現在、ジャイロセンサーにはさまざまな種類があり、それらを正しく使用することで、航空機に必要な動作品質が保証されます。
ジャイロセンサーの種類ごとに、最適なアプリケーションニッチを見つけることができます。 ジャイロセンサーを選択する際には、精度、信頼性、消費電力、全体の寸法、コストなどの主要な特性が考慮されます。 制御システムとナビゲーションシステムの要件に応じて、適切なタイプのジャイロセンサーが選択されます。
それにもかかわらず、さまざまなセンサー全体から、上記の特性に関して最も有望なものを区別することができます。 これらは、レーザージャイロスコープ(LG)、光ファイバー(FOG)、ウェーブソリッドステート(VTG)、およびマイクロメカニカルジャイロスコープ(MMG)です。
その主な利点は、高速回転ローターとカルダンサスペンションの欠如による信頼性の向上、サービスマイクロエレクトロニクスに基づく主要機能ユニットの実装によるエネルギー消費の最小化、およびマイクロプロセッサーでのプライマリセンサー信号の数学的処理による精度特性の向上能力です。
ジャイロセンサーは、航空機の飛行および航法システムの構築における主要な情報源です。
曲技飛行システムでは、主に自動制御システムのフィードバック回路の角速度センサーとして使用されます。 ナビゲーションシステム-航空機の角度位置のセンサー、またはジャイロ安定化プラットフォームのゼロ位置のインジケーターとして。 加速度計は線形加速度センサーとして使用されます。
ジャイロセンサーに基づいて慣性航法システムを構築するためのいくつかのスキームを考えてみましょう。 ナビゲーションシステムの主なタスクは、地理座標で航空機の位置を決定することです-経度(λ)および緯度(φ)の位置、飛行の速度(υ)および高度(h)、慣性空間の重心に対する角度位置-方位(ψ) 、ピッチ(ϑ)、ロール(γ)。 図1.1および図1.2は、航空で採用されたこれらのパラメーターを示しています。

図 1.1航空機の方位角
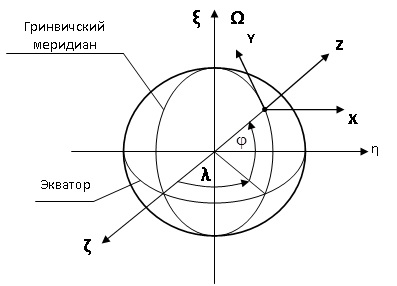
図1.2航空機の位置が決定される座標系
図1.1、1.2では:
 -地理的座標系、軸ξ-地球の回転軸と一致し、北に向けられています。 軸ς-赤道面にあり、グリニッジ子午線を通過します。 軸η-また、赤道の平面にあり、東に向けられます。
-地理的座標系、軸ξ-地球の回転軸と一致し、北に向けられています。 軸ς-赤道面にあり、グリニッジ子午線を通過します。 軸η-また、赤道の平面にあり、東に向けられます。  -X軸が東を向く、航空機の角度位置が決定される基準となる基本的な三面体。 Y軸-子午線に沿って北に向かう。 Z軸-垂直地形。
-X軸が東を向く、航空機の角度位置が決定される基準となる基本的な三面体。 Y軸-子午線に沿って北に向かう。 Z軸-垂直地形。  -慣性航法システムの測定三面体の軸。
-慣性航法システムの測定三面体の軸。
慣性航法システムは、プラットフォームとストラップダウンという2つの大きなグループに分けられます。
ナビゲーションシステムの種類に関係なく、航空機の飛行速度と移動距離に関する情報は、出力信号を積分することで加速度計の読み取り値から求められます-線形加速度
 。 ただし、この情報の信頼性は、慣性空間で指定された基本測定軸(三面体に伴う慣性の軸)に対する加速度計の感度軸の位置を決定する精度に依存します。
。 ただし、この情報の信頼性は、慣性空間で指定された基本測定軸(三面体に伴う慣性の軸)に対する加速度計の感度軸の位置を決定する精度に依存します。
プラットフォームナビゲーションシステムでは、加速度計が取り付けられているプラットフォームの慣性空間内の位置を安定させることにより、三面体に付随するベースの軸の指定位置が実現されます。 必要な安定性は、3つのジンバルフレームの自動制御システムによって保証されます。通常、高速回転するローターを備えた機械的な2段または3段のジャイロスコープが制御システムセンサーとして使用され、対応するジンバルフレームのトルクセンサー(DM)がアクチュエーターとして使用されます。
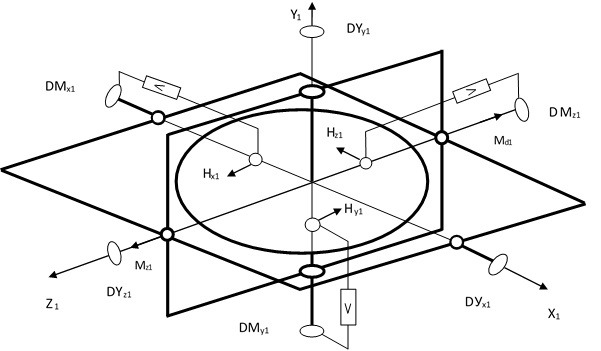
図1.3プラットフォームナビゲーションシステムの構築スキーム
ジャイロスコープは、加速度計と同じプラットフォームにインストールされます(図1.3)。 ジャイロスコープの精度が高いほど、プラットフォームの安定化が実行されるエラーが少なくなり、航空機の速度と位置がより正確に決定されます。
航空機の重心の角度位置に関する情報は、3つの角度センサーから取得されます
 ジンバルフレームの軸に取り付けられています。
ジンバルフレームの軸に取り付けられています。
例として、ナビゲーションシステムの測定軸の1つに沿ったプラットフォームの位置の安定化を検討します-軸に沿って
