
ヘキサポッドロボットは、6本の脚を使用して移動するプラットフォームです。 インターネットで多くのビデオを見た後、そのようなロボットの動きを見ることが非常に興味深いことが明らかになりました。 そして、似たようなことをしたいという要望がありましたが、 BeagleBone Black (以降BBB)シングルボードコンピューターを搭載していました。そのようなプロジェクトはまだなかったからです。 このようなロボットに関する情報は、特にソフトウェアコンポーネントに関しては簡単に見つけることができませんでした。 しばらくの間、どこから始めればよいのかは明確ではありませんでしたが、すぐにロボット構造の製造(シャーシと電子部品)から始め、その後何が起こったのかをプログラミングすることを決めました。
Robocraft.ruで、ロボットのオペレーティングシステムに関するいくつかの記事(ROS)を研究した結果、特にBBBには十分なパワーがあるはずだったため、制御を構築することが決定されました。 さらに、ROSは、開発のための多くのツールとターンキーソリューションを備えたロボット工学の非常に有望な分野です。
ハードウェアの選択
上記のように、BeagleBone Blackはシステムの頭脳になりました。
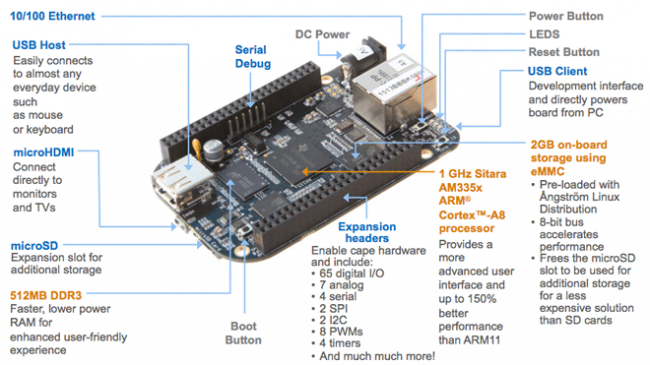
BBBはUbuntuもサポートしていますが、ARMアーキテクチャのコアを備えています。
ROS for ARMがまだ実行されている実験モードは、linux-armで安定して動作するツールが使用されていたため、作業プロセスにはまったく影響しませんでした。
次の重要な部分は、サーボコントローラーです。 BBBにはいくつかのPWMチャネルがありますが、18個のサーボには明らかに不十分です。 さらに、PWM制御はプロセッサに不必要に負荷をかけます。 何らかのインターフェイスを介して制御できる既製のサーボコントローラーを使用する方が論理的です。 適切なMini Maestro 18チャンネルUSBサーボコントローラーが選ばれました。

このコントローラーには、サーボ用に18のチャネルがあり、UARTおよびUSBインターフェイスがあります。 サーボドライブの目標角度の設定、速度、加速度を含む独自のプロトコルで制御され、さらにグラフィカルシェルに便利なキャリブレーションツールがあります。
ただし、MiniのマエストロをBBBにすばやく接続することはできません。UARTインターフェイスレベルは5 Vと3.3 Vが異なるためです。出力は追加のデバイス(3.3 Vを5 Vに、またはその逆に変換するロジックレベルコンバーター)を使用しました。 そのようなことはSparkfaun.comから来ました。 これはBOB-08745です。

BBBとコントローラーを簡単に接続して、UARTを介して通信できるようになりました。
将来の研究のために、ロボットが少なくとも何らかの形で宇宙で感じられるようにIMUが必要でした。 Pololuは、加速度計、磁力計、ジャイロスコープを備えたIMUも注文しています。
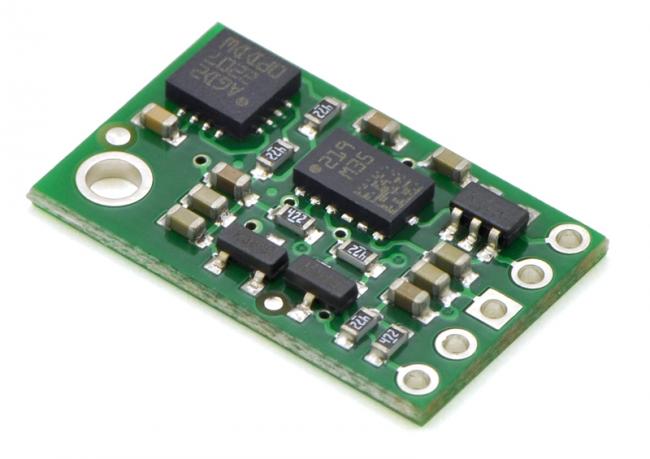
これは、I2Cインターフェイスを介して周辺機器と通信する2つのL3GD20およびLSM303DLHCチップを備えた小型のMinIMU-9 v2ボードです。 MiniIMUは2.5V〜5.5Vで動作するため、コンバータは不要でした。
多くのビデオでは、ヘキサポッドはさまざまなコンソールからゲームパッドによって制御されていました。 無駄ではありません。 多くのボタンと2つの「アナログ」ノブにより、ジョイスティックは便利な制御デバイスになります。 標準のジョイスティックのドライバーがROSで見つかりました。接続の問題を回避するために、オリジナルのPS3 Dual Shock 3を購入することにしました。

Bluetooth経由で接続するには、明らかにUSBアダプターが必要でした。 その結果、そのうちの1つが既存のドライバーを使用したくないため、2つがありました(これについては後で説明します)。 そして、MobileData UBT-206-獲得。
BBBをデスクトップコンピューターに接続するには、SSHプロトコルを使用します。SSHプロトコルは、たとえば、イーサネット、Ethernet-over-USB(USB経由でイーサネットネットワークをエミュレートできるテクノロジー)、またはWi-Fiを使用します。 毎回ワイヤを接続することはあまり便利ではなく、これを取り除くために追加のUSB Wi-Fiアダプタが追加されました。 どのアダプターがBBBに最適であるかを検討した結果、arm-linuxカーネルがrtl8192cuドライバーをサポートしていることが明らかになりました。これに基づいて、幅広いデバイスが動作します。 コンパクトなNetGear WNA1000Mが選択されました(図ではMobileData UBT-206を使用)。


多くの場合、外部アンテナ付きのアダプターを使用することをお勧めしますが、これは非常に安定して機能します。
まあ、USBホストBBBコネクタを1つだけ拡張するには、USBハブが必要です。 私はこれが好きでした-MobileData HDH-700、それは4つのデバイスのそれぞれのボタンスイッチを持っているからです:

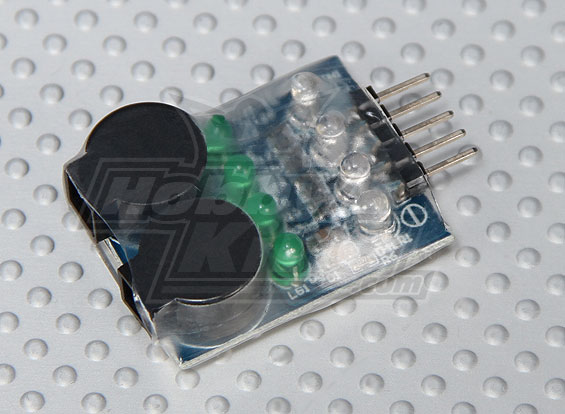
次のアイテムは、すべてのオンボードデバイスのバッテリーです。 バッテリー-Li-Po 2200mAh、2個の缶で構成。 それとともに、2つの電圧レギュレーターがバッテリー電圧を必要な5V(BBBおよびサーボコントローラー用)および6V(サーボドライブ用)に変換します。 また、バッテリーには低充電インジケータがあり、バッテリー電圧が最小まで低下すると貫通します。
設計とサーボの選択
さまざまな素材で作られたヘキサポッドのデザインはたくさんあります。 インターネットでは簡単に見つけられるので、ここでは写真をアップロードしません。 クラシックバージョンは、各脚に3つのドライブで構成されているため、十分な自由度があります。 もちろん、2つのドライブでうまくいくことができますが、動きはより「ぴくぴく」なります。
サスペンション部品のさまざまな材料と製造技術。 3Dプリンターでの印刷や、プラスチック、合板、金属のシートからのレーザー切断が可能です。 3Dプリンターが手元になく、印刷されたパーツの強度が低いため、アルミニウム、ジュラルミンなどの金属の設計が選択されました。 さらに、仕事中にCNCフライス盤を利用できるようになったため、フライス加工によって金属板の一部を作成することになりました。
イメージが独自のデザインで作成された主な例は、 Lynxmotion Phoenixです。

GrabCADを使用したモデルは、 作成にも非常に役立ちました。
ロボットの主要部分の1つはサーボです。 それらには十分なトルクが必要であり、信頼性のために、ギアボックスは金属から選択する必要があります。 有名な企業であるHitecとFutabaのこのようなサーボは、約20〜30ドルかかります。 そのため、「安くない」Hitec HS-645 / 485MGサーボの代わりに、 Turnigy TGY-S901Dの半額である中国語が注文されました 。

6Vで電力を供給されると、最大荷重12.5 kg / cmに対応できます。これは、推定重量2 kgのロボットに十分でした。 中国のサーバーには在庫が必要です。その品質には多くの要望があります。 それらのいくつかは、最初から無関係な音で動作します。 また、かなり大きなバックラッシュと湾曲した軸があります。 しかし、10ドルごとに-それは許容範囲です。
構造の強度と弾力性を高めるために、シャフト用のアルミニウム製ディスクマウントをサーバー用に購入しました。

SolidWorksおよび製造部品での3Dモデルの作成
したがって、コンポーネントの基本セットを決定し、SolidWorksを使用して3D図面を作成し始めました。 これは何が起こったかを示したものです(すべての歯車を描いたわけではありません):

それとは別に、おそらくいくつかの詳細とノードで停止する価値があります。 平らな部品に加えて、曲げによって得られた部品は特に複雑でした:

これらの部品の開発は、SolidWorksの特別なツールを使用して取得されました。 それらは、不要なデバイスの本体から取り除かれた2 mmのアルミニウムのシートから切り取られます。 曲げ加工が行われたため、アルミニウムブランドは明らかにこれに適していました。 すべての部品を均等かつ均等に曲げる問題は、特別なツール、万力、ハンマーの助けを借りて解決されました。 手作業による製造方法から予想していたよりもさらに良くなりました。
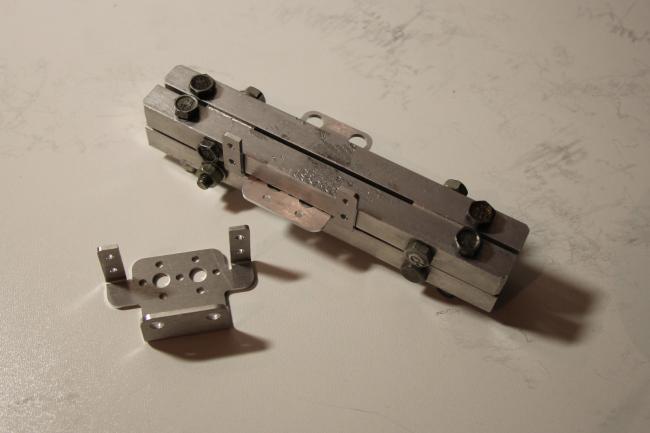
次の項目は、シャフトの反対側のサーボ側のブッシングです。 これらのブッシングを介して、サーボがフレームの下部に取り付けられています。
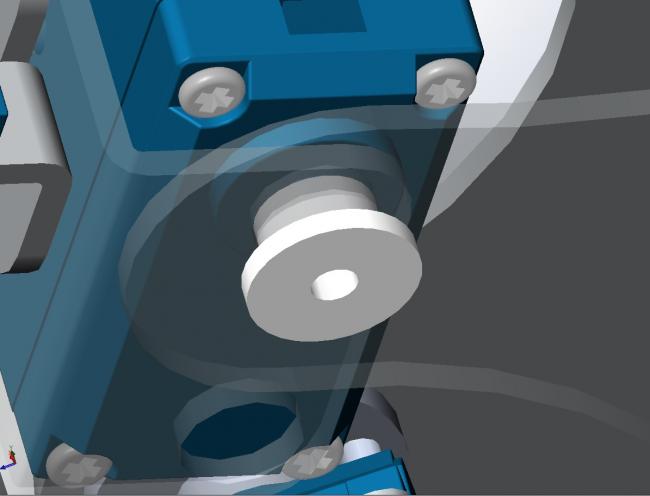
ブッシングは、フレームの2つのプレートに荷重を均等に分散するために必要です。そうしないと、サーボシャフトが曲がる可能性があります。 ブッシングは、すべて同じフライス盤で、摩擦防止部品に使用されるポリマーであるカプロロンから作られています。

そして最後に立ち止まるのは、足の端の詳細です。
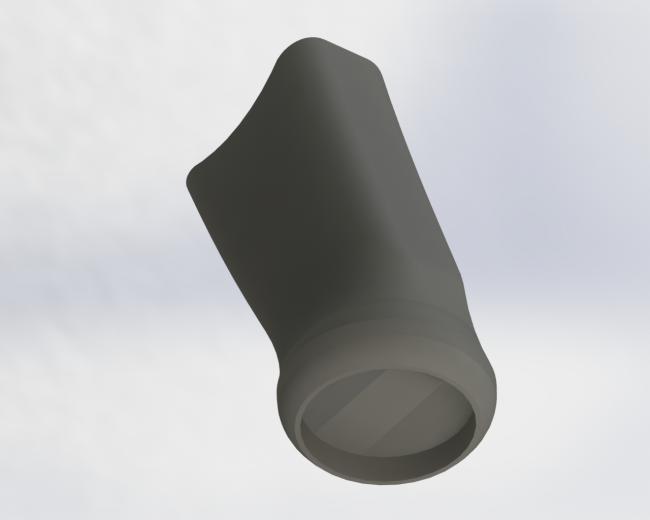
それらは、ABSプラスチック製の3Dプリンターで印刷されます。 さらに、楽器のハウジング用のゴム製の脚が丸い溝に接着されています。 結果は、表面との接触摩擦の増加に寄与する完全な部品です。 それらがないと、ロボットの慣性と脚の「強さ」の比が、歩行時の脚の滑りや、任意の平面でのその他の動作につながります。

残りの平らな部品は、厚さ2.2 mmのジュラルミン製です。

ロボット組立
アセンブリはいくつかの段階で行われました。 これは、個々の部分のデバッグによるものです。 最初は、サーボコントローラーを備えたシャーシのみが組み立てられ、制御はamd64デスクトップコンピューターからUSBを介して実行されました。 次に、BBBとハブ、そして最後になりましたが、スタビライザーとIMUを備えたバッテリーが登場しました。
写真-アセンブリのさまざまな段階と最終結果。



