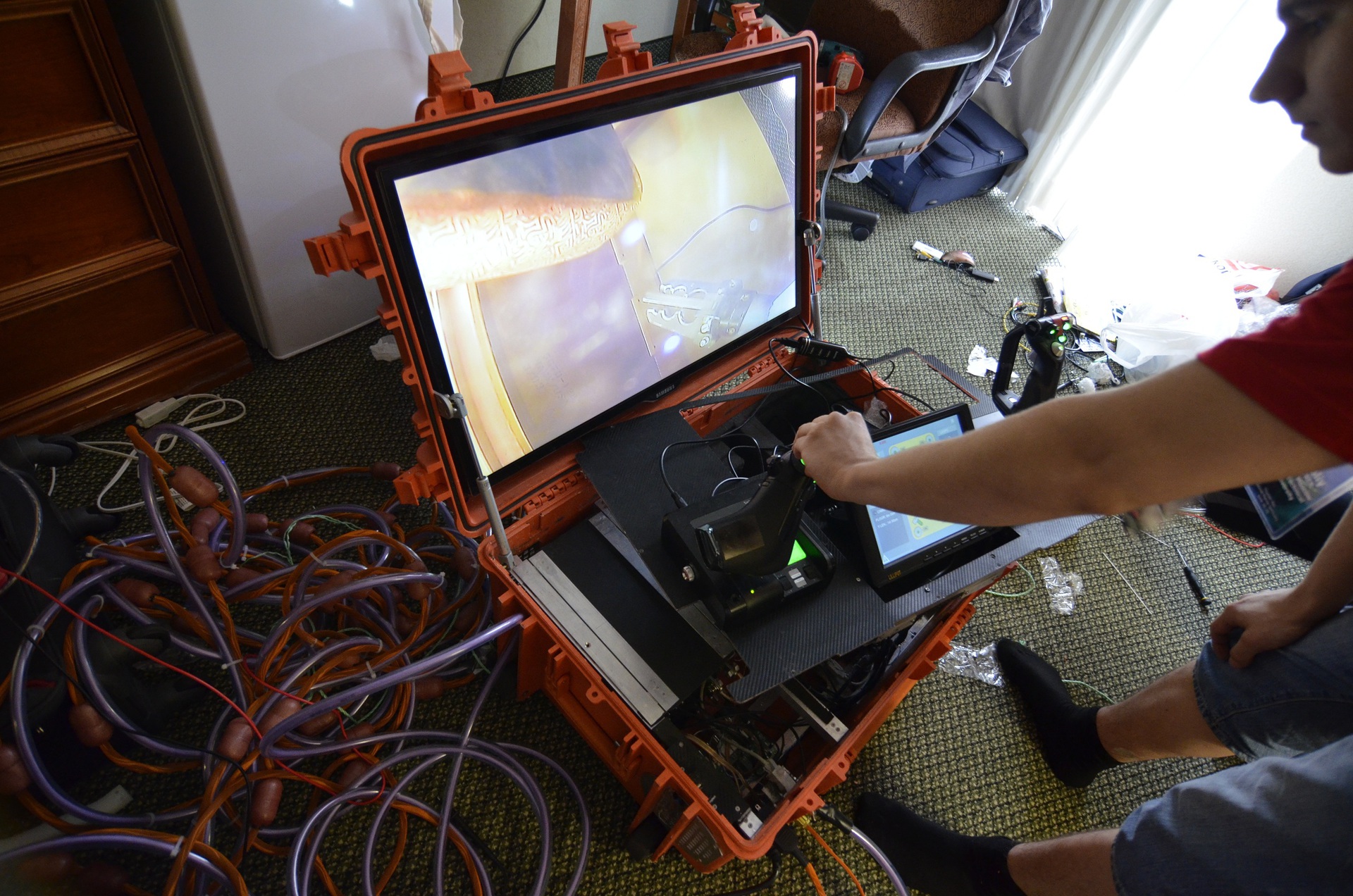
組み立て済みのロボットでビデオを確認する
3日目は競技の初日でした。 この日は、開会式、ロボットの安全確認、15分間の試験的な打ち上げが予定されていました。 