
別の惑星に自走車を着陸させることは、降下のいくつかの段階、パラシュート、エアクッション、ロケットエンジンの使用を必要とする非常に難しい作業です。 したがって、NASAは、太陽系を研究するためのプログラムを大幅に拡大するために、よりシンプルで信頼性の高いロボットを作成することに非常に興味を持っています。
NASAの研究センターで、エイムズ研究センターは、1つの大きな車輪のように動き、形を変えることができる可動外骨格の中央に電子機器を配置するというアイデアを思いつきました。 そこで、 スーパーボールボットロボットの設計が登場しました。

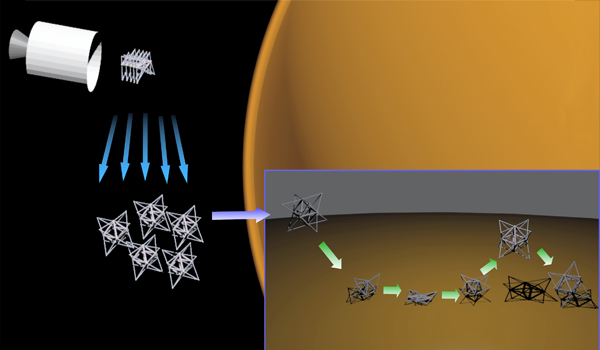
数キログラムの重さのこのようなロボットは、数十から数百個も惑星に投棄できます。 たとえば、密集した大気と低重力のタイタンでは、100 kmの高さから落下しただけでも、着陸後も簡単に生き残ります。 その後、彼らは自分自身を分解し、地形を研究するために異なる方向に展開します。 ただし、火星では、パラシュートを使用する必要があります。
ロボットの動きは、6つのサーボモーターの助けを借りて行われます。サーボモーターは互いに同期しており、構造全体が前方に「転がる」ように手足を動かす必要がある方向を計算します。
このスキームには多くの利点があります。 これらは言及された安価さと軽量であるだけでなく、通常のタイプの1つまたは2つのローバー(車輪)で行うことのできない大きな周辺エリアを探索する機会でもあります。 さらに、スーパーボールボットは、全地形型車両であってもクロスカントリー能力を認めず、石や荒れた地形を乗り越え、丘を登り、穏やかに滑り降りることができます。