GNSS navigation and localization has long been a standard in our daily lives. The use of this system has become standard for the unmanned vehicle NPO StarLine OSCAR . While most people use simple GPS receivers in their phones, OSCAR uses high-precision GNSS solutions. But first, what is GNSS in general, and how does it work?

What is GNSS?
GNSS stands for Global Navigation Satellite System (or Satellite Navigation System ) and is used as a general term for satellite localization with global coverage around the globe. As of 2019, there are several major satellite constellations :
- GPS (USA), 31 satellites
- GLONASS (Russia), 24 satellites
- Beidou (China), 23 satellites
- Galileo (European Union), 26 satellites
- NAVIC (India), 7 satellites
- QZSS (Japan), 4 satellites
How does it all work?
Take for example the usual GPS in our phone. There are always at least four GPS satellites in range from Earth. Each of these GPS satellites sends position information and current time to GPS receivers at a fixed interval. Well, the distance between the GPS receiver and the satellite is calculated by finding the difference between the time the signal was sent from the GPS satellite and the time the signal was received by the GPS receiver.
As soon as the receiver (for example, your smartphone) receives a signal from at least three satellites, your location (or rather your phone) is calculated using trilateration . GPS needs at least three satellites to calculate the 2D position (longitude and latitude) and four satellites for the 3D position (longitude, latitude, altitude).
Why does GPS not work well in urban environments?
Although GPS works pretty well under the open sky, accuracy drops dramatically in urban conditions (the error can be 50 meters or more): tall buildings, wires, bridges and other objects - all this worsens the accuracy of positioning.
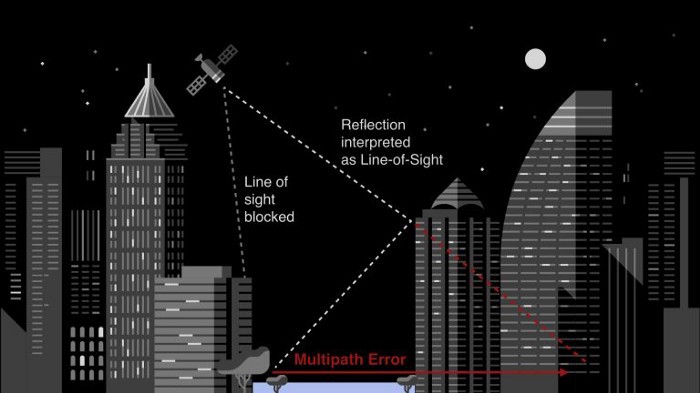
Reflection of satellite signal in the city. Uber Photos
Buildings often interfere with the direct line of sight of satellites, and while the signal from the satellite "flies" into your receiver, it manages to bounce off the buildings several times and come with distortion. Due to such reflections, positioning accuracy is significantly reduced (sometimes ± 500 meters). You must have encountered a situation where when ordering a taxi your location on the map was not displayed correctly.
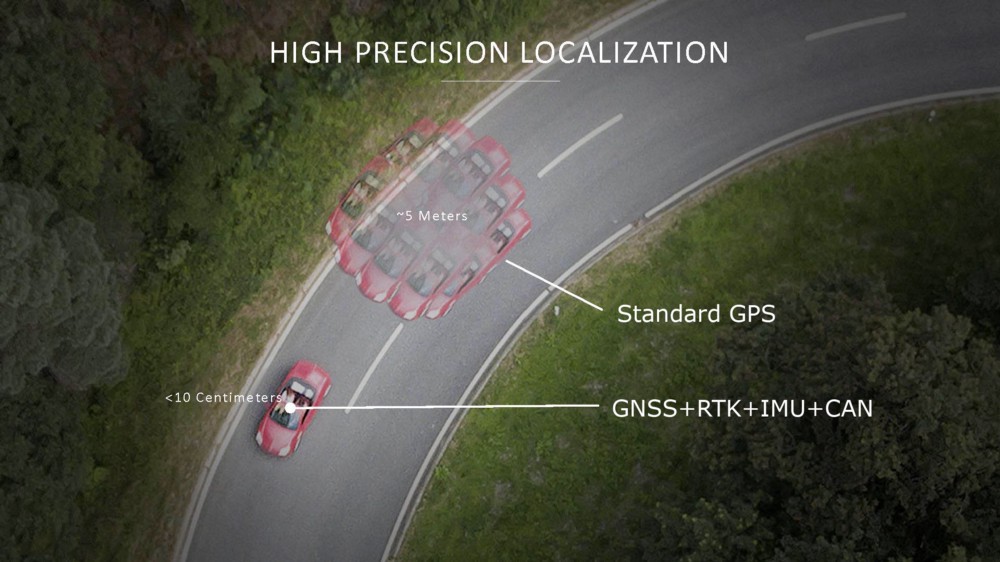
To eliminate these problems, we use high-precision GNSS receivers, which significantly increase positioning accuracy using IMU (inertial measuring modules), information from the vehicle’s CAN bus, RTK corrections, and a little more magic.
