MATLABの分散型および固定構造のH-infinity Control-これは2人の著者(Pascal GahinetとPierre Apkarian)による記事のタイトルです。ここで簡単に説明します。
比較的幅広い読者向けに書くことにしたので、管理システムが何であるかわからないとします。 投稿のトピックに興味のある方は、2番目の画像までスクロールしてください。
最初はプライベートから一般へ。 バスタブを水で満たす必要があると想像してください。 しかし、あなたが耐えられないほど寒くなく、燃えているように暑くありません。 ボールミキサーがあり、最大水圧を含めてロッカーを停止位置まで持ち上げるとします。 片手で水の温度を確認し始めます。 もう1つは、ロッキングチェアを左右に動かして、希望の温度を確保します。 これがすべてです-あなた、あなたの蛇口と水温-は制御システムです。 頭の中に必要な水温についての考えがあります。 クレーンがあなたに与えているものを手で「測定」します。 そして、他方では、希望の温度と水道水の温度の差を最小限に抑えようとしています。 写真では、次のように描くことができます。
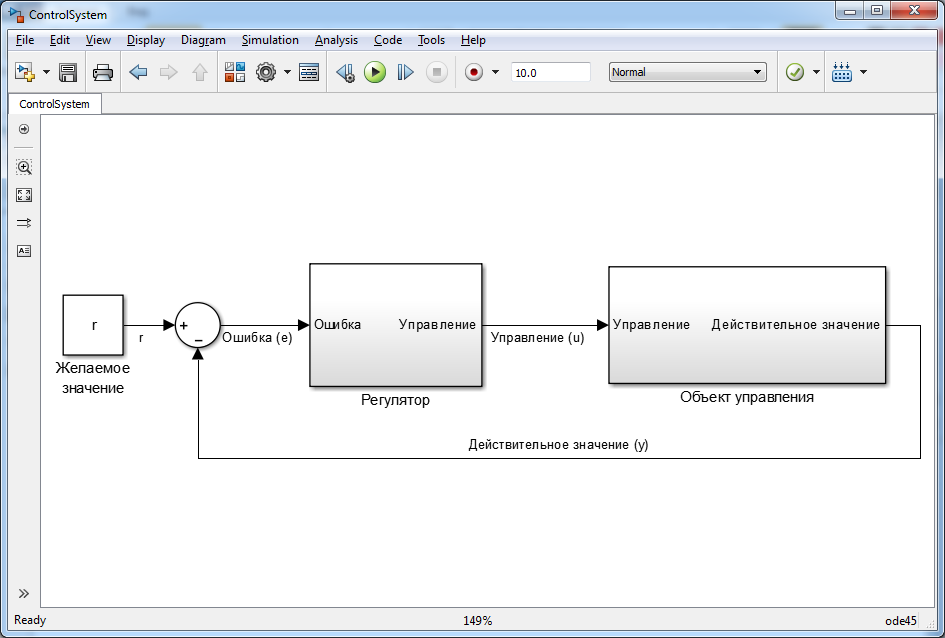
図 1.一般的な制御システム。
実際、上で描いたのはフィードバック制御システムの基本的な表現です。 そして、制御オブジェクト(この場合-ミキサー)の代わりに何でもかまいません。 そして、規制当局(この場合は人)の代わりに、何でもあります。
簡単にするための図では、センサー(この場合は人間の手)は別のブロックで取り出されていませんが、「Control Object」ブロックに含まれています。 オブジェクト自体は、変更したいパラメーターの値を持っているとだけ言うわけではありません。 また、簡単にするために、アクチュエータを別のブロック(制御オブジェクトに何らかの形で影響を与えるもの、この場合はもう一方のブロック)に入れませんでした。 オブジェクト自体も変化するだけでなく、何かの影響を受ける必要があります。 私たちは頭から希望の温度を取り、それを「暖かい」と呼びますが、これは、たとえば摂氏20度であることを明確にして言うことができます。 そして、センサーを使用して得た温度値を20から引きます(流水の下で手)。 そのため、「ミス」と呼ばれる値を取得します。つまり、水道水の温度が必要なものとどれだけ異なるかです。 そして、レギュレーター(私たちが理解している場合、脳を暖かくまたは寒くするために)の助けを借りて、この違いが存在しないことを確認します。
むかしむかし、人々は水道の蛇口に立って水を飲むこと(実際、それはかなり前のことであり、物体は他の何かである)はあまり興味深い仕事ではないと考えていました。 そして、どういうわけか目的の値(この場合は温度ですが、何でもかまいません)の受け取りを自動化することにしました。 そのため、センサー(最初は機械式のもの-フロートイン、申し訳ありませんが、タンク内の水量を「知っている」トイレ洗浄タンクなど)が表示され始め、その後電気式センサー(温度値を電圧に変換する温度センサーなど)が表示され始めました。 そして、ある種の電気的価値があるので、何かを管理する方法を考えているコンピューターにそれを転送してみませんか。 私たちは彼に私たちが望む価値を伝えるだけで、センサーはそれが実際に何であるかを彼に伝えます。
したがって、教育プログラムで少し締めくくると、制御システムを開発している人の仕事は、このコンピューターのルールを考え出すことです。そうすることで、短時間で不必要に迷わずに目的の値が得られます。 蛇口の水の温度だけでなく、車やヘリコプターの温度も制御する必要がある場合があるため、これは非常に難しい場合があります。 そして、コントローラーの複雑な方程式を考え出す必要がある場合、オブジェクト(オブジェクトの数学モデル)にそのような方程式を用意することは悪くありません。
制御量(出力)が多く、制御の可能性(入力)が多い場合、非常に困難です。 例のように。
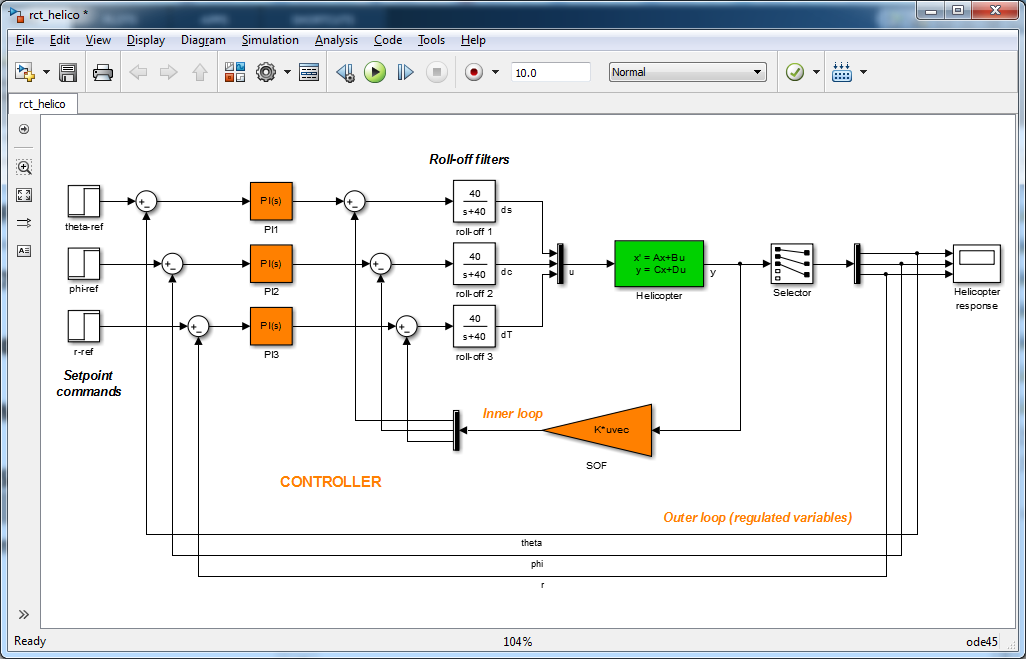
図 2.多回路ヘリコプター制御システム。
ここでは、投稿の冒頭でリンクを提供した記事にすでに進んでいます。 制御オブジェクト-ヘリコプターがあります(詳細な説明が興味深い場合は、記事のセクション6を参照してください)。 3つの入力信号があります(図2では、uという名前の緑色の状態空間ブロックの前に1行で表示されます。5つの出力信号(yという名前の緑色のブロックの後の行)。3つの制御システム構造を選択しました。 3つの外部回路(名前に数字の付いたオレンジのPIブロック)を制御するPIコントローラーと、SOFマトリックス(オレンジの三角形)でチャネルを分離するための内部制御回路。
制御システムの要件を設定し、何らかの方法で制御システムの21個のパラメーターを選択することは、小さなことです。 この記事の著者は、H-infinityに基づいた手法を提供しています。 しかし、同時に、エンジニアはタスクを設定するためにH-infinityが何であるか(完全に単純化されるため)を知る必要はありません。 周波数ドメインで要件を設定します。制御信号とセンサーからの信号があるモデルなどで、そのようなブロックを構成する必要があると言います。 そして、アルゴリズムを実行します。これについては、記事で詳しく説明しています。
MATLAB 2012a(および2012bではなく2011b)には、何が起きているかを明確に示す例があります(実際、記事で起こっていることはすべて繰り返すことができます)。 スクリプトを開くには、helico_demoの編集コマンドを実行できます。 これがどのように機能し、どのような結果が得られるかについてビデオを録画することを許可しました(ここでも、記事に記載されていることを繰り返します)。
その結果、21のパラメーターを構成し、タスク(チャネルの分離と過渡品質)を解決する安定したシステムを取得します。 ここにグラフィックを挿入しません。記事を参照してください。
コメントさせていただきます。