私たちはオープニングに少し遅れて、チームに電話をかける数分前に到着しました。 当時、私はすでにチームのテーブルの間にカメラを持って走り回り、ロボットとその詳細を撮影していました。 残念ながら、その時点では、すべてのデバイスがテーブルに載っていなかったため、いくつかの面白いメカニズムを除いて、特別なものは見つかりませんでした。
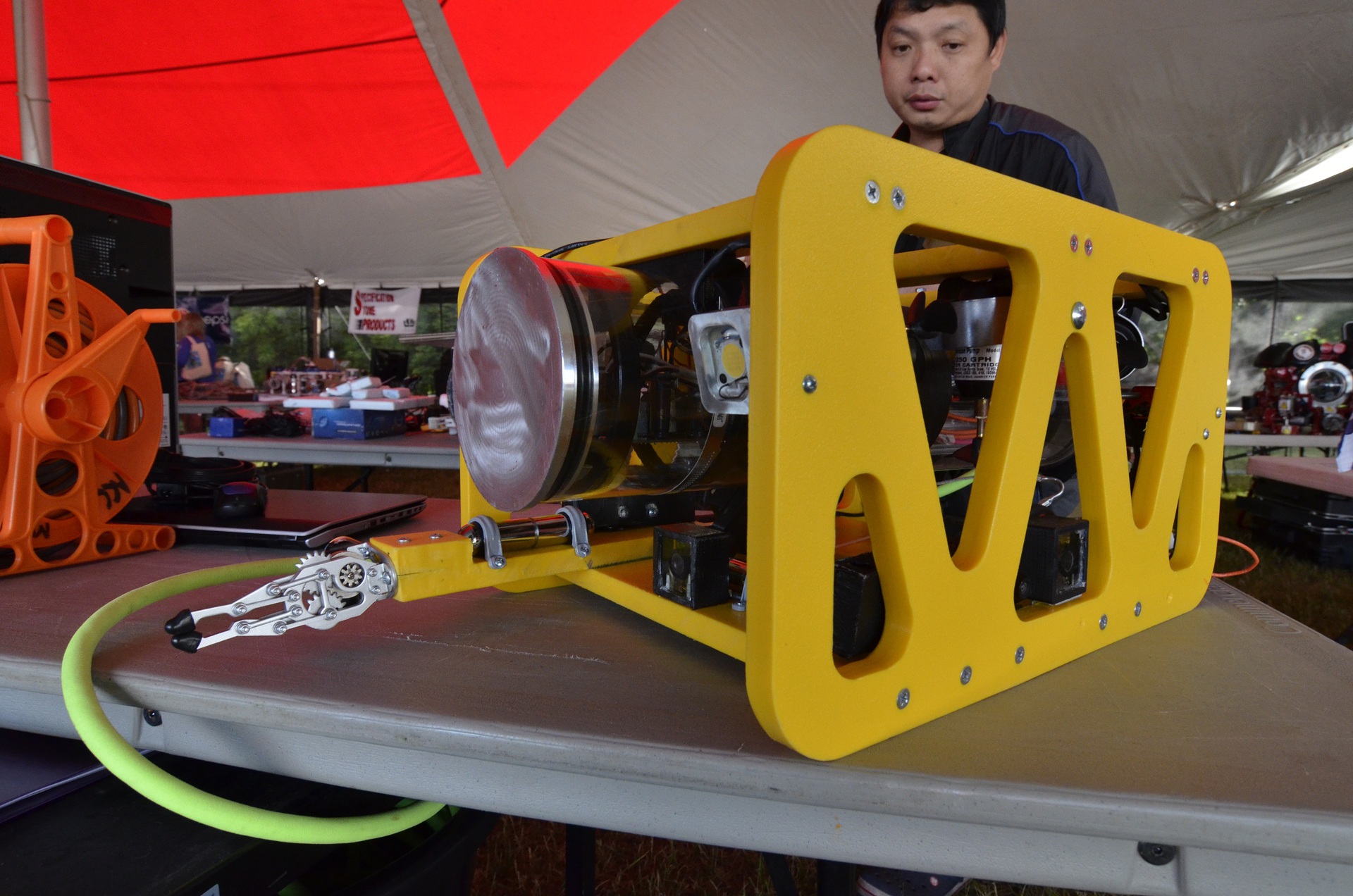
面白いグリップを備えた非常にきちんとしたロボット
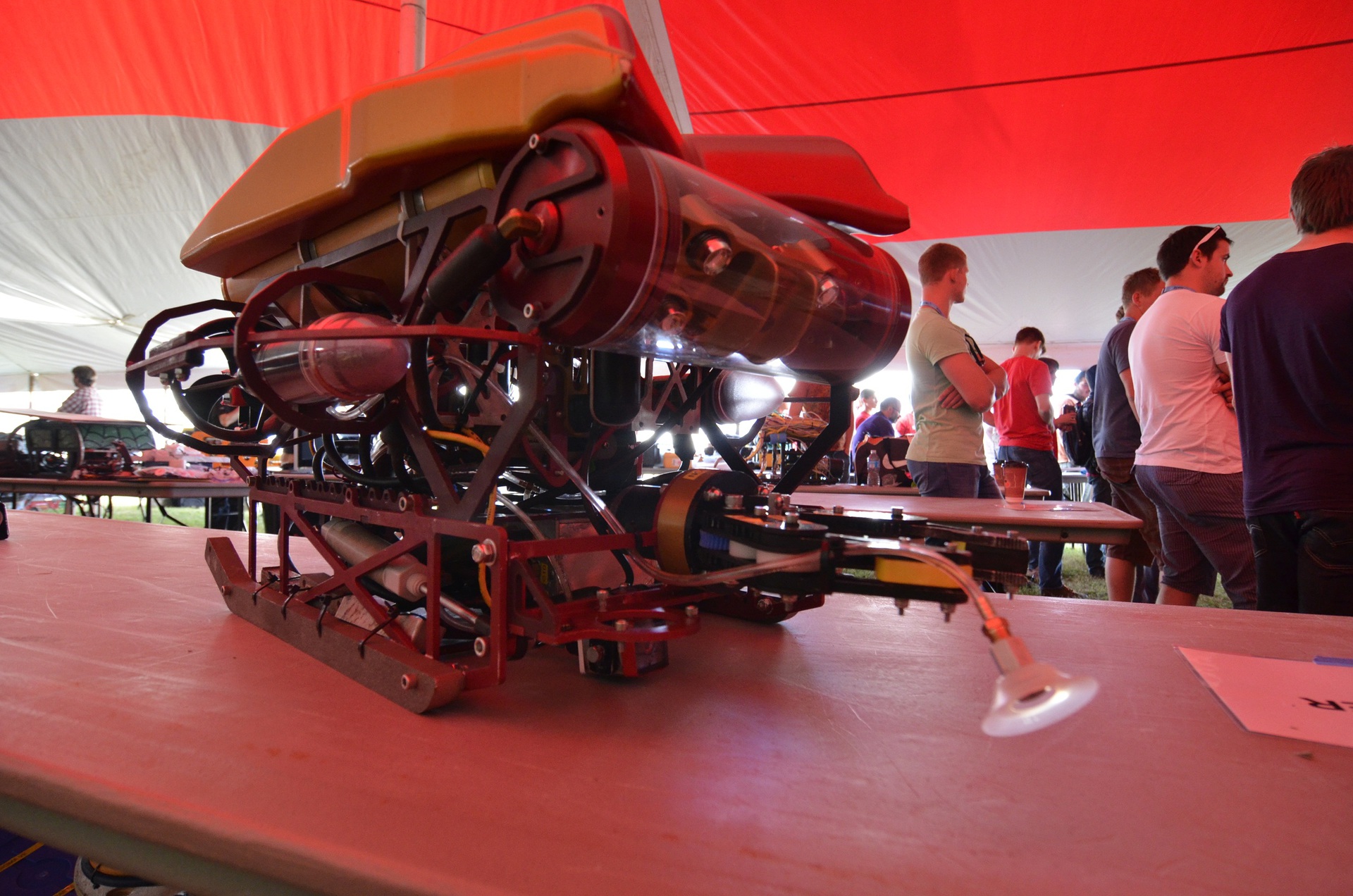
アイアンマンとして様式化されたユニークなロボット

