
1.はじめに
「...昔、遠く、遠くの銀河で...」-もちろん、「どこか遠くの銀河」でなければ、どこに産業オートメーションネットワークの適切な例を見つけることができますか? 実際問題として、この観点からは、登録された光の剣を勇敢に潜伏している悪役とそのドロイドの蒸し肉(井戸、または金属の削りくず)に変えるジェダイ・ルーク・スカイウォーカーまたは彼の同僚や先生のようなポジティブなキャラクターにはまったく興味がありません関連者、「暗い」側の非常に「ネガティブな」代表自身、特に喘息のwhiを黒い空間のガスマスクに嗅いでいる人。 私たちの場合、大胆不敵な冒険家が最前線に来ます(読んでください-彼はまだスカムバッグです!)、元海賊と密輸業者、後に新共和国の将軍、ミレニアムファルコン宇宙船の勇敢で必死の船長になりました")ハン・ソロ。 実際、この作業の枠組みでは、実際に船自体にもっと注意を払う必要があります。 より正確に-ソロ大tainと彼の最高責任者チューバッカの参加で実装された彼の有名な修正について。
2.自動化の対象:簡単な概要と同様に短い歴史的遠足
Correllian Engineering Corporation(CEC)が製造する貨物船であるMillennium Falconは、かつて密輸業者Lando Calrissianに属し、sabaccで後者にbeatられた(カードが何であるかを知らない)ことを思い出してくださいは-ドミノではない)キャプテンソロ。 カーンはその時までにケッセルアークの最初のフライバイをすでに完了しており、特定の犯罪者でよく知られていました。 船はランド自身とその後のソロの両方で何度も再構築され、修正されました(一般に、目的は明確です)-その結果、彼の使い古されたパッチングされた外観にもかかわらず、最も機動性のある高速船の1つとして名声を獲得しました銀河。 ミレニアムファルコンが訪れたトラブルや冒険は言うまでもなく、乗組員と乗客のおかげで、すべての惑星と星の列挙は意味をなさず、特にこれらすべてがトン単位で詳細に文書化されているため、この作業の範囲を超えています光沢のある出版物と何キロものフィルムストリップ。
ファルコンは、コレリアでのヤヴィンの戦いの前に紀元前60年頃に建てられ、工場改造「f」の典型的なYT-1300クラスの貨物船でした。 当時、YT-1300は犯罪者の間では非常に人気がありました。なぜなら、軽貨物船は通常、法執行機関の間で疑いを抱かなかったからです。 同時に、セキュリティ会社のパトロールが密輸品を船上で検出した場合、十分に強力なエンジンのおかげで、YT-1300は追跡から逃れることができました。 さらに、これは一見したところ、貨物および旅客輸送を目的とした完全な民間製品である「CEC」は、いくつかの法的(またはまったく法的でない)変更が最小限の投資で軍艦の状態に達したモジュラー設計により、競合他社と比較して有利です。
このクラスの他のオブジェクトと同様に、YT-1300はハイテク統合オートメーションシステムなしでは想像することは不可能に思えます。これは、システムオブジェクトのリモートコントロールと監視、快適な乗組員の労働条件の形成、効率的な消費など、幅広いタスクに対するソリューションを提供する必要があります生命維持装置、技術室へのアクセス制御、セキュリティおよび火災イベントなど。 明らかに、分散プロセス制御システムプラットフォームを実装するタスクを解決するために単一の統合アプローチを使用することが成功の鍵です。 いくつかのメーカーの異なる世代の機器を使用する自律システムのセットの統合とは対照的に、異なるプロトコル、単一のスケーラブルなプラットフォームは、機能的に異なるプロセスのサブシステムの柔軟な統合と管理を提供し、ローカルおよび中央制御ノード間の情報ルーティングと制御データフローを実行します、施設の建設の限界を超えて、展開された複合施設の能力を簡単に高めることができます ST。
残念ながら、前述の内容はYT-1300にはまったく適用されません 。ご存知のように、CECは企業の企業で結ばれた多くの才能あるエンジニアと、大手企業との確立された商業関係(例えばGirodyne、 Quadexなど)、長年にわたって個々のモジュールの製造に特化しており、ケースの断片から独自のIT充填で終わります。 これらの企業のワークショップでは、ユニットと機能ユニットのパイロット設置、および制御サブシステムのコミッショニングが実施され、構造の組み立て、コンポーネントの設置、および車載ネットワークへの接続は、同じ「出向」技術専門家によって企業の主要造船所で実施されました。 特定のサブモジュールの目的と範囲に応じて、また企業と長年にわたる協力の間に開発された自動化システムのコンポーネントのメーカーとの間で開発された関係により、企業内の隣人の選択と一致しないことが多い非常に特定の技術が優先されたことは明らかです。 結果は-何ですか? -正しく、典型的な分散制御ネットワークは、タスクのフレームワーク内で十分に機能し、完全に機能していますが、それでも(Chewbaccaが許してくれます!) IT-zooです。
YT-1300のすべてのサブシステムの詳細な説明は意図的に提供していません。もちろん、これはこの作業の範囲外です。名前のリストのみが数ページのテキストになります。 したがって、問題のオブジェクトだけでなく、多くの企業、組織、および企業の特徴である、産業オートメーションシステムの典型的な分散制御ネットワークに対応する一般化されたブロック図のいくつかの条件付きの例に限定します。 このようなネットワークは通常、3つのレベルで構成される階層構造を表していることを思い出してください。 最初の下位レベルであるデバイスレベルは、従来、FieldBusと呼ばれていました。 このレベルの主な目的は、フィールドデバイス(センサー、メーター、アクチュエーター)と高レベルデバイスであるプログラマブルロジックコントローラー(PLC)の間でリアルタイムの情報交換を提供することです。 データ転送速度は通常数百Kbpsですが、選択したテクノロジーによっては10 Mbpsを超える場合があります。 同時に、リアルタイム実装の要件を考慮して、サイクルタイムは10ミリ秒を超えてはなりません。 そのため、Profibus、CAN、Foundation FieldBusなど、ネットワークの下位レベルで特殊なプロトコルが使用されています。産業オートメーションネットワークの次のレベルは、制御レベルです。 このレベルには、PLC、SCADA技術の自動化されたディスパッチ制御システム、分散DCS制御システム、およびそれらに基づいて開発された制御システムがあります。 このレベルでの一般的なサイクル時間は100ミリ秒を超えてはなりませんが、最近のシステムではより厳しい要件が課せられ、このパラメーターの値が2倍以上(最大50ミリ秒)減少します。 下位レベルとネットワーク制御レベル間の相互作用は、パラレルまたはシリアルスイッチング回路を使用して実行されます。 最初のケースでは、個々のPLCポートは、適切なガイドシステム(銅線、光ファイバー)を使用して、センサーまたは機構の個別のトランスデューサーに接続されます。 このスキームでは、多数の物理回線をインストールする必要があります。これにより、ネットワークのインストール中の作業量が大幅に増加し、操作が大幅に複雑になります。 したがって、低レベルの産業オートメーションシステムのネットワークの大部分は、シリアルスイッチング方式を使用して制御レベルと対話します。 このようなスキームは、一般的なバス、リング、スターのトポロジを使用して実装されたシリアルデータ交換チャネルに基づいて動作します。 最後に、企業レベルはトップレベルのネットワークを形成します。これは、コンピューティングプロセスの組織化の分散スキームを備えた制御システムを構築するための基盤です。 実際、現在、イーサネットはこのレベルで支配的です。 IEEE 802.3ae(10 GbE)標準に準拠するシステムが積極的に導入されています。 開発中のIEEE 802.3ba規格は、40および100 Gb / sの2つのデータレートをサポートしています。 スコープ40GbE-ストレージエリアネットワークの高性能サーバークラスター間のデータ転送(SAN-ストレージエリアネットワーク)。 同様に、100GbEはスイッチングバックボーンノードで使用され、データセンターでのルーティングとデータ集約をサポートすることになっています。
オートメーションシステムYT-1300の基本的な分散制御ネットワークを記述するために、上記のように、下位レベルネットワークのいくつかの特殊なプロトコルを使用し、システムの4つの条件付きグループを区別することが提案されています。 各グループには、1つまたは別のフィールドバスプロトコルを使用して条件付きで実装されるサブシステムのセットが含まれ、その対応関係を表にまとめています。 1。
タブ。 1。

最初に、インフラストラクチャ管理および生命維持システムのグループ「1」を検討します(図1)。
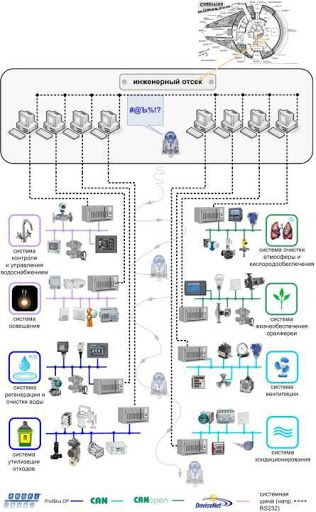
YT-1300の基本構成のグループ「1」に含まれるオブジェクトのインフラストラクチャセグメントの制御サブシステムは、(たとえばRS232システムプロトコルに基づいて)共通の低速トップレベルネットワークに結合されると想定されています。 それらのそれぞれは、産業用コンピューターと対応するPLC、そのプロセッサーモジュールが論理的および技術的な制御機能を提供するPLC、およびPLCソフトウェア(PO)に基づいて構築されています-PLCは、所定の動作モードに従ってシステムの実行要素を順次制御します コントローラのプログラミングは、コンピュータ(PC)にインストールされたソフトウェアパッケージを使用して実行されます。このソフトウェアパッケージは、適切なインターフェイス(RS232など)を介してPLCに接続できます。 システムの機能の監視は、技術室の中央に位置するエンジニアリング(オペレーター)ステーションのPCモニターに表示されるデータの分析結果に従って、オペレーターによって実行されます(この場合、エンジニアリングコンパートメントのCECによって規制されるYT-1300の図面による)。 同様に、オペレーターのパネルから直接データを取得することもできます(この場合、「クローラー」のこの定位置は、有名なR2-D2などの陽気なドロイドの1つに割り当てることができます)。 プロセス制御は、PCエンジニアリングステーションを使用してリモートで、およびオペレーターのコンソールから実行されます。
残念ながら、停止する必要があります。 素材が多すぎるため、1つの投稿の枠組みに収まりません。 記事全文はこちら 。
著者:
- アイデアと実装:バーディン・アントン
- いくつかのアイデアとホットな議論: Shopin
- コンサルタント:Sidorov Artem
PSはい。しかし、Softingがそれとどう関係しているのかを尋ねます。 質問ありがとう! これについては記事で。
PPS著者は草を吸わなかった;買収に関して私達に連絡しないでください。