 (図1.3)。 邪魔な瞬間の影響でプラットフォームが回転するとき
(図1.3)。 邪魔な瞬間の影響でプラットフォームが回転するとき  軸周り ジャイロ軸
軸周り ジャイロ軸  軸の周りを歳差運動(回転)し始めます
軸の周りを歳差運動(回転)し始めます  角度εで。 ジャイロスコープの角度センサーに不一致電圧Uεが現れ、増幅後にトルクモーターに印加されます
角度εで。 ジャイロスコープの角度センサーに不一致電圧Uεが現れ、増幅後にトルクモーターに印加されます  ピッチフレーム。 後者は瞬間を作成します
ピッチフレーム。 後者は瞬間を作成します  その下で、フレームは元の位置に戻ります。 この場合、ジャイロローターはUεがゼロに等しくなるまで反対方向に歳差運動を始めます。 ピッチ軸を中心とした航空機の回転角に関する情報は、角度センサーから受信されます
その下で、フレームは元の位置に戻ります。 この場合、ジャイロローターはUεがゼロに等しくなるまで反対方向に歳差運動を始めます。 ピッチ軸を中心とした航空機の回転角に関する情報は、角度センサーから受信されます  フレームの軸に取り付けられています。 同様の方法で、ジンバルの他の2つの軸に沿って、方位角とロールの制御と決定が実行されます。
フレームの軸に取り付けられています。 同様の方法で、ジンバルの他の2つの軸に沿って、方位角とロールの制御と決定が実行されます。
提示されたスキームから、プラットフォーム慣性システムの主な欠点が明らかになります-多数の機械的回転要素、アナログ制御システムの存在、その結果、システムの低い信頼性。
LG、VOG、VTG、MMGという新しい物理的原理に基づいたジャイロセンサーの出現と開発により、急速に回転する機械的ローターは存在せず、信頼性を高めた慣性航法システム-ストラップダウン慣性航法システム(SINS)の作成に進むことができました。
BINSにはカルダンサスペンションはなく、安定化プラットフォームの役割は、基本的な付随する三面体によって実行されます。
(図1.2)、これに関連してSINSの測定軸の位置が決定されます 航空機の飛行中。
3つの単軸ジャイロスコープと3つの加速度計がSINSのジャイロセンサーとして使用され、3つの直交する測定軸に沿ってSINS感度素子ブロックにしっかりと取り付けられています(図1.4)。 同様に、敏感な要素のブロックは、航空機のボディにしっかりと接続されています。
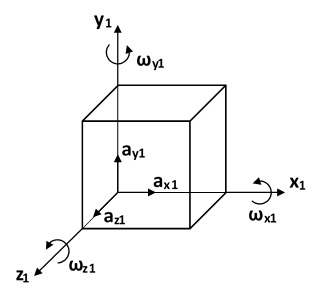
図1.4敏感な要素のSINSブロックの測定軸
ジャイロスコープを使用して、三面体に付随するベースに対する敏感な要素のブロックの測定軸の角度位置、つまり、航空機のロール、ピッチ、およびコースの角度を決定します。 SINSで使用されるジャイロスコープは、原則として角速度センサーのモードで機能するため、示された角度を決定するために読み取り値が統合されます
 。 プラットフォームシステムの場合のように、加速度計の読み取り値を使用して、航空機の速度と航空機が移動した経路を判断します。 この目的のために、加速度計の測定値も統合されています
。 プラットフォームシステムの場合のように、加速度計の読み取り値を使用して、航空機の速度と航空機が移動した経路を判断します。 この目的のために、加速度計の測定値も統合されています  。
。
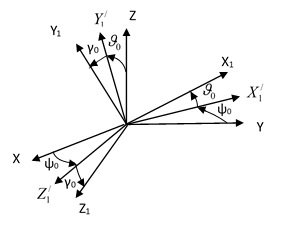
図1.5 SINS展示会の開始角度
フライトの前に、SINS展示が行われます。つまり、初期角度位置の決定です。
 測定軸( )三面体に付随するベースの軸に対して( )(図1.5)。 これらの角度の大きさはオンボードコンピューターに記録され、飛行中の航空機の角度位置を決定する際に考慮されます。
測定軸( )三面体に付随するベースの軸に対して( )(図1.5)。 これらの角度の大きさはオンボードコンピューターに記録され、飛行中の航空機の角度位置を決定する際に考慮されます。
機械的な回転部分がまったくないため、SINSは非常に信頼性の高い動作中のシステムになります。高速オンボードコンピューターを使用すると、周囲温度と機械的ストレスの変動によるジャイロセンサーのエラーをアルゴリズムで補正するため、このようなシステムの精度を向上させることができます。
しかし、ナビゲーションシステムの種類に関係なく、その技術的能力は主にジャイロセンサーの技術的特性によって決まります。
この投稿では、Ph.Dの本に掲載されている資料のごく一部。 ガルキナV.I. 「パースペクティブ航空機ジャイロスコープ」ISNB 978-3-659-47948-9
将来、この本からさらに情報を提供します。 しかし、興味があり、記事が役に立つと思う人のために、私はあなたに本を買うことに興味を示すようお願いします。