 シリコンの進化は、機械が自己改善できることを示しています。 生成後の選択および選択により、最も適合したサンプルをデバッグおよび選択できます。 現在、ロボットは科学者に、自然条件での動物の行動戦略がどのように発展し改善されるかを示しています。 食物の探索、競合他社との闘い、自然の信号、それらが日常生活にどのように影響し、どのように形成されたか。 スウェーデンの研究所のインテリジェントシステム研究所では、10台のロボットのグループが食料を奪い合った。 これは何から来たのですか?
シリコンの進化は、機械が自己改善できることを示しています。 生成後の選択および選択により、最も適合したサンプルをデバッグおよび選択できます。 現在、ロボットは科学者に、自然条件での動物の行動戦略がどのように発展し改善されるかを示しています。 食物の探索、競合他社との闘い、自然の信号、それらが日常生活にどのように影響し、どのように形成されたか。 スウェーデンの研究所のインテリジェントシステム研究所では、10台のロボットのグループが食料を奪い合った。 これは何から来たのですか?
実験のために、直径12 cm、高さ15 cm、リチウムイオン電池2個を備えたs-botを選択し、約1時間の自律的な存在を与えました。 ロボットには、400 MHzの周波数を持つXscaleプロセッサ、データ処理に使用される64 MBのRAMと32 MBのフラッシュメモリ、および低レベル処理用の12個のPICマイクロコントローラーが搭載されています。 自己組織化Linuxがオペレーティングシステムとして使用され、中央ステーションとの通信はWiFiを介して行われます。 ロボットの感覚機能には、赤外線センサー(ロボットの周囲に15個、ロボットの下に4個)、電力および速度センサー、湿度および温度センサー、8個の光センサー、円形のカメラ、4個のマイクが含まれます。
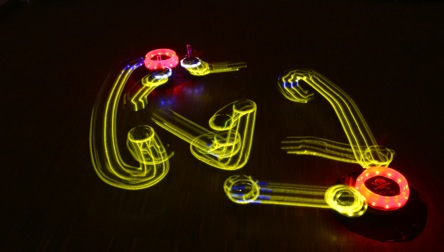
ロボットは、アリーナの一方の端にある明るいリングである「食料源」を検索するようにプログラムされていました。 彼らはセンサーを使用して近距離でのみこのソースを「見る」ことができました。 アリーナのもう一方の端には、「中毒」と見なされる暗いリングがありました。 ロボットは、食料や毒の近くでどれだけの時間を費やしたかに応じてポイントを獲得し、それによって彼らの人工生命がどれほど成功したかを示しました。
そして、彼らは互いに「通信」することができました。 各ロボットは、他の人がカメラで検出できる青色光を投影し、食物の位置を示すことができます。 したがって、ロボットの光は情報の運搬者です。 しかし、数世代後、ロボットは進化して、子孫に光と通信するだけでなく、ライバルを欺くことも教えました。
ロボットは、各ロボットにバイナリ「ゲノム」によって制御される人工ニューラルネットワークが装備されていたため、進化できました。 ネットワークは、ロボットのセンサーに接続された11個のニューロンと、2つの車輪と青色を制御する3個のニューロンで構成されています。 ニューロンは33個のシナプスを介して接続され、各シナプスの信号強度は1つの8ビット遺伝子によって制御されます。 したがって、各ロボットには、センサーからの情報にどのように応答するかを制御する264ビットのゲノムがあります。
人工進化は、ロボットとセンサーの両方がモデル化されたEnkiのシミュレーション環境で行われました。 その後、 Teem進化型ロボットフレームワークを使用して最高のコントローラーを進化させ、その後、実際のロボットに移しました。
この実験では、各ラウンドは10個のロボットの100個のグループで構成され、各グループは別々のアリーナで食べ物を競い合いました。 最も多くのポイントを持ち、人口に最も適した200台のロボットは、次のラウンドに進みました。 彼らの33個の遺伝子は、わずかに変化する可能性のある1/100の確率でランダムに変異し、ロボットはゲノムを混合するために「一緒になって」いた。 その結果、前世代の最も成功した代表者から行動が継承された新しい世代のロボットができました。

最初の実験では、ロボットはランダムに光を発していました。 しかし、数世代後、ロボットはより良くなりました...光はますます多くの情報を運び始め、ボットはわずか9世代後に光に焦点を合わせ始めました。
しかし、ロボットの状況は実際の動物の行動に似ていました。食物の場所に関する情報を送信することが常にロボット(動物)の利益になるわけではないためです。 フードリングにはロボット用の8つの場所しかありません。つまり、みんなが食料源の近くに集まったら、お互いを物理的に押し合う必要があります。 実験者が青色光の放出に関与する遺伝子の進化を許可したとき、闘争の効果は強まりました。
結果は何ですか? ロボットが最初にランダムに光を発し、食物の周りに集まった場合、その光は食物の位置を示しました。 進化後、ロボットはより秘密になりました。 50代目までに、彼らは競技場の他のどこよりもはるかに低い確率で食物の近くで光を発し始め、光自体はそれほど重要な情報源ではなくなり、ロボットにとって魅力的ではなくなりました。
しかし、光は完全に役に立たなくなりました。 ロボットがよりunningになり、光に依存しなくなったため、光が別のロボットの知覚に応じて真または偽と見なされる可能性があるため、食物の近くで輝いた人は一種の保護になる可能性があります。 したがって、シグナルをまったく与えないという進化的圧力は、前述の要因で希釈され、このため、世代を超えて光が使用されていました。

また、ロボットの行動は多様であったことを意味します。 無料の自然selectionでは、遺伝的ドリフト(遺伝子がランダムに変化するとき)などのプロセスが遺伝的多様性を簡単に生成し、それが個人の多様な行動を生み出します。 500世代の進化の後、ロボットの約60%が食品の近くで光を発することはありませんでしたが、ほとんどの場合、約10%のロボットがそこから光を発しました。 そして、ロボットの一部が毒の近くで光を発し始め、他のロボットを引き付けました。 一部のロボットは青い光に少し引き付けられましたが、彼が引き付けたロボットの3分の1は非常に強く、もう3分の1は彼に反応しませんでした。
実験者は、同様のプロセスが自然に発生すると考えています。 動物は、たとえば食物のために移動するとき、他の動物に不注意にこれを知らせます。 これにより利益相反が生じ、自然選択により、この情報を抑制または変更できる人は、たとえばマスキング、ステルス、干渉または虚偽の信号を使用して、より良い生活を送ることができます。 ロボットを使った実験のように、これらのプロセスは、自然界の膨大な数の異なる行動戦略を理解し説明するのに役立ちます。
この研究は、ロボットが技術的な領域をはるかに超えて使用できると信じるあらゆる理由を与えます。 この実験を行った研究者の一人が言ったように、「ロボットは、生物間の相互作用のメカニズムを研究し、よりよく理解するのに非常に役立ちます。 これはほんの始まりに過ぎませんが、生物学、心理学、医学の研究にロボットが使用されると確信しています。」
ビデオ6食べ物を探しているロボット(14 Mb)
食糧のために戦っているロボットの概略ビデオ(20 Mb)