Improved accuracy
There are several basic ways to improve accuracy. Take a look at the most popular:
- IMU (Inertial Measurement Module) is a set of accelerometers and gyroscopes that provide 3D measurements. By itself, the IMU does not provide data on the location (position, altitude, speed), but provides useful information for calculating the location in places where GPS does not “catch” (tunnels, parking lots, etc.);

Typical IMU
- RTK corrections significantly increase location accuracy to 1–2 centimeters in real time. The bottom line is simple - the so-called base stations are located throughout the globe. A specific base station knows the errors in its area and reports them to the receiver, and the latter, in turn, takes these corrections into account and gives a more accurate solution;
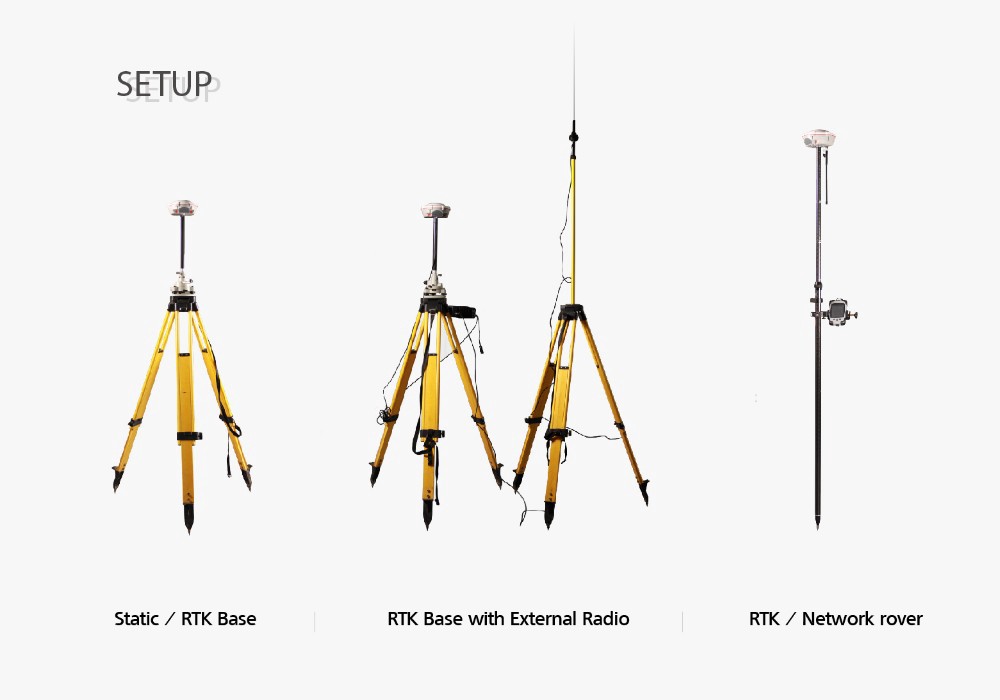
By and large, the base station is a GNSS receiver in the “station” mode + software + radio / Internet channel
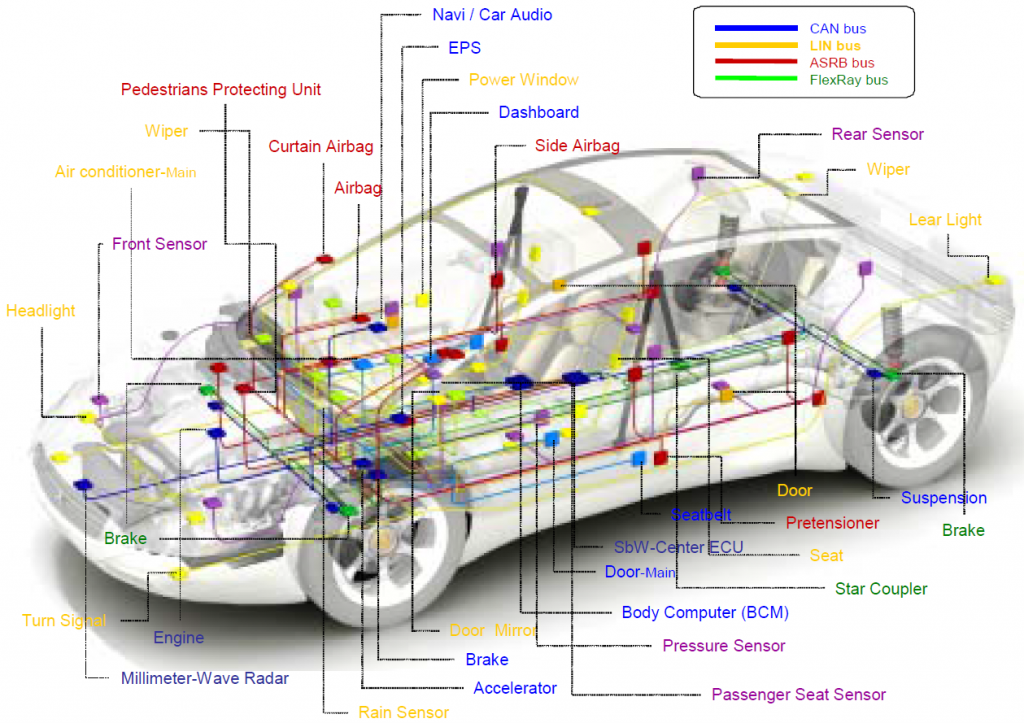
- CAN-bus is also useful in calculating the location, as the car provides useful data on speed, wheel speed and other characteristics.
Did you know that in our OSCAR?
OSCAR and high-precision GNSS receivers