4本の指と巨大なエンジンにより、このロボットは他とは一線を画しています
開会式の後、すべてのチームは引き続きセキュリティチェックのためにロボットを準備しました。 私たちも例外ではありませんでした。 私たちのロボットには、鋭い角や回転する部品などに関する警告が完全に貼り付けられていました。 それにもかかわらず、チェックする前に、私たちはスクリードの鋭いスクラップをきれいにし、鋭いコーナーをファイリングして、裁判官が文句を言わないようにしました。 原則として、すべてを完璧に実行したため、両方のセキュリティチェックを問題なく実行しました。

最後から2番目のチェックは完全に合格しました
セキュリティチェックの最大スコアである最初の小さな成功に満足し、さらに進んで喜んでいます。 私が言ったように、さらにいくつかのチームがホテルに住んでいた。 それで、オレゴンの男たちはプールがある地元の学校に同意したので、私たちはそこで泳ぐことができました。 しかし、とてもいい人なので、公式のテストダイブの前に泳ぎたい人は全員、事前に同意して、ホテルに通知しました。 そのため、より長く泳ぐ機会を逃さないことにしました。 そのため、セキュリティチェックの後、学校に行き、リモートコントロールの迅速なレイアウトとロボットの準備を模倣しようとしました。 うまくいきませんでしたが、少なくとも泳ぎました。

