- 1つのRaspberry Pi上にホームVPNサーバーを作成します。
- 2番目のRaspberry Pi OpenVPNクライアント、Node.JSおよび3Gモデムでのインストールと構成。
今回は、USBハブを介してGPSレシーバーとWEBカメラを構成して接続します。
GPS受信機を接続して構成する
この目的のために、私はND-100S GPSドングルを購入しました
デバイスが検出されたかどうかを確認します。

私たちのデバイスは多産技術です。
デバイスのパッケージをインストールして、座標を取得して再起動します。
sudo apt-get install gpsd gpsd-clients python-gps -y sudo reboot
次に、gpsdサービスがロードされていることを確認しますが、入力デバイスを指定しません(このオプションは機能しません)。

このデーモンを無効にします。
sudo dpkg-reconfigure gpsd
最初の質問に「いいえ」で答えます。
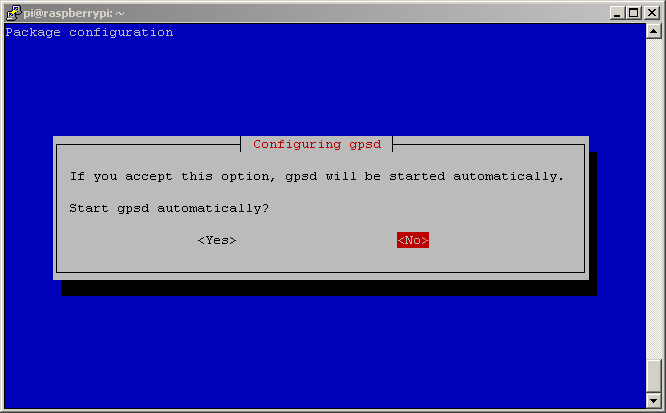
2番目も「いいえ」です。

/ etc / default / gpsdファイルを手動で修正することもできますが、パッケージ再構成ツールを使用したほうがよいと言われました。
デーモンを実行して、レシーバーを操作します。
sudo gpsd /dev/ttyUSB0 -F /var/run/gpsd.sock
次に、座標を取得してみます。
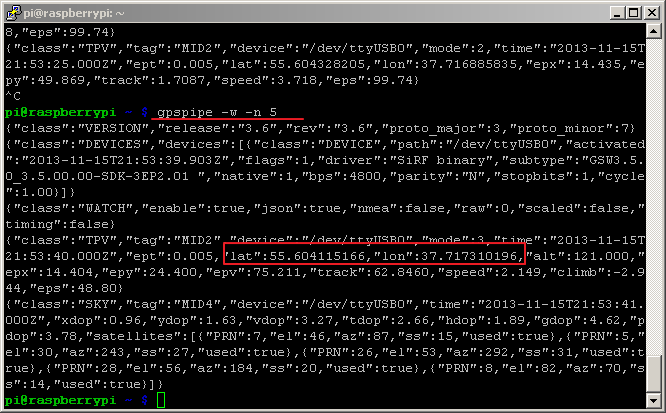
部屋が長時間または最初の開始時に座標をキャッチできないことがあります-参考のために、コールドスタートとホットスタートについて読むことができます。
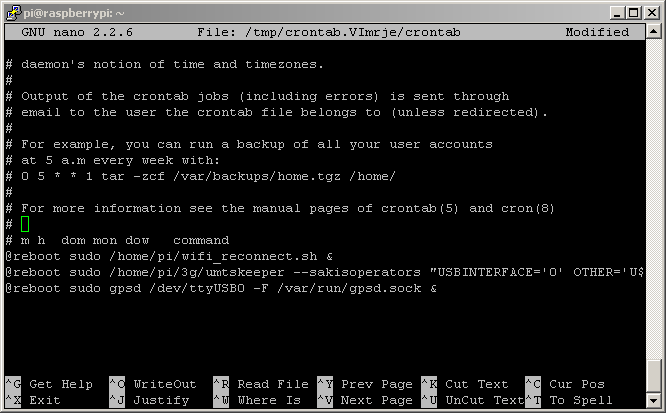
いいね! 次に、起動時にデーモンの正しい起動を追加します。
crontab -e
WEBカメラの接続とセットアップ
この目的のために、古いLogitech WEBカメラを見つけました。
実際にカメラを接続して確認してください:

pi@raspberrypi ~ $ ls /dev/video* /dev/video0
チャンネルの速度のため、ビデオよりも画像の送信を好みました。
さまざまなパッケージを検索してテストした後、私はfswebcamに落ち着き、それで数秒でイメージを取得しました。
インストールして、すぐにスナップショットを取得してください:
sudo apt-get install fswebcam -y fswebcam —save /home/pi/test.png

今それを取り、チェックしてください:
scp pi@192.168.2.6:/home/pi/test.png ./
ここで、192.168.2.6はOpenVPNサーバーから受信したIPアドレスです。
伝送速度に応じて、画像の解像度と画像処理形式を調整できます。