
そして、ジャイロスコープがハンドルに取り付けられただけではありません! 2つ目は足に、3つ目はゴム製のリングで灰皿の蓋に引っ張られました。 これらすべてのトリック-ステアリングホイールが「遅れ」ず、アクセルペダルが「ダム」であるかどうかを確認するため。
ステアリングホイールは車輪に、アクセルペダルはスロットルに機械的に接続されていますが、車はドライバーのコマンドにすぐに反応しません。 特に、ギアボックスが自動で、電子機器が「愚か」である場合。 遅延は制御を著しく複雑にし、望ましくない変動につながる可能性があります。 そのため、ドライバーのコマンドに対する車の反応率を知ることが重要です。
遅延を見つける最初の方法は、OBD(On-Board Diagnostics)ポートからのデータを使用することです。 このポートは車両診断バス(CANバス)に接続されています。 エンジンおよび送信エラーコードを読み取るためにサービスで使用されるのは彼女です。 また、現在のエンジン速度、燃料消費量、アクセルペダル角度、スロットル開度などに関する情報も含まれています。
車のバスに接続するために、私は典型的な中国の「obd reader」を1000ルーブルで購入しました。
このデバイスは、現代の車に接続できます。 ただし、安価なリーダーは、車のデバイスよりも多くの情報を提供しません。 つまり 私たちの目的にとっては役に立たない。 一般的に、診断ポートとバスにはいくつかの問題があります。
- クローズドプロトコルとバスデータ標準
- 未知の精度/データエラー
- 予測不可能な遅延
- 私はこれについて何も理解していません
- そのため、即興のジャイロスコープとアルデュインから独自の測定器を組み立てることが決定されました。
測定技術
最初のジャイロスコープは、マスキングテープでステアリングホイールに「しっかりと」固定されていました。 彼はハンドルの回転角度を決定しました。 2番目のジャイロスコープは、輪ゴムで運転者の足に引っ張られます。 彼はブレーキ/アクセルペダルを押すことを伝えました。 最後のデバイスはキャビンに固定されました。 ジャイロスコープに加えて、彼は加速度計を持ち、他のセンサーからデータを収集しました。 その後、データはusb経由で仮想COMポート経由でラップトップに送信されました。


キャプテンが示唆するように、遅延を測定するには、すべてのセンサーの時刻を同期する必要があります。 現在、同期は「緩い」リリースされています。受信センサーは、信号が到着する時間(ワイヤレスモジュールからの割り込みによって決定される)-データの送受信にかかる時間からマジック定数を減算します。

この魔法の定数を決定するために、彼はセンサーを互いに押し付けて回転させました。 測定値間の遅延は、まさに「魔法の定数」を与えます。
センサーについて
arduino unoに基づく2つのモジュールが組み立てられました。
- arduinoの上部に取り付けられた、プロトタイピング用の追加回路(シールド)。
- シールドにはんだ付けされたMPU-6050ベースのジャイロスコープ。
- 無線モジュールnrf24l01 +、シールドにはんだ付け。
arduino microに基づく1つのモデル:
- レーザーアイロン技術用の両面ボード。
- ロジックレベルマッチングボード5v <—> 3.3v。
- I2Cインターフェイスを介したMPU-6050に基づくジャイロスコープ。
- ラジオnrf24l01 +。
測定
車がないので、友人のコンスタンティンを三菱ランサーでテストしました。

すべてのテストは公道の行き止まりで行われたため、速度は高くありません。
Kostyaは約30 km / hの速度で運転し、ステアリングホイールを積極的に回し、アクセルペダルを調整しました。 近くの訓練車は、使用済みのランサーの私たちの不適切な行動を見守っていました。
このとき、私は助手席にラップトップを置いて座っていて、センサーからのデータの受信を制御していました。
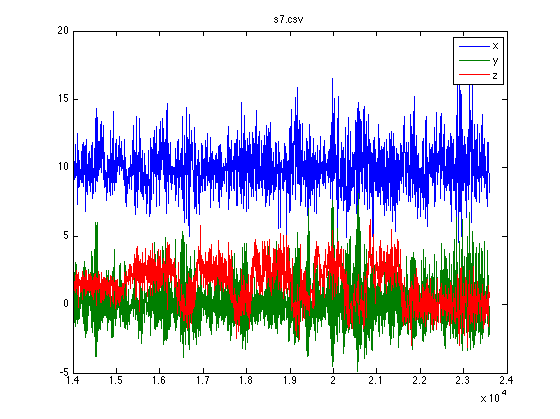
次のグラフは、脚に引っ張られたジャイロスコープの典型的な測定値を示しています。
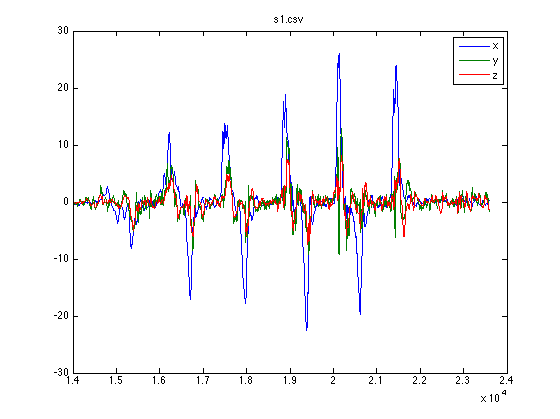
エンジン、ドライバーの手、道路からの振動-すべてが騒音につながります。 それらは、特に車体の加速度チャートで顕著です。
高周波ノイズに対処するために、データはローパスフィルター(フィルターフィルターフィルター関数)によって前処理されました。 フィルターは、信号に遅延が追加されないように選択されました。
ジャイロスコープがアクセルペダルとステアリングホイールの回転速度を決定することに注意してください。角度が必要です。 このために、ハンドルと足のセンサーからの測定値が統合されました。 次に、相互相関(matlabのfindlay関数)を使用して遅延を計算しました。
以下のグラフは、ペダル(足)の回転角度、対応する軸に沿った車の加速度、および計算された遅延に対して調整された車の加速度を示しています。

Kostyaはアクセルペダルを押して放し、車は124ミリ秒後にのみ応答しました。 速度-毎時約30 km、回転数-3000 rpm。
30 km / hの速度で、個々のテストの結果によるステアリングホイールのステアリングの遅延は、90〜95 msの範囲でした。

計画
- 他の車の遅延を測定します。
- アクセルペダルを押す(またはクラッチを離す)時点から100km / h(または402m)までの時間を測定します。
- ベンド(フィードバック)でハンドルの反力を測定します。
- コースの前/最中/後にドライバーの心拍数を測定します。