金の重さに見合うエクストリームトレーニング

競技のシミュレーションの欠如は問題ではなく、ただ泳ぐだけでも良い
しばらくして、残りのチームが到着し、主催者が校正液を入れて導電率センサーを校正することがわかったため、しばらくして私と数人が導電率計の校正に行きました。その場所に到着し、提供された液体にセンサーを下げると、不快な事実が見つかりました。つまり、提供された液体は非常に高い導電率であるのに対し、センサーは著しく低い導電率を持つ液体用に構成されました。夜の新しい計画を理解し、校正用のサンプルを収集してホテルに向かいました。その時、残りの男たちは学校から戻ってきて、競技用プールで15分間泳いでホテルに到着しました。
初日の夕方、私たちは次の日に予定されていたプロジェクトのプレゼンテーションの準備に費やしました。残りの人たちのためにテキストを翻訳してから私の文章を学習するまでの間に、導電率センサーを較正し、そのソフトウェアを追加しました。その結果、センサーは較正されたように見えましたが、過熱に問題がありました。1〜2分後、回路内のオペアンプが過熱し、故障に至りました。原則として、これは大きな問題ではありませんでしたが、依然として不快でした。

プールで働くダイバーからのクールな写真
2日目は、この日のプロジェクトの発表に加えて、他のチームがすでに真の試みを行っていたため、最初の真に競技的な日でした。私たちは非常に幸運で、2つの試みが2日間に散らばっていたため、何かが起こった場合は、何かを修正して修正する時間がありました。それは面白い出来事から始まりました:私と私のルームメイトはホテルで単に忘れられました。彼らは、彼らがすべてを一緒に持っているかどうかをチェックし始めたとき、私たちを覚えていただけで、導電率センサーがなかったことが判明しました。チームワークのためにわずか5人。原則として、この場合は張力がわずかに低下しました。プレゼンテーション自体について特別なことはありません。私たちはテントに入り、ロボット、リモコンを入れ、準備されたテキストを話し、その後、より自由な形式で裁判官と話し、ロボットのさまざまな興味深い詳細について話しました。私はプレゼンテーションの審査員が本当に好きでした。 3人の審査員はすべて、特定の分野で豊富な経験を持つ専門家です。たとえば、そのうちの1人は、水中ロボットの分野で25年の経験があります。したがって、彼らの評価はかなり客観的であり、彼らは明らかに「彼らの脳をほぐす」ことに成功しません。しかし、一般的に、誰もが結果に満足しており、評価はすぐには発表されませんでしたが、感情は非常に肯定的でした。プロジェクトのプレゼンテーション後、最初の試行の約3時間前に、何かを終えなければならなかったので、部屋に行きました。それから何かがありました。部屋での最初の試みの2.5時間前に文字通り入り、私は分解されたロボットを見ました、そして、みんなは電子ボードを吹き飛ばします。判明した昨日のダイビング中に船体に水が漏れて、最初の試みの数時間前に今日だけ発見された。ですから、その時の雰囲気は控えめに言っても緊張していました。しかし、最後の瞬間にすべてが乾燥して整頓されました。残念ながら、最近、特に競技会の時には、多くの写真を撮ることができなかったため、特別なものは何もありません。
ミッションを完了する試みはどうですか。チームは駅に近づき、審査員と話をし、質問をし、再び規則に耳を傾けます。次に、タスクの準備、つまり電源の接続、すべての構成などを行うために5分間が与えられます。

