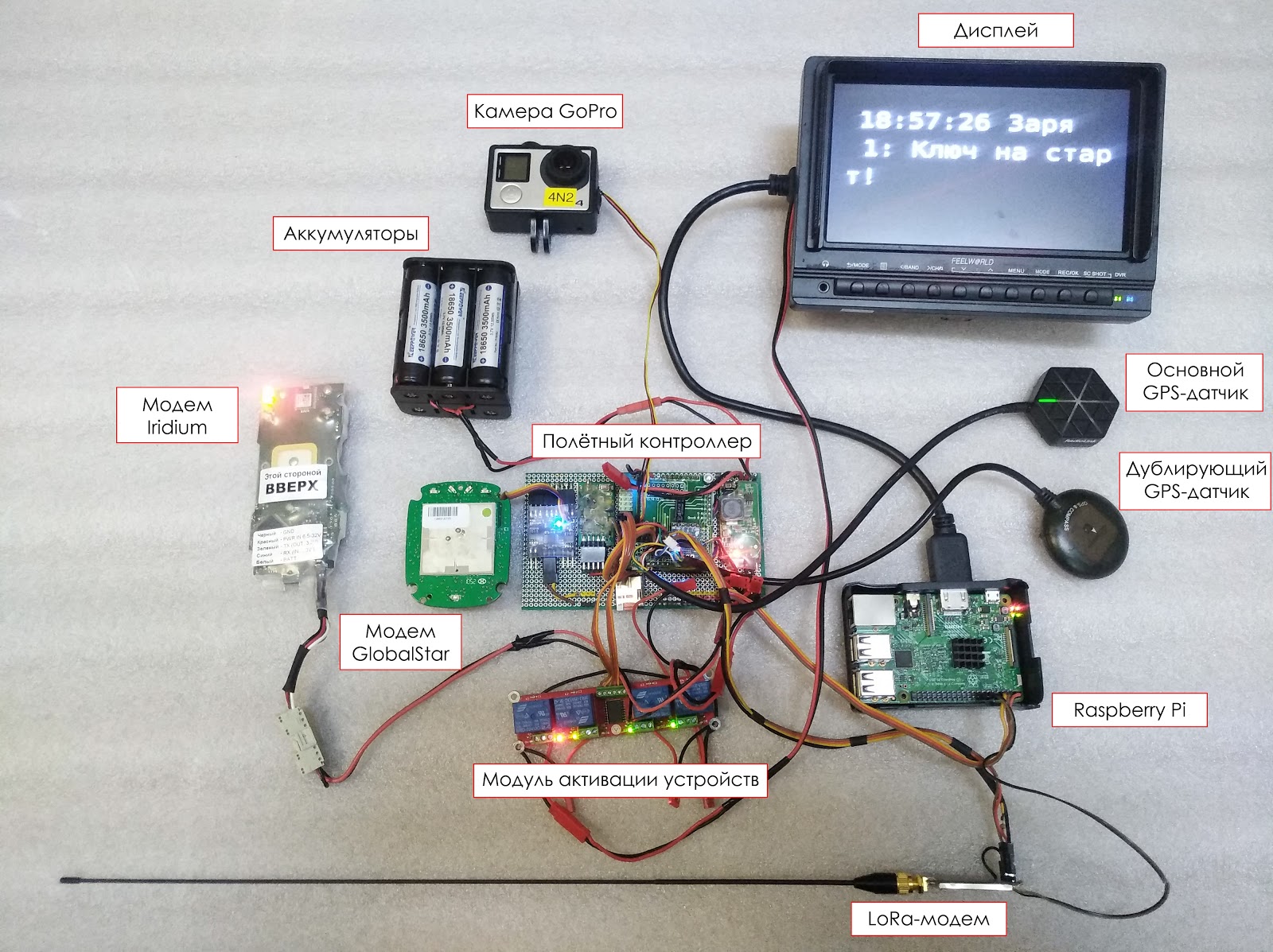
明日は、サーバーを成層圏に送ります。 飛行中、ストラトスタットはインターネットを配信し、ビデオとテレメトリデータを撮影して地上に送信します。 プロジェクト「Space Data Center」の技術面について話すことを何度か書きました(以前は「 Server in the Clouds 2.0 」という名前に対応していました )。 彼らは約束した-私たちは充実しています! katomの下には、鉄片とコードがいくつかあります。
Webサーバー
前のプロジェクト「クラウド内のサーバー」でさえ、2人の乗組員と本格的な気球で上がったとき、バッテリーアセンブリを備えた本格的なサーバーを取るのは合理的ではなかったとしましょう。 そして今、私たちは小さな成層圏の気球について話しています。それは1ではなく30 km上昇する必要があります。したがって、Webサーバーとして同じRaspberry Piを選択しました。 このマイクロコンピューターはHTMLページを形成し、別のディスプレイに表示します。
衛星接続
Raspberryに加えて、衛星ネットワークIridiumとGlobalstarのモデムが搭乗します。 ご存知のように、国内ネットワーク「Gonets」のモデムを追加する予定でしたが、事前に入手できなかったため、次のフライトで送信します。 衛星モデムを介して、Webサーバーがメッセージを受信し、プロジェクトページで送信できます 。 これらのメッセージはRaspberry Piに送信され、Raspberry Piはそれらから並んでHTMLページに表示されます。
重要な点:ロシア語のテキストメッセージの長さの制限は58文字(スペースを含む)です。 メッセージが長い場合、送信中に切り捨てられます。 また、すべての特殊文字はテキストから切り取られます。たとえば、
/\+$%&;''""<>\n
などです。
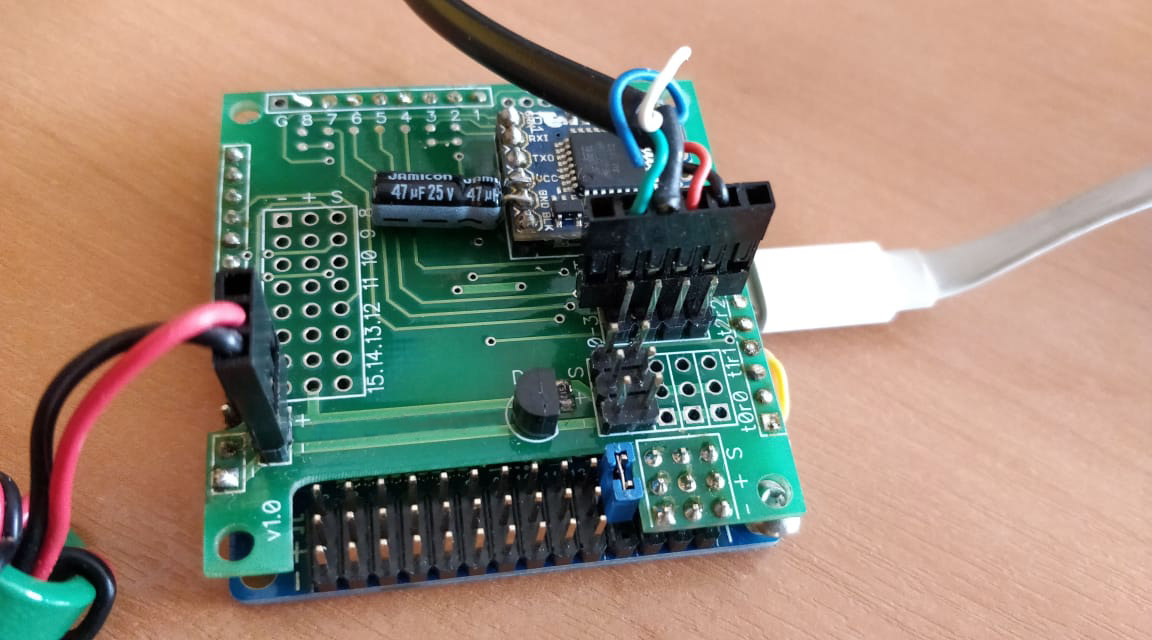
Raspberry PiにはUARTポートが1つしかないため、モデムからデータを収集してRaspberry Piに送信する中間ハブを介して衛星モデムを接続します。
無線モデム
Webサーバーは、受信したすべてのメッセージをディスプレイに表示するだけでなく、LoRa無線モデムを介してEarthにブロードキャストします。 そこで、成層圏からインターネットを配布するというアイデアをテストしたいと思います(Google Loonプロジェクトへの貢献)。 もちろん、ストラトスタットは本格的な通信リレーではありませんが、その能力が情報の大きな損失を伴わずに安定したデータ転送に十分である場合でも、特殊なシステムは事前空間からのインターネットの配信に確実に対応します。
テレメトリー
さらに、同じHTMLページにテレメトリデータを表示する予定です。 Raspberry Piは別のフライトコントローラーからそれらを受け取ります。
彼は、ハードウェアジャーモボックスの内側と外側の両方に配置できるさまざまなセンサーを調べ、ヒープ内の情報を収集し、それをとかし、求めている人に便利に提供します。 私たちの場合、Raspberry Piを要求します。 気圧、高度、GPS座標、垂直および水平の速度と温度を記録します。
フライトコントローラーからのデータは長い行で送信され、次のコードを使用します。
$str = 'N:647;T:10m55s;MP.Stage:0;MP.Alt:49;MP.VSpeed:0.0;MP.AvgVSpeed:0.0;Baro.Press:1007.06;Baro.Alt:50;Baro.Temp:35.93;GPS.Coord:N56d43m23s,E37d55m68s;GPS.Home:N56d43m23s,E37d55m68s;Dst:5;GPS.HSpeed:0;GPS.Course:357;GPS.Time:11h17m40s;GPS.Date:30.07.2018;DS.Temp:[fc]=33.56;Volt:5.19,0.00,0.00,0.00,0.00,0.00,0.00,0.00'; parse_str(strtr($str, [ ':' => '=', ';' => '&' ]), $result); print_r($result);
表示に便利な形式の配列に変換します。
Array ( [N] => 647 [] => 10m55 [MP_Stage] => 0 [MP_Alt] => 49 [MP_VSpeed) => 0.0 [MP_AvgVSpeed] => 0.0 [Baro rss] => 1007.06 [Baro_Alt] => 50 [Baro_Temp] => 35.93 [GPS_Coord] => N56d43m23s,E37d55m68s [GPS_Home) => N56d43m23s,E37d55m68s [Dst] => 5 [GPS_HSpeed] => 0 [GPS_Course] => 357 [GPS_Time] => 11h17m40s [GPS_Date] => 30.07.2018 [DS_Temp] => [f] .56 [Volt] => 5.19, 0.00,0.00,0.00,0.00,0.00,0.00,0.00 )
