
高速道路でのレースのオープンソースプロジェクトとデモ。
プログラム可能なロボットのようなトピックについて話しましょう。 これはどういう意味ですか? これは、USBケーブルを介してコンピューターから簡単な方法でプログラムできるセンサーシステムを備えた完全なロボットです。 Arduino IDE開発環境とC ++言語を基礎としてみましょう。 したがって、入場の閾値は低く、プログラミングの勉強を始めた人やすでにある程度の知識を持っている人はほとんど、ロボット工学を行うことができます。 既製のライブラリ、センサーとモーターの動作を実装するクラスを使用する場合、たとえば、プログラムコードでロボットがそのような側から障害物に遭遇したことを知らせて、システムを取得し、戻って左に曲がるように頼むそしてドライブ。 または、プログラムでは、1メートル先に進み、30度右に曲がり、さらに2メートル先に進んで何らかのアクションを実行するように求めています。 これに基づいて、ロボットをより複雑なタスク用にプログラミングし、ロボットのプログラミング方法を学習するという形で、または趣味として満足感を得ることができます。 同時に、すごい効果が提供されます:)
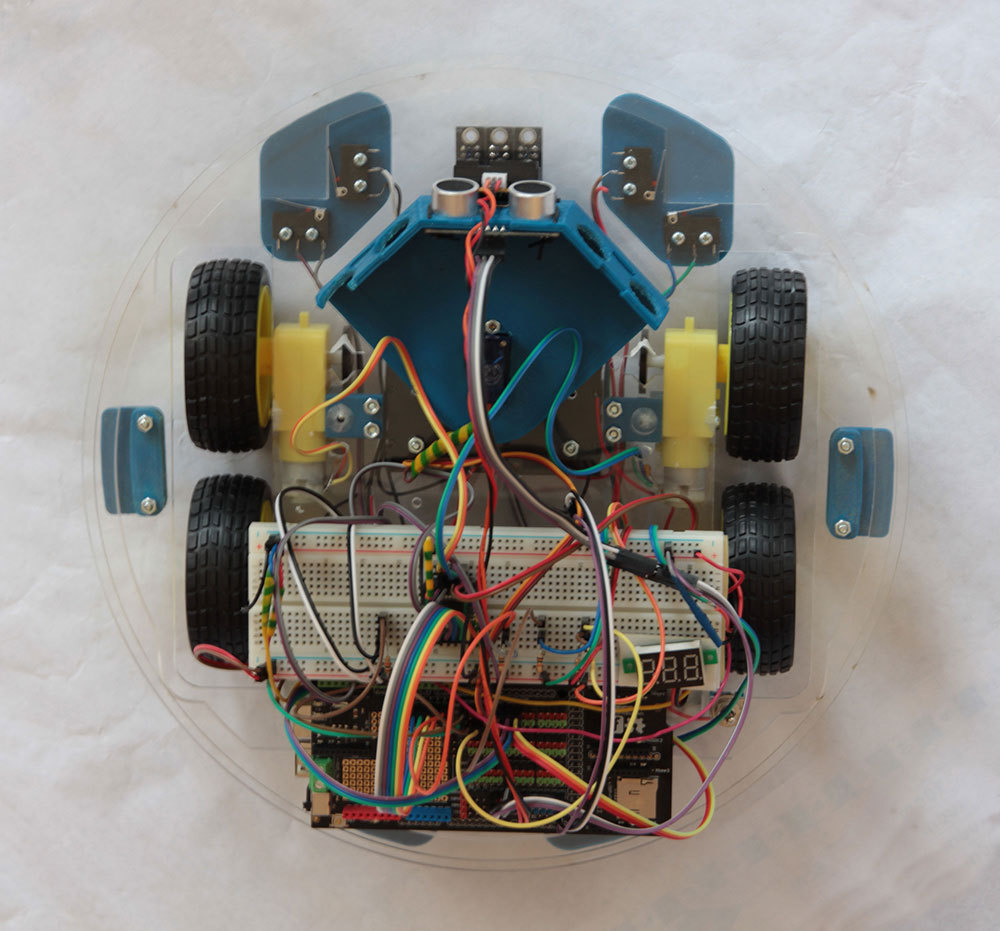
それでは、ロボット自体について話しましょう。 前の記事以降、ロボットは再構築されました。 私の開発のシャーシ設計、以前のシャーシの問題が考慮され、新しいものは優れたクロスを持ち、展開が容易です。 シャーシプレートはプレキシガラスからレーザーカットされ、残りのパーツはデザインの3Dプリンターで印刷されます。 ギアボックスは1:120の比率で供給され、低速でより多くのトルクを与え、ロボットの展開がはるかに容易になりました。
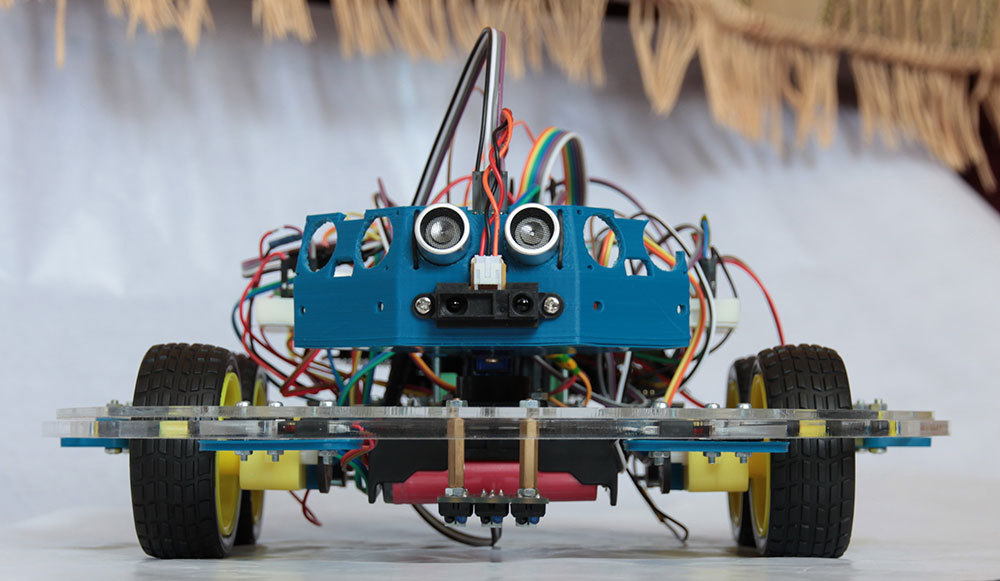
新しいバージョンの主な機能は、独自のデザインの円形バンパーの使用です。 これにより、両側の衝突を高精度で判断できます。 8個のマイクロスイッチに基づいて作成されており、写真でデザインを確認できます。 ロケーターがなくてもロボットは乗ることができます。
arduino Unoに十分な入力/出力がなかったため、エレクトロニクスも変更され、Arduino Mega ADKに切り替えられました。
ロボットの新しいバージョンは、自宅で数時間の連続動作のストレステストに合格しました。 新しいセンサーシステムは、床にワイヤが散らばっている山の中でも、ロボットが部屋を簡単にナビゲートできることを示しました。
これはどういう意味ですか? たとえば、部屋の迂回、高速道路でのレース、他のロボットとの競争、マーカーの検索など、さまざまな動きのタスク用にロボットをプログラムできます。
