ワイヤレス充電システムを「バカ」にすることはできますが、受信部分と金属物体を区別せず、渦電流で加熱します。 したがって、受信部がない場合、送信機は周期的に短いパルスを送信します。 彼らが受信部を持って来るとき、それはどんな電力がそれから必要であるかを送信部に伝えるパケットを送り始めます。
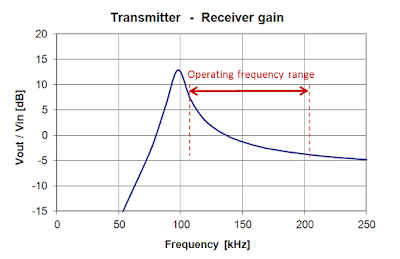
送信部は、グラフに示すように、共振を基準にして周波数を変化させながら電力を調整しながら、連続的に振動を生成し始めます。 共振から周波数が遠いほど、送信電力は低くなります。
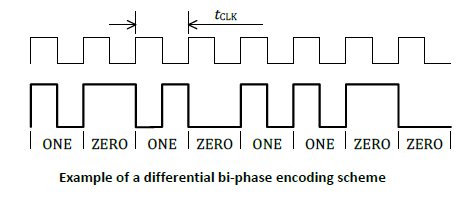
受信部から送信部にビットを送信するために、2つのトランジスタが小容量のコンデンサを受信回路に接続します。 ゼロと1をエンコードする方法は次のとおりです。
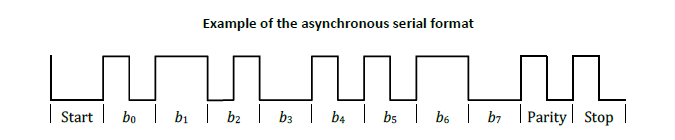
この場合、エラーが発生する可能性があり、その修正が必要です。 各バイトは11ビットで送信され、最初のビットは常にゼロに等しいスタートビットであり、バイト自体の8ビットが続き、次にパリティビット(バイトに偶数のユニットが含まれる場合は1に設定)、ストップビットは常に1になります。 パリティビットが一致しない場合、バイトは誤って受信されたと見なされます。
パッケージは、紹介、ヘッダー、メッセージ、およびチェックサムで構成されます。 エントリには11〜25ユニットが含まれます。 チェックサムが一致しない場合、パケット全体が誤って受け入れられたと見なされます。

標準のより詳細な仕様はこちらです。
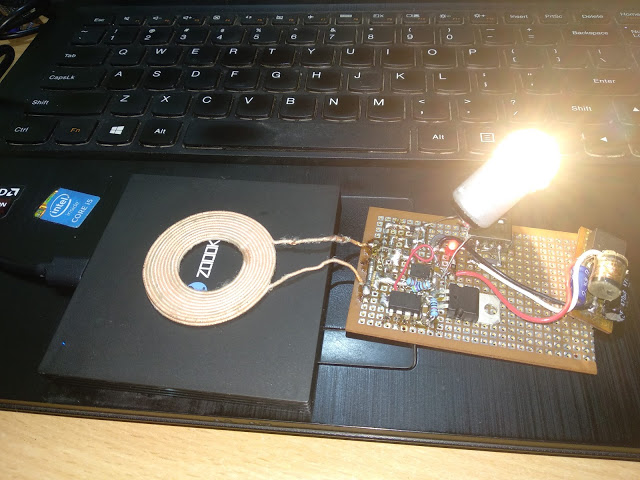
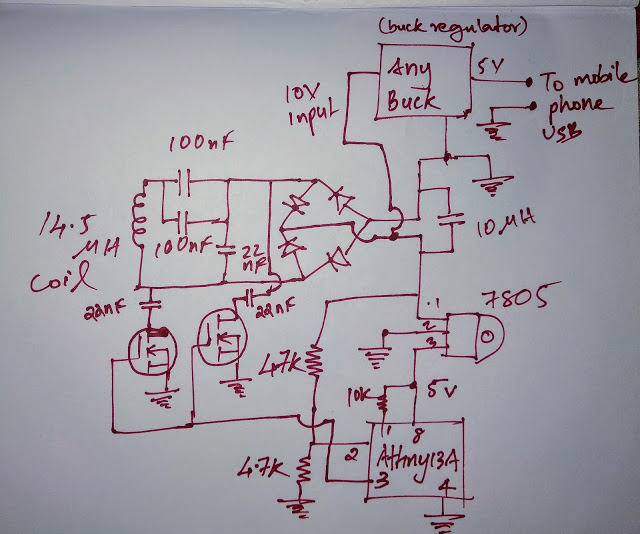
自家製の受信部は、回路(14.5μGのインダクタンスで10ターンの巻線、100 nFの2つのコンデンサーと22 nFの1つ)、整流器、フィルター(10μFコンデンサー)、22 nFコンデンサーを回路に接続する2つのトランジスタで構成されます、2つのスタビライザー-負荷のパルス(MC34063のシガーライターでの既製充電も適切です)およびマイクロコントローラーの線形、整流器から削除された電圧をマイクロコントローラーのアナログ入力に供給するための抵抗分割器、およびマイクロコントローラー自体。 プログラムのタスクは、トランジスタを制御し、送信部にコマンドを送信し、負荷が変化してもそのような送信電力を維持し、整流器出力の電圧が10 Vになるようにすることです。
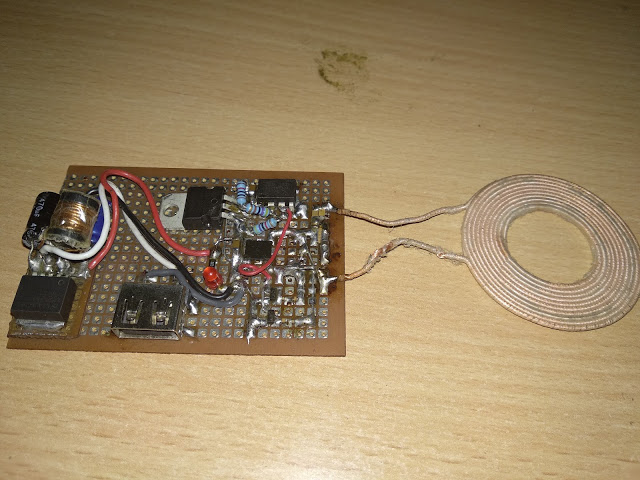
デバイス全体とボードの外観:

ファームウェアはこちらです。
ビデオ: