その主な欠点は、KKmultiopterコントローラーです。これは、その機能において非常に原始的です-地平線を維持する方法さえも知りません。 さて、この欠陥を修正してください!
以前のレシピに従ってすでに構築した人を安心させるために急いでいます-アップグレード予算はたったの$ 40-55です。 ゼロから構築する場合は、設計を改善する機会があります。
私は2番目のヘリコプターを作りました それのためのコンポーネントはずっと前に購入されました。

だから、時間が経つにつれて、電子機器は安くなっています。 中国の兄弟たちは、別々のコンポーネントからフライトコントローラーを組み立てる必要性を私たちを解放します。 今日の主役は、Crius Multiwii SEボードです。

Crius MultiWii SE
彼女はどんな人ですか?
本質的に、これは必要なセンサーを備えたArduino互換のボードです。
ATMEGA328P-マイクロコントローラー
ITG3205 3軸ジャイロスコープ(角速度センサー)
BMA180(3軸加速度計)
BMP085(圧力センサー)
・HMC5883L三軸磁力計(コンパス)
必要なものと理由を把握しましょう。
ジャイロは、クックボードと同じ機能を実行します。これは、ヘリコプターの偏差を判断し、制御ボードがそれらを補正できるようにします。
加速度計 -重力ベクトルgがヘリコプターの座標系に投影されるために、「底」がどこにあるかがわかります。 このように地平線を保つのに役立ちます。
圧力センサー -まあ、それは単なる高度計です。高度を維持するために使用できます(精度は低いですが、何もないよりはましです)。 必要ありません。
磁力計 -またはコンパス。 北への方向を決定し、垂直軸の周りのヘリコプターの回転を補正できます。垂直軸は、加速度計とジャイロスコープでは捕捉できません。 役に立つ
いいね 奇跡の費用はいくらですか?
バージョン0.2では、私が持っているように、 31.99ドルかかりますが、すでにrctimer.comで終了していますが、goodluckbuy.comにあります
そしてバージョン1.0では38.99ドルかかります
どちらを取るか-違いはありません。 41.99でv0.2を使用しました
経済のために気圧計と磁力計を犠牲にする準備ができている場合、またはカバーに突然何かがある場合-ライト(LE)バージョンを使用する-ジャイロスコープと加速度計しかありません。 たとえば、goodluckbaiで販売されています。
原則として、必須から、これはアップグレードする必要があるすべてです。他のすべてはヘリコプターのリストから120ドルで安全に購入できます。
便宜上、別のUSB-UART アダプターを購入しました:(arduino pro、pro mini、および私の工芸品をフラッシュするのに便利です)

熱収縮せずに販売されたので、誤って閉じたり、静電気で殺したりしないように押し込みました。
Arduino環境からリセットするには、DTRラインを備えた任意のアダプターを使用できます。
つなぐ
ボードのサイズはKKmulticopterと同じであるため、以前のバージョンのmulticopterの場所に簡単に配置できます。
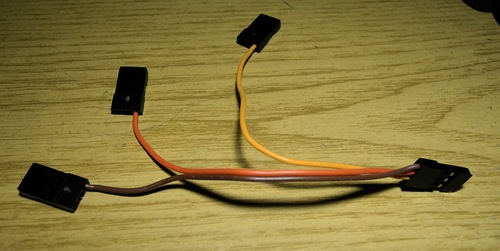
固定? 今、ワイヤー。 このキットを入手しました(USB-UARTを追加注文しました):

Crius MultiWii SE
ケーブルは非常に興味深いです-通常の1つと「ティー」2つ:
前の記事で、私は受信機のチャンネル番号について話しました。
ここでは、2番目のオプションに従って呼び出されます。
1-エルロン(エルロン、ロール)
2-エレベーター(ピッチ、ピッチ)
3-スロットル(ガス)
4-ラダー(ラダー、ヨー、ヨー)
受信機の最初のチャンネルを通常の配線で接続し、残りのティーは信号接点のみを接続します:
KKmulticopterとまったく同じ:

「 レシーバー接続 」
ボード上では、順番に次のようになります。
3、1、2、4チャンネル(これらはTHR、ROLL、PITCH、YAWとしてマークされています-ボードの写真の一番下の列の櫛)。
次に、ESCからケーブルを接続します。 ヘリコプターのX構成では、モーターの次の接続をお勧めします:(モーターにはArduino / Criusのピン数が記載されています)

左フロントモーター-D3
右フロントエンジン-D10
右後部エンジン-D9
左後部モーター-D11
接続およびインストールされたボードは次のようになります。

TTLコネクターに追加で接続しました(ボードの大きな写真の右上の4ピン、取り付けられたボードの写真には青いコネクターと白いコネクターがあります)追跡ロボットに使用したBluetoothモジュール:

ソフトウェア
ダウンロード:
Arduino 1.0
MultiWiiリリース2.0
FTDIコネクタを介してCriusボードをコンピューターに接続します。
MultiWii_2_0.inoスケッチをボードにダウンロードしてフラッシュします。 通常のArduino Duemillanove w / Atmega328のようにステッチされています。
次に、MultiWiiConf_2_0フォルダー(たとえば、application.windows32のMultiWiiConf_2_0.exe)からosのコンフィギュレーターのバージョンを実行します。
FTDIアダプターを作成した左側のポート(15番目にあります)を選択します。すべてが正しく実行されると、ポートのリストが緑色に変わります。 [開始]をクリックします。正しくフラッシュされたコントローラーにセンサーデータが表示されます。
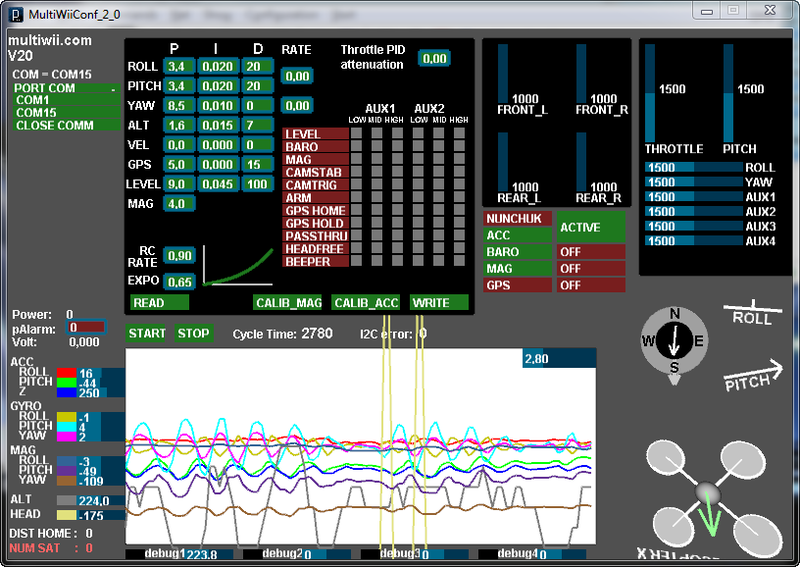
無線リモコンのスティックをかき混ぜます-それらはプログラムに表示されるはずです。
[読み取り]をクリックし、設定を検討します。PID係数およびその他の設定を参照してください。
係数を変更した後、書き込みボタンを使用して書き込むことを忘れないでください。
GUIを使用して設定の詳細を確認できます。
私のように、FTDIケーブルの代わりにBluetoothモジュールを接続している場合は、Android電話のMultiWii Configuratorプログラムを使用して同じ設定を行うことができます。
プログラムはそれほど複雑ではありません。誰もが理解できると思います。
庭に出る前に、PID設定について注意深く読んでください。
カスタマイズされましたか? 留め具を確認し、路上でテストと構成を行います。
電話から直接調整しました。設定を読み取り、パラメータを変更し、書き込み、ポケットに電話を入れ、どのように動作するかを確認します。 注意してください-セットアップ中にヘリコプターをクラッシュさせないでください。
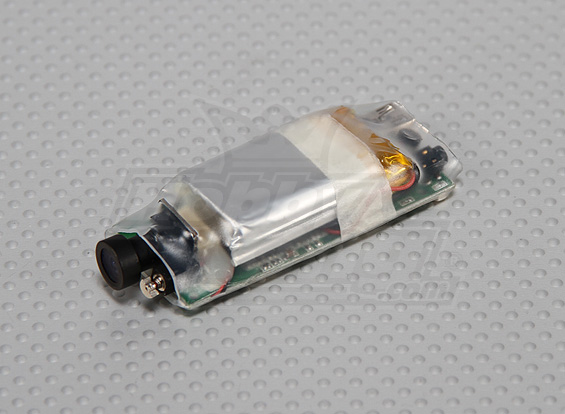
振動絶縁のためにラッピング乳頭セロファンを通してヘリコプターの上部に小さなカメラを取り付けました
トレーニングのために、中国人が荷物を保存するために置いたエアバッグから「シャーシ」を作りました。

Quadrocopter R2
飛んだ!
PS同じヘリコプターをお望みの方、スペアパーツ:
モーターTurnigy L2215J-900ブラシレスモーター(200w) $ 11.81
レギュレータTurnigy AE-25AブラシレスESC $ 10.29
6個セットあたり4.47ドルの正回転および逆回転プロペラ。
HobbyKing QuadcopterフレームV1 $ 14.99
バッテリーTurnigy 2200mAh 3S 40C $ 14.99
残りの小さなものと無線機器は、 前の記事で説明したもののいずれにも適合します。 er9xファームウェアと6チャンネルのHobby King 2.4Ghzレシーバー6Ch V2レシーバーを搭載したTurnigy 9xハードウェアを使用します(ネイティブの8チャンネルよりも小さくて安価です)
Yandex-photosをクリックすると、何がどのように修正されるかをフルサイズの写真で確認できます。 アルバムには、組み立てプロセスの他の写真が含まれています。
PPSの質問は 、 ここまたは投稿のコメント内のコメントで最もよく尋ねられます 。多くの場合、個人的なやり取りで同じ質問をするからです。
お気軽にお問い合わせください。ただし、全員に一度に回答した方が良いでしょう。
UPD。 HobbyKing Quadcopter Frame V1の代わりに、別のものを用意してください。 少なくともQ450グラスファイバークアッドコプターフレーム450mmまたはrctimerのRM450-私は自分で注文しました。 私のフレームは安定性と剛性の面で最高の面を示していませんでしたが、お金のために比較的うまく飛んでいました。 トレーニングの場合、ほとんどの場合、破損すると、残りのコンポーネントが保護されます。
素敵なフライトを!