試行を開始する前にルールをもう一度聞きます
5分後、ジャッジはすぐにメインタイムを検出します。チームは2つの部分に分かれています。 1つ目はコンソールにあり、2つ目はプールの横にあります。互いに通信することはできません。言えることは、ケーブルの発行を増やすことだけです。これは、デバイスの動作を非常に深くシミュレートし、パイロットの先端が横で動作するのを防ぐために行われます。ミッションの15分間の期間の後、チームは荷物をまとめてステーションを出る5分間を与えられます。時間通りに出発する時間がない場合は、ペナルティポイントを得ることができます。また、通常の時間の終わりにロボットがまだ水の中にあるか、その機器の何かが底に残っている場合、ペナルティポイントを得ることができます。
私たちは自信を持って専門的に試みを始めました。事前に役割を明確に分散しているため、誰が何をしているのかがわかっていたので、お互いにあまりコミュニケーションをとることもしませんでした。ただし、これは長くは続かず、約2分で、ジョイスティックからのPS / 2コネクタの接触が曲がることがわかりました。これを素早く修正するドライバーを見つけましたが、これはほんの始まりにすぎないことがわかりました。さらに、何らかの理由で、ロボットとの接続がなく、かなり長い間存在しなかったため、メインタイムから最初の2分間を失いました。その後、すべてがもう少し成功し、いくつかのミッションを完了することができました。増量剤の重心が高いため、センサーがボトルから安全に脱落しました。時間の終わりに、私たちはすぐに荷物をまとめて駅から捨てました。 135ポイントの結果は一部のチームの結果ほど悪くはありませんが、200ポイントに達する可能性があり、影響を受けた最初の2分を失った。
概して、すべてのエラーは明らかでした。数分後、彼らは非常に活発な議論を開始し、それはホテルおよびホテル自体までずっと続きました。私たちの主な間違いは、事前にすべてをチェックしなかったことでした。つまり、ホテルから到着してすぐに出発したため、コネクタが曲がるなど、あらゆる種類の問題がありました。これに基づいて、翌日には少し早く到着し、テーブルを見つけ、そこにあるものをすべて集めて、オープンな形ですでにすべてをステーションに運ぶことが決定されました。さて、導電率センサーの重心を過小評価するなど、さまざまな小さな妨害。このすべての後、私たちはロボットを完成させるために誰かが残っているホテルに行き、残りは店に行き、湖に沿って歩きました。
私が言ったように、2回目の試みは、競争の最終日である3日目の午前10時から30日に予定されていました。少し早く起きて、その場所に到着し、計画に従って、すべてを分解し、ロボットの作業能力を3回テストした後、開始しました。今回はそれがどのようなもので、どのようになるかを既に知っていたので、コントロールパネルでコンピューターが再起動するのを待っていた3分で準備を整えました。しかし、それでも、ダウンロードの終了とメインタイムの開始を静かに待って、タスクを完了し始めました。
更新された導電率センサーは、「熱水泉」(塩水タンク)で正常に故障し、驚いたことに、水の導電率を正しく測定しました。さらに、すべてが非常にうまくいきました。彼らはアンカーを持ち上げ、船に乗り込み、ホームポートでプレートを持ち上げました-など。彼らはボトルを拾おうとしたが、すぐにこのベンチャーを去った。唯一のマイナスは、容器のすべての寸法を正確に測定することができなかったため、その上で成長して多くのポイントを失った軟体動物の数を判断できなかったことです。しかし、他のすべては非常にうまく行われ、最後の瞬間にロボットを水から引き上げることができたので、彼らはミッションを正常に完了しました。 2回目の試行の結果は245ポイントであり、これは非常に予期しない結果であり、少なくとも200ポイントを獲得すると予想されていたという事実を考慮しています。
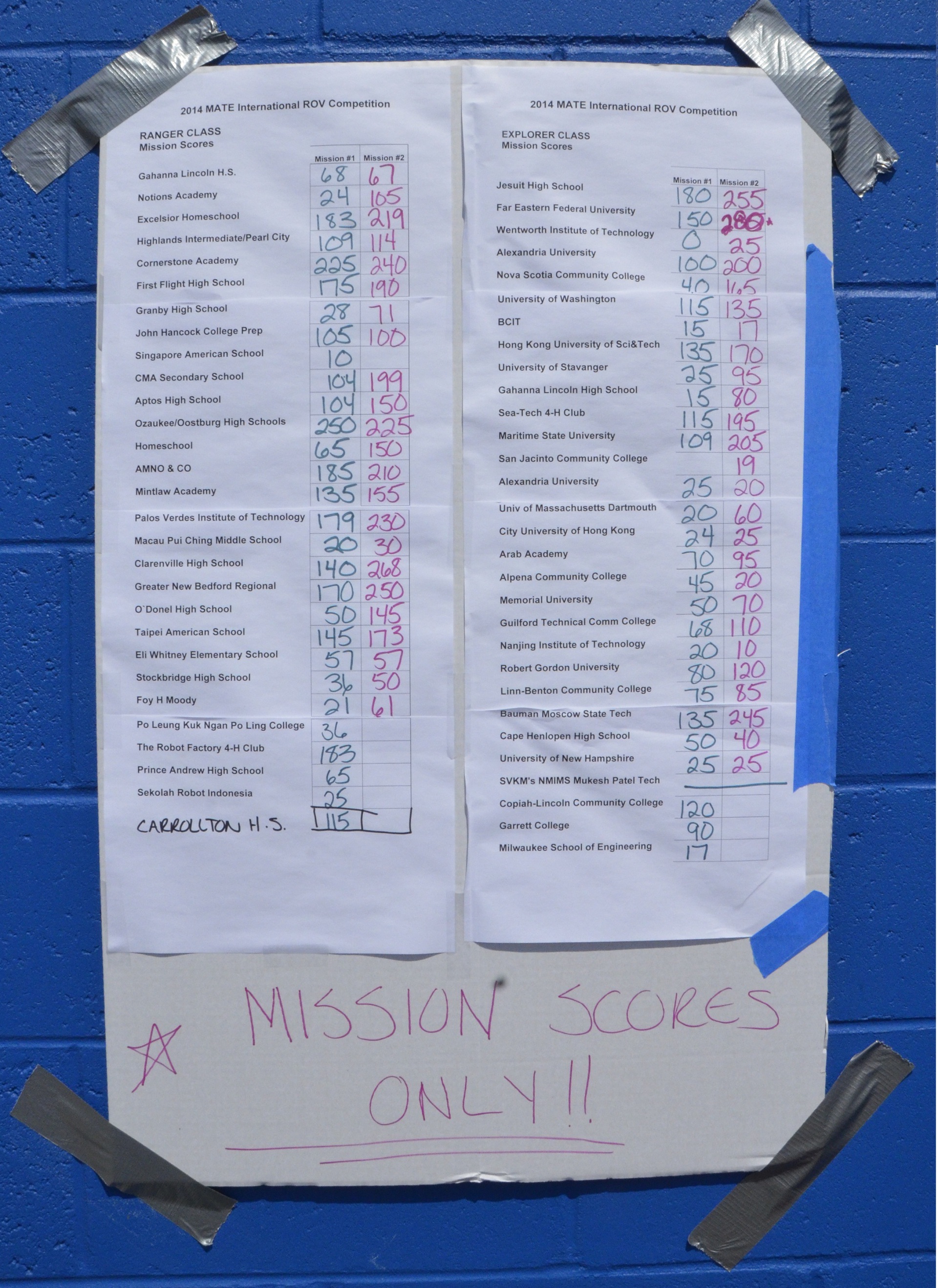
2回の試行の結果。