また、お客様のメッセージとともにテレメトリーデータを地球に送信します。 これを行うには、発射場所で受信ステーションを展開します。
ディスプレイとカメラ
サーバーが衛星通信を介して実際にメッセージを受信し、一般に成層圏に飛んで、私たちのオフィスにいないことを確認できるように、GoProが記録するディスプレイにすべてのメッセージを表示することにしました。 プロジェクトを準備する時間はほとんどありませんでした(しかし、それはいつ起こるのでしょうか?!)。したがって、Aliexpressとはんだごてを苦しめず、代わりに完成したデバイスを取りました。 私たちのニーズには、それだけで十分です。 HDMIを介してディスプレイをRaspberryに接続します。
また、GoProからのビデオを別のラジオチャネル経由でブロードキャストする予定ですが、どのように機能するかはまだ不明です。曇りが少ないと通信範囲が大幅に短くなる可能性があります。 しかし、いずれにせよ、着陸した成層圏気球を見つけた後、カメラからビデオをアップロードすると、「宇宙前データセンター」が受け取ったメッセージとその上昇の度合いを確認できます。テレメトリーは同じHTMLページに表示されます。さらに、地平線の一部が表示されます。
栄養
上記のすべての美しさは、3S4Pスキームに従って組み立てられたリチウム電池のアセンブリによって駆動されます-3つの直列、4つの並列。 総容量は12 Vの電圧で約14 Ahです。推定によると、これで十分なはずですが、最終的な組み立ての後、もちろん実際の消費量を測定し、必要に応じてより多くのバッテリーを投入します。
このすべてに、着陸した成層圏気球を検索するGPSビーコンを追加します。 そして、サーバーやその他のデバイスの「家」は密閉ボックスになります。

極端な温度と圧力から繊細な機器を保護します。 同時に、放射線量を減らしますが、これは私たちのプロジェクトには何の役割も果たしませんが、サーバーは成層圏を短期間飛行し、背景はISSほど高くありません。
プロジェクトのWebサイトでメッセージを送信することに加えて、競争に参加して、プローブの着陸の場所を推測できます。 主な賞品は、ソユーズMS-13有人宇宙船を打ち上げるバイコヌールへの旅です。