デモンストレーションでは、即興オブジェクトから白い紙で示されたフィニッシュラインまで任意に構成された高速道路に沿って書かれた移動アルゴリズムでロボットを駆動するタスクが選択されました。 以下にビデオでそれを見ることができます。
次のセンサーを使用してトラックをナビゲートしました:超音波距離計、赤外線距離計、バンパー、ホイールエンコーダー。 それらからのデータに基づいて、アルゴリズムは移動経路を構築します。
仕上げはラインセンサーによって決定され、カーペットなどのアパートのほとんどの平面がリノリウムを黒と定義するように設定しました。 したがって、白い紙のシートは白です。
次のビデオでは、ロボットがいかに簡単にプログラムされているかについて説明します。
オープンソースプロジェクトは、ダウンロードしてプロジェクトの開発に参加できるすべてのソースです。
また、レーザー切断用の図面と3D印刷用のファイルをcorelに添付します。 そのような機器にアクセスできない場合は、私に連絡してください。これらの部品を作成し、郵送します。
レーザー切断用のベース(厚さ3〜5mm)およびバンパー(厚さ5mm)。
3D印刷の詳細
Arduinoのソース。
理想的には、このプロジェクトの将来は、arduino上の単純なロボットとROS(robots operating system)に基づく複雑なロボットの両方をプログラミングする方法を学習するための予算ロボットのオープンソースと考えています。
ROSについて。 ロボットをプログラミングするための真に無限の可能性を提供します。 これをロボット工学の未来と考えています。 現時点では、2つの主な問題があります。それに対する予算ロボットの不足と、関連するすべての英語のドキュメントです。 最初の問題は、このロボットによって解決されます。Bluetooth、Wi-Fi、またはROSコアに接続できるAndroid電話を介して(既にBluetoothを使用してROSのラップトップに接続しようとしました)。 2番目の問題を解決する方法はわかりません。英語のチュートリアルをゆっくり勉強していますが、非常にゆっくりと進んでいます。 ロシア語に翻訳する準備ができている人々が呼ばれるなら、私は非常に感謝して、そのような仕事を組織する準備ができています。
プロジェクトニュースのあるVKontakteグループ-https://vk.com/club23358759
ロボット開発者-https://vk.com/alekseyburkov
PS:記事の下のコメントに書かれたあなたの意見は私にとって重要だということを覚えておいてください!