
打上げ機の建設と運用は、宇宙飛行士の一種の「黒人チーム」です。 大規模で複雑な作業は静かに行われ、ほとんどの栄誉はペイロード開発者に委ねられます。 ロケットの設計と製造で解決されるタスクの複雑さを忘れていました。 この記事は、トピックの重要性を示し、「どのように飛ぶか」を知りたい人に小さな教育プログラムを紹介することを目的としています。
はじめに
小さな会社でも独自の衛星を作ることができますが、軌道にペイロードを届けるロケットを組み立てることができたのは11か国だけでした。 そして、例えば、韓国はロシアから最初の一歩を買い、それを「ブラックボックス」として受け取りました。 なぜそんなに少ないのですか? 事実、打ち上げ機の技術には非常に高いレベルの科学技術の開発と多額の資金が必要です。 あなたはおそらくこのビデオから始めるべきです:
V-2の最初の打ち上げからカウントダウンが始まった70年間、ミサイルは落下しようとしています。 もちろん、今では彼らがこれを行うのがより難しくなり、事故の数は数十パーセントではなくパーセントで測定されますが、業界の複雑さはそれに伴います。
エンジン
単純な人気のある科学回路でも、ブースターエンジンはかなり複雑に見えます。 実際のスキームについて私たちは何を言うことができますか?

この複雑さはどこから来たのですか? 事実、あらゆる種類のcなターボポンプ、再生冷却、クローズドサイクルなどが、エンジンの効率を高めるために使用されています。 最も単純な液体推進剤ロケットエンジンは、実際にはガレージ条件( 1成分のMosGIRDまたは3Dプリンターを使用 )で作成できますが、そのようなエンジンは趣味から離れることはありません。
ターボポンプユニット
ターボポンプユニットの主なタスクは、燃料と酸化剤を供給することです。 燃料エネルギーの一部をそれに費やして、ガス発生器の小さな燃焼室で燃やす必要があります。
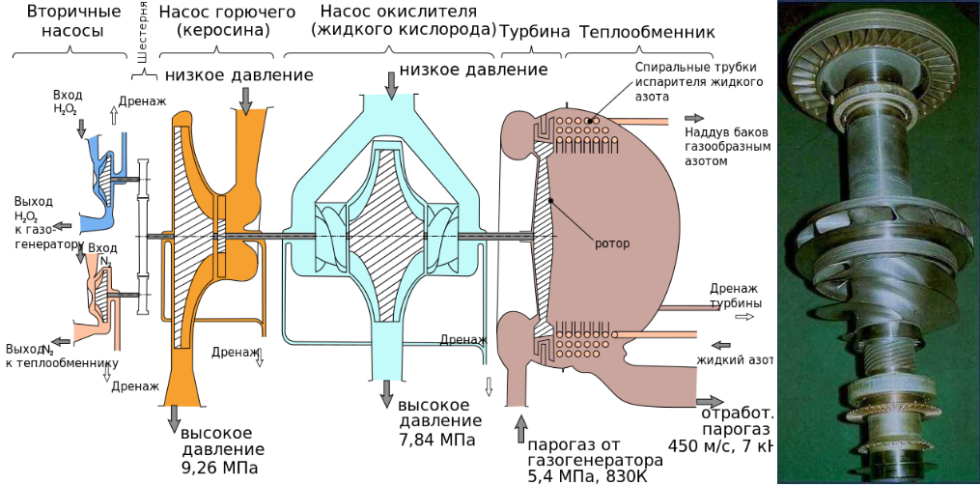
左側がR-7ファミリのTNA図RD-107 / 108、右側がRD-180(Atlas-V)のTNA図です。
ターボポンプユニットは非常に過酷な条件で動作します。 たとえば、TNAの爆発的な破壊は、ソビエトの「月」ミサイルN-1の2つの事故につながりました。
燃焼室
燃焼室には、燃料と酸化剤が噴射されるノズルがあります。 エンジニアが遭遇した主な問題の1つは、燃焼の不安定性です。 ノズルを通る流れの偶発的な変化は、圧力ジャンプを引き起こし、均一な燃焼の代わりにコンポーネントの爆発を引き起こし、エンジンの破壊まで問題を引き起こします。 唯一の有効な解決策は、燃焼室を拡張ノズルまたはパーティションによって互いに分離されたコンパートメントに分割することでした:

左側がRD-107 / 108、中央がRD-180、右側がF-1(土星Vの最初のステージ)
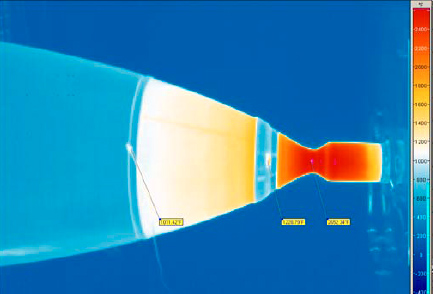
ノズル
そして、ここでの主な問題は熱の除去です。 燃焼室の温度は摂氏2000度に達し、熱流束密度は1〜20 MW / m ^ 2に達することがあります。これは、赤道付近のm ^ 2あたりの太陽からの年間エネルギーに匹敵します。
最も効果的な解決策は、いわゆるです。 再生冷却。 燃料成分(通常は燃料)は、ノズルの外側から冷却ジャケットに注入されます。 これを行うために、米国ではチューブシステムが考案され、ソ連では-コルゲートスペーサーとフライドリブ:
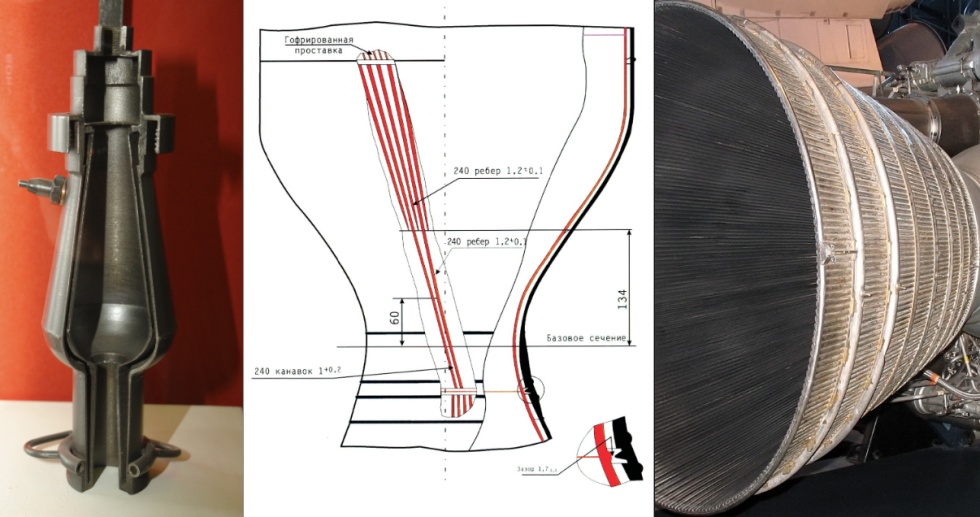
左側-RD-10、1933、最初の実験、中央-RD-107 / 108のrib骨の図、右側-LR-87、「タイタン2」
さらに、ノズルは、燃料を放出する壁の近くに配置され、炎のカーテンを作成します。 このようなカーテンは多数ある場合があります(たとえば、V-2エンジンには4つのカーテンカーテンベルトがありました)。 エンジンダイアグラムのカーテンの例を次に示します-RD-170の3つのカーテンベルト:

有効性
不可欠なパラメータとしてエンジン効率について話すことは事実上不可能です。 エンジンとエンジンのステージは多くのパラメーターの複雑な妥協であるため、作成/改良/生産の技術的複雑さ、作成/改良/生産のコスト、推力、特定のインパルス、燃焼室内の圧力、運転中に開発された信頼性などその他。 そして、これらのパラメーターは互いに矛盾しています。 製造が容易で安価な無負荷のエンジンは、推力または比インパルスが平凡であり、比インパルスが非常に高いエンジンは、困難、信頼性が低い、または高価すぎることが判明します。既存のエンジンが既に最適化されていないため、既存のエンジンに最適でないパラメーターを配置する方が簡単な場合によく遭遇します新しいものの開発への投資を必要としません。 たとえば、コスモス2ロケットは、最初のステージが中距離ミサイルであり、2番目のステージが後に開発され、他の燃料コンポーネントが使用されていたため、6種類の流体で燃料を補給する必要がありました。
今日の技術が燃料効率の物理的限界に近づいているという事実によって状況は複雑になり、よく知られた原理に基づく新しいエンジンは古いものよりも質的に優れていません。
制御システム
制御システムは、2つの複雑なタスクを解決します。安定した飛行を維持することと、空間内の目的のポイントまでペイロードを取り除くことです。
持続可能な飛行
飛行中のほとんどすべての打ち上げロケットは空力的に不安定です。
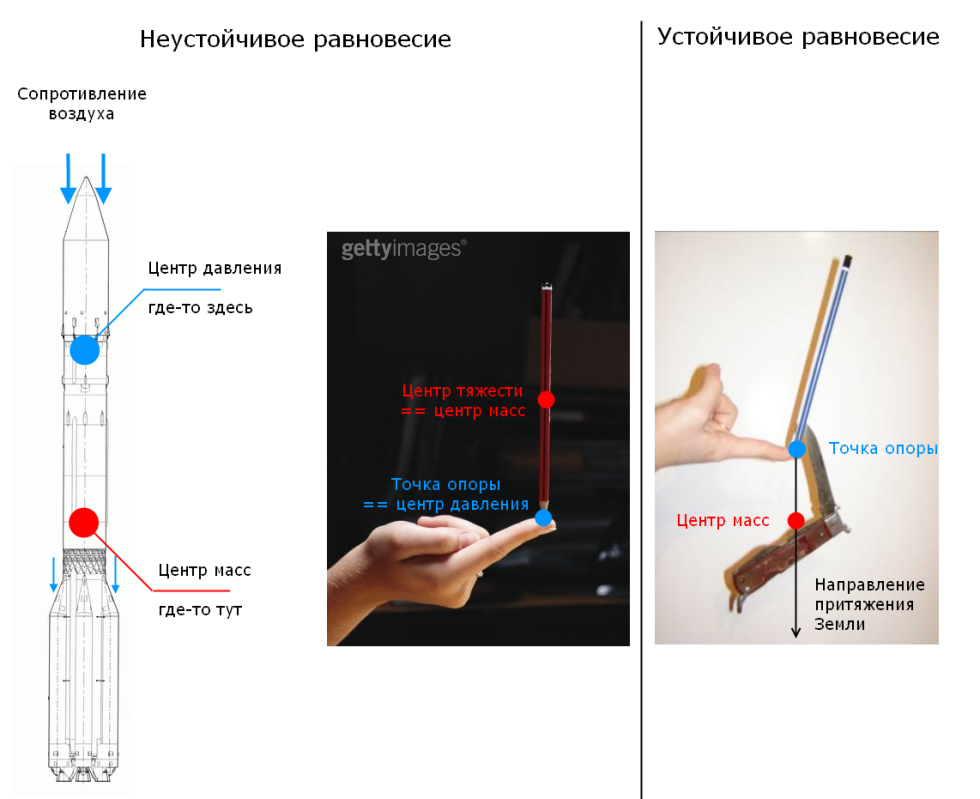
この問題の別名は「逆振り子」です。 また、制御システムは不安定なバランスを維持し、正常な飛行を保証し、さまざまな不快な影響を防ぎます。
育種精度
最新のデジタル「Proton-M」には、出力の精度に関する以下のパラメーターがあります。
- 近地点±2 km
- Apogee±4 km
- 傾斜角±1.8 arcmin
- 排泄時間±3秒
オービターまたはカーバルスペースプログラムをプレイしていない場合、どれほど高い精度であるかを説明するのは非常に困難です。 目を閉じて車で運転している9分間の年齢を想像してください。±3秒の精度で、車よりも8センチ長く、2センチ広いガレージに運転します。
どのように機能しますか?
前の段落の車の例で目を閉じなければならなかったのはなぜですか? 宇宙には道路標識がなく、最新のシステムは外部ソースを使用せず、自律的に動作するためです。 慣性航法システムは、ロケットの位置の変化とそれに伴う加速度をキャプチャし、アクチュエータの制御信号を生成します。 制御システムには、いわゆる ジャイロスコープが配置され、位置を固定するジャイロ安定プラットフォームと、加速度を固定する加速度計。 プラットフォーム自体は、その位置を維持するために中断されます。
そして、これらは次のようになります。

左側は、 センターが作成するプラットフォームのコンピューターモデルです。 中央のピリュギナ は岡ミサイルシステムのプラットフォームであり 、右側はエアサスペンション付きのアメリカ平和維持軍ICBMのプラットフォームです。
現在、新しい原則に基づいたコンピューターとテクノロジーの開発のおかげで、ジャイロ安定化プラットフォームは徐々に過去のものになりつつあります。 従来のジャイロスコープはほとんどレーザージャイロスコープに置き換えられ、回転プラットフォームはストラップオンシステムに置き換えられており、ジャイロスコープと加速度計はケースにしっかりと固定され、そのデータはコンピューターによって処理されます。 ところで、家電製品のジャイロスコープは回転せず、レーザーでもありません-それらは振動します。 精度はまあまあですが、小さくて安価です。
信頼性対策
私たちの不完全な世界では、故障は複雑なエンジンだけでなく、単純なワイヤ、センサー、またはバルブにも影響を与えています。 したがって、特別な措置が取られます。
- アクチュエータは可能な限り複製されます。1つの要素が故障した場合、予備の要素がトリガーされます。 スペースシャトルのミッションSTS-112は、サイドの固体燃料ブースターを保持している主なパイロボルト起爆装置が故障したため、打ち上げ時の災害でほぼ終了しました。 幸いなことに、バックアップ起爆装置が機能し、適切なタイミングでパイロボルトが爆発しました。
- 測定機器は3倍になります。3組のセンサーが挿入され、「投票」され、センサーの1つに障害が発生した場合、2つの「健康な」センサーが正しい情報を提供し続けます。 3つのジャイロの地平線のうち2つが故障し、オートパイロットがピーク時に車を始動させたときに、航空事故が発生しました。 幸いなことに、パイロットが介入し、災害は発生しませんでした。 コンピューターの急増に伴い、4番目の「音声」(またはセンサーの1つではなく3番目)が追加される場合があります-「それがどうあるべきか」の数学モデル。
おわりに
ロケットテクノロジーのなじみのない、目立たない複雑さがより身近になり、ペイロードを正常に削除した後、ロケットだけでなくロケットも喜んでくれることを願っています。