2回目の試みの後、 誰かが2番目のチームに到達することはありませんでし
た同じ日の夕方、コンテストの勝者が授与されました。これらの競技の興味深い特徴は、多数のノミネートです。裁判官は誰でも自分の指名を作成し、勝者を選ぶことができます。また、純粋に技術的な指名だけでなく、最高のリーダー、最も困難を克服したチームなどで賞が授与されることも興味深いです。一般的に、賞品を獲得するために優れたロボットを用意する必要はありませんでした。

私たちは、ロボットからの3Dビジョンで昨年受賞したイノベーション賞を手にします。今年、Oculus Riftを使用してデバイスを整理したチームに賞が贈られました
すべてのテストの結果は事前にわからないため、陰謀は最後の瞬間まで続きます。ただし、ミッションの結果に基づいて、いくつかの仮定を行うことができます。ミッションの結果によると、私たちは3番目であり、したがって、この場所に焦点を合わせましたが、最終的な結果は任意である可能性があります。私たちのチームは、最終的に3つの賞を獲得しました。セキュリティの指名で、少し予想外でしたが、かなり論理的な結果でした。 2番目の賞は最高の技術報告でした。技術報告は彼らのビジネスであったため、最終的にモスクワに滞在した人々に感謝します。そして3番目の賞-総合順位で2位。また、まったく予想外ですが、非常に素晴らしいことですが、すべての面でのトレーニングは結果をもたらしました。

最優秀テクニカルレポートにノミネートさ

れた総合順位で2位

「安全保障のための」ノミネートの勝利
私たちは極東からチームを追い越しました。男たちはミッションに280ポイントを持っていましたが、残りのポイントの結果は私たちのものよりわずかに悪かったです。そもそもイエズス会高校のチームでした。昨年の受賞者である25歳以上の巨大なチームは、ミッションで255ポイントを獲得し、最高のポスターで賞を獲得しました。授賞式は非常に家族的な雰囲気の中で行われ、主催者である主催者は常に冗談を言っており、一般的にやや非公式な雰囲気を維持しており、私たちは大きな家族であるという印象を与えました。

受賞したチームには数値的な優位性
があり、賞に続いてさまざまなチームでの写真撮影が行われ、その後ホテルで行われたお祝いが続きました。

アルペナの学校を背景に、

受賞したことは 見事であり
、6日目に帰宅しなければなりませんでした。再び車でデトロイトまで5時間、その後モスクワまで2便。そして、誰かが休息し、誰かが軍事訓練に行きました。

車を降ろしたりレンタルしたりする
ことで、前年の最高の結果は7位に過ぎず、今年も参加者の数が急増したため、競争の結果は誰にとっても予想外でした。何らかの形で、私たちは期待を超えました。もちろん、何かをもっとうまくやることができ、勝者に対する私たちの遅れはそれほど大きくはありませんでしたが、そのような名簿に初めて出場したチームにとっては、そのような結果は信じられないほどの成功です。たぶん、真実は新参者のためです。
最後に、私は、次の競争のための新しい装置の設計をすでに開始していると言いたいと思います。新しい電子機器、新しいローターモーターを備えた新しいロボットを作成し、通常はすべてをより高いレベルで実行するように計画されています。そのため、私たちのセンターは来年のコンテストの準備に引き続き取り組んでいます。
明らかに、そのような競争、特にそれらの準備は、貴重な経験を提供します。おそらく、これは私たちの教育プロセスにしばしば欠けているものです。したがって、私は、6か月前のその日、プロジェクトへの参加についての質問に肯定的な回答をしてくれたことを心から嬉しく思います。
そして、準備と旅行自体についての短いビデオがあります: