ラズベリーHD FPVフォーム

同僚による記事、HD FPVのIron Proofを詳細にレビューした後、Raspberry Pi + Pi Cameraに基づいた偉業を繰り返すことが決定されました。
はじめに
アナログFPVについてのGol Habrauserの主なアイデアで、私は完全に同意します! デジタル時代では、ガスマスク(IMHO)で花の香りを吸い込むようなPAL信号をお楽しみください。 ラズベリーキットを装備して、高解像度ビデオの
ラズベリーパイ
 | パイカメラ
 |
Wi-Fiブリッジには、実績のあるユビキティブレットm2 hpが使用されました 。

このWi-Fiモジュールは、モバイルプラットフォームに最適です。 オンボードバッテリーからPOEで簡単に給電でき、2ペア(7-24V、青ペア+ 、茶色ペア- )に電力を供給すれば十分です。サイズが小さく、電力と工業デザインが優れています。 また、同様のフォームファクターの 5.8 GHz モデルも素晴らしいボーナスです。これにより、プラットフォーム設計を変更せずに、Wi-Fiモジュールとアンテナを交換するだけで、異なる周波数範囲に切り替えることができます。
テスト

このデバイスの利点は、必要な機器の設置の容易さ、操縦の簡単さ、運搬能力、および膨大な保守性です。 最後の機能は、after落後に何度も助けられ、すべてがエポキシ接着剤で組み立てられ、
フォームペイロード
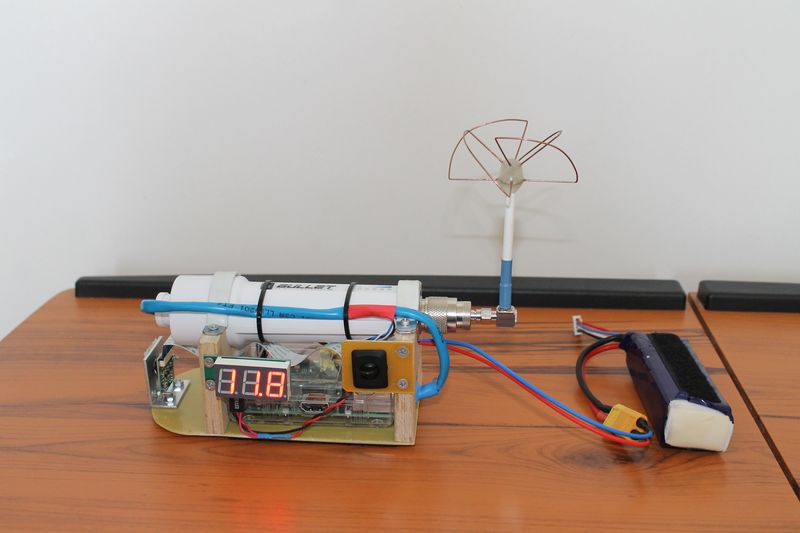
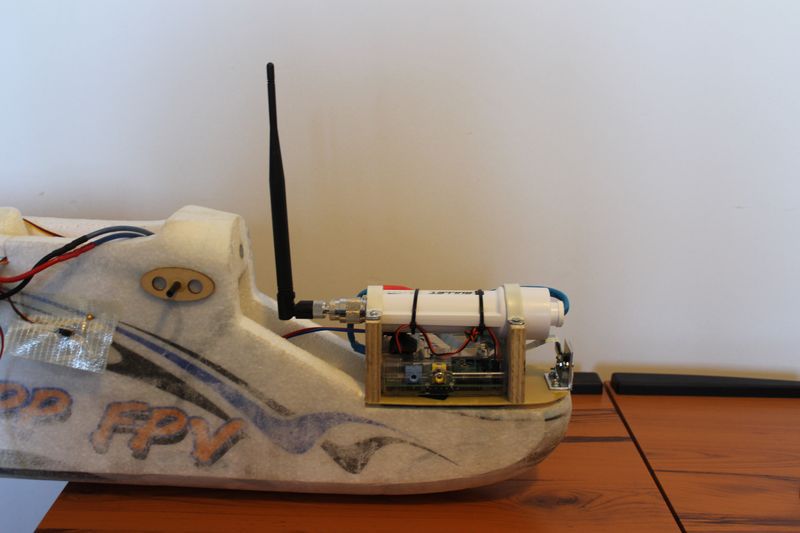
- カメラ
- ラズベリーラズビアン
- アンテナ付きWi-Fiモジュール
- 電圧インジケータ
- メイントグルスイッチ
- ラズベリー電源
- バッテリーコネクター
アンテナとして、アナログFPVの自家製2.4 GHzクローバーと通常のWi-Fiピンを使用しました。
地球




- Sun Visorを使用したUbuntu 12.04 LTSラップトップ
- アテナD-Link ANT24-0801
- Wifiモジュール
- バッテリー電源モジュール
アンテナは、垂直70度、水平70度の広い放射パターンの計算から選択されました。
ソフト
ブロードキャストはGstreamerを使用して行われました 。
最初の重要なポイント。 同僚がソフトウェアの設定を行ってくれたので、彼は感謝しています。 ラズベリーでの放送を開始し、ラップトップへのビデオストリームを受信するために使用するスクリプトを提供します。
ボード
raspivid -n -w 1280 -h 720 -b 4500000 -fps 30 -vf -hf -t 0 -o - | \
gst-launch-1.0 -v fdsrc ! h264parse ! rtph264pay config-interval=10 pt=96 ! \
udpsink host=192.168.4.204 port=9000
地球
gst-launch-1.0 -v udpsrc port=9000 caps='application/x-rtp, media=(string)video, clock-rate=(int)90000, encoding-name=(string)H264' ! rtph264depay ! avdec_h264 ! videoconvert ! autovideosink sync=false
行こう...
2番目の重要なポイント。 私はパイロットではありません。 経験豊富なパイロットがフォームを運転しました。彼に感謝します。 私たちは長い間、さまざまなデバイスでうまく飛行しています。 この段階で、私はスターターブースターユニットとして行動しました。




...到着しました
フライトでは正確に3回発生したため、 結局、非常に大きなバッテリーを詰め込んで飛行機をリロードし、非常に長い間飛行することを望んでいました。 このため、動きの遅い装置は非常に不器用になりました。 接近すると、横方向の突風に打ち勝つことができず、デバイスは翼に落ち、鼻を地面に突っ込みました。 大きくて重いバッテリーが壊れ、まだ逃げることを決め、発泡プラスチック製の胴体をわずかに拡張しました(メンテナンス性について書いた、エポキシはすでに乾燥しており、


それがすべてでした!

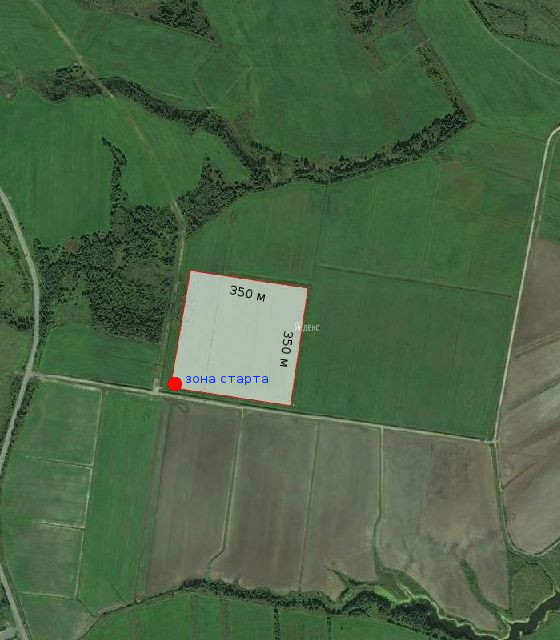
HD FPVは...遠くない。 本当にフィールドの非常に小さな領域で遅れなくビデオを取得することができました。
放射パターン(水平ドーナツ)に応じたホイップアンテナは...ホイップアンテナのように動作します。 高さと強い曲がり/回転で、花弁が受信アンテナに落ちない場合、遅れが始まります。
ホイップアンテナからのビデオは、モニター画面から15 fpsで書きました...何が起こっているかの写真を提供します。
将来、受信したストリームの直接記録が設定されます。
「クローバー」アンテナは球状の放射パターンを持っていますが、チャネルの範囲はそれほど広くないため、「長い」スパンの間、画像のすくいも出てきました。 残念ながらビデオはありません。
衝突後、異なるアンテナを使用して徒歩でフィールドを2回トリップしましたが、結果はわずかに予測可能です:範囲は望みをはるかに超え、ホイップアンテナはローブ(ドーナツ)の平面が受信アンテナに落ちた場合、「クローバー」は好きなようにくるくる回るが、 300メートルまでの「ピン」の範囲よりもさらに狭い範囲で、全方向にブロードキャストします。
結論
フライングHD FPVは現実です! 動作します!
それ以外の場合、結論はGolの場合と同じです。 弱点はWi-Fi、またはむしろオンボードアンテナです。地上で狭い指向性アンテナを備えた回転式UAV追跡ステーションを展開できる場合、ボードで何か他のものを発明する必要があります。 Wi-Fiチャネルの動作を最適化するには、使用するモジュールに多くの設定があります。そこで詳細に掘り下げる必要があります。 ボードからのフローを最適化(最小化)します。 また、オンボードアンテナを使用したソリューションを考えるのは自然なことです。
PS EarthモジュールのWi-Fi設定で、設定された28dBmではなく10dBmの低信号電力が設定されていることがわかりました。
近い将来の計画
- Ardupilot 2.0の非常にインテリジェントな頭脳(少し後のモデルへのリンク)を搭載します。これは長時間このボードにも搭載されているためです。これにより、
パイロットが緊張して飛び去ることがなくなります Brains on Commandは自動操縦を発射場所に戻し、重要なことに、ターン中でもグライダーを水平面で安定させます。これにより、ホイップアンテナのより効率的なテストが可能になります。 - 2.4 GHzの天井アンテナを設置し(すでに中国からの途中)、テストします。 彼女は我々が見ると言うように、下向きの半球放射パターンを持っています。
- 5.8 GHzでモジュールをテストします。
- 地上のファイルへのストリームの記録を整理すること、そうでなければ人間には不可能です。
- PSそして、フルパワーで
脳バーナーエミッタをオンにします!
3番目の重要なポイントと、カメラの精神的なサポートと巧みな使用に対する妻に感謝します。それなしでは、プロセス全体の優れた写真は得られませんでした。
次の部分