Centimeter accuracy is necessary for all unmanned vehicles, not just OSCAR. Imagine for a second that it would be if the drone used conventional GPS with an accuracy of ± 50 meters:
Such low accuracy will definitely lead to accidents. That is why in the process of working on OSCAR, we conducted research and tested a number of GNSS receivers, testing them in difficult conditions of dense urban development.

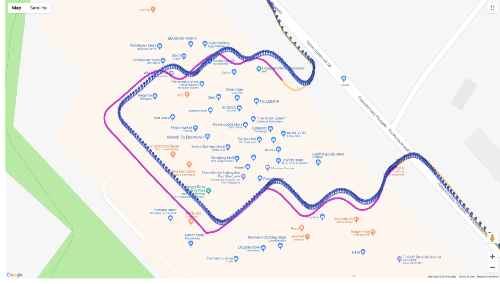
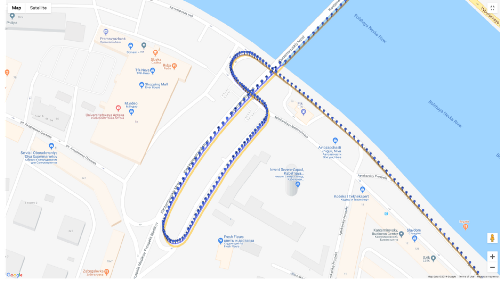
There’s only one car, but several GPS tracks
As a result, we settled on two solutions:
- NovAtel PwrPak 7D-E1
- uBlox F9K
Both receivers showed excellent results and were successfully integrated into our software and hardware platform.
At StarLine, we enjoy making a safe drone a reality . If you are also interested in this topic and you want to build an unmanned future with us, then we invite you to the team !
The StarLine OSCAR (Open Source Car) project is open to specialists from the Open Source Community, where everyone can participate in the process of developing a drone at the code level, try out their algorithms on a real car equipped with expensive equipment.
Twitter: twitter.com/starline_oscar
Website: smartcar.starline.ru
GitLab: gitlab.com/starline/oscar