ビーグルの骨
完成したイメージの Ubuntu 13.04がBBBにインストールされます。 現在、このバージョンのディストリビューションはダウンロードできなくなりましたが、最新のLTSのみがあります。 カーネルバージョン3.8。
eMMCはmicroSDカードを介してフラッシュされました。 USBフラッシュドライブにイメージを書き込む最も簡単な方法は、Image Writer for Windowsを使用することです。 ファームウェアの説明はこちらにあります 。
UARTをBBBに初期化することについて。 これは、デバイスツリーコンパイラ(DTC)を介して行われます 。詳細については、 こちらを参照してください 。 この方法でBBBにインストールできます。
wget -c https://raw.github.com/RobertCNelson/tools/master/pkgs/dtc.sh
chmod +x dtc.sh
./dtc.sh
ここから撮影。
RxおよびTx UARTがピンP9_11およびP9_13に現れた後(uart5の場合)、データを転送できます。 また、ビットレートを変更するために、sttyユーティリティが使用されます。 サーボコントローラーでの作業を開始する前に、スクリプトを使用して起動します。
stty -F /dev/ttyO4 cs8 115200
コントローラーでは、速度はMaestro Control Centerを介して設定されます。
システムを起動するたびにUARTを「起動」するには、次の行を追加する必要があります
sudo bash -c "echo enable-uart5 > /sys/devices/bone_capemgr.*/slots"
rc.localで。
上記のように、IMUはI2Cインターフェイスを使用します。 BBB上のI2Cはデフォルトで機能し、起動するために追加の手順は必要ありません。 ただし、IMUのROSノードを作成する前に、Linux用のi2c-toolsユーティリティを使用して、インターフェイスが正しく接続されていることを確認することが役立ちました。 I2Cとの取引はまだビデオを助けた。
大きな問題は、Bluetoothを介してジョイスティックを適切に動作させることでした。 接続は難しくありませんでした。すべてがps3joyノードの説明とチュートリアルです。 カーネルバージョン3.5以降、ジョイスティックのドライバーのみが、デバイスから約5Hzの低周波数でイベントを受信し始めました。 これは通常の管理には十分ではありません。 問題はここに記載されています 。 したがって、他の多くのドライバーを試したところ、arm-linuxで動作するドライバーが見つかりました。 これはsixadドライバーです。 しかし、彼がBBBでお金を稼ぐには、彼は手動で組み立てられなければなりません。 これはRaspberry PIで行われ、 ここで詳細に説明されています 。 コンパイル時に、何らかの理由でエラーが発生しました:
error: ... was not declared in this scope
ヘッダーunistd.hを各ドライバーのソースファイルに追加することで解決しました。
ドライバーを組み立ててインストールした後、ゲームパッドはまだすぐに接続しませんでした。 これは、Bluetooth設定を変更することで決定されました。
echo "DisablePlugins = input" >> /etc/bluetooth/main.conf
その後、ドライバーをデーモンとして起動し、PS3ボタンを押してジョイスティックを自由に接続できます。
USB Wi-Fiはそのまま使用できます。 クライアントがルーターに接続するには、/ etc / network / interfacesのフィールドを変更する必要があります。
wpa-ssid ""
wpa-psk ""
ロス
まず、ROSはデスクトップコンピューターにインストールされました。 Ubuntu 13.04にシームレスにインストールされたHydro Desktop-Fullディストリビューションバージョン。 「大型」コンピューターでは、ROS視覚化ツールで記述されたノードと運動学モデルをデバッグすると便利です。 さらに、コンパイルはBBBよりもはるかに高速です。 そのため、すべてがコンピューターで開発され、その後BBBに転送されてそこでコンパイルされました。 残念ながら、ROSのクロスコンパイルは依然として難しい作業です。
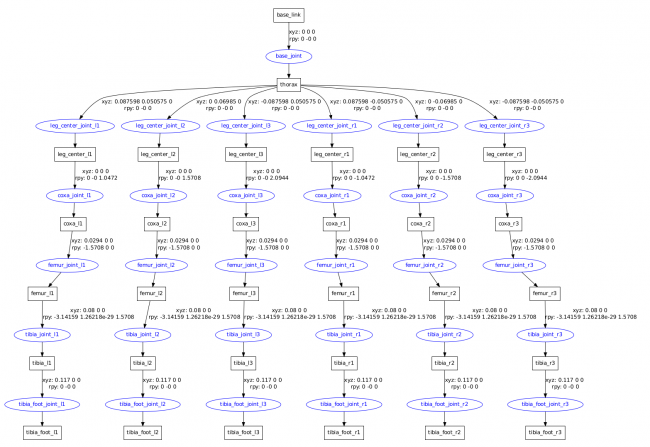
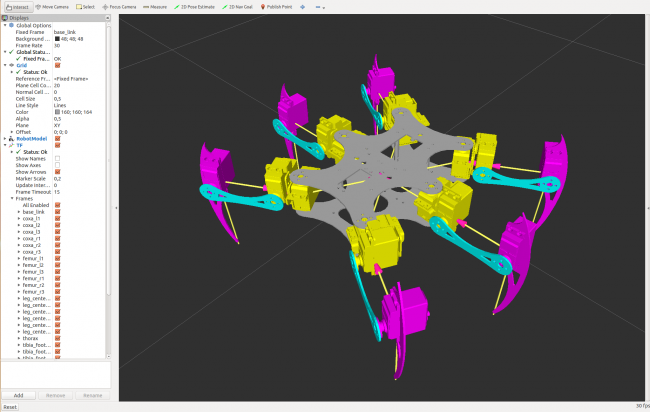
視覚化のための便利なツールrvizがあります。 結果のモデルと制御下での動作を表示するために使用されました。 これを行うために、 joint_state_publisher- 「joints」の位置を設定および変更するためのツールを含むパッケージとrobot_state_publisher - tfでロボットの位置を変換するパッケージがあります。 モデル自体はURDFファイルに含まれています。 すべてのセグメント(リンク)とそのジョイント(ジョイント)、およびそれらの相対位置を記述します。 明確にするために、部品の3DモデルはSTL形式で添付されています。 ただし、ロボットには繰り返し部分(脚)が含まれているため、 XACRO形式(XMLマクロ)を使用すると便利です。これは、URDFに変換されます。 XACROの主な利点:マクロ、数学演算、および定数の存在。 このようにして、ロボットモデルを記述するコードを最小限に抑えることができます。 図は、rvizのモデルの構造と視覚化を示しています。
C ++でコアノードを記述する場合、Eclipse Kepler IDEが使用されました。 Eclipseの構成については、 こちらをご覧ください 。 一般に、開始する前に、 textbook 、 roscpp 、およびcatkinに慣れる必要があります。
ソフトウェア開発
この記事では、ノードのコードについては説明せず、一般的な構造と目的のみを説明します。 コードの作成の詳細については、次の記事をご覧ください。
したがって、BBBのROSノードの構造の一般的な図(楕円形はノードの名前、長方形はトピックの名前):

joy_nodeは、標準のLinuxデバイス(/ dev / input / js)のデータを「 Joy 」メッセージに変換し、ROSトピックに変換できる既製のパッケージです。 チュートリアルパッケージを参照すると便利です。 ほとんど常に、質問に対する多くの回答が含まれています。
crab_teleop_joy-ジョイスティックからのデータを処理し、それをメッセージに変換してヘキサポッドを制御するノード。 たとえば、「アナログ」ハンドルの2つの軸に沿った位置からコースアングルが計算され、その中心からの距離がストライドの長さに影響します。 これらの値は、歩行ジェネレーターで使用されます。 ボタンを押す特定の組み合わせとシーケンスを使用するロジックも構築されています。 受信したメッセージは、3つのトピックでさらに送信されます。
crab_leg_kinematics-サービスノード。 その目的は、逆運動学の問題を解決することです。つまり、エンドエフェクタの座標(私の場合、これらは脚の先端)に基づいて、関節の角度(サーボの角度)を計算します。 サービスリクエストは、脚の先端のターゲット位置の6つのベクトルの形式で形成され、答えは18のサーボアングルの形式で提供されます。 サイトは、ROSに統合されているキネマティクスおよびダイナミックライブラリ( KDL )を使用して作成されました。 ノードのクライアントはcrab_body_kinematicsとcrab_gaitです。
crab_body_kinematics-ロボットURDFのモデルとメッセージのデータに基づいて、脚の端の位置のベクトルを計算します。メッセージのデータには、初期位置からのフレームの望ましい線形および角度の偏差と脚の半径が含まれます。 また、開始位置からの持ち上げコマンド(ロボットがフレーム上にあり、脚が折り畳まれている場合)および開始位置に戻るコマンドが実装されています。
crab_gait -2種類の歩行を実装するために、足の端の位置ベクトルを生成するノード。 入力には、歩行のタイプと状態(歩き/立ち)と制御値に関するコマンドを含むメッセージがあります:方位角とヨー角、ステップサイズ。 歩行タイプは三脚とさざ波です:
三脚のような歩行は速くなりますが、中央脚の負荷は前脚と後脚よりも大きく、これがサーブの寿命に影響します。
管理は、2つの「アナログ」ジョイスティックハンドルを使用して実行されます。左-一定のヨーでのコース変更(「クラブ」で移動)、右-ヨーの変更でのコース変更(前後に移動)。
crab_imu -MinIMU-9ドライバー。Arduino スケッチの一部から組み立てられます。 MEMSセンサーからのデータに基づいてオイラー角を計算するアルゴリズムが含まれています。 また、ピッチとロールの偏差を補正するエフェクトを生成するシンプルなPコントローラーも含まれています。 これらのアクションはトピックmove_bodyを介してcrab_body_kinematicsに渡され、足の望ましい位置を設定します。
crab_maestro_controllerは、Mini Maestroの最後のドライバーノードです。 入力には、サーボの18の角度位置があり、UARTを介してサーボコントローラーの通信プロトコルに変換します。
視覚化のブロック図は、ロボットシステムのスキームとわずかに異なります。 視覚化では、crab_maestro_controllerノードを除くすべての同じノードが、crab_joint_publisher、joint_state_publisher、robot_state_publisher、およびtfノードに置き換えられます。

後者については上記で説明しました。
crab_joint_publisher-コントローラー向けのメッセージを「 JointState 」 メッセージに変換し、joint_state_publisherの入力に送ります。
ビデオを使用した開発のいくつかの段階について説明します。
最初は、すべてのヘキサポッドはコンピューターから制御されていました。 最初は、脚の1つの円を描くことによる逆運動学のテストでした。
次に、ボディの位置と方向を制御するための部品が組み立てられます。
そして、実際のロボットでのこの実施形態:
その後、これをすべてBBBで起動し、IMUノードをテストしました。
その後、ロボットはジョイスティックで制御されたリップル歩行を行いました。
そして、今日のヘキサポッド機能の終わりに:
おわりに
ヘキサポッドの作成は非常に興味深いプロセスでした。ROS機能とBeagleBone Blackのパフォーマンスにより、ロボットのソフトウェアコンポーネントを追加および改善できます。 この記事では、ROSを使用した便利な開発のすべての可能性を最初に示し、また、詳細を説明することなく、ロボットの作成に使用されたツールに注意を払いたいと考えました。 最初の段階では、どこから始めて何を使用するかを把握するのが最も困難でした。 この記事が、あなたが開発の道を歩むのに役立つことを願っています。
githubの PSプロジェクトソース